Изобретение относится к области железнодорожного транспорта, а именно, к тормозной системе легкорельсового транспортного средства.
Современное легкорельсовое транспортное средство (ЛТС), например, трамвай модели 71-931, имеет несколько независимых видов тормозов: электродинамический, электромеханический и электромагнитный рельсовый тормоз, найдено в интернет: https://sop.mosmetro.ru/wp-content/uploads/2022/03/TK-nastavniki-voditelej-tramvaev-2.pdf, стр. 35.
Электродинамический тормоз (он же рабочий) применяется для служебного торможения и снижения скорости до 3 км/ч. Электромеханический тормоз применятся при дотормаживании, когда эффективность электродинамического тормоза существенно снижена, или при недостаточном замедлении транспортного средства при электродинамическом торможении. Рельсовый тормоз используется только в качестве экстренного (аварийного) тормоза.
Все перечисленные виды тормозов управляются посредством электрического сигнала, поступающего с центрального блока управления торможением. Однако, при буксировании ЛТС локомотивом у машиниста локомотива нет возможности напрямую задавать управляющие сигналы для центрального блока управления. Машинист локомотива для торможения состава имеет возможность управлять только давлением в тормозной магистрали.
Заявленное изобретение может быть установлено на ЛТС и соединяться с пневматической тормозной магистралью локомотива при сцепке с одной стороны, и с другой стороны электронный блок управления преобразователя соединяется с центральным блоком управления ЛТС. Таким образом описываемое изобретение позволяет преобразовывать пневматический сигнал в тормозной магистрали локомотива в электрический сигнал, который позволит управлять электромеханическим тормозом ЛТС.
Известно требование по обеспечению возможности транспортировки легкорельсового транспортного средства локомотивом по железнодорожным путям при маневровых работах или буксировке в нештатных ситуациях. Препятствием к обеспечению данного требования является отсутствие на современном легкорельсовом транспортом средстве автоматического пневматического тормоза, в то время как маневровый локомотив осуществляет управление торможение при помощи автоматического пневматического тормоза путем изменения давления сжатого воздуха в тормозной магистрали.
Технический результат, заявленного пневмоэлектрического преобразователя, заключается в обеспечении возможности управления электромеханическими тормозами буксируемого легкорельсового транспортного средства по сигналу об изменении давления в тормозной магистрали буксирующего локомотива, что повышает безопасность движения подвижного состава во время буксирования и маневровых работах.
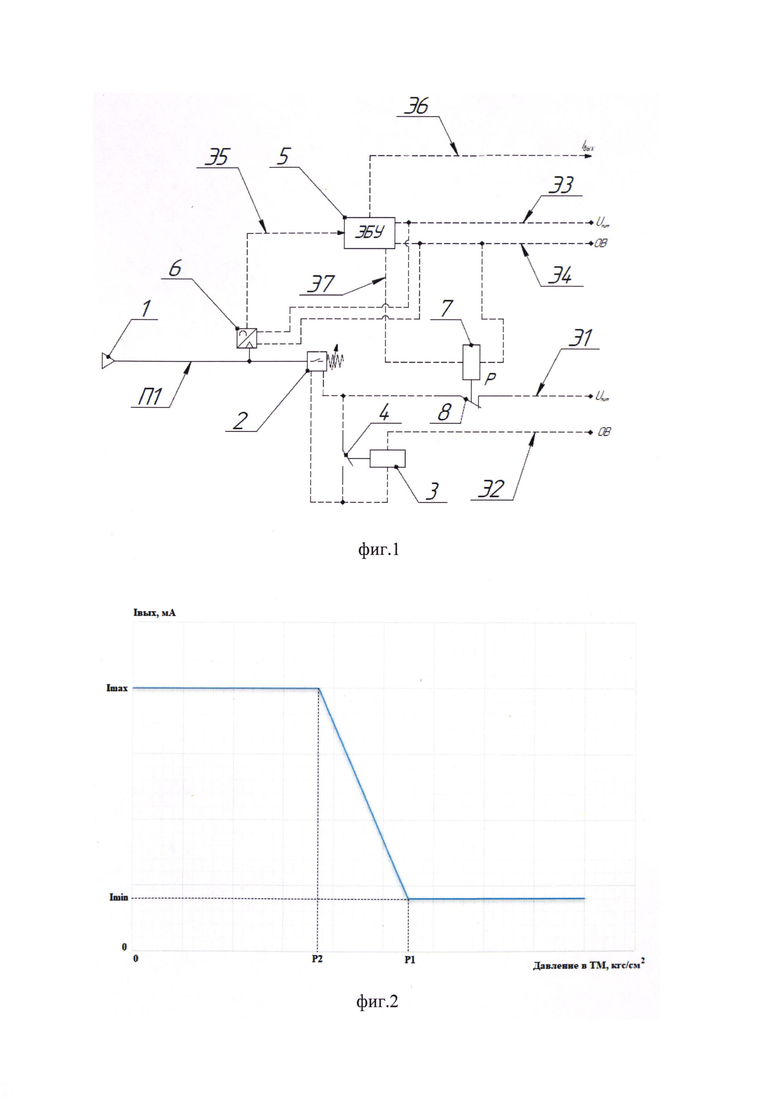
Указанный технический результат достигается тем, что пневмоэлектрический преобразователь системы управления торможением легкорельсового транспортного средства, содержащий сигнализатор давления и датчик давления, выполненные с возможностью соединения своими пневматическими входами с пневматической тормозной магистралью, электронный блок управления, электромагнитное реле-пускателя и электромагнитное реле отключения, при этом электромагнитное реле-пускателя выполнено с возможностью запитывания электрическим током через электрические линии связи Э1 и Э2, электронный блок управления и датчик давления выполнены с возможностью запитывания электрическим током через электрические линии связи Э3 и Э4, датчик давления выполнен с возможностью преобразования давления в пневматической тормозной магистрали в аналоговый электрический сигнал и передачи сигнала по линии связи Э5 на вход электронного блока управления, один выход которого связан с линией связи Э6, а другой выход - связан линией связи Э7 с электромагнитным реле отключения.
На фиг. 1 - изображена схема комбинированная функциональная пневмоэлектрического преобразователя.
На фиг. 2 - изображена зависимость сигнала на выходе с пневмоэлектрического преобразователя от давления в тормозной магистрали локомтотива.
При появлении давления сжатого воздуха в пневматической линии П1 соединенной с тормозной магистралью локомотива (1) нормально-разомкнутый контакт сигнализатора давления (2) замыкается, вследствие чего замыкается цепь управления преобразователем. Электрический ток проходит через линии Э1 и Э2 запитывая электромагнитное реле-пускателя (3), что приводит к замыканию контакта (4). Таким образом электромагнитное реле-пускателя (3) будет удерживать контакт (4) замкнутым вне зависимости от состояния нормально-разомкнутого контакта сигнализатора давления (2). Появление электрического тока через линию Э1 и Э2 является сигналом к активации пневмоэлектрического преобразователя, после которого система управления верхнего уровня легкорельсового транспортного средства замыкает цепь управления Э3-Э4 тем самым запитывая электронный блок управления (5) и датчик давления (6). Датчик давления (6) преобразует давление в тормозной магистрали (1) локомотива в аналоговый электрический сигнал, который по линии Э5 поступает на вход электронного блока управления (5). Электронный блок управления (5) преобразует аналоговый сигнал линии Э5 в аналоговый сигнал линии Э6 согласно закону, представленному на фиг. 2, где Р1 - поездное давление, Р2 - давление полного служебного торможения. После отсоединения локомотива от легкорельсового транспортного средства давление сжатого воздуха в линии П1 снижается до 0 кгс/см2. После получения сигнала с датчика давление (6) о том, что давление в линии П1 стало равным 0 кгс/см2, электронный блок управления (5) запускает таймер задержки отключения пневмоэлектрического преобразователя. Данная задержка необходима для обеспечения экстренного торможения подвижного состава, т.к. при экстренном торможении машинист локомотива снижает давление в тормозной магистрали (1) до 0 кгс/см2. При истечении времени задержки электронный блок управления (5) замыкает электрическую цепь Э7-Э4, вследствие чего запитывается электромагнитное реле отключения (7), которое размыкает контакт (8), что приводит к размыканию электрической цепи Э1-Э2 и отключению пневмоэлектрического преобразователя.
Таким образом, заявленного изобретения позволяет буксирующему локомотиву в автоматическом режиме активировать и дезактивировать систему управления электромеханическими тормозами легкорельсового транспортного средства и управлять усилием торможения посредством изменения давления сжатого воздуха в тормозной магистрали локомотива, что обеспечивает выполнение требований по возможности транспортировки легкорельсового транспортного средства локомотивом по железнодорожным путям при маневровых работах или буксировке в нештатных ситуациях и повышает безопасность движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК АДАПТИВНОГО УПРАВЛЕНИЯ ТОРМОЗОМ ТЕЛЕЖКИ | 2012 |
|
RU2524751C1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2758581C1 |
| Система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2750559C1 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444454C1 |
| ЭЛЕКТРОВОЗДУХОРАСПРЕДЕЛИТЕЛЬ ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2669474C1 |
| ТОРМОЗ ПАССАЖИРСКОГО ВАГОНА | 2005 |
|
RU2298501C1 |
| ПРИВОД ТОКОРАЗЪЕДИНИТЕЛЯ КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2010 |
|
RU2419908C1 |
| Система управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2773117C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УРАВНИТЕЛЬНЫМ ОРГАНОМ КРАНА МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2182541C1 |
| Тормозная система многосекционного железнодорожного тягового средства | 1990 |
|
SU1773761A2 |
Изобретение относится к области железнодорожного транспорта, а именно к тормозной системе легкорельсового транспортного средства. Пневмоэлектрический преобразователь системы управления торможением легкорельсового транспортного средства содержит сигнализатор давления и датчик давления, выполненные с возможностью соединения своими пневматическими входами с пневматической тормозной магистралью, электронный блок управления, электромагнитное реле пускателя и электромагнитное реле отключения, при этом электромагнитное реле пускателя выполнено с возможностью запитывания электрическим током через электрические линии связи Э1 и Э2, электронный блок управления и датчик давления выполнены с возможностью запитывания электрическим током через электрические линии связи Э3 и Э4, датчик давления выполнен с возможностью преобразования давления в пневматической тормозной магистрали в аналоговый электрический сигнал и передачи сигнала по линии связи Э5 на вход электронного блока управления, один выход которого связан с линией связи Э6, а другой выход связан линией связи Э7 с электромагнитным реле отключения. Техническим результатом является обеспечение возможности управления электромеханическими тормозами буксируемого легкорельсового транспортного средства по сигналу об изменении давления в тормозной магистрали буксирующего локомотива, что повышает безопасность движения подвижного состава во время буксирования и маневровых работ. 2 ил.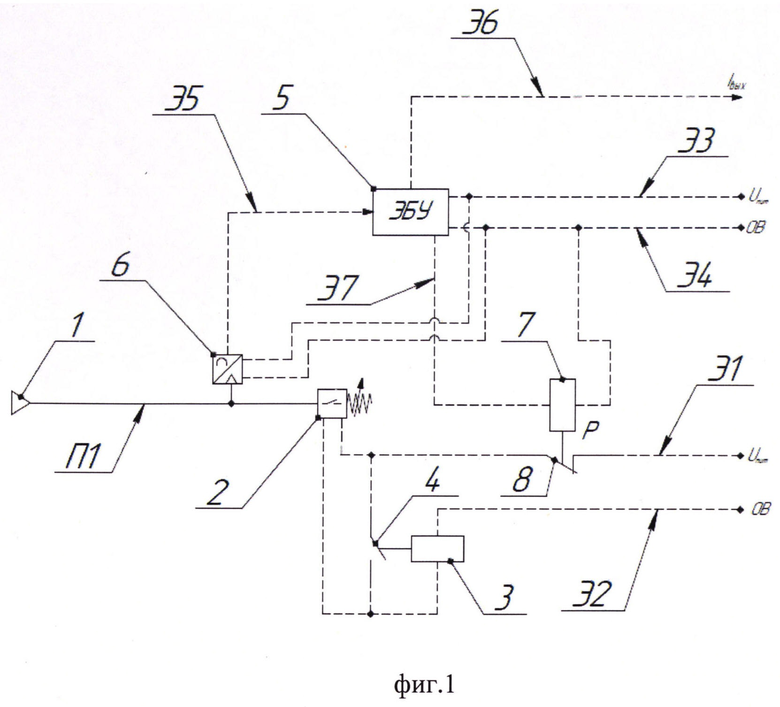
Пневмоэлектрический преобразователь системы управления торможением легкорельсового транспортного средства, содержащий сигнализатор давления и датчик давления, выполненные с возможностью соединения своими пневматическими входами с пневматической тормозной магистралью, электронный блок управления, электромагнитное реле пускателя и электромагнитное реле отключения, при этом электромагнитное реле пускателя выполнено с возможностью запитывания электрическим током через электрические линии связи Э1 и Э2, электронный блок управления и датчик давления выполнены с возможностью запитывания электрическим током через электрические линии связи Э3 и Э4, датчик давления выполнен с возможностью преобразования давления в пневматической тормозной магистрали в аналоговый электрический сигнал и передачи сигнала по линии связи Э5 на вход электронного блока управления, один выход которого связан с линией связи Э6, а другой выход связан линией связи Э7 с электромагнитным реле отключения.
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ ПОЕЗДА | 0 |
|
SU308897A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТОРМОЗНОЙ СИСТЕМОЙ | 1999 |
|
RU2238199C2 |
| ТОРМОЗ ПАССАЖИРСКОГО ВАГОНА | 2005 |
|
RU2298501C1 |

