ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству управления торможением и способу управления торможением для автоматического управления основным тормозным устройством, обычно используемым для торможения рассматриваемого транспортного средства во время движения, и вторым тормозным устройством, используемым для поддержания рассматриваемого транспортного средства в неподвижном состоянии.
УРОВЕНЬ ТЕХНИКИ
[0002] В обычной системе помощи при вождении, такой как адаптивная система круиз-контроля, управление осуществляется таким образом, что рассматриваемое транспортное средство останавливается после замедления и остановки следующего впереди транспортного средства путем автоматического управления основным тормозным устройством, которое представляет собой гидравлический тормоз, после чего транспортное средство переходит в состояние удержания транспортного средства неподвижным. Патентный документ 1 раскрывает такое обычное устройство управления движением для автоматического управления основным тормозным устройством. Здесь, когда рассматриваемое транспортное средство удерживается в неподвижном состоянии, тормозное усилие от основного тормозного устройства ограничено заданным временем, после чего осуществляется управление для переключения на второе тормозное устройство, такое как стояночный тормоз. Это связано с тем, что основное тормозное устройство увеличивает гидравлическое давление с помощью насоса для обеспечения тормозного усилия, и, таким образом, учитывается долговечность насоса.
Документы известного уровня техники
Патентные документы
[0003] Патентный документ 1: Выложенная заявка на патент Японии № 2010-95189.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Проблема, решаемая изобретением
[0004] Однако, поскольку второе тормозное устройство обычно выполнено с возможностью торможения только двух задних колес транспортного средства, при переключении с основного тормозного устройства на второе тормозное устройство состояние, в котором все четыре колеса тормозятся основным тормозным устройством, переключается на состояние, в котором тормозятся только два колеса. Однако в ситуациях, в которых вероятно возникновение скольжения, например, на дорожных поверхностях с низким коэффициентом трения или на дорогах с крутым уклоном, существует вероятность того, что вес транспортного средства не может удерживаться, так что неподвижное состояние не может поддерживаться. В настоящее время существует проблема, заключающаяся в том, что, даже если звучит сигнал тревоги, чтобы предупредить водителя, время между началом звучания сигнала тревоги и началом скольжения транспортного средства слишком мало, так что водителю недостаточно времени для приведения в действие основного тормозного устройства.
[0005] В частности, когда транспортное средство останавливается системой помощи при вождении, такой как адаптивная система круиз-контроля, если водитель отстегивает ремень безопасности и открывает дверь, система помощи при вождении подвергается аварийному отключению, и основное тормозное устройство немедленно переключается на второе тормозное устройство. В этом случае водитель находится в состоянии, не подходящем для вождения, например, с отстегнутым ремнем безопасности или открытой дверью, так что, даже если водитель попытается привести в действие основное тормозное устройство, для того чтобы остановить кузов транспортного средства, который начинает скользить, не может быть гарантировано достаточно времени для выполнения действия.
[0006] В связи с этим с учетом обстоятельств, описанных выше, задачей настоящего изобретения является обеспечение устройства управления торможением и способа управления торможением, с помощью которых возможно обеспечивать то, что у водителя будет достаточно времени для приведения в действие основного тормозного устройства, даже если основное тормозное устройство переключено на второе тормозное устройство в ситуации, в которой происходит скольжение.
Средство выполнения задачи
[0007] Для того чтобы выполнить задачу, описанную выше, устройство управления торможением и способ управления торможением согласно одному варианту выполнения настоящего изобретения прогнозируют степень скольжения, которая указывает на вероятность скольжения рассматриваемого транспортного средства, и осуществляют переключение с основного тормозного устройства на второе тормозное устройство, когда рассматриваемое транспортное средство находится в состоянии удержания транспортного средства неподвижным, выполняемым основным тормозным устройством. В это время момент времени, с которого тормозное усилие основного тормозного устройства падает до или ниже заданного значения, задерживается по мере увеличения прогнозируемой степени скольжения.
Технические результаты изобретения
[0008] Согласно настоящему изобретению, даже если основное тормозное устройство переключается на второе тормозное устройство в ситуации, в которой скольжение вероятно, и рассматриваемое транспортное средство начинает скользить, поскольку, момент времени, с которого тормозное усилие основного тормозного устройства уменьшается, задерживается в соответствии со степенью скольжения, возможно обеспечивать, что у водителя будет достаточно времени для приведения в действие основного тормозного устройства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
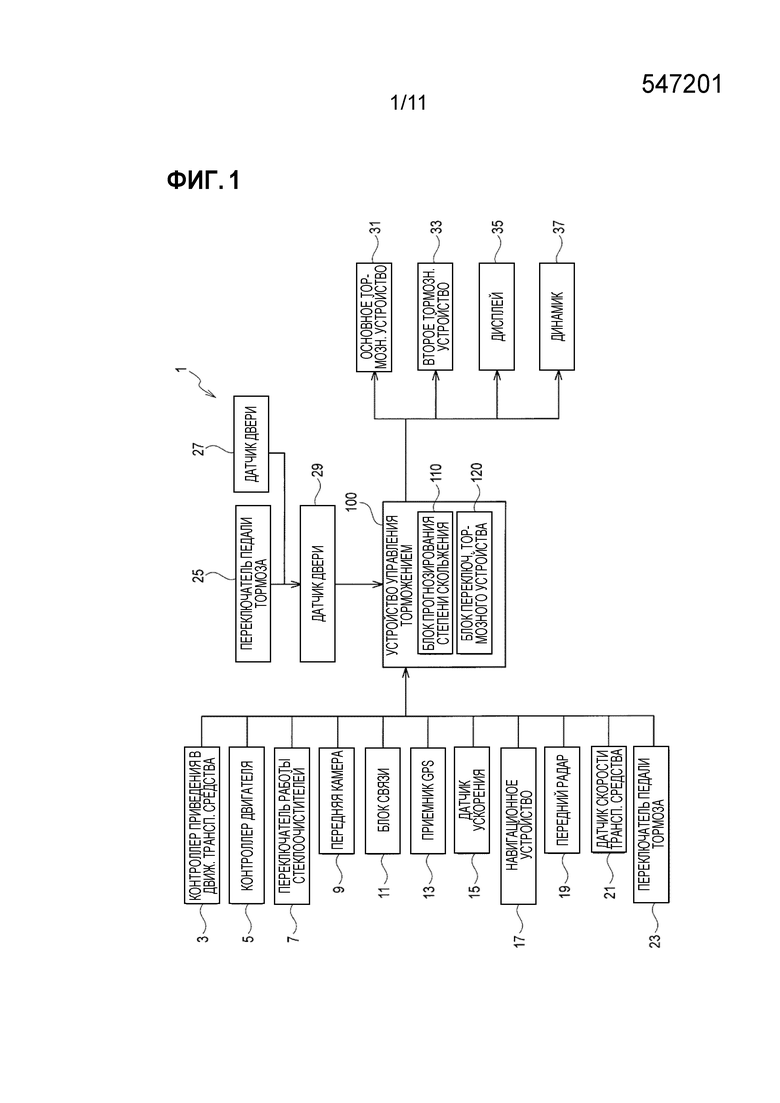
[0009] Фигура 1 представляет собой структурную схему, иллюстрирующую конфигурацию системы управления торможением в соответствии с первым вариантом выполнения настоящего изобретения.
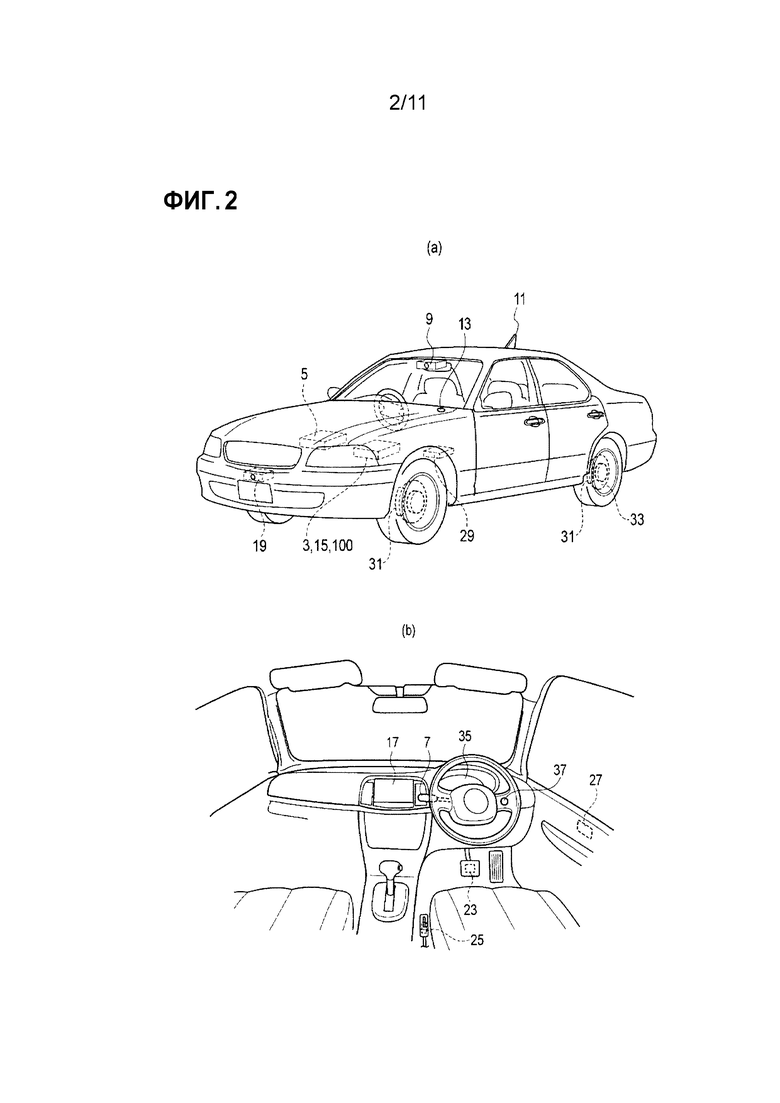
Фигура 2 представляет собой вид для объяснения расположения системы управления торможением на транспортном средстве в соответствии с первым вариантом выполнения настоящего изобретения.
Фигура 3 представляет собой вид для объяснения способа прогнозирования степени скольжения устройством управления торможением в соответствии с первым вариантом выполнения настоящего изобретения.
Фигура 4 представляет собой вид для объяснения способа прогнозирования степени скольжения устройством управления торможением в соответствии с первым вариантом выполнения настоящего изобретения.
Фигура 5 представляет собой блок-схему, иллюстрирующую обработку процесса управления торможением устройством управления торможением в соответствии с первым вариантом выполнения настоящего изобретения.
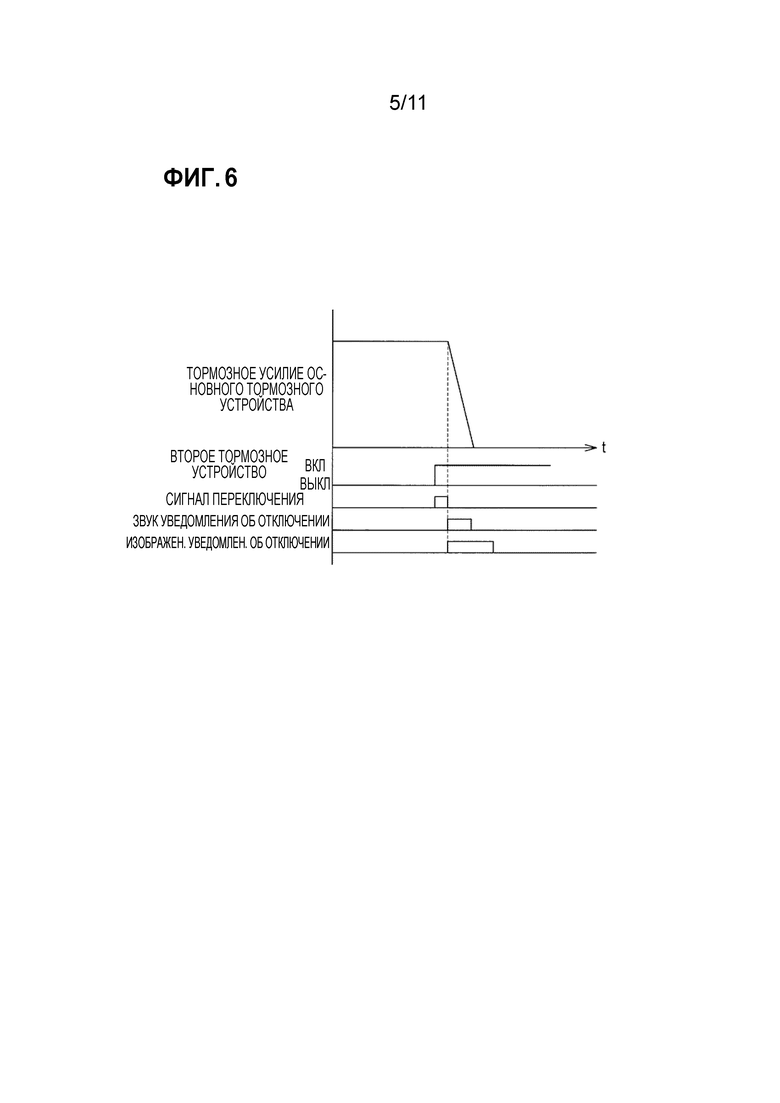
Фигура 6 представляет собой вид для объяснения способа переключения с основного тормозного устройства на второе тормозное устройство в нормальном состоянии с помощью устройства управления торможением в соответствии с первым вариантом выполнения настоящего изобретения.
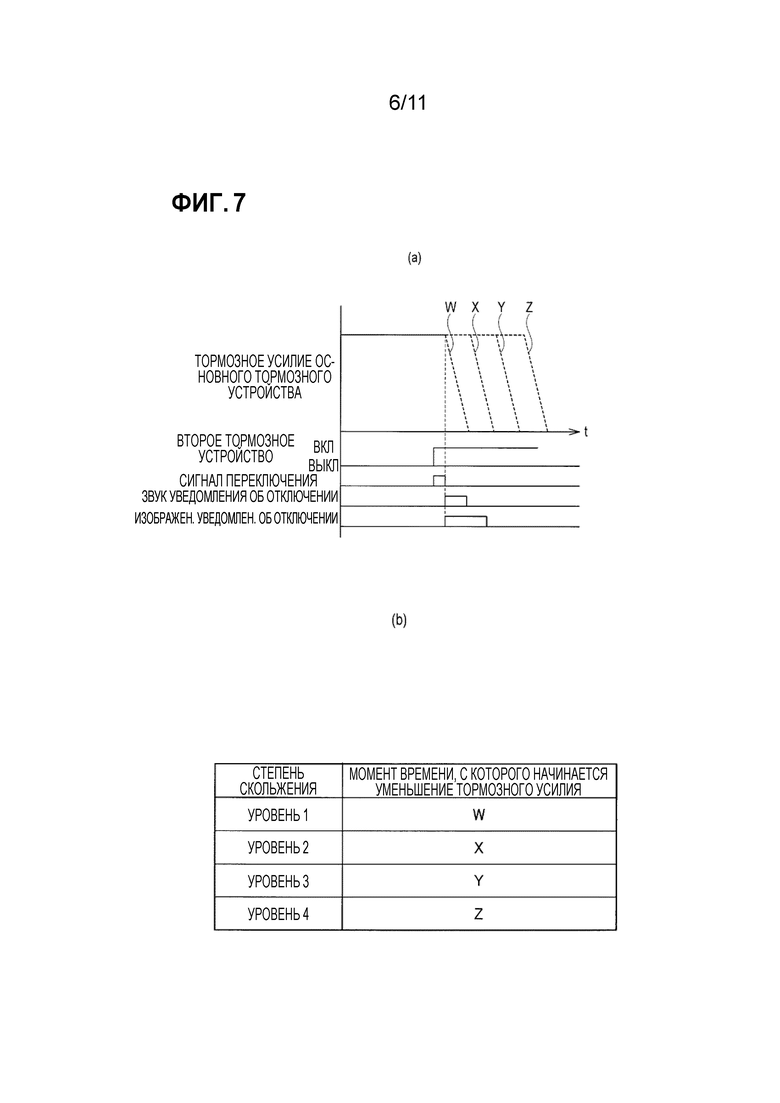
Фигура 7 представляет собой вид для объяснения способа переключения с основного тормозного устройства на второе тормозное устройство в аварийной ситуации с помощью устройства управления торможением в соответствии с первым вариантом выполнения настоящего изобретения.
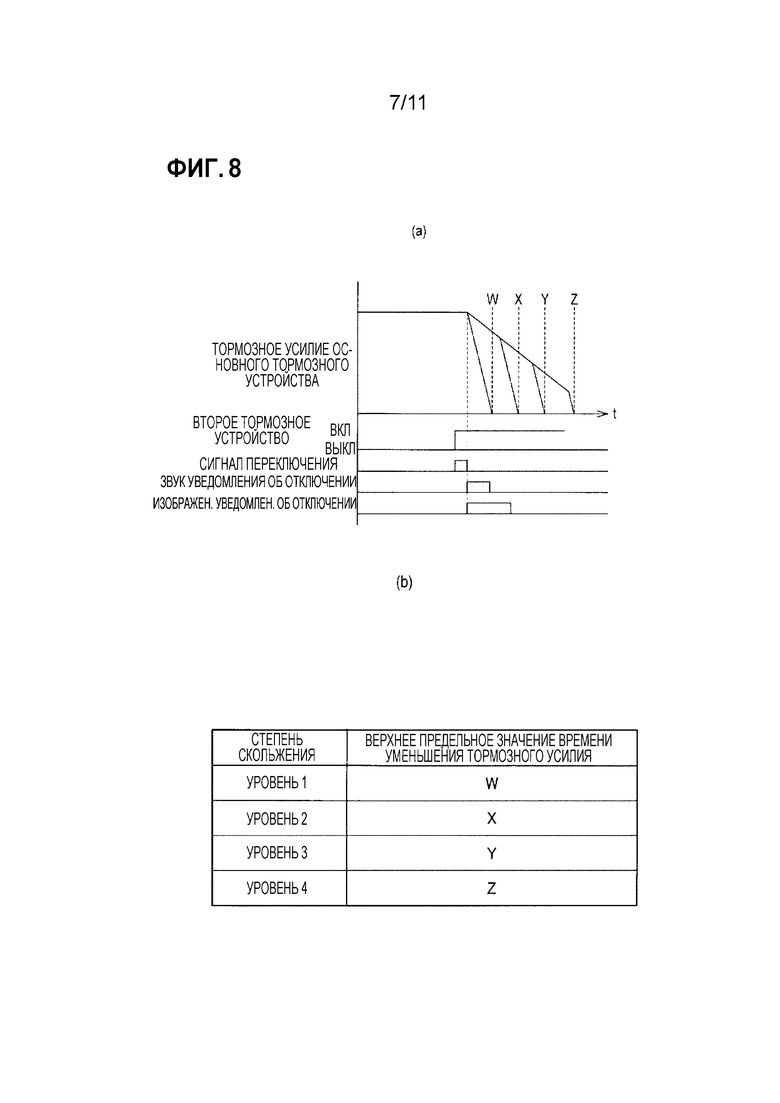
Фигура 8 представляет собой вид для объяснения способа переключения с основного тормозного устройства на второе тормозное устройство в аварийной ситуации с помощью устройства управления торможением в соответствии с первым вариантом выполнения настоящего изобретения.
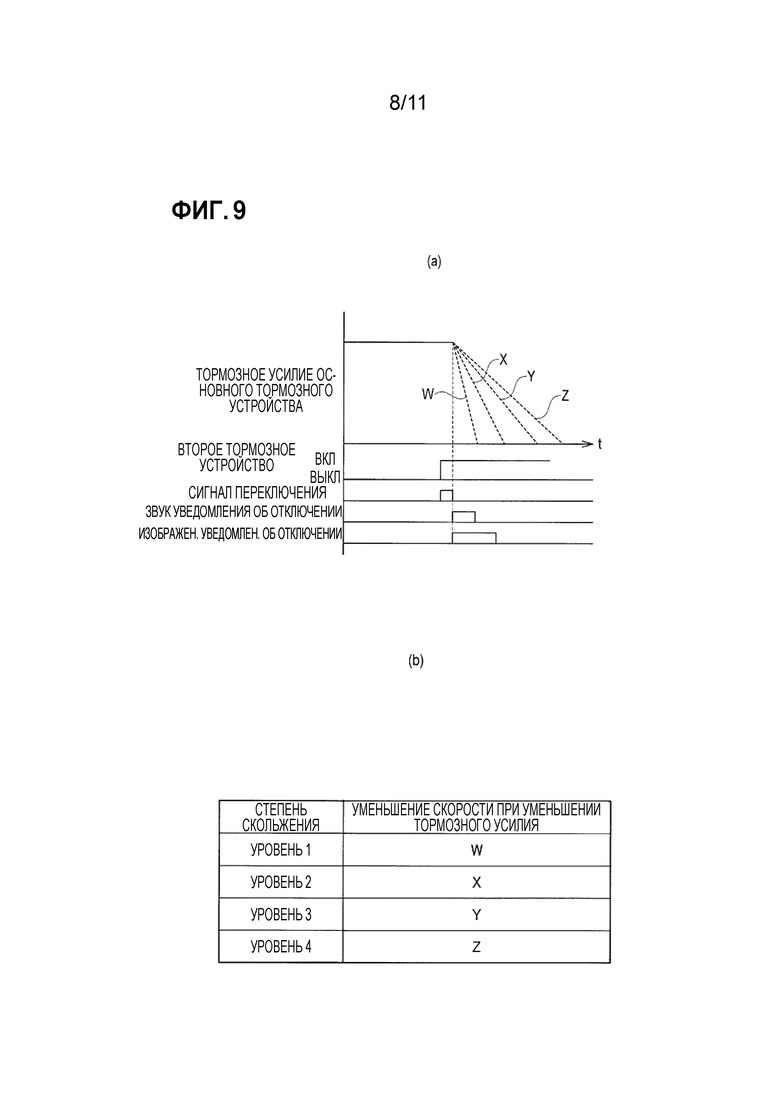
Фигура 9 представляет собой вид для объяснения способа переключения с основного тормозного устройства на второе тормозное устройство в аварийной ситуации с помощью устройства управления торможением в соответствии с модифицированным примером настоящего изобретения.
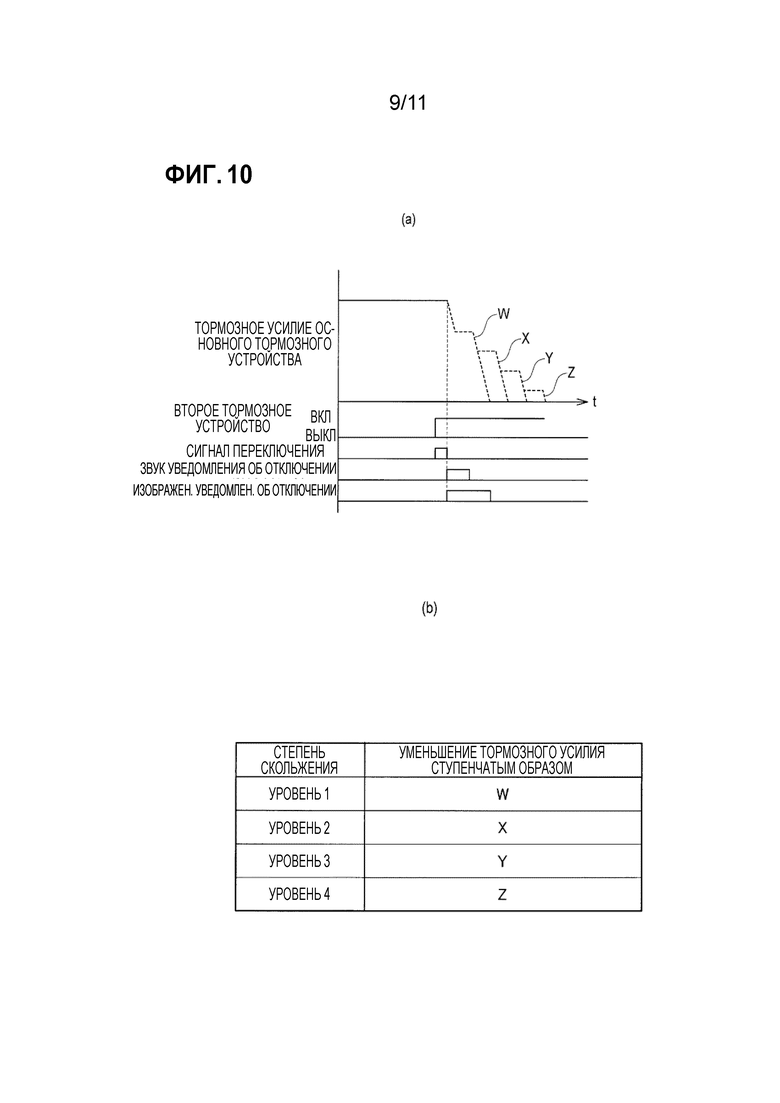
Фигура 10 представляет собой вид для объяснения способа переключения с основного тормозного устройства на второе тормозное устройство в аварийной ситуации с помощью устройства управления торможением в соответствии с модифицированным примером настоящего изобретения.
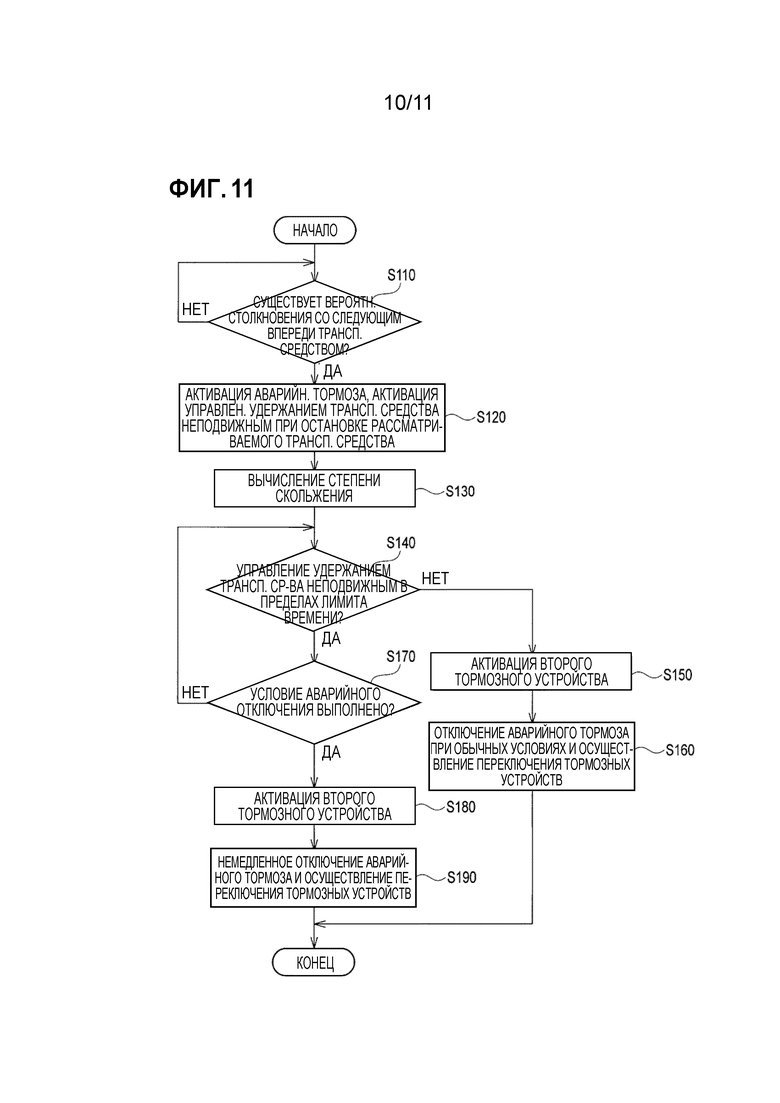
Фигура 11 представляет собой блок-схему, иллюстрирующую обработку процесса управления торможением устройством управления торможением в соответствии со вторым вариантом выполнения настоящего изобретения.
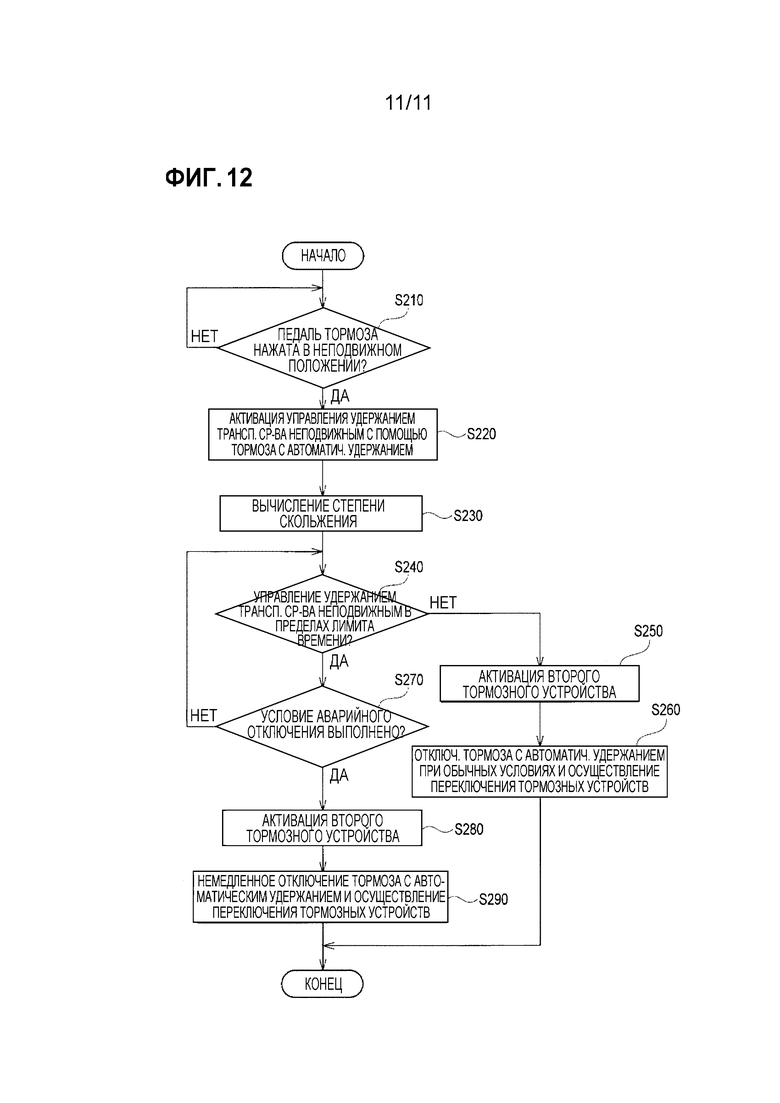
Фигура 12 представляет собой блок-схему, иллюстрирующую обработку процесса управления торможением устройством управления торможением в соответствии с третьим вариантом выполнения настоящего изобретения.
Варианты выполнения изобретения
[0010] С первого по третий варианты выполнения, к которым применяется настоящее изобретение, описаны ниже со ссылкой на чертежи. Во всех вариантах выполнения одинаковым компонентам присвоены одинаковые ссылочные позиции, и их подробные описания опущены.
[0011] [Первый вариант выполнения]
[Конфигурация системы управления торможением]
Фигура 1 представляет собой структурную схему, иллюстрирующую конфигурацию системы управления торможением, оборудованной устройством управления торможением согласно настоящему варианту выполнения. Фигура 2 представляет собой вид, иллюстрирующий расположение системы управления торможением на транспортном средстве согласно настоящему варианту выполнения. Система 1 управления торможением согласно настоящему варианту выполнения содержит контроллер 3 приведения в движение транспортного средства, контроллер 5 двигателя, переключатель 7 работы стеклоочистителей, переднюю камеру 9, блок 11 связи и приемник 13 GPS, как показано на Фигуре 1. В дополнение, система 1 управления торможением содержит датчик 15 ускорения, навигационное устройство 17, передний радар 19, датчик 21 скорости транспортного средства, переключатель 23 педали тормоза, датчик 25 ремня безопасности и датчик 27 двери. Более того, система 1 управления торможением содержит контроллер 29 помощи при вождении, основное тормозное устройство 31, второе тормозное устройство 33, дисплей 35, динамик 37 и устройство 100 управления торможением. Система 1 управления торможением, выполненная таким образом, установлена на транспортном средстве, и транспортное средство, на котором установлена система, оборудована системой, такой как адаптивная система круиз-контроля, для движения и следования за следующим впереди транспортным средством перед рассматриваемым транспортным средством.
[0012] Контроллер 3 приведения в движение транспортного средства содержит системы для управления движением транспортного средства, такие как антиблокировочная тормозная система, система контроля тяги, динамическая система управления транспортным средством и т.п.
[0013] Контроллер 5 двигателя управляет двигателем. Существует переключатель для выбора режима работы двигателя вблизи от сиденья водителя транспортного средства; когда выбран режим «снег», возможно предотвращать скольжение шин, подавляя внезапное вращение двигателя, даже если педаль газа внезапно нажимается при нахождении на поверхности дороги с низким коэффициентом трения. Состояние контроллера 5 двигателя используется для определения того, имеет ли поверхность дороги низкий коэффициент трения.
[0014] Переключатель 7 работы стеклоочистителей приводит в действие стеклоочиститель для уборки осадков в виде дождя, снега и т.п. на переднем окне. Состояние переключателя 7 работы стеклоочистителей используется для определения того, имеет ли поверхность дороги низкий коэффициент трения.
[0015] Передняя камера 9 захватывает изображение того, что находится перед рассматриваемым транспортным средством, и получает изображение. Расстояние между транспортными средствами и скорость следующего впереди транспортного средства относительно рассматриваемого транспортного средства определяются на основе захваченного изображения, и информация об уклоне и скольжении, отображаемая на дорожных знаках и электронных дорожных знаках, считывается заранее. Эта информация используются для определения того, имеет ли поверхность дороги низкий коэффициент трения, и имеет ли дорога крутой наклон.
[0016] Блок 11 связи отправляет и принимает информацию от информационной службы связи, которая использует связь дорожной инфраструктуры с транспортным средством или мобильную телефонную линию. Принятая информация, информация о погоде и скольжении используются для определения того, имеет ли поверхность дороги низкий коэффициент трения.
[0017] Приемник 13 GPS принимает информацию о текущем времени в дополнение к долготе, широте и высоте рассматриваемого транспортного средства над уровнем моря с помощью спутника. Северные широты, как правило, связаны с низкими температурами, как и большие высоты над уровнем моря; в связи с этим такая информация может использоваться для определения того, имеет ли поверхность дороги низкий коэффициент трения. В дополнение, также возможно определять, наклонена ли дорога, на основе информации об истории высот над уровнем моря.
[0018] Датчик 15 ускорения измеряет ускорение, которое применяется к рассматриваемому транспортному средству. В неподвижном состоянии возможно обнаруживать наклон рассматриваемого транспортного средства путем измерения компонента гравитационного ускорения. Таким образом, возможно определять, наклонена ли дорога.
[0019] Навигационное устройство 17 электронным образом хранит картографическую информацию и вычисляет маршрут направления рассматриваемого транспортного средства к месту назначения. Дополнительно, навигационное устройство хранит информацию об уклоне дороги.
[0020] Передний радар 19 использует миллиметровые волны для измерения расстояния между транспортными средствами и скорость следующего впереди транспортного средства относительно рассматриваемого транспортного средства. Датчик 21 скорости транспортного средства измеряет скорость рассматриваемого транспортного средства. Переключатель 23 педали тормоза обнаруживает, нажата ли педаль тормоза. Датчик 25 ремня безопасности обнаруживает, закреплен ли ремень безопасности. Датчик 27 двери обнаруживает открытое/закрытое состояние двери.
[0021] Контроллер 29 помощи при вождении управляет системой автоматического вождения и системой помощи при вождении, такими как адаптивная система круиз-контроля, система экстренного торможения, тормоз с автоматическим удержанием и т.п. В дополнение, может быть обеспечена система, в которой в адаптивную систему круиз-контроля добавлена функция рулевого управления. Контроллер 29 помощи при вождении использует переднюю камеру 9 и передний радар 19 для определения присутствия/отсутствия следующего впереди транспортного средства и измерения расстояния между транспортными средствами, и посылает команды контроллеру 5 двигателя и устройству 100 управления торможением для осуществления ускорения/замедления рассматриваемого транспортного средства. Далее, если следующее впереди транспортное средство останавливается, рассматриваемое транспортное средство также останавливается, и выполняется управление удержанием транспортного средства неподвижным. Контроллер 29 помощи при вождении выполняет управление скоростью транспортного средства для движения, в то время как заданная скорость транспортного средства удерживается постоянной, когда следующее впереди транспортное средство отсутствует, и выполняет управление поддержанием пространства между транспортными средствами для движения, в то время как расстояние между транспортными средствами относительно следующего впереди транспортного средства удерживается постоянным, когда следующее впереди транспортное средство присутствует.
[0022] Основное тормозное устройство 31 представляет собой тормоз, который обычно используется для торможения рассматриваемого транспортного средства при движении и увеличивает гидравлическое давление (давление тормозной жидкости) с помощью насоса в сочетании с педалью тормоза, чтобы прижимать тормозную колодку к тормозному диску, для того чтобы затормозить рассматриваемое транспортное средство. Основное тормозное устройство 31 выполнено с возможностью прикладывания тормозного усилия к четырем колесам рассматриваемого транспортного средства.
[0023] Второе тормозное устройство 33 представляет собой тормоз, который используется для удержания неподвижного состояния рассматриваемого транспортного средства, такой как колодочный тормоз и стояночный тормоз, и выполнен с возможностью прикладывания тормозного усилия к двум задним колесам рассматриваемого транспортного средства.
[0024] Дисплей 35 отображает состояния систем адаптивной системы круиз-контроля, системы экстренного торможения, тормоза с автоматическим удержанием, и т.п., а также имеет функцию отображения рабочего состояния второго тормозного устройства 33. Динамик 37 выводит голосовые звуки синхронно с дисплеем во время предоставления информации или предупреждения от адаптивной системы круиз-контроля, системы экстренного торможения, тормоза с автоматическим удержанием или т.п.
[0025] Устройство 100 управления торможением представляет собой контроллер, который принимает команду от контроллера 29 помощи при вождении и автоматически управляет основным тормозным устройством 31 и вторым тормозным устройством 33 для выполнения управления торможением рассматриваемого транспортного средства. В настоящем варианте выполнения устройство управления торможением объединено с контроллером 3 приведения в движение транспортного средства и установлено на рассматриваемом транспортном средстве. Устройство 100 управления торможением управляет основным тормозным устройством 31 в соответствии с командами от адаптивной системы круиз-контроля, системы экстренного торможения и тормоза с автоматическим удержанием для выполнения управления удержанием транспортного средства неподвижным. Далее, когда превышен лимит времени управления удержанием транспортного средства неподвижным, основное тормозное устройство 31 переключается на второе тормозное устройство 33, и основное тормозное устройство 31 выключается. Однако даже в пределах лимита времени управления удержанием транспортного средства неподвижным, если обнаружено условие аварийного отключения, например, когда ремень безопасности водителя отстегнут или дверь открыта, основное тормозное устройство 31 переключается на второе тормозное устройство 33, и основное тормозное устройство 31 выключается. Устройство 100 управления торможением, имеющее такие функции, содержит блок 110 прогнозирования степени скольжения и блок 120 переключения тормозного устройства.
[0026] Блок 110 прогнозирования степени скольжения прогнозирует степень скольжения, которая представляет собой вероятность того, что рассматриваемое транспортное средство будет скользить. Степень скольжения приобретает большее значение по мере увеличения вероятности скольжения, как описано ниже. Блок 110 прогнозирования степени скольжения вычисляет прогнозируемую степень коэффициента трения, которая прогнозирует коэффициент трения дороги, по которой движется рассматриваемое транспортное средство, вычисляет прогнозируемую степень уклона, которая прогнозирует уклон дороги, по которой движется рассматриваемое транспортное средство, и прогнозирует степень скольжения, умножая две прогнозируемые степени. То есть
степень скольжения=прогнозируемая степень коэффициента трения x прогнозируемая степень уклона.
Однако степень скольжения может быть спрогнозирована с использованием только прогнозируемой степени коэффициента трения или только прогнозируемой степени уклона.
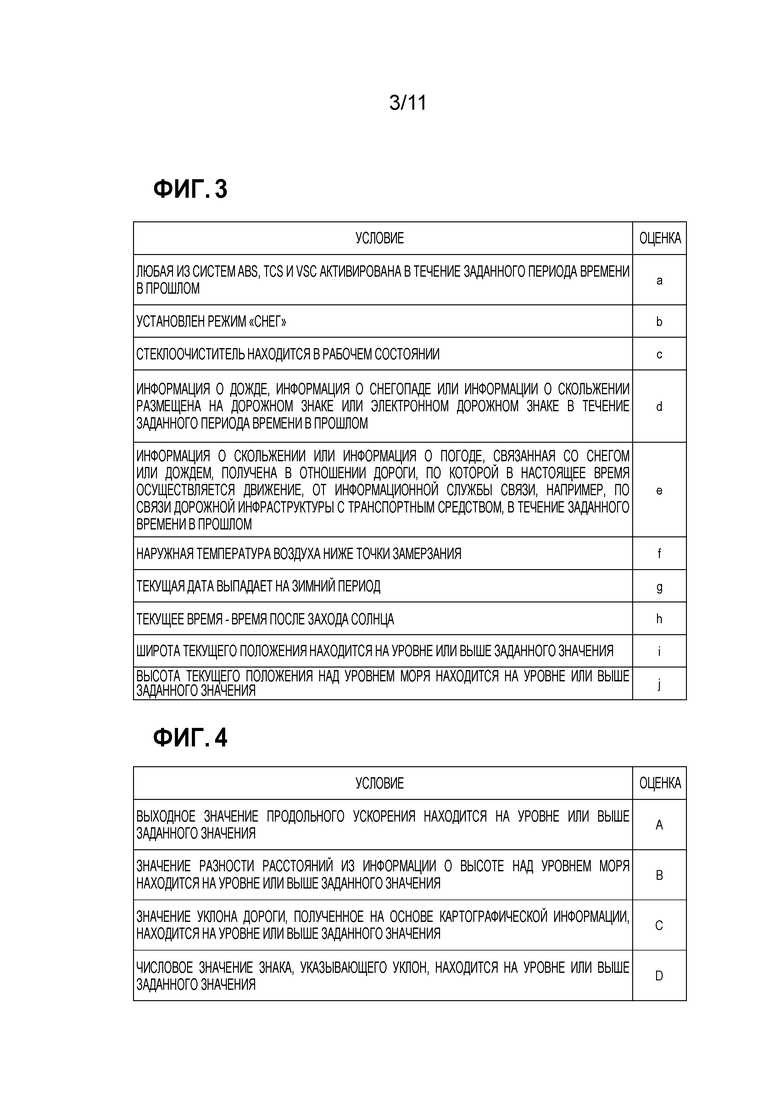
[0027] Сначала будет описан способ вычисления прогнозируемой степени коэффициента трения. Блок 110 прогнозирования степени скольжения вычисляет прогнозируемую степень коэффициента трения, складывая оценки условий, показанных на Фигуре 3. То есть
прогнозируемая степень коэффициента трения=a+b+c+d+e+f+g+h+i+j.
[0028] Блок 110 прогнозирования степени скольжения присваивает оценку a, когда имеется история работы системы, которая управляет вождением или торможением рассматриваемого транспортного средства в течение заданного периода времени в прошлом, как проиллюстрировано на Фигуре 3. Целевая система представляет собой по меньшей мере одну из антиблокировочной тормозной системы (ABS), системы контроля тяги (TCS) и системы контроля устойчивости транспортного средства (VSC).
[0029] Дополнительно, блок 110 прогнозирования степени скольжения присваивает оценку b, когда режим движения рассматриваемого транспортного средства установлен на режим «снег», и присваивает оценку c, когда стеклоочиститель рассматриваемого транспортного средства находится в рабочем состоянии. Более того, блок 110 прогнозирования степени скольжения присваивает оценку d в соответствии с дорожными знаками вокруг рассматриваемого транспортного средства. Например, если какая-либо из информации о дожде, информации о снегопаде и информации о скольжении размещена на дорожном знаке или электронном дорожном знаке в течение заданного периода времени в прошлом, присваивается оценка d.
[0030] Дополнительно, блок 110 прогнозирования степени скольжения присваивает оценки e и f в соответствии с информацией об окружающей дорожной среде вокруг рассматриваемого транспортного средства. Например, оценка e дается, если информация о скольжении или информация о погоде, связанная со снегом или дождем, получена в отношении дороги, по которой в настоящее время осуществляется движение, от информационной службы связи, например, по связи дорожной инфраструктуры с транспортным средством, в течение заданного времени в прошлом, и оценка f присваивается, если температура наружного воздуха ниже точки замерзания.
[0031] Более того, блок 110 прогнозирования степени скольжения присваивает оценки на основе текущей даты и времени; например, оценка g присваивается, если текущая дата выпадает на зимний период, и оценка h присваивается, если текущее время - время после захода солнца. Дополнительно, относительно информации о положении рассматриваемого транспортного средства оценка i присваивается, если широта текущего положения больше или равна заданному значению, и оценка j присваивается, если высота текущего положения над уровнем моря больше или равна заданному значению. Те же самые оценки могут быть установлены для всех этих оценок a-j, или более высокие оценки могут быть установлены для важных условий.
[0032] Таким образом, в прогнозируемой степени коэффициента трения оценка увеличивается по мере того, как прогнозируется, что коэффициент трения дороги, по которой движется рассматриваемое транспортное, будет ниже. В связи с этим прогнозируемая степень коэффициента трения прогнозирует, насколько низким будет коэффициент трения дороги, по которой движется рассматриваемое транспортное средство.
[0033] Далее будет описан способ вычисления прогнозируемой степени уклона. Блок 110 прогнозирования степени скольжения вычисляет прогнозируемую степень уклона, выбирая максимальное значение из оценок условий, показанных на Фигуре 4. То есть
прогнозируемая степень уклона=MAX(A, B C, D)
[0034] Блок 110 прогнозирования степени скольжения присваивает оценку A, когда выходное значение продольного ускорения датчика 15 ускорения представляет собой заданное значение или больше заданного значения, как проиллюстрировано на Фигуре 4. В дополнение, оценка B присваивается, когда значение разности расстояний из информации о высоте рассматриваемого транспортного средства над уровнем моря Δh/Δx (Δh: значение разницы высот над уровнем моря, Δx: значение разницы расстояний), получаемое от приемника 13 GPS, представляет собой заданное значение или больше заданного значения.
[0035] Более того, блок 110 прогнозирования степени скольжения присваивает оценку C, когда значение уклона дороги в картографической информации вокруг рассматриваемого транспортного средства, получаемое от навигационного устройства 17, представляет собой заданное значение или больше заданного значения. В дополнение, оценка D присваивается, когда числовое значение знака, указывающего уклон на дорожном знаке вокруг рассматриваемого транспортного средства, представляет собой заданное значение или больше заданного значения. Для этих оценок A-D устанавливаются различные оценки, и наивысшая оценка из данных оценок вычисляется как прогнозируемая степень уклона. Однако оценки A-D могут включать в себя одни и те же оценки.
[0036] Таким образом, в прогнозируемой степени уклона оценка увеличивается по мере того, как прогнозируется, что уклон дороги, по которой движется рассматриваемое транспортное средство, будет больше. В связи с этим прогнозируемая степень уклона прогнозирует величину уклона дороги, по которой движется рассматриваемое транспортное средство.
[0037] Блок 120 переключения тормозного устройства выполняет управление для переключения с основного тормозного устройства 31 на второе тормозное устройство 33, когда рассматриваемое транспортное средство находится в состоянии удержания транспортного средства неподвижным с помощью основного тормозного устройства 31, если истек лимит времени управления удержанием транспортного средства неподвижным, или, если выполнено условие аварийного отключения системы помощи при вождении. В это время блок 120 переключения тормозного устройства задерживает момент времени, с которого тормозное усилие основного тормозного устройства 31 падает до или ниже заданного значения, когда увеличивается степень скольжения, прогнозируемая блоком 110 прогнозирования степени скольжения. Конкретно, в качестве способа задержки момента времени, с которого падает тормозное усилие основного тормозного устройства 31, в настоящем варианте выполнения задерживается момент времени, с которого начинается снижение тормозного усилия основного тормозного устройства 31. Таким образом, поскольку момент времени, с которого уменьшается тормозное усилие основного тормозного устройства 31, задерживается в соответствии со степенью скольжения, возможно обеспечивать, что у водителя будет достаточно времени для приведения в действие основного тормозного устройства, даже если рассматриваемое транспортное средство начинает скользить из-за переключения тормозных устройств.
[0038] Устройство 100 управления торможением выполнено на основе электронной схемы общего назначения, включающей в себя микрокомпьютер, микропроцессор и CPU и периферийные устройства, такие как память. Далее, устройство управления торможением работает как блок 110 прогнозирования степени скольжения и блок 120 переключения тормозного устройства, описанные выше, посредством выполнения конкретных программ.
[0039] [Процедура процесса управления торможением]
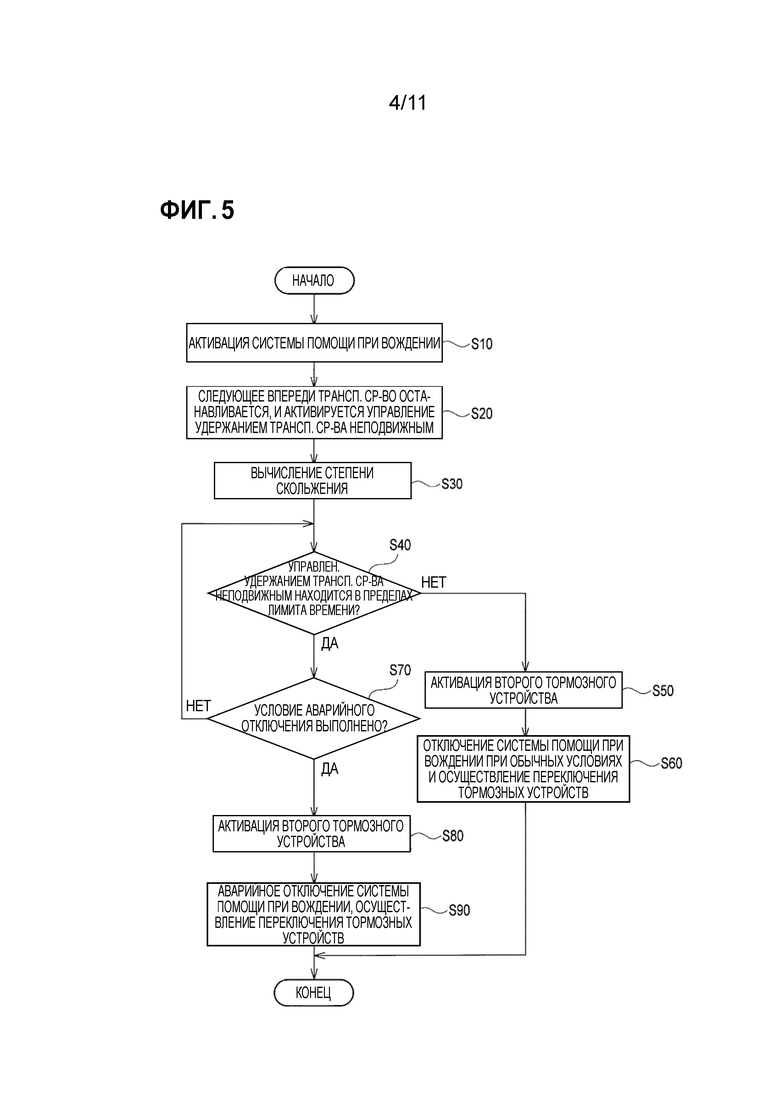
Далее со ссылкой на блок-схему на Фигуре 5 будет описана процедура процесса управления торможением устройством 100 управления торможением в соответствии с первым вариантом выполнения.
[0040] Сначала на этапе S10, когда переключатель установки или переключатель возобновления включается водителем, контроллер 29 помощи при вождении активирует систему помощи при вождении, такую как адаптивная система круиз-контроля, как проиллюстрировано на Фигуре 5. Когда управление приведением в движение активировано, рассматриваемое транспортное средство движется, поддерживая постоянное расстояние между транспортными средствами до следующего впереди транспортного средства путем следующего управления движением.
[0041] На этапе S20, если следующее впереди транспортное средство, за которым следует рассматриваемое транспортное средство, останавливается, устройство 100 управления торможением автоматически управляет основным тормозным устройством 31 и останавливает рассматриваемое транспортное средство в соответствии с командой от контроллера 29 помощи при вождении. В это время рассматриваемое транспортное средство останавливается, поддерживая постоянное расстояние между транспортными средствами относительно следующего впереди транспортного средства. Далее устройство 100 управления торможением активирует управление удержанием транспортного средства неподвижным и помещает рассматриваемое транспортное средство в состояние удержания транспортного средства неподвижным с помощью основного тормозного устройства 31.
[0042] На этапе S30 блок 110 прогнозирования степени скольжения вычисляет степень скольжения. Как описано выше, блок 110 прогнозирования степени скольжения вычисляет прогнозируемую степень коэффициента трения, которая прогнозирует коэффициент трения дороги, по которой движется рассматриваемое транспортное средство, и вычисляет прогнозируемую степень уклона, которая прогнозирует уклон дороги, по которой движется рассматриваемое транспортное средство, используя таблицы, показанные на Фигурах 3 и 4. Далее степень скольжения прогнозируется путем умножения прогнозируемой степени коэффициента трения и прогнозируемой степени уклона.
[0043] На этапе S40 устройство 110 управления торможением определяет, находится ли время с момента активации управления удержанием транспортного средства неподвижным в пределах лимита времени. Лимит времени представляет собой время, которое устанавливается с учетом надежности насоса, который увеличивает гидравлическое давление основного тормозного устройства 31. Далее, если время с момента активации управления удержанием транспортного средства неподвижным не находится в пределах лимита времени, процесс переходит к этапу S50, а если находится в пределах лимита времени, процесс переходит к этапу S70.
[0044] На этапе S50, если время с момента активации управления удержанием транспортного средства неподвижным превышает лимит времени, блок 120 переключения тормозного устройства активирует второе тормозное устройство 33. При обнаружении сигнала переключения, который выводится, если лимит времени превышен, блок 120 переключения тормозного устройства сначала активирует второе тормозное устройство 33, как проиллюстрировано на Фигуре 6. Когда второе тормозное устройство 33 активировано, индикатор, указывающий, что второе тормозное устройство 33 активировано, подсвечивается на дисплее 35.
[0045] На этапе S60, когда второе тормозное устройство 33 активировано, контроллер 29 помощи при вождении отключает систему помощи при вождении при обычных условиях. Наряду с вышеупомянутым, блок 120 переключения тормозного устройства осуществляет переключение с основного тормозного устройства 31 на второе тормозное устройство 33. То есть, когда второе тормозное устройство 33 активировано, блок 120 переключения тормозного устройства отключает автоматическое управление основным тормозным устройством 31 при обычных условиях, которое было ответственно за управление удержанием транспортного средства неподвижным до этого момента, и быстро сбрасывает гидравлическое давление с тормоза, чтобы уменьшить тормозное усилие. В дополнение, при отключении системы помощи при вождении изображение уведомления об отключении отображается на дисплее 35, и звук уведомления об отключении выводится из динамика 37, чтобы уведомить водителя. Когда таким образом основное тормозное устройство 31 переключается на второе тормозное устройство 33, процесс управления торможением согласно настоящему варианту выполнения заканчивается.
[0046] С другой стороны, на этапе S70 контроллер 29 помощи при вождении, определяет, выполнено ли условие аварийного отключения. Контроллер 29 помощи при вождении определяет, что условие аварийного отключения выполнено, если датчик 25 ремня безопасности обнаруживает, что ремень безопасности водителя отстегнут, или, если датчик 27 двери обнаруживает, что дверь со стороны водителя открыта. Если условие аварийного отключения не выполнено, процесс возвращается на этап S40, и, если условие аварийного отключения выполнено, процесс переходит к этапу S80.
[0047] На этапе S80, если обнаружено, что условие аварийного отключения выполнено, блок 120 переключения тормозного устройства активирует второе тормозное устройство 33. При обнаружении сигнала переключения, который выводится, если условие аварийного отключения выполнено, блок 120 переключения тормозного устройства сначала активирует второе тормозное устройство 33, как проиллюстрировано на Фигуре 7. Когда второе тормозное устройство 33 активировано, индикатор, указывающий, что второе тормозное устройство 33 активировано, подсвечивается на дисплее 35.
[0048] На этапе S90, когда второе тормозное устройство 33 активировано, контроллер 29 помощи при вождении немедленно отключает систему помощи при вождении. Наряду с вышеупомянутым, блок 120 переключения тормозного устройства осуществляет переключение с основного тормозного устройства 31 на второе тормозное устройство 33. То есть, когда второе тормозное устройство 33 активировано, блок 120 переключения тормозного устройства немедленно отключает автоматическое управление основным тормозным устройством 31, которое было ответственно за управление удержанием транспортного средства неподвижным до этого момента, и быстро сбрасывает гидравлическое давление с тормоза, чтобы уменьшить тормозное усилие. В это время блок 120 переключения тормозного устройства задерживает момент времени, с которого тормозное усилие основного тормозного устройства 31 падает до или ниже заданного значения, когда степень скольжения, вычисленная на этапе S30, увеличивается.
[0049] Сначала блок 110 прогнозирования степени скольжения классифицирует степень скольжения, вычисленную на этапе S30, на четыре уровня, уровни 1-4, как проиллюстрировано на Фигуре 7(b). Способ классификации заключается в следующем: три пороговых значения устанавливают заранее, и степень скольжения классифицируют как уровень 1, когда она находится ниже самого низкого порогового значения, как уровень 2, когда она находится на уровне или выше самого низкого порогового значения, как уровень 3, когда она находится на уровне или выше промежуточного порогового значения, и как уровень 4, когда она находится на уровне или выше самого высокого порогового значения. То есть уровень 1 представляет собой случай, при котором степень скольжения является небольшой, и вероятность того, что транспортное средство будет скользить, является низкой, а уровень 4 представляет собой случай, при котором степень скольжения является большой, и вероятность того, что транспортное средство будет скользить, является высокой. Однако количество уровней не обязательно ограничено четырьмя и может быть больше или меньше четырех.
[0050] Далее блок 120 переключения тормозного устройства задерживает момент времени, с которого начинается снижение тормозного усилия основного тормозного устройства 31, в соответствии с классифицированными уровнями, как проиллюстрировано на Фигуре 7(а). Например, в случае уровня 1, моментом времени, с которого начинается снижение тормозного усилия, будет W, который является таким же, как в нормальном состоянии, но, когда степень скольжения увеличивается и достигает уровня 2, момент времени, с которого начинается снижение тормозного усилия, задерживается до X. Далее, когда степень скольжения увеличивается дальше до уровней 3 и 4, момент времени, с которого начинается снижение тормозного усилия, задерживается дальше от Y до Z. Задерживая момент времени, с которого начинается снижение тормозного усилия основного тормозного устройства 31, таким образом, момент времени, с которого тормозное усилие основного тормозного устройства 31 падает до или ниже заданного значения, задерживается. Это заданное значение представляет собой значение тормозного усилия основного тормозного устройства 31, когда рассматриваемое транспортное средство начинает скользить из-за уменьшения тормозного усилия, которое может быть получено заранее путем эксперимента или моделирования или устанавливается в каждом конкретном случае в соответствии со степенью скольжения. Поскольку момент времени, с которого тормозное усилие основного тормозного устройства 31 уменьшается, задерживается таким образом, возможно обеспечивать, что у водителя будет достаточно времени для приведения в действие основного тормозного устройства, даже если рассматриваемое транспортное средство начинает скользить из-за переключения с основного тормозного устройства 31 на второе тормозное устройство 33 на дороге с низким коэффициентом трения или на дороге с крутым уклоном.
[0051] Дополнительно, блок 120 переключения тормозного устройства может установить верхнее предельное значение для времени, пока тормозное усилие основного тормозного устройства 31 не упадет до уровня или ниже заданного значения, и это верхнее предельное значение может быть изменено в зависимости от степени скольжения. Верхнее предельное значение устанавливается для времени уменьшения тормозного усилия для каждого уровня, соответствующего степени скольжения, как проиллюстрировано на Фигуре 8(b). Далее блок 120 переключения тормозного устройства уменьшает тормозное усилие основного тормозного устройства 31 так, чтобы не превышать эти верхние предельные значения, как проиллюстрировано на Фигуре 8(а). Например, тормозное усилие основного тормозного устройства 31 уменьшается так, чтобы не превышать верхнее предельное значение W в случае уровня 1, и тормозное усилие основного тормозного устройства 31 уменьшается так, чтобы не превышать верхние предельные значения X, Y и Z в случаях уровней 2-4 соответственно. Обеспечивая верхние предельные значения таким образом, возможно предотвратить длительное использование основного тормозного устройства 31, чтобы уменьшить количество отказов основного тормозного устройства 31.
[0052] Во время аварийного отключения системы помощи при вождении изображение уведомления об отключении отображается на дисплее 35, и звук уведомления об отключении выводится из динамика 37, чтобы уведомить водителя. Когда таким образом основное тормозное устройство 31 переключается на второе тормозное устройство 33, процесс управления торможением согласно настоящему варианту выполнения заканчивается.
[0053] [Модифицированный пример 1]
В модифицированном примере 1 момент времени, с которого тормозное усилие основного тормозного устройства 31 падает до или ниже заданного значения, задерживается, уменьшая скорость, с которой уменьшается тормозное усилие основного тормозного устройства 31, как проиллюстрировано на Фигуре 9(а). Например, в случае уровня 1, скоростью, с которой тормозное усилие уменьшается, будет W, которая является такой же, как в нормальном состоянии, но, когда степень скольжения увеличивается и становится соответствующей уровню 2, скорость, с которой тормозное усилие уменьшается, уменьшается до X. Далее, когда степень скольжения увеличивается дальше до уровней 3 и 4, скорость, с которой тормозное усилие уменьшается, уменьшается дальше от Y до Z. Уменьшая скорость, с которой тормозное усилие основного тормозного устройства 31 уменьшается, таким образом, момент времени, с которого тормозное усилие основного тормозного устройства 31 падает до или ниже заданного значения, задерживается.
[0054] [Модифицированный пример 2]
В модифицированном примере 2 момент времени, с которого тормозное усилие основного тормозного устройства 31 падает до или ниже заданного значения, задерживается, уменьшая тормозное усилие основного тормозного устройства 31 ступенчатым образом, как проиллюстрировано на Фигуре 10(а). Например, в случае уровня 1, тормозное усилие уменьшается только однажды ступенчатым образом, как обозначено W, но, когда степень скольжения увеличивается и становится соответствующей уровню 2, тормозное усилие уменьшается дважды ступенчатым образом, как обозначено X. Далее, когда степень скольжения увеличивается дальше до уровней 3 и 4, тормозное усилие уменьшается три раза и четыре раза, как обозначено Y и Z соответственно. Таким образом, уменьшая тормозное усилие основного тормозного устройства 31 ступенчатым образом, момент времени, с которого тормозное усилие основного тормозного устройства 31 падает до или ниже заданного значения, задерживается.
[0055] [Эффекты первого варианта выполнения]
Как подробно описано выше, в устройстве 100 управления торможением согласно настоящему варианту выполнения при переключении с основного тормозного устройства 31 на второе тормозное устройство 33 момент времени, с которого тормозное усилие основного тормозного устройства 31 падает до или ниже заданного значения, задерживается, когда степень скольжения увеличивается. Соответственно, возможно обеспечивать, что у водителя будет достаточно времени для приведения в действие основного тормозного устройства, даже если рассматриваемое транспортное средство начинает скользить из-за переключения с основного тормозного устройства 31 на второе тормозное устройство 33 на поверхности дороги с низким коэффициентом трения или на дороге с крутым уклоном.
[0056] В дополнение, в устройстве 100 управления торможением согласно настоящему варианту выполнения момент времени, с которого тормозное усилие основного тормозного устройства 31 падает до или ниже заданного значения, задерживается, задерживая момент времени, с которого начинается снижение тормозного усилия основного тормозного устройства 31. Поскольку при этом необязательно изменять скорость, с которой давление тормозной жидкости основного тормозного устройства 31 сбрасывается, нет необходимости в устранении проблемы регулировки давления тормозной жидкости, и момент времени, с которого тормозное усилие основного тормозного устройства 31 уменьшается, может быть легко задержано.
[0057] Более того, в устройстве 100 управления торможением согласно настоящему варианту выполнения момент времени, с которого тормозное усилие основного тормозного устройства 31 падает до или ниже заданного значения, задерживается путем уменьшения скорости, с которой тормозное усилие основного тормозного устройства 31 уменьшается. Поскольку тормозное усилие основного тормозного устройства 31, таким образом, постепенно уменьшается, водитель способен уловить уменьшение тормозного усилия и легко управлять основным тормозным устройством 31.
[0058] Дополнительно, в устройстве 100 управления торможением согласно настоящему варианту выполнения момент времени, с которого тормозное усилие основного тормозного устройства 31 падает до или ниже заданного значения, задерживается путем уменьшения тормозного усилия основного тормозного устройства 31 ступенчатым образом. Поскольку тормозное усилие основного тормозного устройства 31, таким образом, уменьшается ступенчатым образом, водитель способен установить уменьшение тормозного усилия и легко управлять основным тормозным устройством 31.
[0059] Более того, в устройстве 100 управления торможением согласно настоящему варианту выполнения верхнее предельное значение устанавливается для времени, пока тормозное усилие основного тормозного устройства 31 не упадет до или ниже заданного значения, и это верхнее предельное значение изменяется в соответствии со степенью скольжения. Таким образом, возможно предотвратить длительное использование основного тормозного устройства 31, чтобы уменьшить количество отказов основного тормозного устройства 31.
[0060] Дополнительно, в устройстве 100 управления торможением согласно настоящему варианту выполнения степень скольжения прогнозируется на основе коэффициента трения дороги, по которой движется рассматриваемое транспортное средство. Таким образом, возможно надежно прогнозировать, что рассматриваемое транспортное средство будет скользить и начнет движение при переключении с основного тормозного устройства 31 на второе тормозное устройство 33 на поверхности дороги с низким коэффициентом трения.
[0061] Более того, в устройстве 100 управления торможением согласно настоящему варианту выполнения степень скольжения прогнозируется на основе уклона дороги, по которой движется рассматриваемое транспортное средство. Таким образом, возможно надежно прогнозировать, что рассматриваемое транспортное средство будет скользить и начнет движение при переключении с основного тормозного устройства 31 на второе тормозное устройство 33 на дороге с крутым уклоном.
[0062] [Второй вариант выполнения]
Далее со ссылкой на чертежи будет описано устройство управления торможением согласно второму варианту выполнения настоящего изобретения. Поскольку конфигурация системы управления торможением согласно настоящему варианту выполнения является такой же, как в первом варианте выполнения, ее подробное описание опущено.
[0063] [Процедура процесса управления торможением]
Настоящий вариант выполнения отличается от первого варианта выполнения тем, что процесс управления торможением применяется к системе экстренного торможения. Система экстренного торможения приводит в действие основное тормозное устройство 31 и останавливает рассматриваемое транспортное средство, когда контроллер 29 помощи при вождении определяет вероятность столкновения со следующим впереди транспортным средством на основе расстояния между транспортными средствами относительно следующего впереди транспортного средства, измеряемого с помощью передней камеры 9, и определяет, что вероятность столкновения является высокой. Контроллер 29 помощи при вождении выполняет управление удержанием транспортного средства неподвижным после остановки рассматриваемого транспортного средства и, когда заданное время истекает, выдает команду на активацию второго тормозного устройства 33 и отключение основного тормозного устройства 31.
[0064] На этапе S110 контроллер 29 помощи при вождении определяет расстояние между транспортными средствами и скорость относительно следующего впереди транспортного средства на основе информации от передней камеры 9 и переднего радара 19 и определяет вероятность столкновения, как проиллюстрировано на Фигуре 11. Здесь, если вероятность столкновения является низкой, определение вероятности столкновения продолжается на этапе S110, и, если вероятность столкновения является высокой, процесс переходит к этапу S120.
[0065] На этапе S120, если команда на активацию системы экстренного торможения дана контроллером 29 помощи при вождении, контроллер 100 управления тормозом автоматически управляет основным тормозным устройством 31 для выполнения замедления до тех пор, пока рассматриваемое транспортное средство не остановится. Далее, когда рассматриваемое транспортное средство останавливается, устройство 100 управления торможением активирует управление удержанием транспортного средства неподвижным и помещает рассматриваемое транспортное средство в состояние удержания транспортного средства неподвижным с помощью основного тормозного устройства 31.
[0066] Ниже в процессе с этапа S130 до этапа S190 выполняется тот же процесс с этапа S30 до этапа S90 первого варианта выполнения, проиллюстрированного на Фигуре 5. Далее, когда система экстренного торможения отключается при обычных условиях на этапе S160, или, когда система экстренного торможения немедленно отключается, а основное тормозное устройство 31 переключается на второе тормозное устройство 33 на этапе S190, процесс управления торможением согласно настоящему варианту выполнения заканчивается.
[0067] [Эффекты второго варианта выполнения]
Как подробно описано выше, в устройстве 100 управления торможением согласно настоящему варианту выполнения при переключении с основного тормозного устройства 31 на второе тормозное устройство 33 момент времени, с которого тормозное усилие основного тормозного устройства 31 уменьшается, задерживается в соответствии со степенью скольжения, даже когда активирована система экстренного торможения. Соответственно, возможно обеспечивать, что у водителя будет достаточно времени для приведения в действие основного тормозного устройства, даже если рассматриваемое транспортное средство начинает скользить из-за переключения с основного тормозного устройства 31 на второе тормозное устройство 33 на поверхности дороги с низким коэффициентом трения или на дороге с крутым уклоном.
[0068] [Третий вариант выполнения]
Далее со ссылкой на чертежи будет описано устройство управления торможением в соответствии с третьим вариантом выполнения настоящего изобретения. Поскольку конфигурация системы управления торможением согласно настоящему варианту выполнения является такой же, как в первом варианте выполнения, ее подробное описание опущено.
[0069] [Процедура процесса управления торможением]
Настоящий вариант выполнения отличается от первого варианта выполнения тем, что процесс управления торможением применяется к тормозу с автоматическим удержанием. Тормоз с автоматическим удержанием приводит в действие основное тормозное устройство 31 для выполнения управления удержанием транспортного средства неподвижным, даже если водитель не нажимает на педаль тормоза постоянно, когда система помощи при вождении не активирована, и транспортное средство останавливается посредством операции ускорения/замедления, выполняемой водителем. Когда педаль газа нажимается, в то время как транспортное средство остановлено и удерживается неподвижным, управление удержанием транспортного средства неподвижным отключается, и рассматриваемое транспортное средство начинает движение.
[0070] На этапе S210 контроллер 29 помощи при вождении определяет, нажимает ли водитель педаль тормоза, в то время как рассматриваемое транспортное средство находится в неподвижном состоянии, основываясь на информации от датчика 21 скорости транспортного средства и переключателя 23 педали тормоза, как проиллюстрировано на Фигуре 12. Здесь, если водитель не нажимает на педаль тормоза, на этапе S210 продолжается определение состояния тормоза, и, если водитель нажимает на педаль тормоза, процесс переходит к этапу S220.
[0071] На этапе S220, если команда на активацию тормоза с автоматическим удержанием дается контроллером 29 помощи при вождении, контроллер 100 управления тормозом автоматически управляет основным тормозным устройством 31 с заданным давлением тормозной жидкости для выполнения управления удержанием транспортного средства неподвижным и помещает рассматриваемое транспортное средство в состояние удержания транспортного средства неподвижным.
[0072] Ниже при процессе с этапа S230 до этапа S290 выполняется тот же процесс с этапа S30 до этапа S90 первого варианта выполнения, проиллюстрированного на Фигуре 5. Далее, когда тормоз с автоматическим удержанием отключается при обычных условиях на этапе S260, или, когда тормоз с автоматическим удержанием немедленно отключается, и основное тормозное устройство 31 переключается на второе тормозное устройство 33 на этапе S290, процесс управления торможением согласно настоящему варианту выполнения заканчивается.
[0073] [Эффекты третьего варианта выполнения]
Как подробно описано выше, в устройстве 100 управления торможением согласно настоящему варианту выполнения при переключении с основного тормозного устройства 31 на второе тормозное устройство 33 момент времени, с которого тормозное усилие основного тормозного устройства 31 уменьшается, задерживается в соответствии со степенью скольжения, даже когда активирован тормоз с автоматическим удержанием. Соответственно, возможно, что у водителя будет достаточно времени для приведения в действие основного тормозного устройства 31, даже если рассматриваемое транспортное средство начинает скользить из-за переключения с основного тормозного устройства 31 на второе тормозное устройство 33 на поверхности дороги с низким коэффициентом трения или на дороге с крутым уклоном.
[0074] Вышеописанные варианты выполнения представляют собой примеры настоящего изобретения. Соответственно, настоящее изобретение не ограничивается вариантами выполнения, описанными выше, и различные изменения могут быть выполнены в других формах, кроме указанных в вышеупомянутых вариантах выполнения, поскольку такие изменения не выходят за рамки технического объема охраны настоящего изобретения.
Описания ссылочных позиций
[0075] 1 Система управления торможением
3 Контроллер приведения в движение транспортного средства
5 Контроллер двигателя
7 Переключатель работы стеклоочистителей
9 Передняя камера
11 Блок связи
13 Приемник GPS
15 Датчик ускорения
17 Навигационное устройство
19 Передний радар
21 Датчик скорости транспортного средства
23 Переключатель педали тормоза
25 Датчик ремня безопасности
27 Датчик двери
29 Контроллер помощи при вождении
31 Основное тормозное устройство
33 Второе тормозное устройство
35 Дисплей
37 Динамик
100 Устройство управления торможением
110 Блок прогнозирования степени скольжения
120 Блок переключения тормозного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ СИЛОВЫМ АГРЕГАТОМ НА ОСНОВАНИИ СНИЖЕНИЯ ЭФФЕКТИВНОСТИ ТОРМОЖЕНИЯ И ТОРМОЗНОЙ СПОСОБНОСТИ | 2017 |
|
RU2688567C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2631150C1 |
| Система экстренного торможения для беспилотных автомобилей с электроприводом | 2019 |
|
RU2735186C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ, СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ И ЭНЕРГОНЕЗАВИСИМЫЙ НОСИТЕЛЬ ДАННЫХ | 2020 |
|
RU2749742C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЖДЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЖДЕНИЕМ | 2017 |
|
RU2727907C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЗОЙ ПАССАЖИРА И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЗОЙ ПАССАЖИРА | 2018 |
|
RU2758170C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2673581C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ДЛЯ ЭЛЕКТРОТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2724569C2 |
| СИСТЕМА АВТОНОМНОГО ВОЖДЕНИЯ (ВАРИАНТЫ) | 2018 |
|
RU2707855C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2020 |
|
RU2740820C1 |
Предложено устройство управления торможением для автоматического управления рабочим тормозом и стояночным тормозом транспортного средства. Устройство содержит блок (110) прогнозирования скольжения, который прогнозирует вероятность того, что рассматриваемое транспортное средство будет скользить, и блок (120) переключения тормозного устройства, который осуществляет переключение с рабочего тормоза (31) на стояночный тормоз (33), когда рассматриваемое транспортное средство находится в состоянии удержания транспортного средства неподвижным с помощью рабочего тормоза (31). Блок (120) переключения тормозного устройства задерживает момент времени, с которого начинается уменьшение тормозного усилия рабочего тормоза (31), если блок (110) прогнозирования скольжения прогнозирует скольжение при переключении с рабочего тормоза (31) на стояночный тормоз (33). Предложен также способ управления торможением. Достигается повышение безопасности. 2 н. и 6 з.п. ф-лы, 12 ил.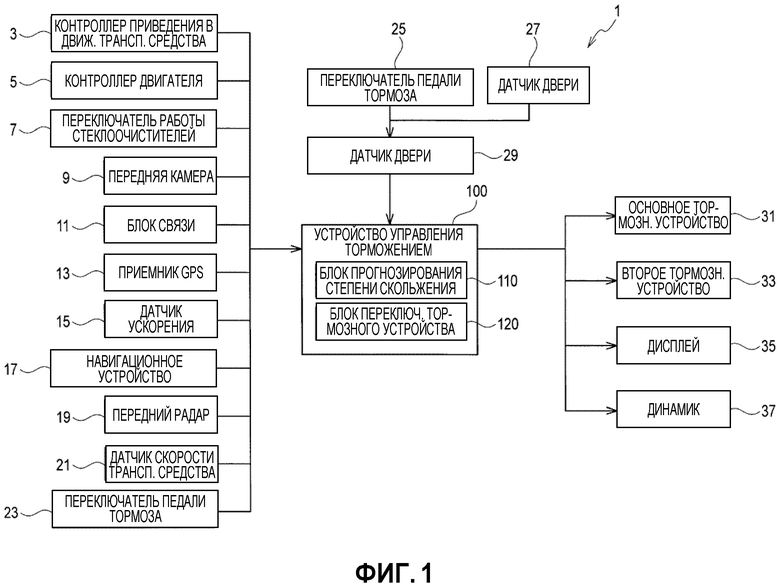
1. Устройство управления торможением для автоматического управления основным тормозным устройством, обычно используемым для торможения рассматриваемого транспортного средства при движении, и вторым тормозным устройством, используемым для поддержания рассматриваемого транспортного средства в неподвижном состоянии, содержащее:
блок прогнозирования скольжения, который прогнозирует вероятность того, что рассматриваемое транспортное средство будет скользить, и
блок переключения тормозного устройства, который осуществляет переключение с основного тормозного устройства на второе тормозное устройство, когда рассматриваемое транспортное средство находится в состоянии удержания транспортного средства неподвижным с помощью основного тормозного устройства, причем
блок переключения тормозного устройства задерживает момент времени, с которого начинается уменьшение тормозного усилия основного тормозного устройства, если блок прогнозирования скольжения прогнозирует скольжение при переключении с основного тормозного устройства на второе тормозное устройство.
2. Устройство управления торможением по п. 1, в котором
блок прогнозирования скольжения прогнозирует вероятность того, что рассматриваемое транспортное средство будет скользить, на основе степени скольжения, и
блок переключения тормозного устройства задерживает момент времени, с которого тормозное усилие основного тормозного устройства падает до или ниже заданного значения, когда степень скольжения увеличивается.
3. Устройство управления торможением по п. 2, в котором блок переключения тормозного устройства задерживает момент времени, с которого тормозное усилие основного тормозного устройства падает до или ниже заданного значения, уменьшая скорость, с которой тормозное усилие основного тормозного устройства уменьшается.
4. Устройство управления торможением по п. 2, в котором блок переключения тормозного устройства задерживает момент времени, с которого тормозное усилие основного тормозного устройства падает до или ниже заданного значения, уменьшая тормозное усилие основного тормозного устройства ступенчатым образом.
5. Устройство управления торможением по любому из пп. 2-4, в котором блок переключения тормозного устройства устанавливает верхнее предельное значение для времени, пока тормозное усилие основного тормозного устройства не упадет до или ниже заданного значения, и верхнее предельное значение изменяется в соответствии со степенью скольжения.
6. Устройство управления торможением по любому из пп. 2-5, в котором блок прогнозирования степени скольжения прогнозирует степень скольжения на основе коэффициента трения дороги, по которой движется рассматриваемое транспортное средство, и прогнозирует степень скольжения, основываясь по меньшей мере на одном из истории работы системы, которая управляет вождением или торможением рассматриваемого транспортного средства, режима движения рассматриваемого транспортного средства, рабочего состояния стеклоочистителя рассматриваемого транспортного средства, дорожного знака вблизи от рассматриваемого транспортного средства, информации об окружающей дорожной среде вокруг рассматриваемого транспортного средства, текущей даты и времени и информации о положении рассматриваемого транспортного средства.
7. Устройство управления торможением по любому из пп. 2-6, в котором блок прогнозирования степени скольжения прогнозирует степень скольжения на основе уклона дороги, по которой движется рассматриваемое транспортное средство, и прогнозирует степень скольжения, основываясь по меньшей мере на одном из выходного сигнала датчика ускорения рассматриваемого транспортного средства, информации о высоте рассматриваемого транспортного средства над уровнем моря, картографической информации вокруг рассматриваемого транспортного средства и дорожного знака вблизи рассматриваемого транспортного средства.
8. Способ управления торможением устройства управления торможением для автоматического управления основным тормозным устройством, обычно используемым для торможения рассматриваемого транспортного средства при движении, и вторым тормозным устройством, используемым для поддержания рассматриваемого транспортного средства в неподвижном состоянии, содержащий этапы, на которых:
с помощью устройства управления торможением
прогнозируют вероятность того, что рассматриваемое транспортное средство будет скользить,
осуществляют переключение с основного тормозного устройства на второе тормозное устройство, когда рассматриваемое транспортное средство находится в состоянии удержания транспортного средства неподвижным с помощью основного тормозного устройства, и
осуществляют задержку момента времени, с которого начинается уменьшение тормозного усилия основного тормозного устройства, если прогнозируется скольжение при переключении с основного тормозного устройства на второе тормозное устройство.
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| ТОРМОЗНОЕ УСТРОЙСТВО С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ ДЛЯ ТРАКТОРОВ | 2009 |
|
RU2502622C2 |

