Изобретение относится к регулируемому штативу для оптического прибора, предназначенного для наблюдения, в частности, для операционного микроскопа, содержащему ось наклона и ось поворота для оптического прибора для наблюдения и фланец для соединения с оптическим прибором для наблюдения.
Известно, что для деликатного и точного движения операционного микроскопа, у которого изменяются вращающие моменты, например, вследствие добавления опционального устройства, появляется необходимость в уравновешивании вращающего момента. Были сделаны попытки с помощью дорогостоящих систем уравновешивать каждую из осей вращения, как это показано, например, в документе JP 9182759 А. Там уравновешивание, частично также в автоматическом режиме, производится посредством перемещения весов. Недостатком является то, что эта аппаратура очень дорога и поэтому может использоваться только для систем Hi-End класса.
Аналогичным образом эту ситуацию можно оценить в следующих решениях, известных из уровня техники согласно патентным документам JP 8266555 A, JP 6269463 А и ЕР 0656194 А1.
Известны менее дорогостоящие устройства для компенсации вращающего момента, которые размещены непосредственно на операционном микроскопе, а не на его носителе, например, из патентных документов DE 4231516 А1, ЕР 1312850 А2 или JP 2009201995 А.
В DE 4231516 А1 уравновешивание вращающего момента по одной или по нескольким осям производится посредством регулируемой вручную пружины. Это устройство может использоваться только при небольших изменениях вращающего момента, и систему приходится подстраивать вручную в зависимости от положения оси. У современных микроскопов появляется все больше и больше принадлежностей. Чтобы компенсировать связанный с этим дополнительный вращающий момент, размер названной здесь системы пришлось бы увеличивать настолько, что ее применение стало бы практически невозможным.
Другой путь используется в ЕР 1312850 А2. Здесь при помощи пневматической пружины и преобразователя, который преобразует линейное давление пневматической пружины или упругих элементов в противодействующий момент для уравновешивания вращающего момента микроскопа. Недостаток этого устройства состоит в необходимом для него размере конструкции, а также в отсутствии возможности автоматической или полуавтоматической регулировки уравновешивания вращающего момента.
JP 2009201995 А описывает еще один путь. Здесь микроскоп перемещают вручную при помощи двух линейных приводных механизмов в направлениях осей X и Y относительно подвеса на носителе до тех пор, пока не происходит уравновешивание вращающего момента. Большой недостаток этого изобретения состоит в том, что в результате этого микроскоп в общем случае смещается от центра, и при вращательных перемещениях фокусная точка микроскопа все больше и больше отклоняется. Кроме того, с этим устройством уже принципиально невозможно автоматическое или полуавтоматическое уравновешивание момента.
Поэтому в основе настоящего изобретения лежит задача создать такое простое и экономичное решение проблемы уравновешивания вращающего момента для оптического прибора для наблюдения, в частности, операционного микроскопа, которое, несмотря на широкий диапазон значений уравновешиваемых вращающих моментов, вызванный все большим и большим количеством принадлежностей, занимает незначительное монтажное пространство.
Указанная задача решена предметом изобретения с признаками пункта 1 формулы изобретения. При помощи двух датчиков в первом блоке управления может производиться автоматическое определение компенсируемого вращающего момента. Поскольку первая пружина соединена с первым двигателем, натяжение первой пружины не требуется устанавливать вручную, что значительно облегчает работу оператора. Автоматическая регулировка противодействующего вращающего момента в первой пружине, который может определяться посредством соответствующего алгоритма в блоке управления, может происходить за счет углового поворота первой пружины двигателем. При этом управление двигателем осуществляется блоком управления на основании результата оценки данных обоих датчиков. Первый тормоз служит для того, чтобы фиксировать устройство в выбранном положении, чтобы даже в случае, если уравновешивание вращающего момента не произошло, оператор был свободен, и не происходило непреднамеренного перемещения операционного микроскопа. Передача противодействующего вращающего момента, созданного в первой пружине, на первую ось, относительно которой воздействует вращающий момент, происходит посредством первого устройства передачи вращающего момента. Вследствие того, что первый компенсатор вращающего момента расположен на первой оси, получают очень компактную, экономящую пространство конструкцию.
Предпочтительный вариант усовершенствования изобретения предусматривает, что на второй оси расположен второй компенсатор вращающего момента, который имеет по существу те же самые конструктивные элементы, что и первый компенсатор вращающего момента. Это приводит также по отношению ко второй оси к преимуществам, изложенным в предшествующем абзаце. Благодаря тому, что на каждой из обеих осей расположен компенсатор вращающего момента, оператор пользуется вышеназванными преимуществами при каждом возможном изменении оптического прибора для наблюдения.
Следующий предпочтительный вариант усовершенствования изобретения предусматривает, что ось наклона расположена по существу перпендикулярно оси поворота. Поскольку это является нормальным положением обеих указанных осей в стандартных штативах, на них возможно использование устройства согласно настоящему изобретению
Следующий предпочтительный вариант усовершенствования изобретения предусматривает, что первое устройство передачи вращающего момента и/или второе устройство передачи вращающего момента имеет передаточное число, которое отличается от величины 1:1, в частности, находится между величинами 1:1,5 и 1:4, предпочтительно составляет величину 1:3. В результате этого противодействующие вращающие моменты в пружине, необходимые, например, вследствие массивных, в некоторых случаях, расположенных относительно далеко от соответствующей оси принадлежностей, могут оставаться незначительными, что в свою очередь приводит к компактной конструкции за счет уменьшенного размера первой пружины и первого тормоза.
Следующий предпочтительный вариант усовершенствования изобретения предусматривает, что первый тормоз соединен с первым блоком управления торможением и/или второй тормоз соединен со вторым блоком управления торможением. Вследствие этого возможно достижение полуавтоматического или полностью автоматизированного уравновешивания устройства, так как тормоз автоматически открывается только на период времени, в который производится уравновешивание вращающего момента, воздействующего относительно соответствующей оси.
Следующий предпочтительный вариант усовершенствования изобретения предусматривает, что первый блок управления двигателем и/или второй блок управления двигателем и/или первый блок управления торможением и/или второй блок управления торможением содержатся в электронно-вычислительной машине в виде программного обеспечения. Тем самым обеспечена компактность устройства, и все необходимые управляющие воздействия могут быть собраны в единственном устройстве.
Следующий предпочтительный вариант усовершенствования изобретения предусматривает, что ось первого тормоза и ось первой пружины совпадают, и/или ось второго тормоза и ось второй пружины совпадают. Вследствие этого достигается компактная конструкция и обеспечивается оптимальная передача усилий от каждого из двигателей на соответствующую пружину.
Следующий предпочтительный вариант усовершенствования изобретения предусматривает, что первый тормоз и/или второй тормоз представляет собой электромагнитный тормоз. Такие тормоза легко управляемы, имеют компактную конструкцию, и их использование как стандартных деталей недорого.
Следующий предпочтительный вариант усовершенствования изобретения предусматривает, что на фланце размещен операционный микроскоп или дополнительный элемент штатива. Это представляет собой основной случай применения штатива согласно изобретению, так что оператор операционного микроскопа пользуется всеми вышеуказанными преимуществами. Изобретением предусматривается, что вместо показанного в варианте осуществления фланца для подключения операционного микроскопа возможно присоединение другого элемента регулируемого штатива.
Следующий предпочтительный вариант усовершенствования изобретения предусматривает, что регулируемый штатив представляет собой составную часть потолочного штатива, настенного штатива или напольного штатива. Вследствие этого имеется возможность использования стандартных потолочных, настенных или напольных штативов, на оси наклона и/или на оси поворота которых могут быть размещены составные части согласно изобретению или которые можно соответствующим образом дооборудовать. Это означает, что нет необходимости предусматривать дорогостоящие дополнительные детали, известные из уровня техники, для так или иначе необходимого потолочного, настенного или напольного штатива. Это способствует большей компактности конструкции устройства в целом и дополнительно снижает издержки по сравнению с дорогостоящей дополнительной деталью.
Дальнейшие преимущества и подробности изобретения разъясняются на основе примера варианта осуществления, представленного на фигуре.
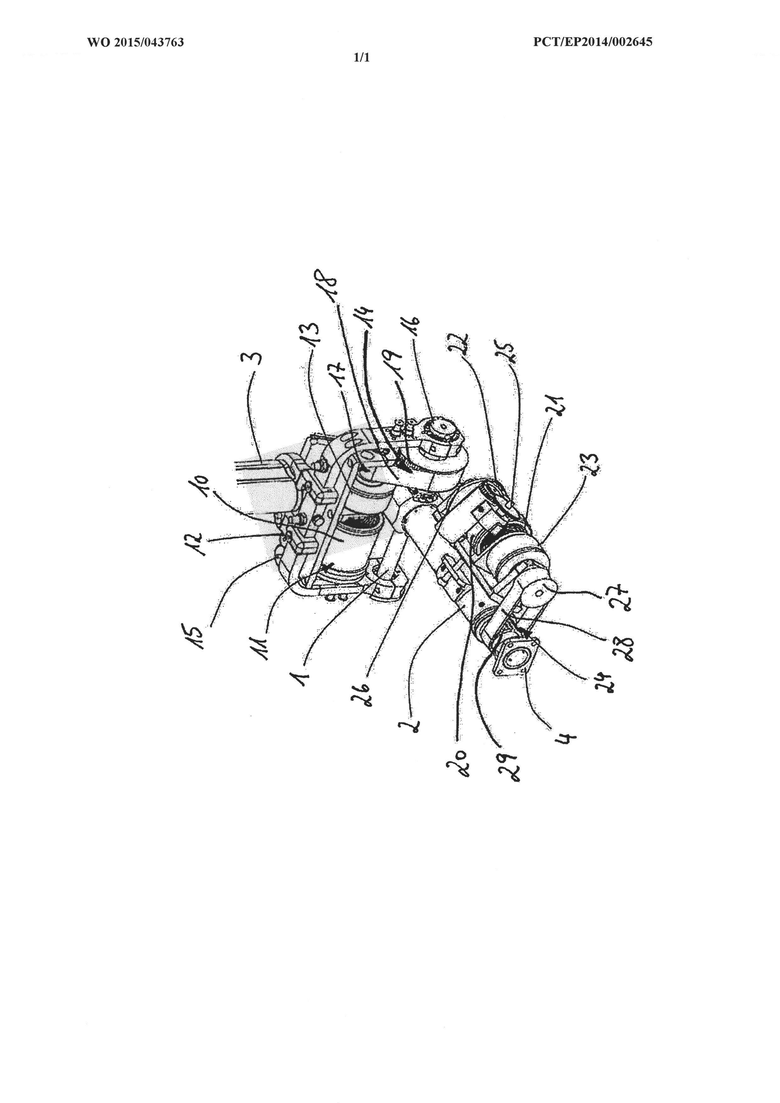
Единственная фигура показывает фрагмент варианта осуществления регулируемого штатива согласно изобретению.
На фигуре показан вариант осуществления предмета изобретения в виде части потолочного штатива для операционного микроскопа. Здесь потолочный штатив представлен только его присоединительной деталью 3; однако специалистам он хорошо известен, так что в данном случае можно отказаться от более подробного изложения, в частности, принимая во внимание то, что исполнение остальной части потолочного штатива не имеет значения для изобретения. Другие виды штативов, такие, как настенный или напольный штативы, точно так же могут использоваться в рамках изобретения.
На конце присоединительной детали 3 выполнены две оси, ось 1 наклона и ось 2 поворота. На свободном конце оси 2 поворота выполнен фланец 4, на котором возможно размещение операционного микроскопа (не показан) или дополнительного элемента потолочного штатива. На фланец 4 можно помещать любой операционный микроскоп; это относится также к устанавливаемым на операционный микроскоп принадлежностям. При этом операционный микроскоп не обязательно должен присоединяться непосредственно к фланцу 4, между фланцем 4 и операционным микроскопом может располагаться также дополнительный элемент или несколько элементов потолочного штатива.
На фигуре ось 1 наклона проходит горизонтально; горизонтально проходит также ось 2 поворота, расположенная перпендикулярно к ней. Во время операции оператор, который обслуживает операционный микроскоп, как правило, должен приводить его в различные положения. Так как центр тяжести операционного микроскопа с принадлежностями как правило не находится на оси 2 поворота и в любом случае не лежит на оси 1 наклона, имеют место вращающие моменты относительно обеих этих осей 1, 2. Чтобы операционный микроскоп вместе с его принадлежностями не поворачивался вокруг соответствующей оси 1, 2 до тех пор, пока его центр тяжести не окажется по вертикали под соответствующей осью 1, 2, необходимо прикладывать на каждой из осей 1, 2 противодействующий вращающий момент, который уравновешивает соответствующий вращающий момент с учетом положения и массы операционного микроскопа вместе с принадлежностями.
Сначала описывается принцип действия устройства согласно изобретению для оси 1 наклона. На основании положения центра масс операционного микроскопа вместе с принадлежностями и дополнительными элементами, которые относятся к оси 2 поворота, относительно оси 1 наклона приложен вращающий момент, который действует против часовой стрелки, если на фигуре смотреть на ось 1 наклона с правой стороны. Этот вращающий момент вызвал бы поворот операционного микроскопа вместе с принадлежностями и осью 2 поворота вокруг оси 1 наклона против часовой стрелки до тех пор, пока центр тяжести системы, состоящей из операционного микроскопа, принадлежностей и оси 2 поворота, не пришел бы в положение по вертикали непосредственно под осью 1 наклона. Однако, поскольку оператору, чтобы иметь возможность работать, постоянно требуется другое положение операционного микроскопа, должен быть приложен соответствующий противодействующий вращающий момент - по часовой стрелке, если смотреть на ось 1 наклона справа - относительно оси 1 наклона. Это достигается посредством того, что первый компенсатор вращающего момента размещен непосредственно на оси 1 наклона.
Этот первый компенсатор вращающего момента имеет следующие существенные для изобретения составные части: первую пружину 11, первый двигатель 12, первый тормоз 13, первое устройство 14 передачи вращающего момента, первый датчик 15 усилия и первый датчик 16 местоположения. Дальнейшие составные части, представленные на фигуре, несущественны для существа изобретения, и специалисту известно, как их сконструировать в свете нижеследующего описания в отношении существенных для изобретения частей, их взаимодействия и их взаимного расположения.
Первый датчик 16 расположен на оси 1 наклона на ее правом конце. Он измеряет местоположение и угловое положение оси 1 наклона в пространстве. Соответствующее мгновенное значение переносится на компьютер (не показан). Для передачи обычно используется кабель данных (не показан). Тем не менее, может производиться также беспроводная передача этих данных на электронно-вычислительную машину. Когда вращающий момент действует относительно оси 1 наклона, и первый тормоз 13 открыт, положение оси 1 наклона в пространстве, по меньшей мере, ее угловое положение, изменяется. Исходя из данных об изменении положения оси 1 наклона во времени после открытия первого тормоза 13, которые получаются посредством переданных данных от первого датчика 16 местоположения, на основании известной специалисту физической формулы - если он знает прочие параметры системы в целом - возможно сделать вывод о величине воздействующего вращающего момента. Это производится на электронно-вычислительной машине посредством подходящего алгоритма. Соответствующий вращающий момент компенсируется первым устройством 14 передачи вращающего момента. Для этого оно имеет первую пружину 11. При этом в данном варианте осуществления идет речь о спиральной пружине, которая закреплена одним концом на первом корпусе 10, а другим концом - на не показанном первом центральном валу. Первый двигатель 12 соединен посредством соответствующего устройства передачи усилия, например, зубчатого колеса, с первой пружиной 11, так что ее первый корпус 10 может вращаться относительно первого центрального вала. Об устройствах передачи усилия ниже еще последуют более подробные пояснения.
Напряжение первой пружины 11 и, таким образом, сила, воздействующая через нее на ее первый центральный вал, измеряется посредством первого датчика 15 усилия. Первый датчик 15 усилия при этом фиксирует угловое положение первого центрального вала относительно первого корпуса 10 первой пружины 11, и на основании угла поворота первого корпуса 10, приводимого в движение первым двигателем 12, относительно первого центрального вала получается сила натяжения первой пружины 11. Значение углового положения передается на электронно-вычислительную машину. Здесь также обычно используется кабель данных (не показан), однако может производиться и беспроводная передача. Если параметры первой пружины 11 известны, на основании углового положения первого центрального вала по отношению к первому корпусу 10 первой пружины 11 может делаться вывод о значении силы, имеющей место в этом положении. Это происходит в электронно-вычислительной машине посредством соответствующего алгоритма; он описывается физической формулой, которая известна специалисту. В альтернативном варианте первый двигатель 12 может также поворачивать первый центральный вал, чтобы изменять противодействующий вращающий момент; в этом случае первый датчик 15 усилия также фиксировал бы угловое положение первого центрального вала относительно первого корпуса 10, однако в этом случае первый двигатель 12 активно вращал бы первый центральный вал, а не первый корпус 10.
Для уравновешивания вращающего момента, с которым воздействует на ось 1 наклона операционный микроскоп вместе с принадлежностями и осью 2 поворота, посредством первого двигателя 12 устанавливается такая сила натяжения первой пружины 11, что возникает противодействующий вращающий момент относительно оси 1 наклона, который действует в направлении, противоположном воздействию вращающего момента и точно равен ему по величине. Это происходит вследствие того, что на первый центральный вал первой пружины 11 воздействует первое устройство передачи вращающего момента и при помощи соответствующих средств передает усилие первой пружины 11 на ось 1 наклона. В данном варианте реализации это осуществляется посредством первого ведущего зубчатого колеса 17, которое расположено на первом центральном валу первой пружины 11 и которое посредством первого зубчатого ремня 18 на первое ведомое зубчатое колесо 19, расположенное на оси 1 наклона, передает усилие на ось 1 наклона. В данном варианте осуществления используется передаточное соотношение 1:3, чтобы иметь возможность компенсировать относительно высокие вращающие моменты, воздействующие на ось 1 наклона вследствие того, что плечо рычага за счет оси 2 поворота велико, при помощи желательно минимального по размеру первого компенсатора вращающего момента. Однако упомянутое передаточное соотношение отнюдь не обязательно, и оно может принимать также любое другое значение, которое позволяет получить достаточно малый габаритный размер первого устройства для передачи вращающего момента. Другие, альтернативные устройства для передачи усилия известны специалисту, так что здесь не будет приведено их более подробное описание.
Чтобы иметь возможность фиксировать операционный микроскоп в желаемом для оператора положении, вокруг первого центрального вала первой пружины 11 расположен первый тормоз 13. В данном варианте осуществления речь идет об электромагнитном тормозе, который хорошо известен специалисту и, таким образом, дальнейшее его описание не требуется. Возможно также использование других видов тормозов, которые известны специалисту. Посредством этого первого тормоза 13 первый центральный вал блокируется в закрытом положении, так что посредством первого зубчатого ремня 18 первого устройства 14 для передачи вращающего момента заблокирована ось 1 наклона. Только когда оператор перемещает операционный микроскоп в другое положение, первый тормоз 13 должен открываться, чтобы допустить перемещение и одновременно позволить произвести компенсацию измененного вращающего момента, который воздействует относительно оси 1 наклона в результате измененного положения системы, состоящей из операционного микроскопа вместе с принадлежностями и осью 2 поворота, посредством согласованного противодействующего вращающего момента.
Принцип действия и режим функционирования в отношении оси 2 поворота по существу такой же, как описанный выше в отношении оси 1 наклона. Поэтому в дальнейшем только еще раз в общих чертах коротко разъясняется, какие детали и как расположены по отношению друг к другу, и какие функции они исполняют. Единственное принципиальное различие состоит в осуществлении второго устройства 24 передачи вращающего момента. Для него выбирается не передаточное соотношение 1:3, а используется соотношение 1:1. Это обусловлено тем, что относительно оси 2 поворота, вследствие положения центра тяжести операционного микроскопа вместе с принадлежностями, воздействуют меньшие вращающие моменты, так как плечо рычага здесь значительно короче, поскольку нет промежуточного включения другой оси, в отличие от описанного выше в отношении оси 1 наклона; там это была ось 2 поворота. Таким образом, соотношение 1:1 достаточно для того, чтобы все же иметь возможность разместить малогабаритный второй компенсатор вращающего момента.
Второй компенсатор вращающего момента включает в себя вторую пружину 21 в форме спиральной пружины, которая закреплена своим первым концом на втором корпусе 20, а своим вторым концом на втором центральном валу (не показан) второй пружины 21. Второй центральный вал имеет на своем свободном конце второе ведущее зубчатое колесо 27, которое передает усилие со второго центрального вала на второе ведомое зубчатое колесо 29 на ось 2 поворота посредством второго зубчатого ремня 28. Оба этих зубчатых колеса 27, 29 вместе с зубчатым ремнем 28 образуют второе устройство 24 передачи вращающего момента. Вокруг второго центрального вала второй пружины 21 расположен второй электромагнитный тормоз 23, который может фиксировать второй центральный вал. Для приложения усилия ко второй пружине 21 второй компенсатор вращающего момента имеет второй двигатель 22, который посредством шестерни взаимодействует с корпусом второй пружины 21.
Кроме того, имеются второй датчик 25 усилия и второй датчик 26 местоположения, которые решают те же задачи в отношении оси 2 поворота, как аналогичные датчики в первом компенсаторе вращающего момента.
Устройство согласно изобретению может работать в различных режимах. В первом режиме операционный микроскоп перемещают в другое положение при незадействованных тормозных системах 13, 23 до тех пор, пока не достигают того положения, в котором хотел бы работать оператор. В этом положении посредством датчиков 16, 26 местоположения определяются - как это уже пояснялось выше - положения оси 1 наклона и оси 2 поворота, а после этого оператор может посредством клавиш управлять обоими двигателями 12, 22 до тех пор, пока вся система не будет сбалансирована. Когда это сбалансированное положение достигнуто, оператор блокирует ось 1 наклона и ось 2 поворота посредством обоих тормозов 13 и 23, так что положение операционного микроскопа не может быть изменено, даже если оператор непреднамеренно толкнет операционный микроскоп.
Достижение сбалансированного состояния в определенном положении оси 1 наклона и оси 2 поворота может производиться также автоматически, вместо перемещения при помощи клавиш. Во втором режиме оба тормоза 13, 23 в актуальном положении оси 1 наклона и оси 2 поворота автоматически отпускаются на заданное короткое время, так что измененные вращающие моменты поворачивают ось наклона 1 и ось 2 поворота. Исходя из временных изменений положения оси 1 наклона и оси 2 поворота, которые детектируются соответственно первым датчиком 16 местоположения или вторым датчиком 26 местоположения, эти значения могут пересчитываться на основе уже упомянутых выше алгоритмов таким образом, что может рассчитываться необходимое изменение соответствующей жесткости пружин 11, 21 и автоматически производиться регулировка при помощи обоих двигателей 12, 22. Как только это произошло, оба тормоза 13, 23 снова активизируются, чтобы заблокировать ось 1 наклона и ось 2 поворота в том положении, которое предварительно установил оператор.
Когда такое сбалансированное положение имеет место, релевантные для этого положения параметры обоих датчиков 16, 26 местоположения и обоих датчиков 15, 25 усилия могут записываться в память и определяться на основе вышеназванных, необходимых для расчета вращающих моментов параметров соответствующей системы, в зависимости от используемых операционных микроскопов вместе со сменными принадлежностями. После того, как такое сбалансированное положение однажды достигнуто, в дальнейшем для любого последующего положения, в которое оператор приводит операционный микроскоп, на основании полученных данных возможно автоматическое уравновешивание вращающего момента во время работы в третьем режиме. Это происходит посредством того, что после отпускания тормозов 13, 23 оператором операционный микроскоп приводится в новое положение. Там оба тормоза 13, 23 снова активизируются, так что ось 1 наклона и ось 2 поворота снова оказываются заблокированными. На основании данных обоих датчиков 16, 26 местоположения возможно определение как изменения местоположения оси 1 наклона и оси 2 поворота, так и изменения их углового положения. Поскольку перед изменением положения система была сбалансирована, теперь на основании полученных новых данных и известных механических параметров может рассчитываться новое положение и вместе с тем новый противодействующий вращающий момент. Теперь заново рассчитанный противодействующий вращающий момент посредством управления обоими двигателями 12, 22 передается на обе пружины 11, 21, изменяя соответствующее натяжение каждой из них. После этого посредством обоих устройств 14, 24 для передачи вращающего момента соответствующий противодействующий вращающий момент передается на ось 1 наклона и на ось 2 поворота.
Недостатком описанного выше третьего режима является то, что оператор должен прилагать относительно большое усилие при изменении положения, так как во время прохождения пути из старого положения в новое положение он не получает поддержки за счет уравновешивания вращающего момента. Напротив, оно происходит только к моменту выравнивания в заданном оператором конечном положении. Эту проблему устраняют благодаря тому, что автоматическое уравновешивание вращающего момента в четвертом режиме производится во время сдвига. Для этого во время всего перемещения от начального положения к конечному положению изменение местоположения и угла поворота оси 1 наклона и оси 2 поворота постоянно фиксируется обоими датчиками 16, 26 местоположения и передается в электронно-вычислительную машину. Затем последняя посредством уже упомянутых выше алгоритмов в постоянном режиме определяет, каким образом следует изменять посредством двигателей 12, 22, противодействующий вращающий момент в соответствующей пружине 11, 21, чтобы иметь сбалансированную систему. Благодаря уравновешиванию всей системы, имеющему место в каждом промежуточном положении - вращающий момент противоположен и равняется по величине приложенному противодействующему вращающему моменту - оператор может осуществлять все перемещение операционного микроскопа из начального положения в конечное положение с очень незначительным расходом энергии. После того, как конечное положение достигнуто, оба тормоза 13, 23 снова блокируются, чтобы оператор мог работать в этом положении, и непреднамеренное касание операционного микроскопа не могло приводить к изменению его положения.
Перечень условных обозначений:
1 ось наклона
2 ось поворота
3 присоединительная деталь
4 фланец
10 первый корпус
11 первая пружина
12 первый двигатель
13 первый тормоз
14 первое устройство для передачи вращающего момента
15 первый датчик усилия
16 первый датчик местоположения
17 первое ведущее зубчатое колесо
18 первый зубчатый ремень
19 первое ведомое зубчатое колесо
20 второй корпус
21 вторая пружина
22 второй двигатель
23 второй тормоз
24 второе устройство для передачи вращающего момента
25 второй датчик усилия
26 второй датчик местоположения
27 второе ведущее зубчатое колесо
28 второй зубчатый ремень
29 второе ведомое зубчатое колесо.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ ВЕЛИЧИН ВНУТРИ ПОМЕЩЕНИЯ | 2016 |
|
RU2663268C2 |
| ШТАТИВ ДЛЯ УДЕРЖАНИЯ И ПОЗИЦИОНИРОВАНИЯ ПОЛЕЗНОЙ НАГРУЗКИ В ПРОСТРАНСТВЕ | 2009 |
|
RU2413897C2 |
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ ПРОМЫШЛЕННОГО РОБОТА | 2022 |
|
RU2785421C1 |
| Хирургическая система стереовидения | 2023 |
|
RU2802453C1 |
| МИКРОСКОП ДЛЯ РАБОТЫ В ПРОХОДЯЩЕМ И (ИЛИ) ОТРАЖЕННОМ СВЕТЕ | 1986 |
|
RU2037854C1 |
| ШТАТИВНЫЙ МОДУЛЬ КАМЕРЫ И УСТРОЙСТВО ДЛЯ СТЕРЕОСКОПИЧЕСКОЙ СЪЕМКИ | 2008 |
|
RU2477505C2 |
| КОМПЕНСАТОР ИЗНОСА ДЛЯ БАРАБАННОГО ТОРМОЗА ПНЕВМАТИЧЕСКОЙ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2743242C1 |
| МОБИЛЬНЫЙ МАЛОГАБАРИТНЫЙ РЕНТГЕНОВСКИЙ АППАРАТ | 2006 |
|
RU2334465C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2820361C1 |
Регулируемый штатив для оптического прибора для наблюдения, в частности для операционного микроскопа, имеет ось (1) наклона и ось (2) поворота для прибора и фланец (4) для соединения с прибором или дополнительным элементом регулируемого штатива. На одной из обеих осей (1,2) расположен первый компенсатор вращающего момента, содержащий первый тормоз (13) для фиксации оси (1, 2) и первую пружину (11), соединенную с первым двигателем (12), для регулирования силы натяжения первой пружины (11), причем первый двигатель (12) соединен с первым блоком управления двигателем, первое устройство (14) передачи вращающего момента, которое выполнено между первой пружиной (11) и осью (1,2), первый датчик местоположения для определения положения оси (1, 2) и первый датчик (15) усилия для определения силы натяжения первой пружины (11). Датчик (16) местоположения и датчик (15) усилия соединены с первым блоком управления двигателем. Обеспечивается простое решение проблемы уравновешивания вращающего момента для прибора. 9 з.п. ф-лы, 1 ил.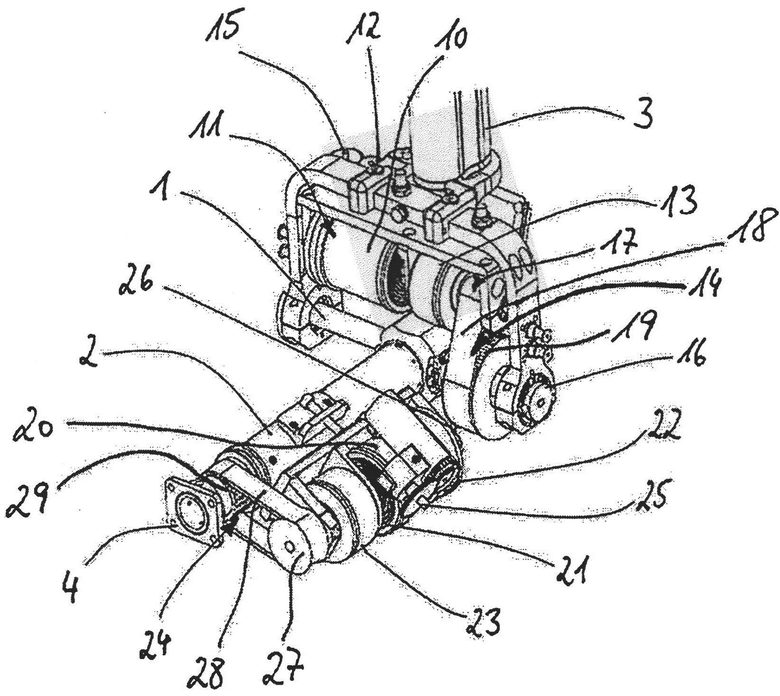
1. Регулируемый штатив для оптического прибора для наблюдения, в частности для операционного микроскопа, имеющий
ось (1) наклона и ось (2) поворота для оптического прибора для наблюдения и
фланец (4) для соединения с оптическим прибором для наблюдения или дополнительным элементом регулируемого штатива,
причем на одной из обеих осей (1,2) расположен первый компенсатор вращающего момента, содержащий
- первый тормоз (13) для фиксации оси (1, 2) и
- первую пружину (11), соединенную с первым двигателем (12), для регулирования силы натяжения первой пружины (11),
причем первый двигатель (12) соединен с первым блоком управления двигателем,
- первое устройство (14) передачи вращающего момента, которое выполнено между первой пружиной (11) и осью (1,2),
- первый датчик (16) местоположения для определения положения оси (1, 2) и
- первый датчик (15) усилия для определения силы натяжения первой пружины (11),
- причем датчик (16) местоположения и датчик (15) усилия соединены с первым блоком управления двигателем.
2. Штатив по п. 1, в котором дополнительно к первому компенсатору вращающего момента на другой оси (1,2) расположен второй компенсатор вращающего момента, содержащий
- второй тормоз (23) для фиксации оси (1,2),
- вторую пружину (21), соединенную со вторым двигателем (22), для регулирования силы натяжения второй пружины (21),
причем второй двигатель (22) соединен со вторым блоком управления двигателем,
- второе устройство (24) передачи вращающего момента, которое выполнено между второй пружиной (21) и осью (1, 2),
- второй датчик (26) местоположения для определения положения оси (1, 2) и
- второй датчик (25) усилия для определения силы натяжения второй пружины (21).
3. Штатив по п. 1 или 2, в котором ось (1) наклона расположена по существу перпендикулярно оси (2) поворота.
4. Штатив по п. 1 или 2, в котором первое устройство передачи вращающего момента и/или второе устройство передачи вращающего момента имеет передаточное соотношение, которое отличается от величины 1:1, в частности находится между 1:1,5 и 1:4, предпочтительно составляет 1:3.
5. Штатив по п. 1 или 2, в котором первый тормоз (13) соединен с первым блоком управления торможением и/или второй тормоз (23) соединен со вторым блоком управления торможением.
6. Штатив по п. 1 или 2, в котором первый блок управления двигателем и/или второй блок управления двигателем и/или первый блок управления торможением и/или второй блок управления торможением содержится в электронно-вычислительной машине в виде программного обеспечения.
7. Штатив по п. 1 или 2, в котором ось первого тормоза (13) и ось первой пружины (11) совпадают и/или ось второго тормоза (23) и ось второй пружины (21) совпадают.
8. Штатив по п. 1 или 2, в котором первый тормоз (13) и/или второй тормоз (23) представляет собой электромагнитный тормоз.
9. Штатив по п. 1 или 2, в котором на его фланце (4) размещен операционный микроскоп или дополнительный элемент штатива.
10. Штатив по п. 1 или 2, который представляет собой составную часть потолочного, настенного или напольного штатива.
| DE 9219240 U1, 27.09.2001 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 5667186 A, 16.09.1997. | |||

