ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к промышленному роботу с адаптивными компенсаторами внешних нагрузок, а именно, к компенсатору отклонений крутящего момента двигателя привода руки манипулятора.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В промышленных многозвенных роботах крутящего момента двигателя может иметь определенные отклонения, для минимизации отклонения крутящего момента в промышленных роботах предложено использовать компенсатор веса нижнего плеча, создающий момент, противоположный моменту, развиваемому за счет веса нижнего плеча.
Из уровня техники широко известны системы компенсации промышленных роботов.
Известен, многошарнирный манипулятор (см. GB2114536A, опубл. 24.08.1983)(1), в состав которого входят: плечо, один конец которого шарнирно поддерживается участком плечевого сустава основного корпуса с возможностью вращения вокруг указанного участка плечевого сустава; предплечье, один конец которого шарнирно поддерживается участком локтевого сустава, образованным на другом конце указанного плеча, с возможностью вращения вокруг указанного участка локтевого сустава; дистальное устройство, прикрепленное к дистальному концу указанного нижнего плеча; первую звездочку, установленную на указанном нижнем рычаге, центр которой совпадает с центром вращения указанной части локтевого сустава; вторую звездочку, прикрепленную с возможностью вращения к указанной части плечевого шарнира, при этом центр указанной второй звездочки расположен соосно с центром вращения указанной части плечевого шарнира; передаточные средства для соединения указанных первой и второй звездочек для их поворота на один и тот же угол; и средство создания крутящего момента, один конец которого прикреплен к указанному основному корпусу, а другой конец прикреплен к указанной второй звездочке для передачи максимального крутящего момента, когда указанное нижнее плечо находится в горизонтальном положении, и для передачи минимального крутящего момента, когда указанное нижнее плечо находится в вертикальном положении.
Раскрытый в (1) компенсатор имеет ряд недостатков, такие как, низкая эффективность, которая обуславливается тем, что компенсатор сложен и его конструкция еще более усложняется при большом количестве степеней свободы.
Наиболее близким аналогом заявленного устройства, по мнению заявителя, является промышленный робот (см. EP0189483A1, опубл. 06.08.1986) (2), который снабжен корпусом, вращающимся валом, поддерживаемым с возможностью вращения на корпусе, приводным двигателем для вращения вращающегося вала и манипулятором робота, соединенным своим базовым концом с поворотный вал и выполнен с возможностью поворота на своем свободном конце в соответствии с вращением поворотного вала, так что рычаг перемещается вверх и вниз. Балансир силы тяжести манипулятора предназначен для приложения к вращающемуся валу момента (-М), противодействующего моменту (М), который возникает вокруг оси вращающегося вала из-за силы тяжести, приложенной к манипулятору робота. Балансир снабжен натяжной пружиной, соединенной одним концом с корпусом. Другие концы натяжной пружины соединены с такими двумя частями поворотного вала, которые отстоят друг от друга в направлении вращения вала. Эти две части вращающегося вала, к которым присоединена натяжная пружина, одинаково удалены и симметричны относительно направления вращения вращающегося вала, прямой линии (X), которая соединяет первый упомянутый единственный конец пружина растяжения и ось поворотного вала, когда манипулятор робота находится в вертикальном положении.
Предложенный наиболее близкий аналог наиболее близко подходит к решению проблем, решаемых заявленным изобретением, однако, по мнению заявителя проблема решается не самым эффективным способом.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Соответственно, существует необходимость устранить, по меньшей мере, часть упомянутых выше недостатков. В частности, существует потребность в адаптивной системе компенсации промышленного робота, адаптивность которой проявляется в виде регулировки точек фиксации пружин для получения различных значений противодействующего крутящего момента при той же конфигурации робота.
Данное изобретение направлено на решение технической проблемы, связанной с увеличением эффективности компенсации отклонений крутящего момента промышленного робота.
Техническим результатом изобретения является создание системы адаптивной компенсации промышленного робота повышенной эффективности.
Достижение заявленного технического результат возможно посредством системы адаптивной компенсации промышленного робота, содержащей по меньшей мере две вращательных пары с по меньшей мере двумя степенями свободы, на которых закреплен компенсатор, выполненный в виде рычажной системы, состоящей из рычага с закрепленными на нем двумя пружинами, закрепленными также на вращательной паре.
Заявленная система компенсации промышленного робота характеризуется тем, что пружины закреплены на активно регулируемых точках поворота, а количество компенсаторов равно количеству степеней свободы.
В частном варианте выполнения системы каждый компенсатор снабжен самоблокирующийся червячной передачей, обеспечивающий передачу уравновешивающего крутящего момента компенсатора, размещенной на тыльной стороне рычажной системы.
В одном из частных вариантов выполнения, закрепления пружин расположены на расстоянии от центра колеса и на расстоянии 90° друг от друга.
В другом частном варианте выполнения пружины имеют жесткость, обеспечивающую уравновешивание вращательной пары.
Компенсатор, в одном из вариантов выполнения, снабжен трансмиссией, обеспечивающей передачу уравновешивающего крутящего момента компенсатора от червячной передачи.
Вышеупомянутые и другие цели, преимущества и особенности настоящего изобретения станут более очевидными из следующего не ограничивающего описания его примерного варианта осуществления, приведенного в качестве примера со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется чертежами, на которых:
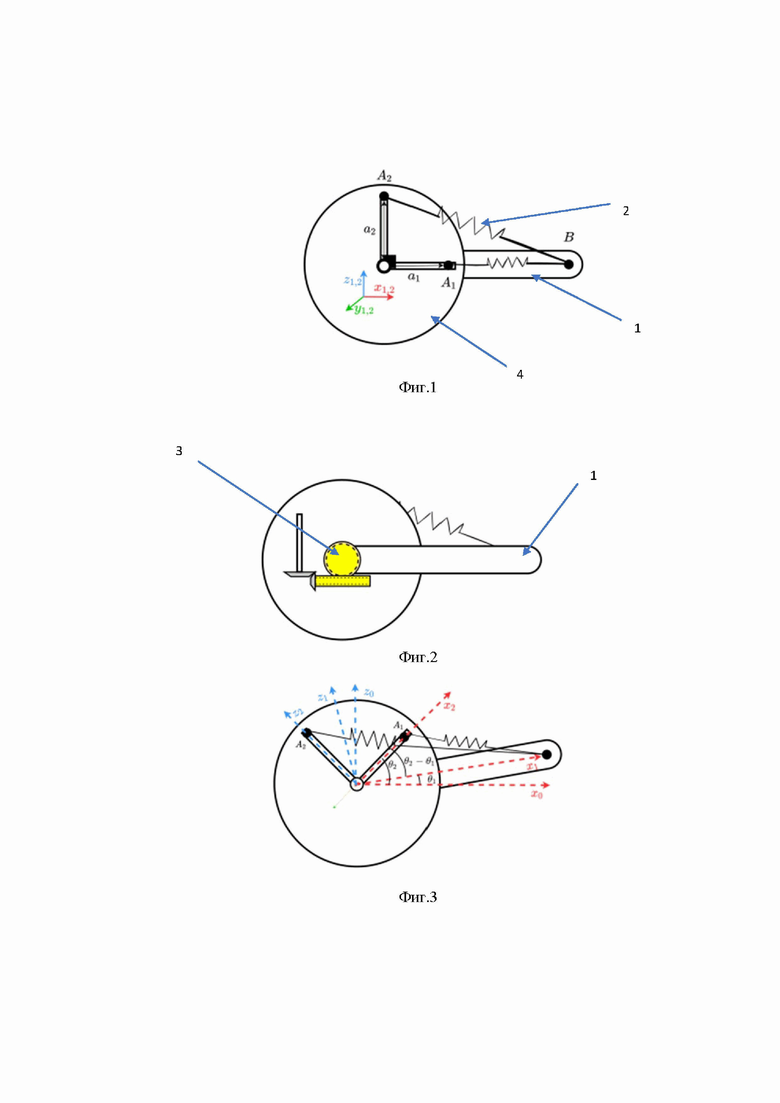
Фиг. 1 – геометрическое изображение колесно-рычажного механизма компенсатора с 2 степенями свободы;
Фиг.2 – геометрическое изображение зацепления червячной передачи, размещенного на тыльной стороне колесно-рычажного механизма;
Фиг. 3 – изображение, иллюстрирующее рычажно-колесный механизм, в котором рычаг поворачивается на угол θ1, а колесо поворачивается на угол θ2;
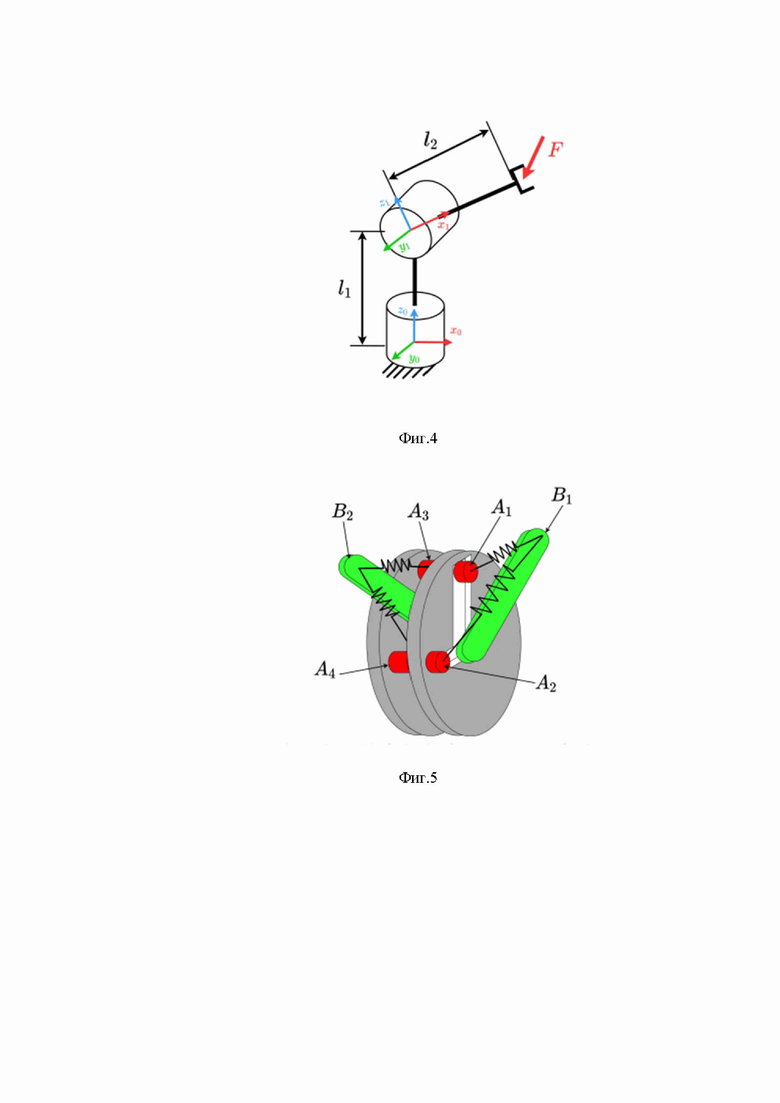
Фиг.4 – схематическое изображение манипулятора с двумя степенями свободы;
Фиг.5 – модель адаптивного силового компенсатора;
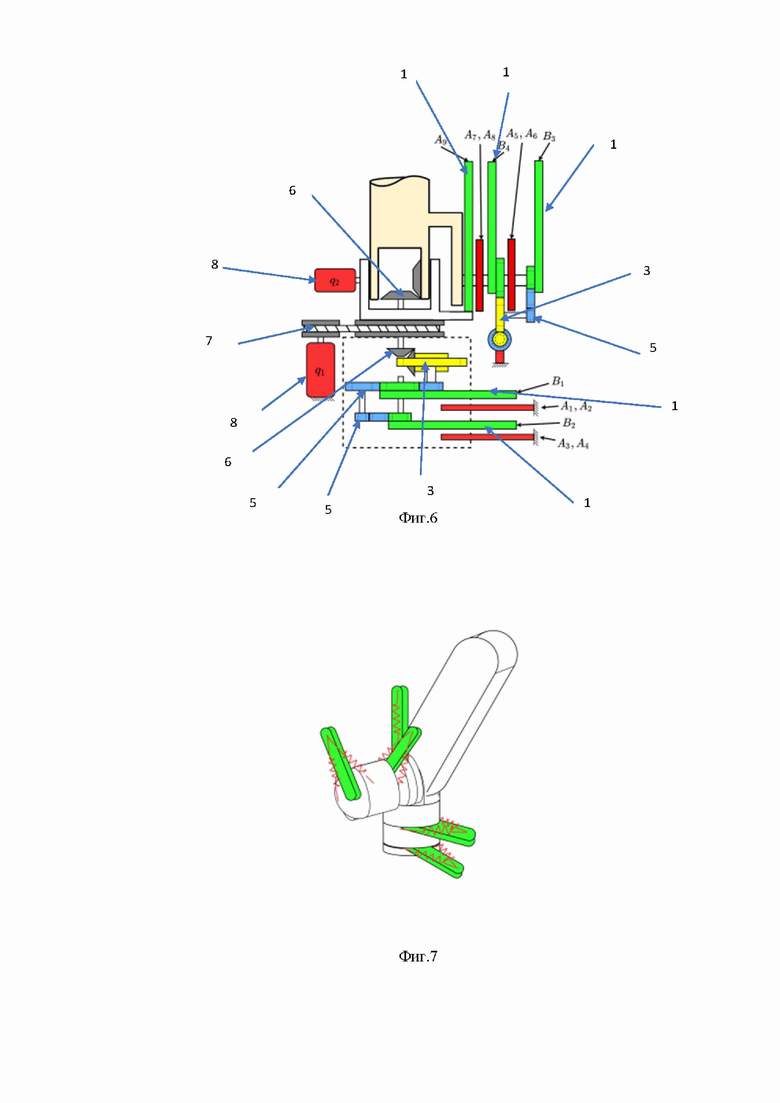
Фиг. 6 – схематическое изображение сборки варианта системы;
Фиг.7 – 3D изображение сборки варианта системы.
Позиции на фиг.1-7 обозначают следующее:
1 - рычаг;
2 - пружина;
3 - колесо;
4 - червячная передача;
5 - зубчатая передача;
6 - коническая передача;
7 - ременная передача;
8 - актюатор.
Эти чертежи не охватывают и, кроме того, не ограничивают весь объем вариантов реализации данного технического решения, а представляют собой только иллюстративный материал частного случая его реализации.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Заявленная следующая система адаптивной компенсации промышленного робота. Каждый компенсатор системы состоит из колесно-рычажного механизма, включающий рычаг (1) и колесо (3) с группой пружин (2), создающих противодействующий крутящий момент для компенсации внешней силы. Пружины (2) закреплены на регулируемых точках поворота, чтобы обеспечить компенсацию диапазона полезной нагрузки. На тыльной стороне каждого колесно-рычажного механизма размещены самоблокирующиеся червячные передачи (4), обеспечивающие передачу крутящего момента компенсатора только на колесо или рычаг.
В качестве одного из примеров выполнения адаптивной компенсации промышленного робота предлагается конструкция компенсатора с манипулятором с двумя степенями свободы, который состоит из двух ортогональных вращательных суставов. Результаты моделирования показывают, что полная компенсация внешней силы возможна так же, как и компенсация некоторых составляющих векторов сил. Адаптация проявляется в виде регулировки пружин точек фиксации для получения различных значений противодействующего крутящего момента для той же конфигурации робота. Устройство компенсатора основано на соединении шарниров робота с комбинацией пружин, производящих сумму крутящих моментов, противодействующих крутящему моменту полезной нагрузки. Это позволяет полностью компенсировать отклонения крутящего момента для постоянной полезной нагрузки по всему рабочему пространству робота в то же время имея возможность повторно регулировать жесткость компонентов для соответствия различным полезным нагрузкам.
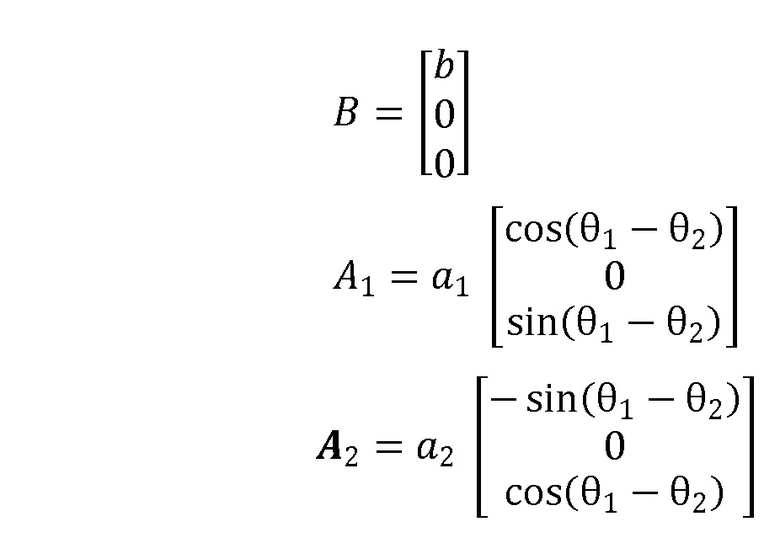
Для систем с несколькими степенями свободы крутящий момент, приложенный к одному шарниру из-за внешней силы, зависит от настройки на манипуляторе. На фиг. 1 показан колесно-рычажный механизм компенсатора. Рычаг (1) и колесо (3) вращаются вокруг одного и того же центра с углами θ1 и θ2 соответственно. Два гнезда A1 и A2 закреплены на некотором расстоянии a1 и a2 от по центру колеса и раздвинуты со сдвигом на 90°. Точка B фиксируется на расстоянии b вдоль рычага. Две пружины с коэффициентами [k1, k2] соединяют точку B и обе точки A1 и A2 соответственно.
Принимая поворот рычага за представленное значения θ1, в то время как вращение колеса представляет собой θ2. Если колесо и рычаг вращаются в одном направлении, значение (θ1 − θ2) может быть реализовано. В то время как, если они вращаются в противоположных направлениях, значение (θ1+θ2) может быть реализовано, принимая направление против часовой стрелки в качестве положительного направления. На рис. 3 представлена реализация θ1−θ2. Принимая систему отсчета рычага, где ось x указывает вдоль рычага, образует вектор положения точек A1, A2 и B следующим образом:
Крутящий момент, создаваемый пружиной между точками A1 и B можно сформулировать следующим образом:
 ,
,
где k1 — коэффициент жесткости пружины, соединяющей точки A1 и B, а τa1 — момент, произведенный пружиной.
 ,
,
где τa1, y — y-компонента τa1, когда х и z компоненты равны нулю.
Аналогично для пружины между точками A2 и B:

При это y-компонент τa1 выражена следующим образом:

Сумма моментов τsum вокруг центра вращения выражена следующим образом:

Сместив положение точки Ai на угол 180° вокруг центра колеса, сможем реализовать одинаковый крутящий момент по часовой стрелке или против часовой стрелки вокруг центра вращения.
Использование самоблокирующейся червячной передачи обеспечивает крутящий момент прикладывается к колесу и препятствует воздействию крутящего момента рычага. На рис. 2 показано, что рычаг (1) соединен с червячной передачей (3). Реализация различных значений для τsum станет возможна, когда расстояния a1 и a2 станут регулируемыми.
Далее приводится пример предложенной системы для компенсации трехмерной внешней силы, действующей на концевой эффектор показанного манипулятора с двумя степенями свободы (фиг.4). Система имеет два ортогональных поворотных шарнира, вращающихся с координатами шарнира q1 и q2 с длиной звеньев l1 и l2. Цель состоит в том, чтобы компенсировать крутящий момент шарниров манипулятора с помощью системы, представленной на фиг.1-3. Вычисления показали, что выражений крутящего момента показывает сходство между этими выражениями и полученным для примера системы фиг. 1-3. Это означает, что можно разработать комбинацию системы на фиг. 1 для компенсации трехмерной внешней силы, действующей на манипулятор. Также можно подобрать такие коэффициенты жесткости пружин, которые бы компенсировали крутящий момент на втором стыке при любой конфигурации.
Реализация показывает метод достижения статической балансировки по отношению к некоторой произвольной внешней силе. Однако в действительности, полезнее иметь встречную балансировку механизма, которая может адаптироваться к диапазону силы. Предложение состоит в том, чтобы сделать расстояния ai переменными, чтобы это позволяло механизмам противодействия крутящему моменту, реализовывать ряд крутящих моментов, которые могут статически компенсировать диапазон значений внешней силы. Это стало возможным благодаря такому подходу, который вводит систему компенсации компонентов крутящего момента, которые могут быть реализован в виде простых механических компонентов, которые состоят из простых механизмов, как показано на рисунке 1.
В качестве примера системы адаптивной компенсации многозвенного робота приведено схематическое изображение фиг.6, и фиг.7. Система содержит трансмиссию, передающую крутящий момент на колесно-рычажные системы, размещенные на каждой вращающейся паре многозвенного робота , рычаг (1) соединен непосредственно или через зубчатую передачу (5) с червячными передачами (3), которые соединены через коническую передачу (6) и ременную передачу(7) с актюаторами (8). Предлагаемая система представляет собой предварительную концепцию полной компенсации крутящего момента в сочленениях под действием внешней силы. Поскольку манипулятор представляет собой многозвенный механизм, внешнее усилие, приложенное к концевому эффектору, создает нелинейный крутящий момент на сочленениях манипулятора. При применении в совокупности этих механических компонентов с сочленениями манипулятора применяется сумма крутящих моментов, которая эквивалентна приложенному крутящему моменту, чтобы добиться статической балансировки.
ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ
Предложенные устройства предназначены для ряда применений, включающих компенсацию отклонений крутящего момента двигателя привода руки манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ ПРОМЫШЛЕННОГО РОБОТА | 2022 |
|
RU2785422C1 |
| Промышленный робот-манипулятор с системой двойных энкодеров и способ его позиционирования | 2018 |
|
RU2696508C1 |
| КОМПЕНСАТОР ИЗНОСА ДЛЯ БАРАБАННОГО ТОРМОЗА ПНЕВМАТИЧЕСКОЙ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2743242C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| Способ и система для определения по меньшей мере одного свойства манипулятора | 2014 |
|
RU2672654C2 |
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2570939C1 |
| Внутритрубный колёсный движитель динамического типа для подвижного состава высокоскоростной вакуумно-трубопроводной магистрали | 2019 |
|
RU2706850C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
Изобретение относится к промышленному роботу с адаптивными компенсаторами внешних нагрузок, а именно к компенсатору отклонений крутящего момента двигателя привода руки манипулятора. Система адаптивной компенсации промышленного робота содержит по меньшей мере две вращательные пары с по меньшей мере двумя степенями свободы, на которых закреплен компенсатор. Компенсатор выполнен в виде колесно-рычажной системы, состоящей из рычага с закрепленными на нем двумя пружинами, закрепленными также на вращательной паре. Пружины закреплены на активно регулируемых точках поворота, а количество компенсаторов равно количеству степеней свободы. Обеспечивается регулировка точек фиксации пружин для получения различных значений противодействующего крутящего момента. 4 з.п. ф-лы, 7 ил.
1. Система адаптивной компенсации промышленного робота, содержащая по меньшей мере две вращательные пары с по меньшей мере двумя степенями свободы, на которых закреплен компенсатор, выполненный в виде колесно-рычажной системы, состоящей из рычага с закрепленными на нем двумя пружинами, закрепленными также на вращательной паре, отличающаяся тем, что пружины закреплены на активно регулируемых точках поворота, а количество компенсаторов равно количеству степеней свободы.
2. Система по п.1, отличающаяся тем, что каждый компенсатор снабжен самоблокирующейся червячной передачей, обеспечивающей передачу уравновешивающего крутящего момента компенсатора, размещенной на тыльной стороне рычажной системы.
3. Система по п.1, отличающаяся тем, что места закрепления пружин расположены на расстоянии от центра колеса и на расстоянии 90° друг от друга.
4. Система по п.1, отличающаяся тем, что пружины имеют жесткость, обеспечивающую уравновешивание вращательной пары.
5. Система по п.2, отличающаяся тем, что компенсатор снабжен трансмиссией, обеспечивающей передачу уравновешивающего крутящего момента компенсатора от червячной передачи.
| 0 |
|
SU189483A1 | |
| БИОЛОГИЧЕСКИ АКТИВНОЕ ВЕЩЕСТВО (ВАРИАНТЫ) | 1997 |
|
RU2114536C1 |
| СПОСОБ КОМПЕНСАЦИИ ОТКЛОНЕНИЯ РАБОЧЕЙ ТОЧКИ | 2015 |
|
RU2706260C2 |
| Способ повышения точности перемещений промышленного робота в процессе инкрементального формообразования | 2020 |
|
RU2762693C1 |

