Изобретение относится к способу контроля электромеханической приводной системы.
Уровень техники
В летательном аппарате различные подвижные элементы, такие как элероны, рули или капот реверса тяги, связаны с приводами для обеспечения перемещения между нейтральным положением и активным положением. Для этого каждый привод приводится двигателем в поступательное движение между двумя упорами. Например, в случае закрылка первый упор соответствует нейтральному положению подвижного элемента, а второй упор соответствует активному положению подвижного элемента. При этом, когда двигатель получает питание, он приводит в действие привод, который, в свою очередь, перемещает соответствующий подвижный элемент.
Чтобы обнаруживать возможные неисправности или износ цепи привода подвижного элемента, необходимо контролировать двигатель и привод, что обычно осуществляют при помощи датчиков, связанных с двигателем и/или с приводом.
Однако датчики, обычно расположенные вокруг двигателя и/или привода, не всегда позволяют получать все необходимые измерения для контроля различных электрических и механических параметров приводной цепи. Например, эти датчики не позволяют измерять электромагнитный момент двигателя, который, тем не менее, может служить для определения параметров, необходимых для контроля приводной цепи.
Было предложено осуществлять измерение электромагнитного момента, когда летательный аппарат находится на земле, при помощи внешних измерительных приборов.
Однако это требует, чтобы летательный аппарат находился на земле достаточно долго и регулярно, чтобы измерения можно было осуществлять и обновлять регулярно для учета износа двигателя и привода.
Затем было предложено установить на летательном аппарате дополнительный датчик электромагнитного момента.
Однако это неизбежно приводит к повышению стоимости, а также к увеличению массы и габарита, что, в частности, в области авиации нежелательно.
Задача изобретения
Изобретение призвано предложить способ контроля электромеханической приводной системы, позволяющий преодолеть вышеупомянутые недостатки.
Раскрытие изобретения
В связи с вышеизложенным, объектом изобретения является способ мониторинга электромеханической приводной системы, содержащей по меньшей мере один инвертор, двигатель, питаемый через инвертор, и привод, приводимый в действие двигателем, при этом способ содержит следующие этапы:
- оценивают падение напряжения в питании двигателя, связанное с дефектами инвертора, при помощи фильтра Калмана, учитывающего рабочие данные, в том числе по меньшей мере силу тока, передаваемого инвертором на двигатель, управляющее напряжение инвертора и скорость вращения выходного вала двигателя,
- оценивают по меньшей мере коэффициент электромагнитного момента двигателя с учетом оценочного падения напряжения и рабочих данных, в том числе силы тока, передаваемого инвертором на двигатель, управляющего напряжения инвертора, а также отклонения силы тока, передаваемого инвертором на двигатель, и скорости вращения выходного вала двигателя,
- вычисляют электромагнитный момент двигателя на основании коэффициента электромагнитного момента двигателя и рабочей данной, которой является сила тока, передаваемого инвертором на двигатель.
Заявленный способ позволяет оценивать напрямую посредством вычислений электромагнитный момент, что позволяет избежать установки тяжелого и дорогого специального датчика вместе с электромеханической приводной системой для измерения этой величины. В случае необходимости, на основании этого электромагнитного момента можно определять различные дополнительные механические параметры, например, такие как КПД комплекса двигатель/привод, коэффициент вязкого трения и момент сухого трения, при этом последние два параметра характеризуют механические трения комплекса двигатель/привод. Предпочтительно эта оценка электромагнитного момента учитывает погрешности на возмущениях, связанных с дефектами инвертора, которые выражаются падениями напряжения, связанными с мертвым временем, а также потери на переключение и на проводимость. Таким образом, оценка электромагнитного момента является относительно точной.
Кроме того, вычисление электромагнитного момента осуществляют напрямую в ходе работы, и оно не требует специальных действий и остановки устройства, содержащего электромеханическую приводную систему, для осуществления этих действий.
В рамках настоящей заявки термин «рабочие данные» обозначает данные, определяемые, когда электромеханическая приводная система находится в эксплуатации и задействована естественным образом, в отличие от данных, которые могли бы быть получены за счет намеренного и специального вывода из эксплуатации электромеханической приводной системы, или от данных, которые могли бы быть получены во время специфических действий электромеханической приводной системы, производимых специально для получения этих данных. В случае, когда электромеханическая приводная система установлена на борту летательного аппарата, в качестве рабочих данных в рамках заявленного способа используют данные, измеряемые в ходе полета (например, во время взлета, посадки, виража…, которые не производят намеренно для воздействия на электромеханическую приводную систему с целью получения указанных данных), а не во время операции технического обслуживания летательного аппарата на земле.
Согласно частному варианту осуществления, способ содержит дополнительный этап, на котором оценивают по меньшей мере один механический параметр электромеханической приводной системы на основании электромагнитного момента, рабочих данных, в том числе по меньшей мере скорости вращения выходного вала двигателя и аэродинамической силы, действующей на привод.
Согласно частному варианту осуществления, механическим параметром является коэффициент вязкого трения, и/или момент динамического сухого трения, и/или КПД комплекса двигатель/привод.
Согласно частному варианту осуществления, способ содержит дополнительный этап, на котором формируют базу данных и в указанную базу вносят оценочные значения по меньшей мере электромагнитного момента двигателя.
Согласно частному варианту осуществления, в базу вносят также другие электрические и механические параметры, отличные от электромагнитного момента, в том числе по меньшей мере сопротивление двигателя, и/или значения индуктивности статора двигателя, и/или коэффициент вязкого трения комплекса двигатель/привод, и/или момент динамического сухого трения комплекса двигатель/привод, и/или прямой КПД комплекса двигатель/привод, и/или опосредованный КПД комплекса двигатель/привод.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания частного варианта осуществления изобретения.
Краткое описание чертежей
Изобретение будет более понятно из нижеследующего описания частного и не ограничительного варианта осуществления изобретения. Оно представлено со ссылками на прилагаемые фигуры, на которых:
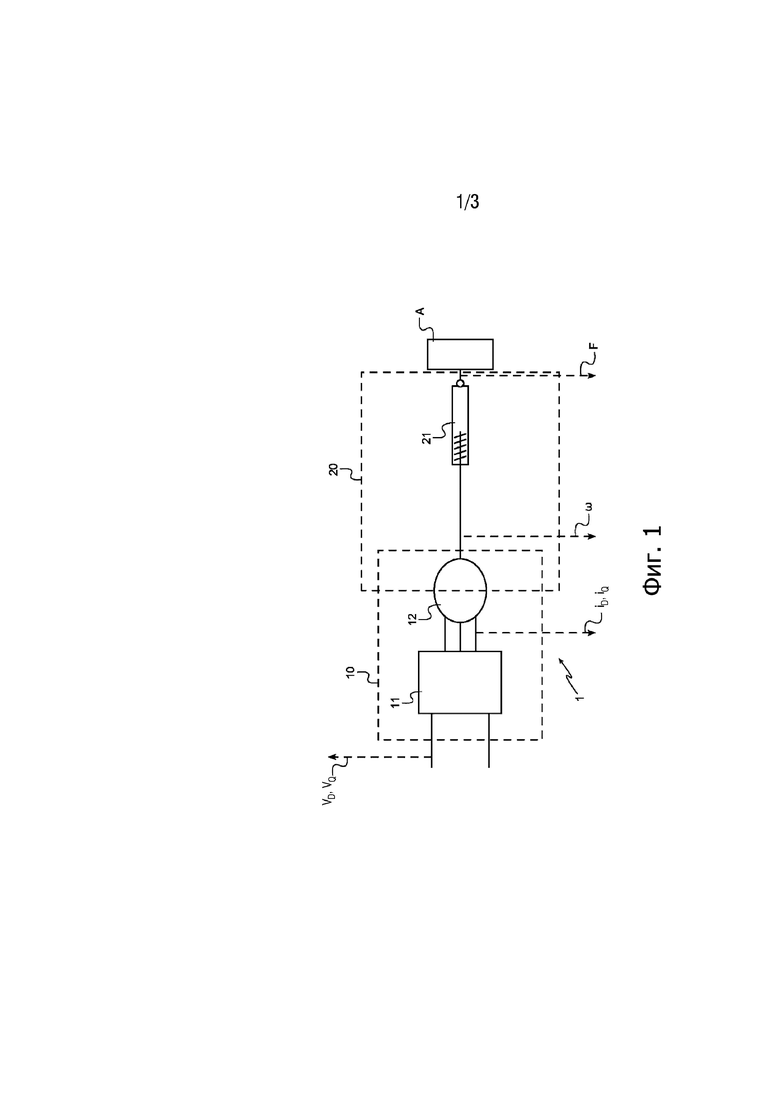
фиг. 1 - схематичный вид электромеханической приводной системы, в которой применяют способ согласно частному варианту осуществления изобретения;
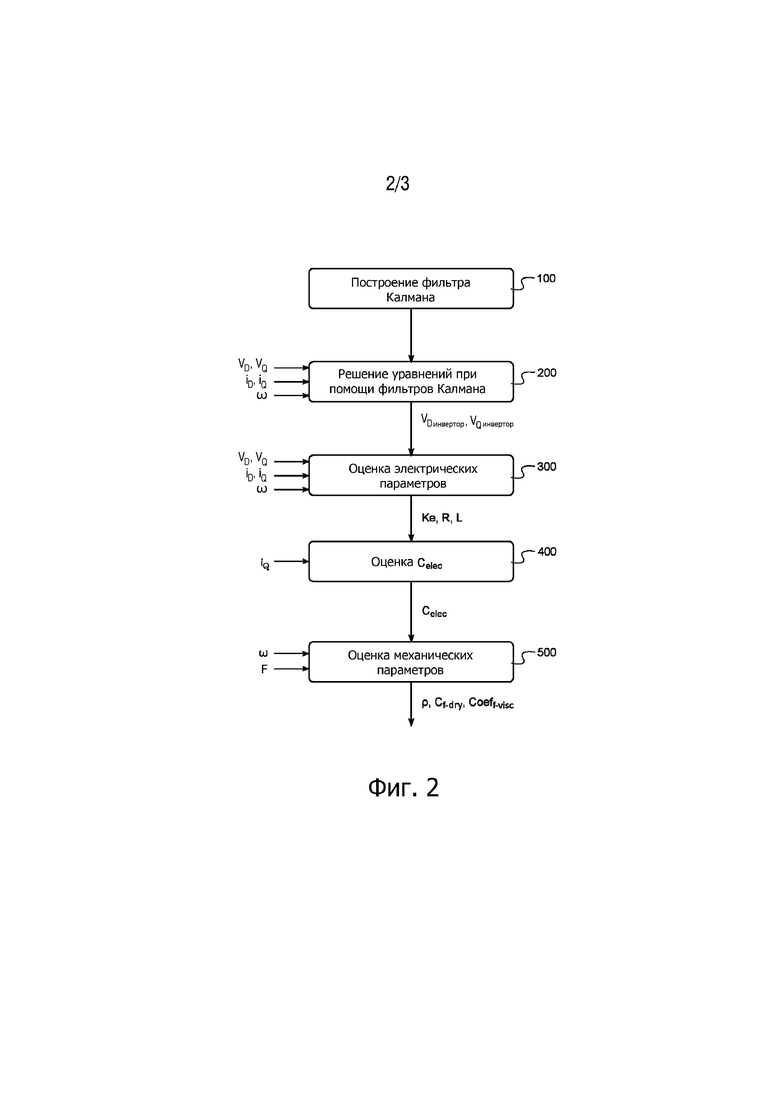
фиг. 2 - схема различных этапов способа, осуществляемого при помощи системы, показанной на фиг. 1;
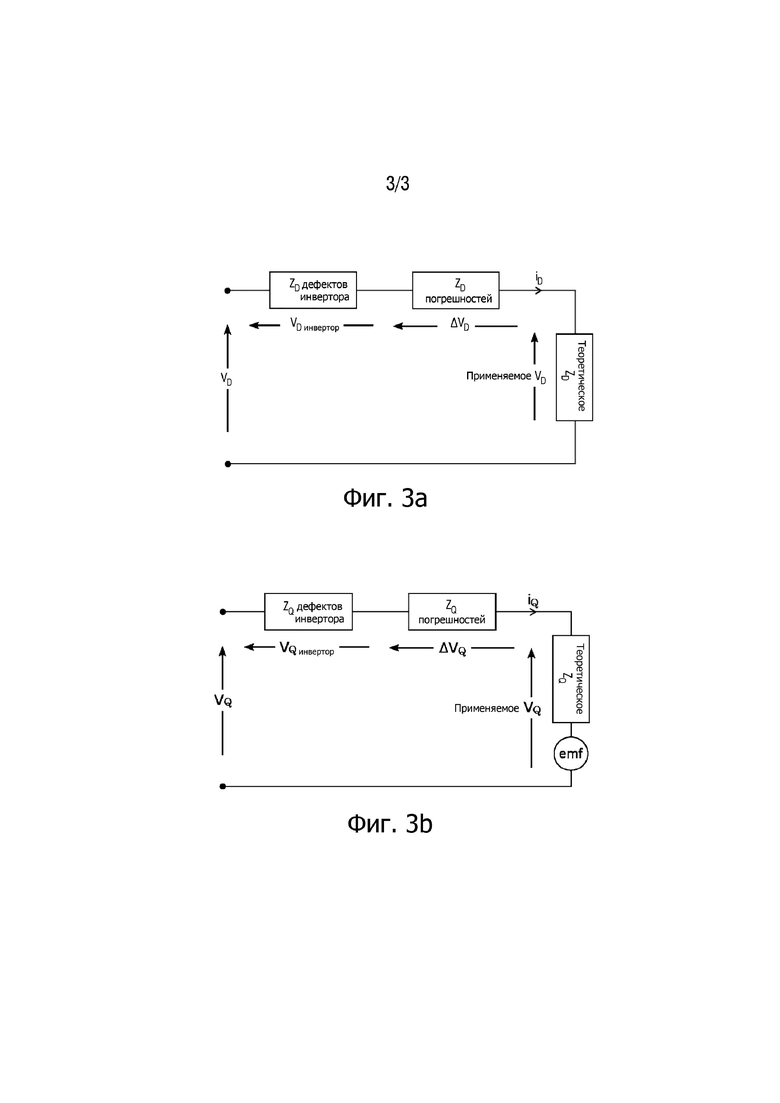
фиг. 3а и 3b - электрические схемы, моделирующие электрическую часть системы, показанной на фиг. 1, в системе координат ротора соответственно с осью d и осью q.
Подробное описание изобретения
Как показано на фиг. 1 и 2, способ контроля согласно частному варианту осуществления изобретения в данном случае применяют для электромеханической приводной системы 1 элерона А летательного аппарата. Разумеется, этот вариант применения не является ограничительным, и заявленный способ можно применять в другой электромеханической приводной системе, такой как электромеханическая приводная система, связанная с капотом реверса тяги летательного аппарата, с закрылком или с рулем.
В данном случае электромеханическая приводная система 1 содержит электрическую часть 10, включающую в себя инвертор 11 и двигатель 12, питаемый через инвертор 11. Двигатель 12 является в данном случае синхронным двигателем с постоянными магнитами. Кроме того, электромеханическая приводная система 1 содержит механическую часть 12, включающую в себя двигатель 12, а также привод 21, который соединен, с одной стороны, с выходным валом двигателя 12 и, с другой стороны, с элероном А для обеспечения перемещения элерона А. В данном примере привод 21 является приводом линейного типа и содержит, например, домкрат типа шарикового винта или домкрат типа роликового винта. В варианте привод может быть приводом вращающегося типа. Когда двигатель 12 получает питание, он приводит в действие привод 21, который, в свою очередь, перемещает соответствующий элерон А.
Таким образом, заявленный способ позволяет контролировать эту электромеханическую приводную систему 1, что будет более подробно описано далее.
Поскольку питание двигателя 12 через инвертор 11 происходит при помощи трехфазного тока, моделирование электрической части 10 осуществляют в системе координат ротора (прямая ось и квадратурная ось), как показано на фиг. 3а и 3b. Таким образом, различные электрические величины, вычисляемые или измеряемые в рамках настоящего способа, проецируют на две первые оси двухфазной модели, а именно на ось D (прямая) и на ось Q (квадратурная). В дальнейшем тексте описания индекс D будет относиться к проекции величины на ось d, а индекс q - к проекции величины на ось Q.
Чтобы оценить величины падения напряжения питания двигателя 12, которые связаны с дефектами инвертора 11, на первом этапе 100 способа строят линейные, стационарные и стохастические фильтры Калмана непрерывного типа:


или дискретного типа:


Такая модель Калмана хорошо известна специалисту в данной области, поэтому ее подробное описание опускается. Для более подробной информации можно, например, обратиться к книге “Stochastic Models, Estimation and Control”, Volume 141-1, Mathematics in Science and Engineering, P.S. Maybeck.
Для применения оценочной схемы Калмана рассматривают следующие уравнения синхронного двигателя 12 в системе координат ротора:


где: VD и VQ обозначают напряжение питания, которое должен выдавать инвертор 11 и которое называется управляющим напряжением (которое в данном случае измеряют в контуре регулирования тока инвертора 11), 



Данные iD, iQ, VD, VQ и ω являются рабочими данными, которые измеряют при помощи датчиков или получают из команд, передаваемых вычислительным устройством в инвертор 11 во время полета летательного аппарата, либо в реальном времени, либо сначала измеряют/получают, затем сохраняют в памяти (например, вычислительного устройства) для дальнейшего использования в рамках заявленного способа.
Прежде чем построить модель Калмана для оценки падений напряжения
Согласно первому предположению, падения напряжения
Согласно второму предположению, рассматривают следующие изменения переменных, обеспечивающие развязку:
Согласно третьему предположению, все условия схождения Калмана соблюдены. Для более подробной информации можно, например, обратиться к книге “Stochastic Models, Estimation and Control”, Volume 141-1, Mathematics in Science and Engineering, P.S. Maybeck.
Таким образом, конечную модель, позволяющую оценить падения напряжения


Таким образом, получают выражения состояния общей формы (1) и (2) для двух осей d и q при:


и для выходных матриц:

Таким образом, способ позволяет построить две модели Калмана для электромеханической приводной системы 1 по оси d и по оси q, которые следует обрабатывать независимо.
Для этих двух моделей Калмана константы R, LQ и LD, и Ke являются теоретическими значениями. Погрешности в этих значениях считаются внешней помехой, которая уже была учтена в этих двух моделях Калмана. Например, чтобы задавать эти значения, можно отталкиваться от данных изготовителя. Точно так же, р известно, например, из данных изготовителя.
После построения двух моделей Калмана способ содержит второй этап 200, на котором определяют состояние x(t) этих двух моделей через фильтры Калмана.
Для этого в данном случае дискретизируют вышеупомянутые две модели.
Такая дискретизация модели Калмана и применение алгоритма Калмана к этой дискретизированной модели хорошо известны специалисту в данной области, и их подробное описание опускается. Для более подробной информации о дискретизации двух моделей Калмана и о рекуррентных уравнениях алгоритма Калмана можно, например, обратиться к книге “Stochastic Models, Estimation and Control”, Volume 141-1, Mathematics in Science and Engineering, P.S. Maybeck.
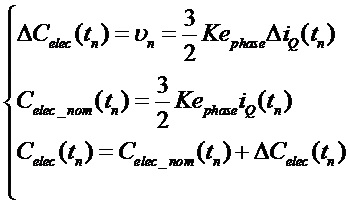
Таким образом, алгоритм Калмана, который сам по себе известен и который применяют к двум дискретизированным моделям Калмана, позволяет получить оценку x(t) и, следовательно, падение напряжения
В этой связи можно напомнить, что приведенные выше электрические уравнения (3) можно записать с реальными параметрами в следующем виде:
При этом предполагается, что 
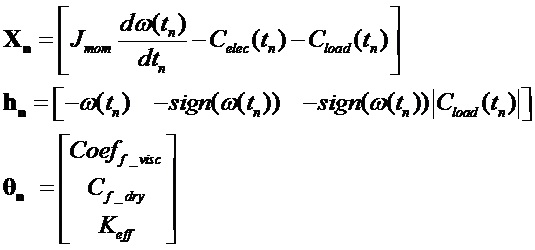
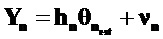
Отталкиваясь от этого предположения и от системы уравнений (4) получают следующую систему линейных уравнений (5), соответствующую n-ым измерениям, произведенным и используемым в рамках способа (сила тока, выдаваемого инвертором 11 на двигатель 12, управляющее напряжение и скорость вращения выходного вала двигателя 12):

которую можно также записать в виде 
Однако, как уже было указано выше, измерения, осуществляемые и используемые электромеханической приводной системой 1, чаще всего оказываются зашумленными. Чтобы сделать систему уравнений (5) более реальной, учитывая эти погрешности в измерениях, в эту систему уравнений вводят вектор vn, соответствующий не искаженному белому шуму, что дает:
где:
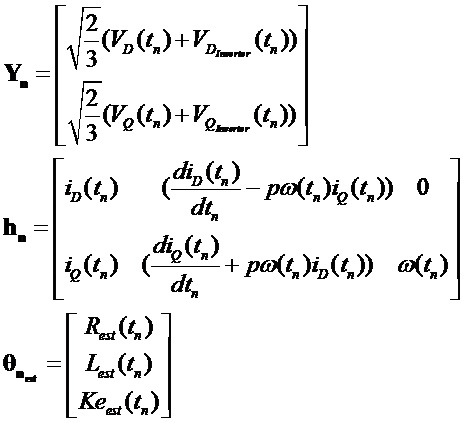
Зная, что данные 
Это определение в данном случае осуществляют посредством стохастического вычисления. В частности, это определение осуществляют при помощи рекурсивного алгоритма наименьших квадратов, позволяющего находить 
Такой алгоритм хорошо известен специалисту в данной области, и его подробное описание опускается. Для более подробной информации можно, например, обратиться к книге “Stochastic Models, Estimation and Control”, Volume 141-1, Mathematics in Science and Engineering, P.S. Maybeck.
Это позволяет оценить коэффициент электромагнитного момента двигателя Keest, сопротивление двигателя Rest и индуктивность двигателя Lest. Это позволяет контролировать состояние электромеханической приводной системы 1 при помощи известных закономерностей износа указанной системы и этих оценочных параметров и/или предусмотреть профилактические операции технического обслуживания во время следующего пребывания летательного аппарата на земле.
После оценки коэффициента Keest электромагнитного момента двигателя способ содержит четвертый этап 400, на котором вычисляют электромагнитный момент Celec двигателя при помощи следующей формулы:
где 
Предпочтительно способ содержит пятый этап 500 оценки нескольких механических параметров, связанных с электромеханической приводной системой 1, а именно: коэффициента вязкого трения Coeff-visc механической части 20, момента динамического сухого трения Cf-dry механической части 20, прямого КПД ρdirect механической части 20 (то есть КПД, когда нагрузка, связанная с двигателем, противодействует движению выходного вала двигателя, в отличие от опосредованного КПД ρindirect, который соответствует КПД, когда нагрузка, связанная с двигателем, сопровождает движение выходного вала двигателя, при этом отношение между прямым КПД и опосредованным КПД имеет следующий вид:
В связи с этим основной принцип динамики в применении к выходному валу двигателя 12 дает:

при 
Можно записать:

Получают следующее линейное уравнение, соответствующее n-ым измерениям, произведеным и используемым в рамках способа:


Однако, как уже было указано выше, производимые измерения, используемые электромеханической приводной системой 1, чаще всего оказываются зашумленными. Таким образом, учитывая ошибку в измерении тока 
При этом получают следующее уравнение:
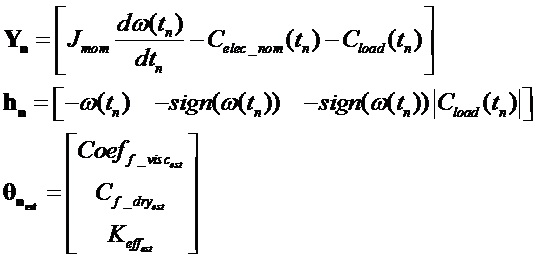
В этом примере угловое ускорение 

Это определение в данном случае осуществляют посредством стохастического вычисления. В частности, это определение осуществляют при помощи рекурсивного алгоритма наименьших квадратов, позволяющего находить θn с минимизацией критерия
Кроме того, следует напомнить, что алгоритм должен учитывать то, что предыдущее уравнение можно применять, только если скорость вращения двигателя 12 не равна нулю. При этом оценочные параметры в алгоритме зафиксированы по последнему значению, когда скорость вращения двигателя 12 по абсолютной величине находится ниже определенного порога, который произвольно определяют как близкий к нулю. Предпочтительно этот порог регулируют таким образом, чтобы он оказывался как можно ближе к нулю по мере повышения точности фильтра Калмана.
Обозначив P матрицу автокорреляции погрешности оценки 
если 

по-другому,
если n=1 (исходные условия), то


по другому


Это позволяет оценить коэффициент вязкого трения Coeff-visc, момент динамического сухого трения Cf_dry и прямой КПД ρdirect. Это позволяет контролировать состояние электромеханической приводной системы 1 при помощи известных закономерностей износа указанной системы и этих оценочных параметров. Например, можно оценить износ электромеханической приводной системы 1 и/или предусмотреть профилактические операции технического обслуживания во время следующего пребывания летательного аппарата на земле.
Описанный выше способ позволяет оценить различные электрические и механические параметры, обеспечивающие контроль состояния электромеханической приводной системы 1. Как было указано выше, способ осуществляют во время реального полета летательного аппарата, а не во время специальных действий, предназначенных для оценки этих параметров, или при выводе летательного аппарата из эксплуатации.
Таким образом, способ можно осуществлять напрямую во время маневра летательного аппарата, требующего работы электромеханической приводной системы 1, или после завершения этого маневра, при этом различные измерения, необходимые для осуществления способа, записывают в ходе маневра, и они могут быть использованы в рамках способа.
Таким образом, данные, полученные в рамках заявленного способа, позволяют разработать различные стратегии контроля и действий на электромеханической приводной системе 1. Например, способ может содержать дополнительный этап формирования базы данных, включающей в себя различные значения электрических и механических параметров, полученные посредством оценки в течение времени и в ходе различных полетов летательного аппарата. Эта база данных позволяет знать изменение различных электрических и механических параметров системы в течение времени. Эта база данных позволяет также облегчить контроль других электромеханических приводных систем.
Разумеется, изобретение не ограничивается описанным вариантом осуществления, и в него можно добавлять версии осуществления, не выходя за рамки изобретения, определенные в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2012 |
|
RU2543502C1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С СИНХРОННЫМ ДВИГАТЕЛЕМ БЕЗ ДАТЧИКА ПОЛОЖЕНИЯ РОТОРА | 2020 |
|
RU2746795C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕЛИНЕЙНЫМИ ДИНАМИЧЕСКИМИ ПРОЦЕССАМИ В ОДНОФАЗНЫХ ИНВЕРТОРАХ НАПРЯЖЕНИЯ С СИНУСОИДАЛЬНОЙ ДВУХПОЛЯРНОЙ РЕВЕРСИВНОЙ МОДУЛЯЦИЕЙ | 2020 |
|
RU2746798C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558959C2 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ОРБИТЫ И ОРИЕНТАЦИИ КОРПУСА КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ ПРИ ОТСУТСТВИИ АПРИОРНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2542599C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ РЕЛЬСОВОГО ПУТИ И ПОДВИЖНОГО СОСТАВА | 2011 |
|
RU2487809C2 |
| РАВНОВЕСНЫЙ ЛОКАЛЬНО-ТЕРМОДИНАМИЧЕСКИЙ ПРОНИЦАЕМЫЙ ТЕПЛОВОЙ ИЗЛУЧАТЕЛЬ С ВЫРОВНЕННЫМ РАСПРЕДЕЛЕНИЕМ ПОТЕНЦИАЛОВ В ПРОСТРАНСТВЕ | 2011 |
|
RU2496062C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СИНХРОННОЙ МАШИНОЙ С ПОСТОЯННЫМИ МАГНИТАМИ | 2010 |
|
RU2561879C2 |
| СПОСОБ ИНДУКЦИОННОГО НАГРЕВА, ПРИМЕНЯЕМЫЙ В УСТРОЙСТВЕ, СОДЕРЖАЩЕМ МАГНИТОСВЯЗАННЫЕ ИНДУКТОРЫ | 2010 |
|
RU2525851C2 |
Изобретение относится к способу контроля электромеханической приводной системы, содержащей инвертор, двигатель и привод. Для контроля электромеханической системы оценивают определенным образом падение напряжения питания двигателя, связанное с дефектами инвертора, оценивают коэффициент электромагнитного момента двигателя с учетом оценочного падения напряжения и рабочих данных, вычисляют электромагнитный момент двигателя на основании коэффициента электромагнитного момента и рабочих данных определенным образом. Обеспечивается уменьшение массы и габаритов при измерении электромагнитного момента электромеханической приводной системы. 4 з.п. ф-лы, 4 ил.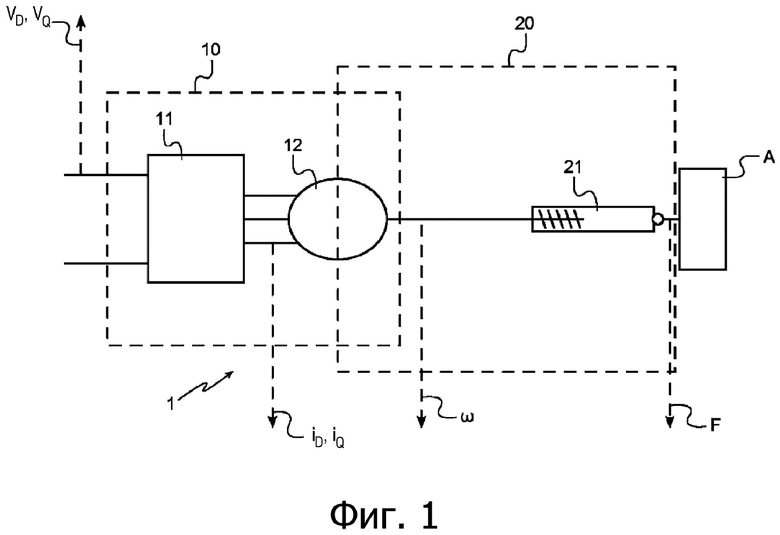
1. Способ контроля электромеханической приводной системы (1), содержащей по меньшей мере один инвертор (11), двигатель (12), питаемый через инвертор, и привод (21), приводимый в действие двигателем, содержащий этапы, на которых:
оценивают (100, 200) падение напряжения питания двигателя, связанное с дефектами инвертора, при помощи фильтра Калмана, учитывающего рабочие данные, включающие по меньшей мере силу тока, подаваемого инвертором на двигатель, управляющее напряжение инвертора и скорость вращения выходного вала двигателя,
оценивают (300) по меньшей мере коэффициент электромагнитного момента двигателя с учетом оценочного падения напряжения и рабочих данных, в том числе указанной силы тока, подаваемого инвертором на двигатель, указанного управляющего напряжения инвертора, а также отклонения силы тока, подаваемого инвертором на двигатель, и скорости вращения выходного вала двигателя,
вычисляют (400) электромагнитный момент двигателя на основании коэффициента электромагнитного момента двигателя и рабочих данных, которыми является сила тока, подаваемого инвертором на двигатель.
2. Способ по п. 1, в котором одновременно с коэффициентом электромагнитного момента двигателя оценивают другие электрические параметры электромеханической приводной системы (1).
3. Способ по п. 2, в котором другими оцениваемыми электрическими параметрами являются сопротивление двигателя и индуктивность двигателя.
4. Способ по одному из пп. 1-3, который содержит дополнительный этап (500), на котором оценивают по меньшей мере один механический параметр электромеханической приводной системы (1) на основании электромагнитного момента, рабочих данных, в том числе по меньшей мере скорости вращения выходного вала двигателя (12) и аэродинамической силы, действующей на привод (21).
5. Способ по п. 4, в котором механическим параметром является коэффициент вязкого трения, и/или момент динамического сухого трения, и/или КПД комплекса двигатель/привод.
| WO 2012133066 A1, 04.10.2012 | |||
| US 20050093501 A1, 05.05.2005 | |||
| FR 3013465 A1, 22.05.2015 | |||
| US 20150198209 A1, 16.07.2015 | |||
| КОМПЛЕКС ИЗ ПРИВОДОВ И СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ ОТ СЕТИ | 2009 |
|
RU2463212C1 |

