Область техники, к которой относится изобретение
Изобретение относится к устройству управления полетом летательного аппарата.
Уровень техники
Устройства управления полетом, используемые в летательных аппаратах, позволяют пилоту управлять ориентацией рулей управления крыла.
Традиционно летательные аппараты оснащены ручками управления, позволяющими пилоту приводить в действие закрылки и руль высоты, чтобы управлять положением летательного аппарата в полете вокруг продольной и поперечной осей. Ручка управления расположена между ногами пилота, который использует силу своих рук для приведения в действие ручки.
В некоторых самолетах, оснащенных электрическими приводами управления полетом, ручка управления заменена устройством управления полетом, называемым «мини-ручкой» (или “Side Stick Unit” на английском языке). Будучи более компактной, чем классическая ручка управления, мини-ручка обычно встроена в боковые части кабины пилота и содержит рычаг, который пилот приводит в действие только движением своей кисти. Установка мини-ручек позволила освободить пространство, находящееся между пилотом и приборной доской, чтобы установить в нем другое оборудование.
Из документа FR 3 011 815 известно устройство управления полетом для летательного аппарата, содержащее рычаг и корпус. Рычаг соединен с корпусом через механический соединительный узел, обеспечивающий поворот рычага относительно корпуса вокруг двух перпендикулярных осей вращения Х и Y. Поворот рычага относительно корпуса позволяет ориентировать рули для управления поперечными и продольными движениями летательного аппарата. Механический соединительный узел соединяет рычаг также с приводами, чтобы имитировать возвратное усилие во время поворота рычага.
В варианте выполнения, предложенном в этом документе, приводы являются коаксиальными.
Это позволяет расположить приводы под корпусом устройства управления и легче интегрировать устройство в окружающую среду кабины пилота (например, в боковую или центральную консоли или в подлокотник кресла пилота).
Раскрытие сущности изобретения
Изобретение призвано предложить устройство управления полетом с тремя осями вращения (позволяющее, например, управлять положением летательного аппарата в полете вокруг осей крена, тангажа и рысканья), которое можно легко интегрировать в окружающую среду кабины пилота.
Эта задача решается настоящим изобретением, объектом которого является устройство управления полетом летательного аппарата, содержащее:
- корпус,
- рычаг, установленный с возможностью вращения относительно корпуса вокруг центра вращения,
- первый приводной вал, второй приводной вал и третий приводной вал, при этом приводные валы установлены с возможностью вращения относительно корпуса вокруг одной и той же оси вращения,
- первую соединительную деталь, установленную с возможностью поворота, с одной стороны, на первом валу вокруг первой оси вращения и, с другой стороны, на рычаге вокруг четвертой оси вращения,
- вторую соединительную деталь, установленную с возможностью поворота, с одной стороны, на втором валу вокруг второй оси вращения и, с другой стороны, на рычаге вокруг пятой оси вращения,
- третью соединительную деталь, установленную с возможностью поворота, с одной стороны, на третьем валу вокруг третьей оси вращения и, с другой стороны, на рычаге вокруг шестой оси вращения,
в котором первая ось, вторая ось и третья ось вращения пересекаются в центре вращения рычага.
В таком устройстве приводные валы установлены с возможностью вращения относительно корпуса вокруг одной и той же оси вращения, что позволяет расположить двигатели на одной линии для создания возвратного усилия на приводных валах.
Кроме того, предложенное устройство позволяет управлять положением летательного аппарата в полете вокруг трех осей (крена, тангажа и рысканья). Это позволяет исключить рычаги ножного управления, которые классически обеспечивают управление положением летательного аппарата в полете вокруг оси рысканья.
Кроме того, устройство может иметь следующие отличительные признаки:
- первая ось, вторая ось и третья ось вращения образуют конусную поверхность вращения с углом при вершине, составляющим от 15 до 30 градусов,
- первая ось, вторая ось и третья ось вращения расположены с одинаковым угловым отклонением между двумя осями,
- четвертая, пятая и шестая оси вращения пересекаются в центре вращения рычага,
- четвертая, пятая и шестая оси вращения расположены в одной и той же плоскости,
- четвертая, пятая и шестая оси вращения распложены с угловым отклонением в 120 градусов относительно друг друга,
- первый приводной вал, второй приводной вал и третий приводной вал являются коаксиальными,
- устройство содержит первый двигатель для создания первого момента сопротивления на первом приводном валу, противодействующего приводному моменту, создаваемому на первом приводном валу пилотом, приводящим в действие рычаг, второй двигатель для создания второго момента сопротивления на втором приводном валу, противодействующего приводному моменту, создаваемому на втором приводном валу пилотом, и третий двигатель для создания третьего момента сопротивления на третьем приводном валу, противодействующего приводному моменту, создаваемому на третьем приводном валу пилотом,
- двигатели расположены в линию вдоль оси вращения первого приводного вала, второго приводного вала и третьего приводного вала.
Краткое описание чертежей
Другие отличительные признаки и преимущества будут более очевидны из нижеследующего описания, представленного исключительно в качестве иллюстративного и неограничивающего примера, со ссылками на прилагаемые чертежи.
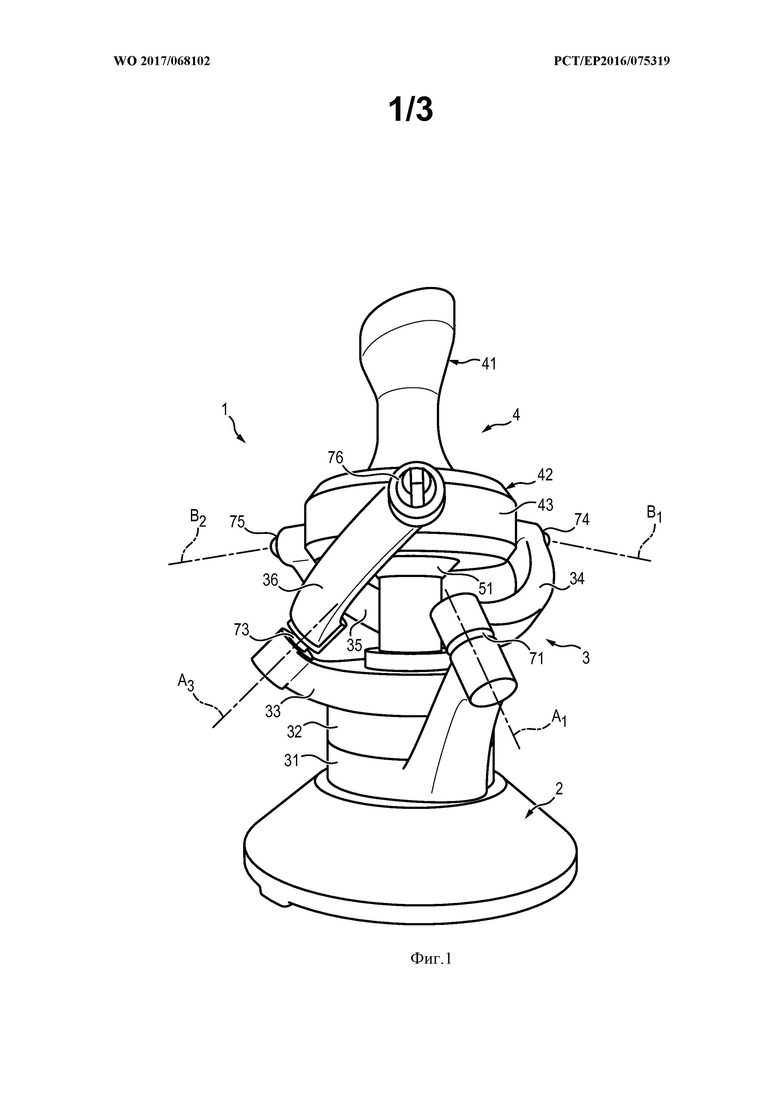
На фиг. 1 схематично показано устройство летательного аппарата согласно варианту осуществления изобретения;
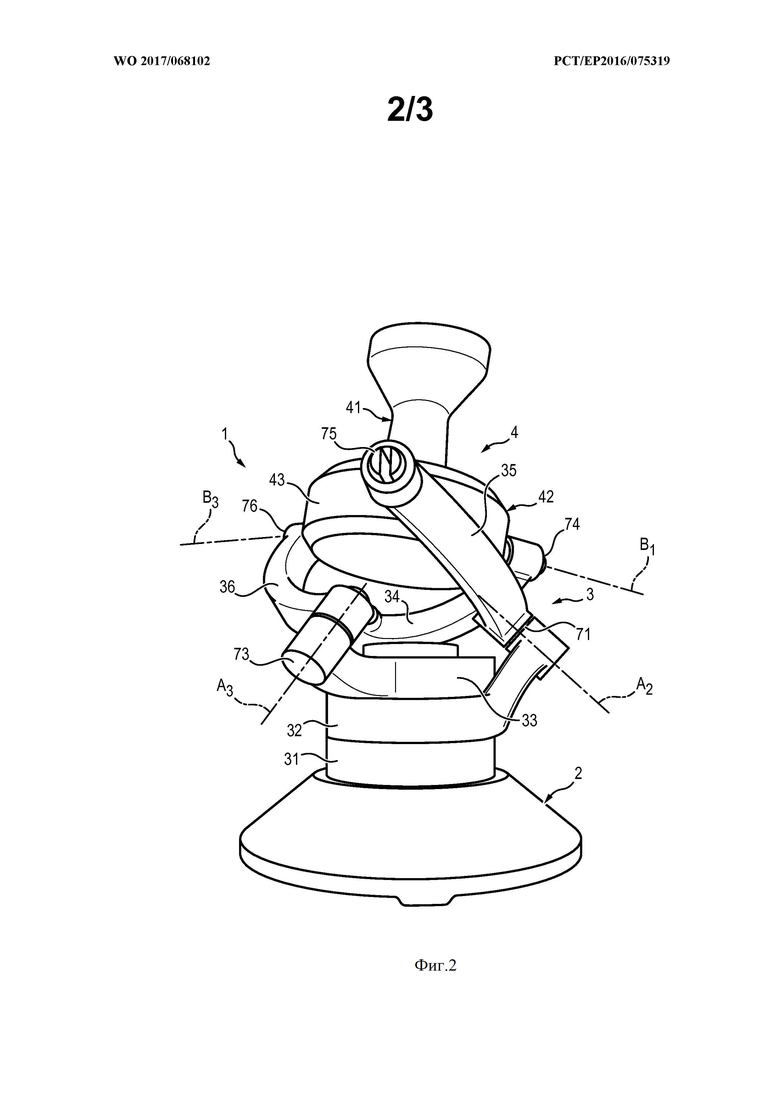
на фиг. 2 схематично показана версия устройства, изображенного на фиг. 1;
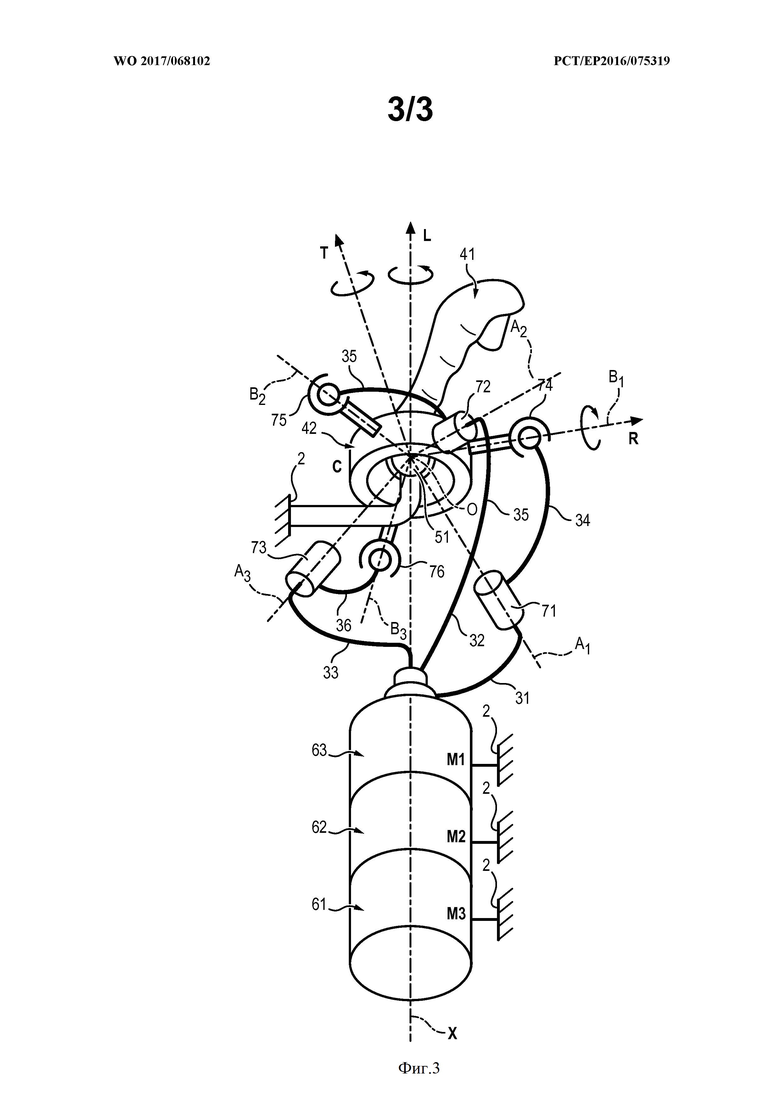
на фиг. 3 представлена кинематическая схема устройства, показанного на фиг. 1.
Осуществление изобретения
Показанное на фиг. 1 устройство 1 управления полетом содержит корпус 2, механический соединительный узел 3 и рычаг 4, установленный с возможностью вращения относительно корпуса 2.
Корпус 2 предназначен для установки в колонке кабины пилота или в подлокотнике кресла пилота.
Рычаг 4 содержит захватную часть 41, выполненную с возможностью удержания в руке пилота, и соединительную часть 42, позволяющую соединить рычаг 4 с механическим соединительным узлом 3. Рычаг 4 установлен с возможностью вращения относительно корпуса 2 вокруг трех осей вращения, а именно: оси R крена, оси Т тангажа и оси L рысканья самолета (оси R, Т и L показаны на фиг. 3).
Механический соединительный узел 3 допускает смещение рычага 4 примерно на 15-20 градусов вокруг продольной R и поперечной L осей).
В варианте осуществления, представленном на фиг. 1, устройство 1 дополнительно содержит центральную деталь 51, установленную неподвижно относительно корпуса 2 и имеющую сферическую наружную поверхность. Соединительная часть 42 рычага 4 содержит кольцо 43, имеющее внутреннюю сферическую поверхность. Кольцо 43 охватывает центральную часть 51. Сферические поверхности взаимодействуют между собой, образуя шаровой шарнир между рычагом 4 и корпусом 2. Таким образом, рычаг 4 связан с корпусом 2 через шаровой шарнир.
Механический соединительный узел 3 установлен внутри корпуса 2. Механический соединительный узел 3 позволяет, с одной стороны, связать рычаг 4 с корпусом 2, обеспечивая вращение рычага 4 относительно корпуса 2 вокруг трех осей вращения R, L и Т, и, с другой стороны, связать рычаг 4 с датчиками положения и с двигателями для создания возвратного усилия на рычаге 4 вокруг трех осей вращения.
Механический соединительный узел 3 содержит три приводных вала 31-33 и три соединительные детали 34-36.
В частности, механический узел 3 содержит первый приводной вал 31, второй приводной вал 32 и третий приводной вал 33. Каждый из приводных валов 31-33 установлен подвижно с возможностью вращения относительно корпуса 2. Приводные валы 31-33 выполнены с возможностью вращения вокруг общей оси вращения (оси Х, показанной на фиг. 3). Приводные валы 31-33 расположены коаксиально. Первый приводной вал 31 является трубчатым и окружает второй приводной вал 32. Второй приводной вал 32 тоже является трубчатым и окружает третий приводной вал 33. Таким образом, приводные валы 31-33 расположены коаксиально, заходя при этом друг в друга.
При использовании, когда устройство 1 установлено в колонке кабины пилота или в подлокотнике кресла пилота, ось вращения Х проходит в вертикальном направлении.
Механический соединительный узел 3 дополнительно содержит первую соединительную деталь 34, вторую соединительную деталь 35 и третью соединительную деталь 36.
Первая соединительная деталь 34 соединяет первый приводной вал 31 с рычагом 4. Первая соединительная деталь 34 установлена с возможностью поворота, с одной стороны, на первом валу 31 вокруг первой оси вращения А1 через поворотную связь 71 и, с другой стороны, на рычаге 4 вокруг четвертой оси вращения В1 через поворотную связь или шаровую опору 74.
Точно так же, вторая соединительная деталь 35 соединяет второй приводной вал 32 с рычагом 4. Вторая соединительная деталь 35 установлена с возможностью поворота, с одной стороны, на втором валу 32 вокруг второй оси вращения А2 через поворотную связь 72 и, с другой стороны, на рычаге 4 вокруг пятой оси вращения В2 через поворотную связь или шаровую опору 75.
Наконец, третья соединительная деталь 36 соединяет третий приводной вал 33 с рычагом 4. Третья соединительная деталь 36 установлена с возможностью поворота, с одной стороны, на третьем валу 33 вокруг третьей оси вращения А3 через поворотную связь 73 и, с другой стороны, на рычаге 4 вокруг шестой оси вращения В3 через поворотную связь или шаровую опору 76.
В частности, соединительные детали 34-36 установлены с возможностью вращения на соединительной части 42 рычага 4.
Поворотные связи 71-73 расположены таким образом, что первая ось А1, вторая ось А2 и третья ось А3 вращения образуют конусную поверхность вращения. Конусная поверхность вращения имеет угол при вершине, составляющий от 15 до 30 градусов. Кроме того, вершина конусной поверхности совпадает с центром вращения О рычага 4. Иначе говоря, первая ось А1, вторая ось А2 и третья ось А3 вращения пересекаются в центре вращения О рычага 4.
Точно также, четвертая ось В1, пятая ось В2 и шестая ось В3 вращения пересекаются в центре вращения О рычага 4. Кроме того, четвертая ось В1, пятая ось В2 и шестая ось В3 вращения расположены в одной плоскости.
Рычаг 4 находится в нейтральном положении, когда плоскость, в которой находятся четвертая, пятая и шестая оси В1-В3, расположена ортогонально к оси вращения Х приводных валов 31-33.
В нейтральном положении первая ось А1, вторая ось А2 и третья ось А3 вращения расположены с одинаковым угловым отклонением между двумя последовательными осями.
В версии устройства управления полетом, показанной на фиг. 2, устройство 1 не содержит центральной детали 51. Иначе говоря, шаровой шарнир между рычагом 4 и корпусом 2 отсутствует.
Работа устройства, показанного на фиг. 2, идентична работе устройства, показанного на фиг. 1.
Однако в устройстве, показанном на фиг. 1, шаровой шарнир делает гиперстатической механическую связь между рычагом 4 и корпусом 2, что позволяет повысить прочность устройства.
Как показано на фиг. 3, устройство 1 управления полетом содержит также три двигателя 61, 62 и 63.
В частности, устройство 1 управления полетом содержит первый двигатель 61 для приведения во вращение первого приводного вала 31 относительно корпуса 2, второй двигатель 62 для приведения во вращение второго приводного вала 32 относительно корпуса 2 и третий двигатель 63 для приведения во вращение третьего приводного вала 33 относительно корпуса 2 вокруг оси Х.
Первый двигатель 61, второй двигатель 62 и третий двигатель 63 выполнены с возможностью генерировать крутящий момент соответственно на первом приводном валу 31, на втором приводному валу 32 и на третьем приводном валу 33, чтобы создавать возвратное усилие на рычаге 4 через механический соединительный узел 3.
Как показано на фиг. 3, двигатели 61-63 расположены в линию вдоль оси Х приводных валов 31-33.
Устройство 1 может содержать датчики положения, предусмотренные для измерения углового положения каждого приводного вала 31-33. Каждый датчик положения может представлять собой инкрементный шифратор, содержащее вращающийся диск, установленный с возможностью вращения вместе с ротором соответствующего двигателя. Каждый датчик положения выполнен с возможностью генерировать сигнал положения, характеризующий угловое положение ротора относительно статора (то есть угловое положение приводного вала, с которым он соединен, относительно корпуса).
Сигналы положения передаются в вычислительное устройство управления полетом (FCC) летательного аппарата, чтобы управлять перемещением рулей управления полетом летательного аппарата.
Кроме того, вычислительное устройство управления полетом выполнено с возможностью управления двигателями 61-63 в зависимости от сигналов положения, которые оно получает от датчиков положения, чтобы генерировать возвратное усилие вокруг трех осей вращения T, R и L рычага 4.
Во время работы, если пилот не действует никаким усилием на рычаг 4, рычаг 4 остается в нейтральном положении.
Чтобы изменить положение рулей управления полетом, пилот может переместить рычаг 4 вокруг трех осей вращения T, R и L.
Перемещение рычага 4 вокруг этих трех осей приводит к повороту каждого из приводных валов 31-33 вокруг оси вращения Х. Иначе говоря, механический соединительный узел 3 преобразует вращение рычага 3 вокруг трех осей T, R и L в три вращения приводных валов вокруг оси Х
Каждый датчик положения генерирует сигнал положения, характеризующий угловое положение соединенного с ним приводного вала.
Сигналы положения передаются в вычислительное устройство управления полетом (FCC) летательного аппарата, которое управляет перемещением рулей управления полетом летательного аппарата в зависимости от этих сигналов положения.
Вычислительное устройство управления полетом генерирует также командные сигналы для управления каждым из двигателей 61-63 в зависимости от получаемых им сигналов положения. Командные сигналы определены в соответствии с правилом управления таким образом, чтобы создавать возвратное усилие вокруг трех осей вращения T, R и L рычага.
В таком устройстве возвратное усилие, создаваемое на каждой из осей T, R и L, представляет собой комбинацию моментов, создаваемых двигателями 61-63.
Устройство (1) управления полетом летательного аппарата содержит корпус (2), рычаг (4), установленный с возможностью вращения относительно корпуса (2) вокруг центра вращения (О), первый приводной вал (31), второй приводной вал (32) и третий приводной вал (33). Приводные валы (31-33) установлены с возможностью вращения относительно корпуса (2) вокруг одной оси вращения (Х). Первая соединительная деталь (34) установлена с возможностью поворота, с одной стороны, на первом валу (31) вокруг первой оси вращения (А1) и, с другой стороны, на рычаге (4) вокруг четвертой оси вращения (В1). Вторая соединительная деталь (35) установлена с возможностью поворота, с одной стороны, на втором валу (32) вокруг второй оси вращения (А2) и, с другой стороны, на рычаге (4) вокруг пятой оси вращения (В2). Третья соединительная деталь (36) установлена с возможностью поворота, с одной стороны, на третьем валу (33) вокруг третьей оси вращения (А3) и, с другой стороны, на рычаге (4) вокруг шестой оси вращения (В3). Первая ось (А1), вторая ось (А2) и третья ось (А3) вращения пересекаются в центре вращения (О) рычага (4). Изобретение направлено на повышение точности управления. 8 з.п. ф-лы, 3 ил.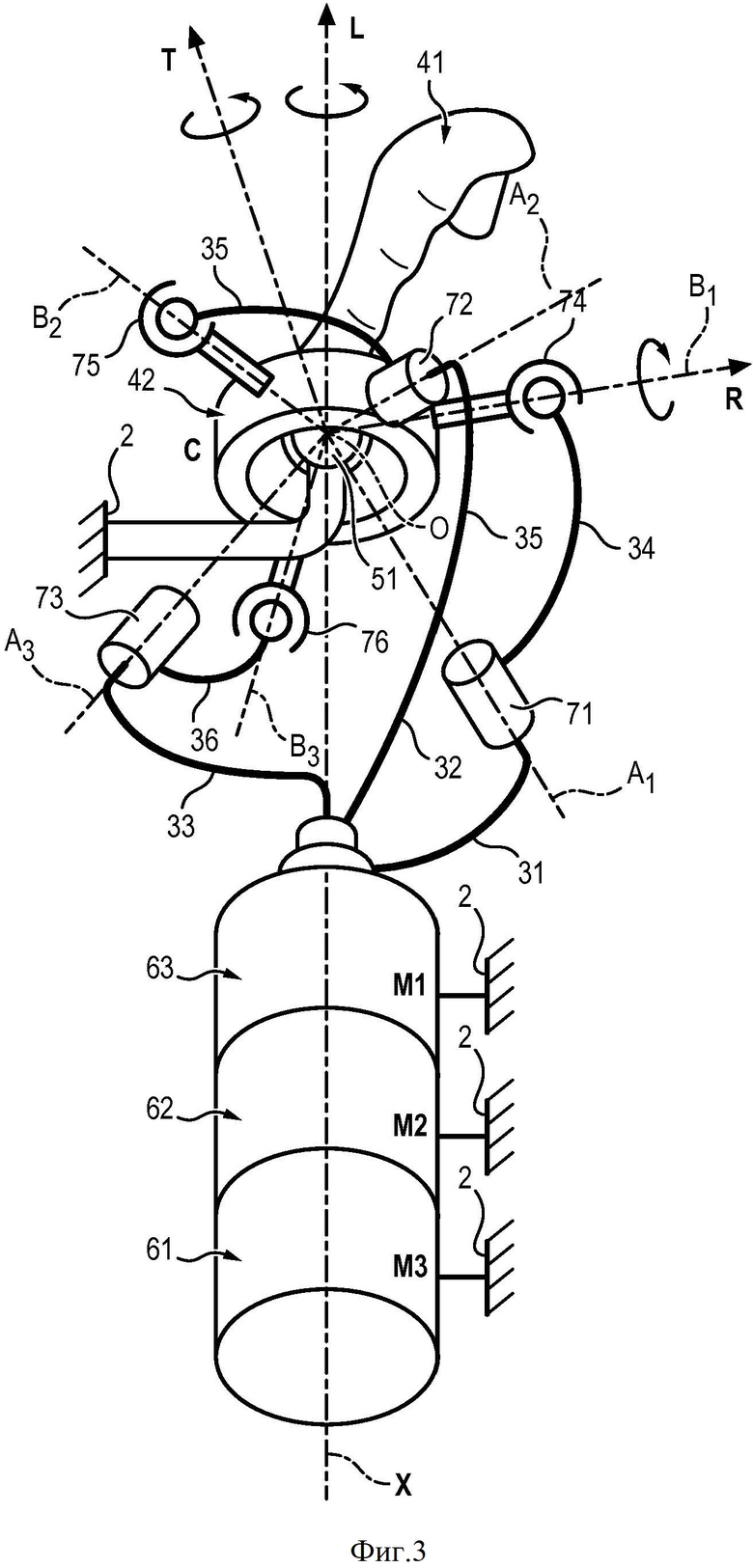
1. Устройство (1) управления полетом летательного аппарата, содержащее:
- корпус (2),
- рычаг (4), установленный с возможностью вращения относительно корпуса (2) вокруг центра вращения (О),
- первый приводной вал (31), второй приводной вал (32) и третий приводной вал (33), при этом приводные валы (31-33) установлены с возможностью вращения относительно корпуса (2) вокруг одной и той же оси вращения (Х),
- первую соединительную деталь (34), установленную с возможностью поворота, с одной стороны, на первом валу (31) вокруг первой оси вращения (А1) и, с другой стороны, на рычаге (4) вокруг четвертой оси вращения (В1),
- вторую соединительную деталь (35), установленную с возможностью поворота, с одной стороны, на втором валу (32) вокруг второй оси вращения (А2) и, с другой стороны, на рычаге (4) вокруг пятой оси вращения (В2),
- третью соединительную деталь (36), установленную с возможностью поворота, с одной стороны, на третьем валу (33) вокруг третьей оси вращения (А3) и, с другой стороны, на рычаге (4) вокруг шестой оси вращения (В3),
в котором первая ось (А1), вторая ось (А2) и третья ось (А3) вращения пересекаются в центре вращения (О) рычага (4).
2. Устройство по п. 1, в котором первая ось (А1), вторая ось (А2) и третья ось (А3) вращения образуют конусную поверхность вращения с углом при вершине, составляющим от 15 до 30 градусов.
3. Устройство по п. 2, в котором, когда рычаг (4) находится в нейтральном положении, в котором четвертая, пятая и шестая оси вращения (В1-В3) расположены ортогонально к оси вращения (Х) приводных валов (31-33), первая ось (А1), вторая ось (А2) и третья ось (А3) вращения расположены с одинаковым угловым отклонением между двумя осями.
4. Устройство по одному из пп. 1-3, в котором четвертая, пятая и шестая оси вращения (В1-В3) пересекаются в центре вращения (О) рычага (4).
5. Устройство по п. 4, в котором четвертая, пятая и шестая оси вращения (В1-В3) расположены в одной плоскости.
6. Устройство по одному из пп. 4 или 5, в котором четвертая, пятая и шестая оси вращения (В1-В3) распложены с угловым отклонением в 120 градусов относительно друг друга.
7. Устройство по одному из пп. 1-6, в котором первый приводной вал (31), второй приводной вал (32) и третий приводной вал (33) являются коаксиальными.
8. Устройство по одному из пп. 1-7, содержащее первый двигатель (61) для создания первого момента сопротивления на первом приводном валу (31), противодействующего приводному моменту, создаваемому на первом приводном валу пилотом, приводящим в действие рычаг (4), второй двигатель (62) для создания второго момента сопротивления на втором приводном валу (32), противодействующего приводному моменту, создаваемому на втором приводном валу пилотом, и третий двигатель (63) для создания третьего момента сопротивления на третьем приводном валу (33), противодействующего приводному моменту, создаваемому на третьем приводном валу пилотом.
9. Устройство по п. 8, в котором двигатели (61-63) расположены в линию вдоль оси вращения (Х) первого приводного вала (31), второго приводного вала (32) и третьего приводного вала (33).
| FR3011815 A1, 17.04.2015 | |||
| WO9504959 A1, 16.02.1995 | |||
| US3409252 A, 05.11.1968 | |||
| УСТРОЙСТВО СИГНАЛИЗАЦИИ ПОЛОЖЕНИЯ СТАБИЛИЗАТОРА ЛЕТАТЕЛЬНОГО АППАРАТА | 1985 |
|
SU1338264A1 |

