Изобретение относится к винтокрылым летательным аппаратам с двумя и более винтами и может быть использовано при создании высокоэкономичных беспилотных квадролетов с расширенными функциональными возможностями.
Известны многочисленные конструкции мультикоптеров, в частности квадролетов, как беспилотных, так и пилотируемых, решающих широкий круг народно-хозяйственных и военных задач (Завалов О.А., Маслов А.Д. Современные винтокрылые беспилотные летательные аппараты. Издательство: МАИ, 2008; http://multicopter.ru, http://bp-la.ru, www.uav.ru). Квадролеты содержат корпус и четыре двигателя с несущими винтами, расположенные диагонально на выносных балках корпуса. В корпусе размещены необходимые командные микропроцессорные средства управления, блоки питания. Полезная нагрузка в виде необходимого оборудования, определяющего назначение квадролета, как правило, вынесена за пределы корпуса и размещена на специализированных консолях.
Существенным для обеспечения функционального назначения квадролета является возможность управления в максимально возможном диапазоне ориентацией рабочего органа полезного оборудования, каковым могут быть объективы фото-, видеокамер, тепловизионного оборудования, детекторов радиоактивного излучения, лазерных измерителей расстояний и геометрических параметров наблюдаемых объектов, стволы стрелкового и направляющие ракетного вооружения и пр. Ориентация рабочего органа по линии наведения (для наблюдения, измерения, прицеливания и других задач) в известных квадролетах в режиме полета осуществляется изменением пространственного положения корпуса (фюзеляжа) и изменением направления самого рабочего органа оборудования относительно корпуса, в режиме висения - изменением направления рабочего органа относительно корпуса. В обоих случаях диапазон управления рабочим органом ограничен конструктивным устройством квадролета, определяющим ограничение свободы позиционирования фюзеляжа квадролета в пространстве при разных режимах полета, и устройством специализированных консолей для размещения оборудования.
Размещение полезного оборудования вне фюзеляжа квадролета создает угрозу неблагоприятного воздействия на него атмосферных явлений и существенно ухудшает аэродинамические характеристики квадролета, повышая его чувствительность к порывам ветра, переменных силы и направления. В то же время стационарное размещение оборудования в фюзеляже известных квадролетов еще более ограничивает диапазон управления его рабочим органом.
Конструктивное устройство известных квадролетов не обеспечивает возможность пространственной ориентации их фюзеляжа относительно направления тяги несущих винтов, что ухудшает возможность взлета и посадки на негоризонтальные поверхности и также ограничивает диапазон управления рабочим органом стационарного оборудования.
Известны летательные аппараты, содержащие два или четыре средства тяги - винтомоторные группы или движители с несущими винтами, соединенные посредством трансмиссий со стационарными двигателями, установленные с возможностью поворота на угол до 90° в направлении продольной оси фюзеляжа (пат. US 3037721, 1962 г.; EP 0808768, 1997 г.; пат. РФ 2389651, 2008 г.; пат. РФ 2448869, 2010 г.).
Известен аппарат вертикального взлета и посадки (пат. РФ 2458822, 2011 г.), два из четырех несущих винтов которого установлены с возможностью поворота на угол до 90° относительно продольной оси корпуса, а два - относительно поперечной оси как совместно, так и раздельно. При этом он содержит два дополнительных винта с лобовой и кормовой сторон корпуса, установленных в вертикальной плоскости также с возможностью раздельного друг от друга поворота к горизонтальной плоскости, а фюзеляж выполнен круглой формы или в виде эллипса с выпуклой верхней поверхностью и плоской нижней поверхностью для придания ему аэродинамических свойств.
Известен самолет вертикального взлета и посадки (пат. РФ 2278800, 4004 г.), содержащий два движителя с воздушными винтами изменяемого шага, соединенными между собой и со стационарным двигателем трансмиссией, установленные с возможностью поворота в продольном направлении на угол до 90°, и в поперечном направлении на угол до 8°.
Технические решения приведенных аналогов позволяют в некоторой степени устранить недостатки известных квадролетов, но в целом обеспечивают ограниченную возможность пространственной ориентации фюзеляжа летательного аппарата относительно траектории полета и наблюдаемого объекта, следовательно, и ориентацию рабочего органа полезного оборудования по линии наведения.
Наиболее близким к предлагаемому изобретению по совпадающим признакам является вертолет (пат. РФ 2263049, 2003 г.), содержащий корпус, двигатель с несущим винтом, расположенный на раме, рама установлена в корпусе с возможностью наклона плоскости несущего винта вперед и назад на угол до 20° и вправо и влево на угол до 35° в двух вертикальных перпендикулярных друг к другу плоскостях, одна из которых расположена в направлении полета.
Прототип в наибольшей степени по сравнению с аналогами обеспечивает возможность пространственной ориентации корпуса вертолета при разных режимах полета, тем не менее диапазон ориентации ограничен заданными углами наклона плоскости несущего винта, расширить которые при одновинтовой схеме вертолета практически невозможно.
Технический результат, на достижение которого направлено изобретение, заключается в обеспечении возможности изменять пространственную ориентацию корпуса квадролета со стационарным полезным оборудованием в неограниченном диапазоне независимо от траектории и режима движения, включая режимы взлета, висения, горизонтального и вертикального полета, посадки.
Технический результат достигается тем, что в квадролете, содержащем корпус с установленным в нем стационарным полезным оборудованием, четыре средства тяги с несущими винтами, каждое из которых расположено на раме, установленной на соответствующей выносной балке корпуса, средства тяги установлены с возможностью как совместного, так и раздельного друг от друга поворота в рамах на угол не менее 180°, а рамы с возможностью как совместного, так и раздельного поворота вокруг оси балок на угол 360°, при этом винты установлены с возможностью как совместного, так и раздельного друг от друга изменения силы и направления тяги.
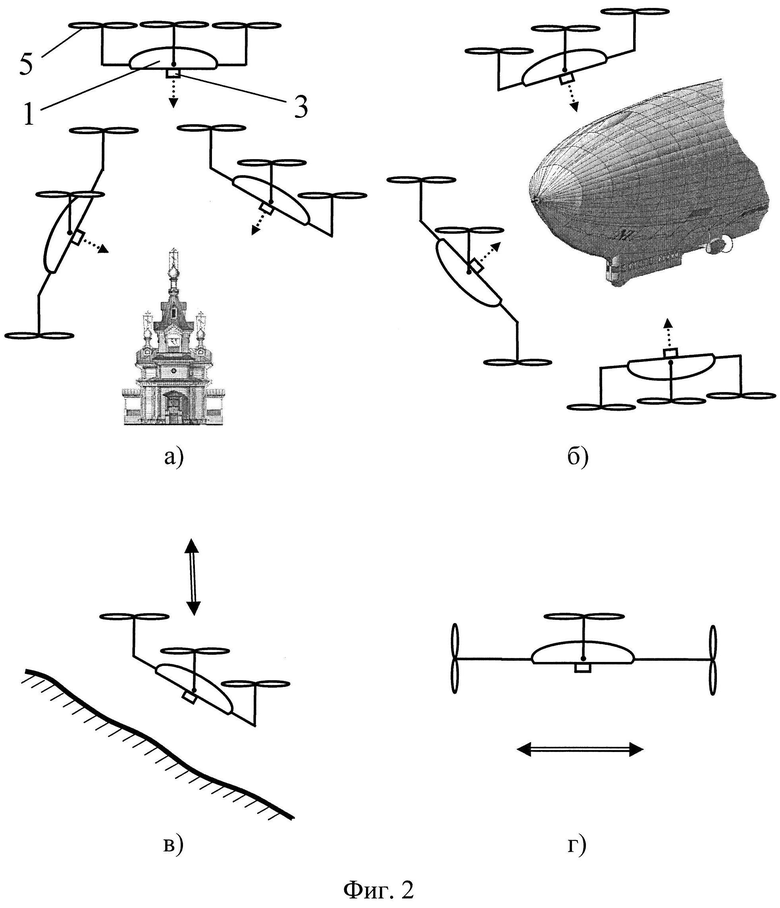
Сущность изобретения поясняется чертежами, где на фиг.1 представлена схема предлагаемого квадролета, на фиг.2 - схематично изображена ориентация корпуса квадролета относительно средств тяги при различных режимах полета: при облете а) - наземного объекта, б) - воздушного объекта, в) при взлете и посадке на негоризонтальную поверхность, г) при горизонтальном полете. На чертежах пунктирными стрелками обозначено направление наведения (наблюдения, измерения, прицеливания) рабочего органа полезного оборудования, сплошными стрелками обозначено направление поворота подвижных агрегатов квадролета, двойными сплошными стрелками обозначено направление движения квадролета.
Квадролет содержит корпус 1 с выносными балками 2, рабочий орган 3 полезного оборудования, размещенного в корпусе 1, средства тяги 4 с несущими винтами 5, расположенные в рамах 6.
Средства тяги 4 установлены на осях а-б в рамах 6 с возможностью поворота плоскости винтов 5 относительно рам на угол не менее 180°.
Рамы 6 установлены на выносных балках 2 корпуса 1 с возможностью поворота в перпендикулярной балкам плоскости на угол 360°.
Несущие винты 5 установлены на средствах тяги 4 с возможностью изменения скорости и направления вращения и (или) лопасти винтов 5 установлены с возможностью изменения их шага, в том числе на отрицательный.
Для поворота подвижных агрегатов квадролета - средств тяги 4, рам 6, лопастей несущих винтов 5 предусмотрены соответствующие механические, или серво-, или гидроприводы (на чертежах не показаны), конструкции которых известны (см., например, приведенные аналоги) и применяются на практике (см., например, Богданов Ю.С., Михеев Р.Л. Конструкция вертолетов. М.: Машиностроение, 1990; http://xaribda.ru/node/68). Согласованное совместное или раздельное управление положением подвижных агрегатов осуществляется с помощью известных командных систем управления (на чертежах не показаны, см. там же). Таким образом, принципиальная возможность осуществления заявленного технического решения обеспечена общеизвестными техническими средствами.
Квадролет работает следующим образом.
Согласованные поворот относительно корпуса 1 квадролета плоскостей несущих винтов 5 и изменение силы и направления вплоть до противоположенного их тяги обеспечивается координированным посредством командной системы управления поворотом средств тяги 4 в рамах 6, рам 6 вокруг балок 2 корпуса 1, изменением шага винтов 5 и (или) скорости и направления вращения винтов 5. Это создает суммарную составляющую векторов тяги каждого средства тяги 4, позволяющую совершать полет квадролета по любой заданной траектории и зависание при сохранении любой заданной пространственной ориентации корпуса 1, следовательно, при любой заданной линии наведения рабочего органа 3 полезного оборудования, стационарно установленного в корпусе.
Управление квадролетом по тангажу, рысканью, крену осуществляется как известными приемами для управления известными квадролетами - изменением силы тяги несущих винтов, так и с использованием новых возможностей, определяемых новыми конструктивными признаками предлагаемого устройства - изменением направления тяги несущих винтов за счет поворота плоскости винтов относительно корпуса.
На фиг.2а продемонстрировано изменение ориентации корпуса 1 квадролета относительно направления тяги несущих винтов 5 при заданном наведении рабочего органа 3 полезного оборудования на наземный объект во время его облета; на фиг.2б - при облете квадролетом воздушного объекта. Аналогична схема полета квадролета и при выполнении заданной работы внутри замкнутых объектов: помещений, объемных конструкций и пр.
В силу того, что предлагаемое устройство квадролета позволяет ему висеть и перемещаться при наклонном положении корпуса, облегчается возможность его взлета и посадки на негоризонтальную поверхность, как представлено на фиг.2в.
В режиме горизонтального полета, как представлено на фиг.2г, часть доли подъемной силы берет на себя корпус, если он выполнен в аэродинамической форме, что повышает экономичность и скорость квадролета при его перемещении от места базирования до места осуществления требуемой работы.
Таким образом, использование предлагаемого технического решения обеспечивает расширение функциональных возможностей квадролета за счет возможности изменения пространственной ориентации его корпуса в неограниченном диапазоне независимо от траектории и режима движения и повышает его экономичность при горизонтальном полете.
| название | год | авторы | номер документа |
|---|---|---|---|
| Летательный аппарат | 2016 |
|
RU2656932C2 |
| Автожир | 2018 |
|
RU2673933C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ГОРИЗОНТАЛЬНОГО ПОЛЁТА С ВЕРТИКАЛЬНЫМ ВЗЛЁТОМ И ПОСАДКОЙ И НЕСУЩАЯ ПЛАТФОРМА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА ГОРИЗОНТАЛЬНОГО ПОЛЁТА С ВЕРТИКАЛЬНЫМ ВЗЛЁТОМ И ПОСАДКОЙ | 2018 |
|
RU2693362C1 |
| ПРИВЯЗНОЙ ВОЗДУШНЫЙ ИМИТАТОР ВЕРТОЛЁТА | 2016 |
|
RU2622583C1 |
| Мультикоптер с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами | 2023 |
|
RU2831361C1 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |
Изобретение относится к авиационной технике, в частности к винтокрылым летательным аппаратам с двумя и более винтами. Квадролет содержит корпус с установленным в нем стационарным полезным оборудованием, четыре средства тяги с несущими винтами, каждое из которых расположено на раме, установленной на соответствующей выносной балке корпуса. Средства тяги установлены с возможностью как совместного, так и раздельного друг от друга поворота в рамах на угол не менее 180°, а рамы с возможностью как совместного, так и раздельного поворота вокруг оси балок на угол 360°, при этом винты установлены с возможностью как совместного, так и раздельного друг от друга изменения силы и направления тяги. Достигается возможность изменения пространственной ориентации корпуса квадролета независимо от траектории и режима движения, повышение экономичности при горизонтальном полете. 2 ил.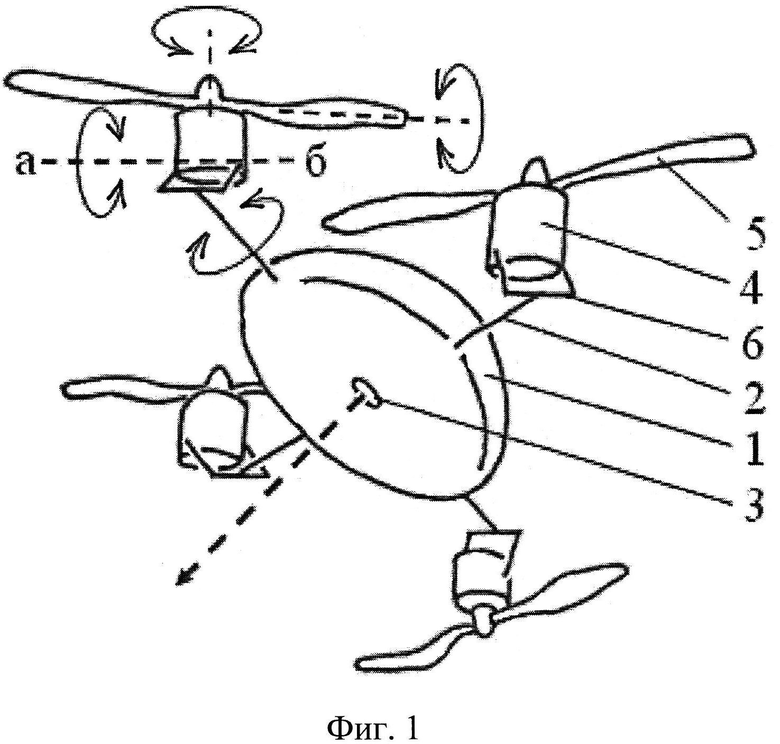
Квадролет, содержащий корпус с установленным в нем стационарным полезным оборудованием, четыре средства тяги с несущими винтами, каждое из которых расположено на раме, установленной на соответствующей выносной балке корпуса, отличающийся тем, что средства тяги установлены с возможностью как совместного, так и раздельного друг от друга поворота в рамах на угол не менее 180°, а рамы с возможностью как совместного, так и раздельного поворота вокруг оси балок на угол 360°, при этом винты установлены с возможностью как совместного, так и раздельного друг от друга изменения силы и направления тяги.
| KR 20120060590 A, 12.06.2012 | |||
| ВЕРТОЛЕТ | 2003 |
|
RU2263049C2 |
| US 2006016930 A1, 26.01.2006 | |||
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| US 8544788 B1, 01.10.2013 | |||

