Изобретение относится к способу управления подъемно-рихтовочным устройством перемещаемой по рельсам стрелочной шпалоподбивочной машины с подбивочным агрегатом, роликовыми клещами и по меньшей мере одним подъемным крюком, при этом подъемно-рихтовочное устройство установлено с возможностью продольного сдвига в продольном направлении машины. Дополнительно к этому, предлагается устройство для уплотнения щебеночного балластного слоя рельсового пути, в частности в зоне стрелки, с помощью стелочной шпалоподбивочной машины, которое снабжено подбивочным агрегатом и содержащим по меньшей мере одни роликовые клещи и по меньшей мере один подъемный крюк подъемно-рихтовочным устройством для выправления положения рельсового пути.
Стрелочные шпалоподбивочные машины являются машинами, которые выправляют положение рельсового пути стрелок. Для определения положения рельсового пути используют измерительные системы, которые измеряют фактическое положение рельсового пути по высоте, фактическое положение рельсового пути по направлению, а также фактическое положение рельсового пути по возвышению во время работы, и выравнивают с заданными номинальными значениями. С помощью подъемно-рихтовочного устройства рельсового пути рельсо-шпальная решетка поднимается и выравнивается в боковом направлении, пока разница между заданным номинальным положением и фактическим положением не будет равняться нулю. В этом положении стрелка фиксируется за счет уплотнения щебня под шпалами с помощью стрелочного шпалоподбивочного агрегата. При этом подъем и выравнивание рельсо-шпальной решетки происходит с помощью соответствующих гидравлических подъемных и рихтовочных цилиндров с пропорциональным или следящим управлением. Стрелки имеют в качестве особенности сквозной рельсовый путь и ответвляющийся рельсовый путь. С помощью так называемых остряков поезда направляются в ответвление или удерживаются на сквозном главном рельсовом пути. В точке пересечения сквозного рельсового пути и ответвляющегося рельсового пути лежит так называемая крестовина. В зоне крестовины железнодорожное колесо должно направляться с рельса сквозного рельсового пути на рельс ответвляющегося рельсового пути. Для того чтобы в зоне прерывания не направляемое колесо надежно катилось в ответвление или в сквозной главный рельсовый путь, предусмотрены направляющие рельсы. Для обеспечения возможности подбивки с помощью рабочих инструментов стрелочной шпалоподбивочной машины шпал стрелки во всех местах, подбивочные агрегаты установлены с возможностью бокового сдвига, и из-за косо лежащих длинных шпал предусмотрена возможность поворота подбивочных агрегатов. Подбивочные пики могут быть выполнены дополнительно с возможностью по меньшей мере частичного поворота.
В шпалоподбивочных машинах чисто рельсовых путей рельс захватывается за головку рельса с помощью роликовых клещей и поднимается в заданное геометрическое положение. На стрелках применение роликовых клещей из-за перекрещивающихся рельсов и на крестовине часто невозможно. Для обеспечения возможности обработки (выравнивания) также в этих местах дополнительно предусмотрены дополнительно выдвигаемые в стороны и переставляемые в глубине по высоте подъемные крюки.
Наряду со шпалоподбивочными машинами чисто для стрелок и шпалоподбивочными машинами чисто для перегонов имеются также универсальные машины, которые можно использовать как для зоны перегона, так и для зоны стрелки. В универсальных машинах часто выполняются две рабочие кабины. При этом кабина для подбивки стрелок лежит относительно своего направления обзора противоположно рабочему направлению. Из кабины для подбивки стрелок водитель машины управляет подбивочными агрегатами, пиками, он выбирает в зависимости от условий и по своему усмотрению роликовые клещи или подъемный крюк, соответственно, положение подъемного крюка, а также точку его зацепления на головке или подошве рельса. Подъемное приспособление можно также сдвигать в продольном направлении рельса. Это необходимо, когда подъемный крюк захватывает подошву рельса, что возможно лишь в зоне промежуточного зева, или когда за счет изолирующего стыка, например, роликовые клещи или подъемный крюк не может закрываться на головке рельса. Кабина для подбивки стрелки выбирается, прежде всего, за счет лучшего обзора подъемно-рихтовочного устройства стрелочной шпалоподбивочной машины. Кабина для подбивки перегона лежит относительно направления обзора в рабочем направлении.
При подбивке перегона подбивка осуществляется лишь с помощью роликовых клещей, поскольку нет таких препятствий, как у стрелки. При подбивке перегона, которая выполняется, как правило, с более высокими рабочими скоростями, важным является, прежде всего, обзор на подбивочные агрегаты, для того чтобы они погружались точно в промежуточный зев и не повреждали шпалы подбивочными инструментами (так называемыми подбивочными пиками). Из кабины для подбивки перегона имеется плохой обзор подъемного приспособления, поскольку подбивочные агрегаты ограничивают обзор. Недостатком выполнения двух рабочих кабин является значительно большие расходы на выполнение двух кабин, двух блоков управления, увеличенный вес и повышенная потребность в конструктивном пространстве. До настоящего времени при выполнении универсальной шпалоподбивочной машины лишь с одной рабочей кабиной (как правило, кабиной для подбивки перегона), обзор подъемного приспособления обеспечивается с помощью видеокамер. Однако видеокамеры могут лишь не достаточно заменять пространственный обзор. Установка вручную подъемного приспособления, выбор роликовых клещей или подъемного крюка, позиционирование подъемного крюка и точки приложения силы, а также сдвиг подъемного приспособления в продольном направлении рельсового пути требует времени. Известны также устройства для измерения пути или одометры или другие способы. Поскольку геометрическая форма рельсового пути относительно длины дуги рельсового пути является заданной, то необходимо измерять фактическое положение машины относительно километража рельсового пути.
Таким образом, в основу изобретения положена задача создания способа автоматического управления роликовыми клещами, а также подъемным крюком для подъема стрелок с помощью стрелочной шпалоподбивочной машины, с помощью которого может быть увеличена рабочая скорость и минимизирована подверженность ошибкам. Дополнительно к этому, можно обходиться лишь одной рабочей кабиной, за счет чего стрелочную шпалоподбивочную машину можно выполнять короче.
Задача решена, согласно изобретению, тем, что положение компонентов стрелки, таких как, в частности, приводные ящики стрелки, рельсы и крестовина, во время приближения стрелочной шпалоподбивочной машины с помощью расположенной в рабочем направлении перед подъемно-рихтовочным устройством установки для измерения компонентов стрелки в поперечном направлении рельсового пути измеряется в зависимости от места и промежуточно заносятся в память, что регистрируется положение рельсов и промежуточных зевов в рабочем направлении и промежуточно заносится в память, что зарегистрированные значения считываются для рабочего положения роликовых клещей и подъемного крюка, что на основании этих значений выполняется проверка возможности использования в этом рабочем положении роликовых клещей и, если использование роликовых клещей невозможно, на основании этих значений выполняется проверка возможности захвата головки рельса подъемным крюком, и если это снова невозможно, то осуществляется при необходимости смещение подъемного крюка в продольном направлении машины так, что подъемный крюк останавливается у подошвы рельса в промежуточном зеве, и что подъем выполняется после захвата рельса с помощью подъемно-рихтовочного устройства.
Согласно изобретению, положение компонентов стрелки регистрируется с помощью расположенной в рабочем направлении перед подъемно-рихтовочным устройством измеряющей компоненты стрелки установки и запоминается в зависимости от пути. Таким образом, делается любое количество практически одномерных моментальных замеров поперечного сечения рельсового пути на виде сверху и заносится в банк данных. Из внесенных данных можно создавать цифровое изображение рельсового пути и в данном случае, в частности, компонентов стрелки. Исходя из них, подъемно-рихтовочное устройство при необходимости автоматически перемещается в продольном направлении рельсового пути вдоль направляющей на раме машины, с целью занятия подходящей точки захвата для подъемно-рихтовочного инструмента. Дополнительно к этому, выбирается подходящий подъемно-рихтовочный инструмент в зависимости от измерительных значений измеряющей компоненты стрелки установки, т.е. делается выбор между роликовыми клещами и подъемным крюком и с помощью управления, соответственно, регулирования автоматически выбирается положение выдвижения подъемного крюка, а также точка захвата подъемным крюком на подошве или головке рельса. За счет этих мер можно отказаться от одной из обеих рабочих кабин. Автоматическое управление роликовыми клещами и подъемным крюком компенсирует плохой обзор роликовых клещей и подъемного крюка из кабины для подбивки перегона и повышает скорость работы. Для контролирования роликовых клещей и подъемного крюка можно дополнительно использовать видеосистему.
Согласно изобретению, положение компонентов рельсового пути, в частности компонентов стрелки (положение рельс, крестовины, усовиков, остряков стрелки, приводных ящиков для остряков стрелки и т.д.), относительно подъемно-рихтовочного устройства предварительно регистрируется в рабочем направлении в зависимости от пути. Регистрация этих компонентов из стали можно выполнять, например, с помощью ряда индуктивных или емкостных датчиков сближения, ультразвуковых датчиков или лазерного сканера (эквидистантного сканирования, например, каждые 5 см). Положение компонентов стрелки в зависимости от пути заносится в память и с помощью вычислительного устройства переносится со смещением по месту на положение роликовых клещей или подъемного крюка. При этом продвижение машины по пути измеряется с помощью измеряющего путь прибора, например одометра. Для соответствующего положения подъемно-рихтовочного устройства оцениваются предшествующие измерения. Если определяется, что нет достаточного места для манипулирования роликовыми клещами, то автоматически осуществляется переключение на подъемный крюк. В зависимости от предшествующих измерений и промежуточно внесенных в память данных о фактическом расположении подъемно-рихтовочного устройства выбирается положение выдвижения подъемного крюка и в качестве точки захвата сначала головка рельса. Посредством измерения положения выдвижения и пути закрывания подъемного крюка делается вывод, может ли быть головка надежно захвачена крюком или нет. Если путь закрывания является не достаточным, то крюк автоматически снова открывается. Если подъемный крюк находится не над промежуточным зевом, то подъемно-рихтовочное устройство сдвигается в продольном направлении рельсового пути, так что подъемный крюк находится над промежуточным зевом. В этом новом положении осуществляется попытка снова охватить головку рельса, если она не удачна (например, из-за наличия изолирующего стыка), то в качестве точки приложения силы выбирается подошва рельса. Если с помощью роликовых клещей не удается захватить головку рельса, то это может определяться посредством измерения пути гидравлического закрывающего цилиндра, тогда подъемно-рихтовочное устройство перемещается в продольном направлении рельсового пути в положение, в котором возможно закрывание. Если такое положение не получается, то автоматически осуществляется управление подъемным крюком с точкой захвата на подошве рельса. Измерительное приспособление регистрирует на стороне подъемных приспособлений (всегда снаружи рельса) положение компонентов стрелки в поперечном направлении рельсового пути, при этом в качестве исходной точки служит тот рельсовый путь, по которому едет стрелочная шпалоподбивочная машина и подъемно-рихтовочное устройство.
Из зарегистрированного с помощью измеряющей компоненты стрелки установки положения компонентов стрелки определяется положение захвата для подъемно-рихтовочной установки, и это положение захвата автоматически занимается перед закрыванием роликовых клещей или перед захватом рельса подъемным крюком, в частности, за счет поперечного сдвига, продольного сдвига и перестановки по глубине подъемно-рихтовочной установки.
Измеряющая компоненты стрелки установка регистрирует положение компонентов стрелки предпочтительно с помощью содержащей множество отдельных датчиков планки датчиков, которая проходит поперек продольного направления машины и расположена в рабочем направлении перед подъемно-рихтовочным устройством и снабжена рядом индуктивных датчиков и/или емкостных датчиков и/или измеряющих расстояние лазерных датчиков и/или ультразвуковых датчиков расстояния. Измеряющая компоненты стрелки установка может также измерять положение компонентов стрелки с помощью по меньшей мере одного лазерного сканера.
Устройство, согласно изобретению, для уплотнения щебеночного балластного слоя рельсового пути, в частности в зоне стрелки, с помощью стрелочной шпалоподбивочной машины, которое снабжено подбивочным агрегатом и содержащим по меньшей мере одни роликовые клещи и по меньшей мере один подъемный крюк подъемно-рихтовочным устройством для выправления положения рельсового пути и которое направляется с возможностью сдвига в продольном направлении машины на раме машины, отличается тем, что предусмотрена расположенная в рабочем направлении перед подъемно-рихтовочным устройством измеряющая компоненты стрелки установка для зависящего от места измерения положения компонентов стрелки. При этом для обеспечения возможности надежного занятия отдельных положений, соответственно, надежного захвата рельса, с подъемным крюком подъемно-рихтовочного устройства может быть согласован цилиндр для установки подъемного крюка по глубине с датчиком пути перестановки, с роликовыми клещами подъемно-рихтовочного устройства может быть согласован цилиндр закрывания роликовых клещей с датчиком пути закрывания, и с подъемно-рихтовочным устройством может быть согласован цилиндр поперечного сдвига с датчиком пути сдвига.
Особенно простая и стабильная измеряющая компоненты стрелки установка получается, когда она содержит содержащую предпочтительно множество отдельных датчиков планку датчиков, которая предусмотрена в стрелочной шпалоподбивочной машине с ориентацией поперек продольного направления машины. Для этого планка датчиков может содержать множество расположенных друг за другом в продольном направлении планки, т.е. последовательно/в ряд, отдельных датчиков. Согласно одному предпочтительному варианту выполнения изобретения, целесообразно, когда расположенные друг за другом в продольном направлении планки отдельные датчики расположены в два или больше проходящих рядом друг с другом рядов, при этом отдельные датчики соседних рядов датчиков предпочтительно смещены с образованием зазора. Измеряющая компоненты стрелки установка может содержать индуктивные датчики, емкостные датчики, лазерные датчики расстояния и/или ультразвуковые датчики расстояния, соответственно, при необходимости по меньшей мере один лазерный сканер.
На чертежах изображен в качестве примера предмет изобретения, а именно:
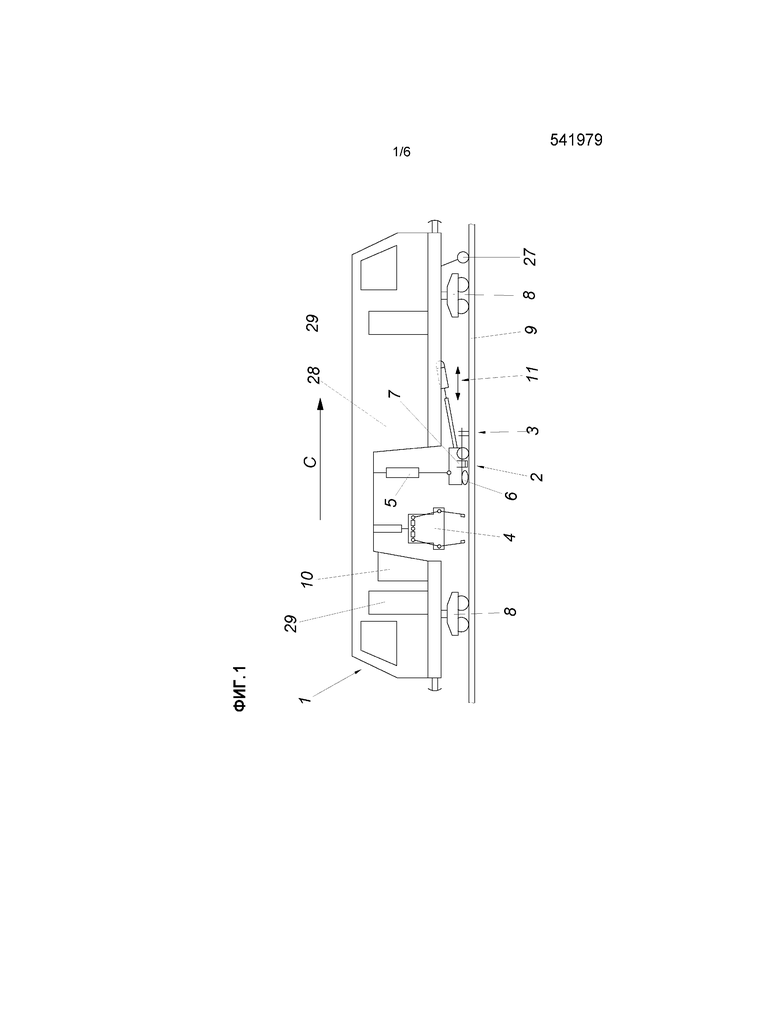
фиг.1 - рельсовая шпалоподбивочная машина, на виде сбоку;
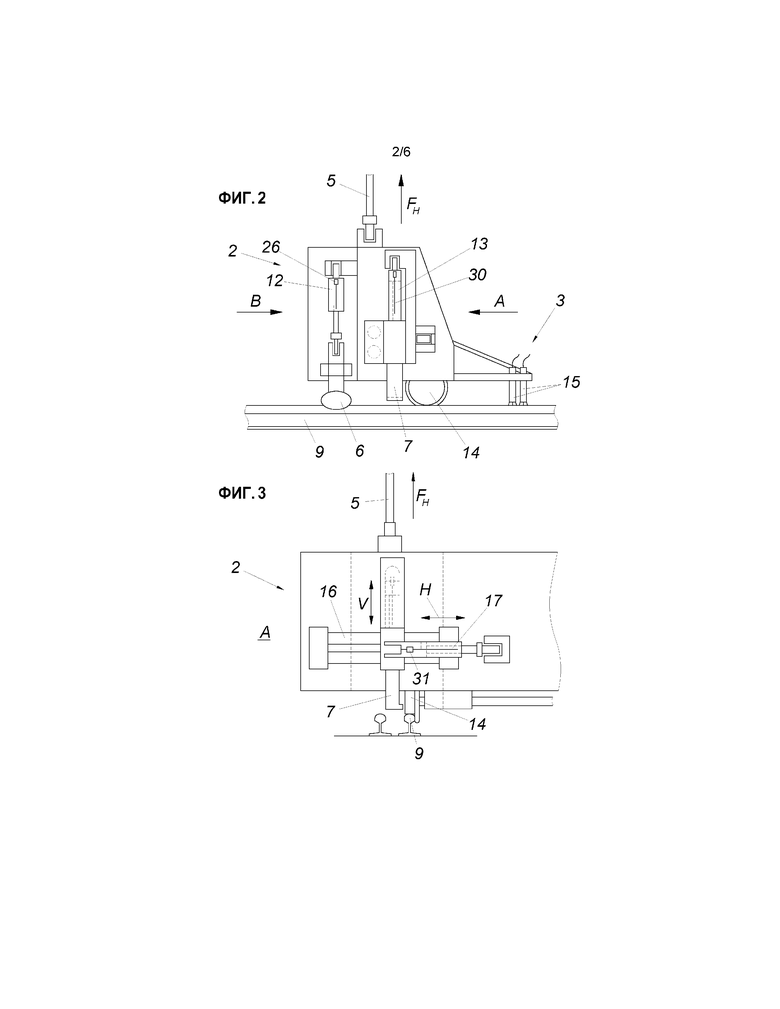
фиг.2 - подъемно-рихтовочное устройство, согласно изобретению, содержащее роликовые клещи и перемещаемый в поперечном направлении и переставляемый по глубине подъемный крюк, а также измерительное устройство для регистрации компонентов рельсового пути, на виде сбоку;
фиг.3 - подъемно-рихтовочное устройство с изображением перемещаемого в поперечном направлении и переставляемым по глубине подъемным крюком с регистрацией пути движений цилиндра, на виде спереди;
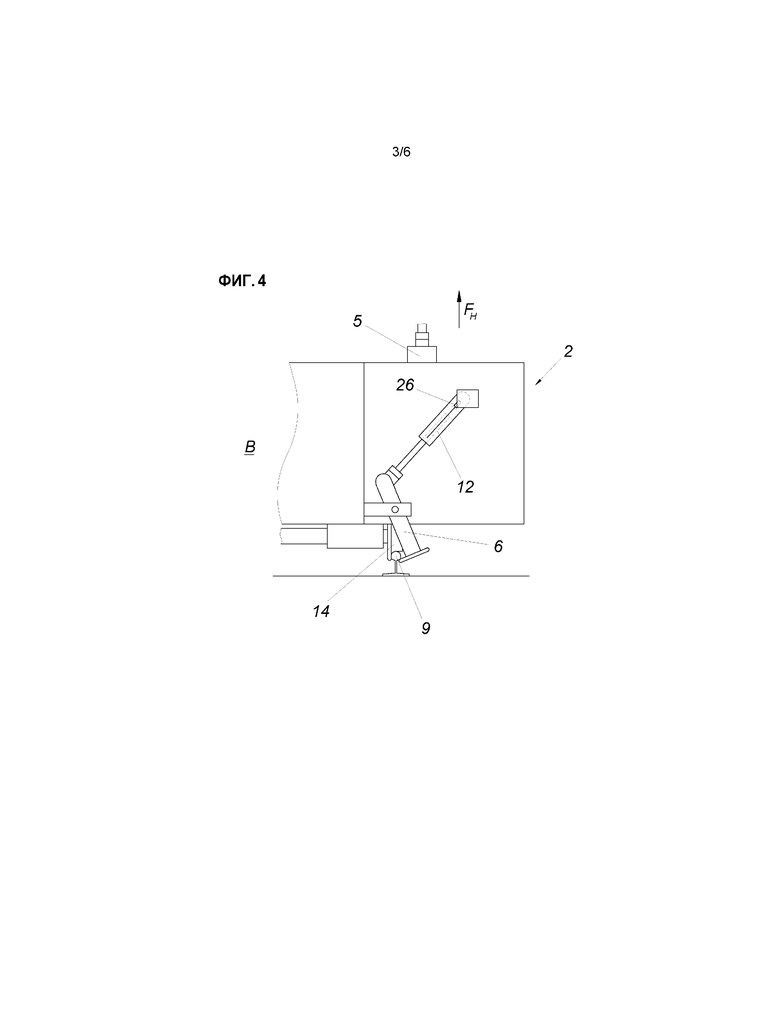
фиг.4 - роликовые клещи с регистрацией пути движения закрывания, на виде спереди;
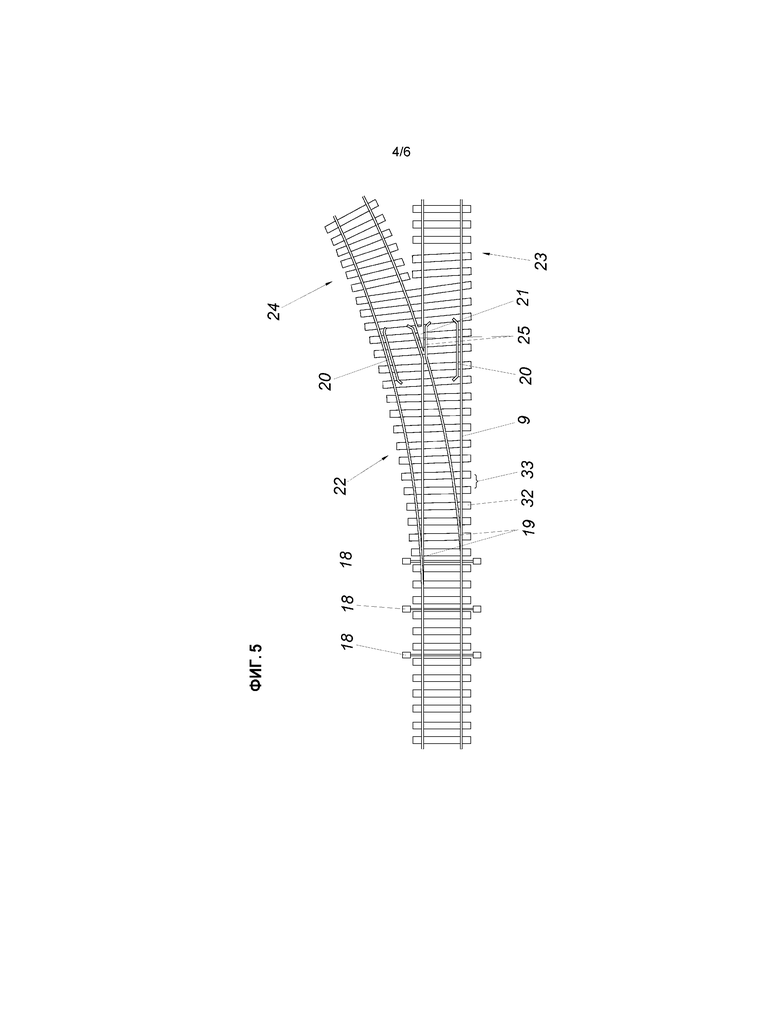
фиг.5 - стрелка с компонентами стрелки, такими как остряки, привод остряков, крестовина, усовики и направляющие рельсы, а также продольные шпалы, сквозной и ответвляющийся рельсовый путь, на виде сверху, и
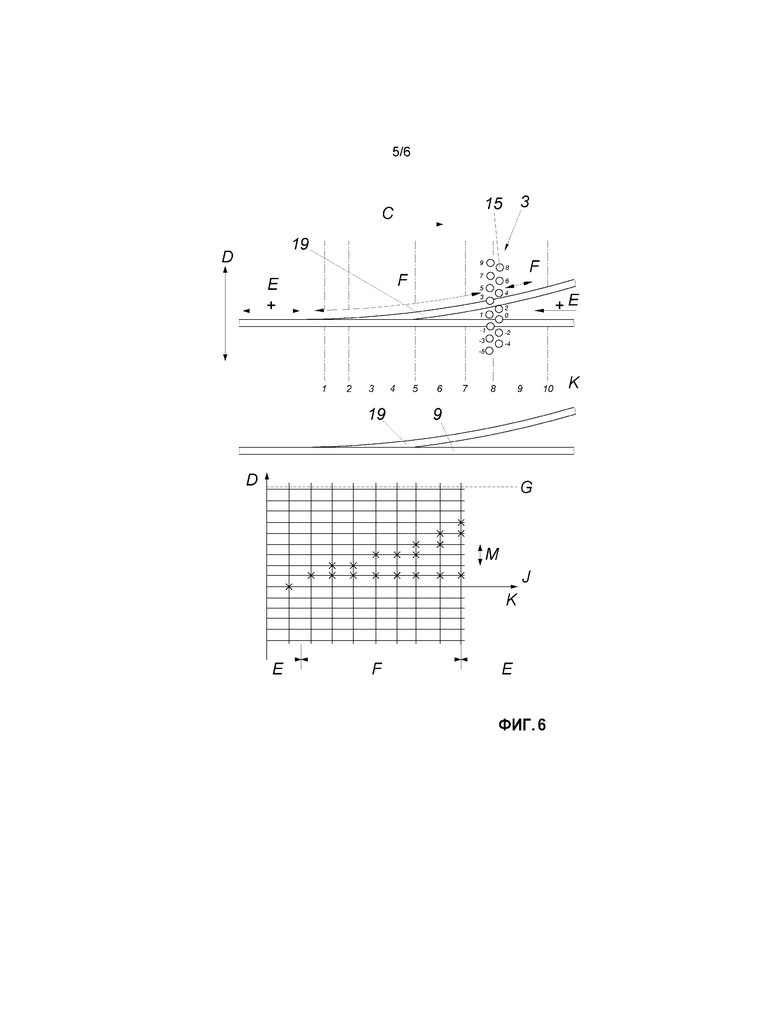
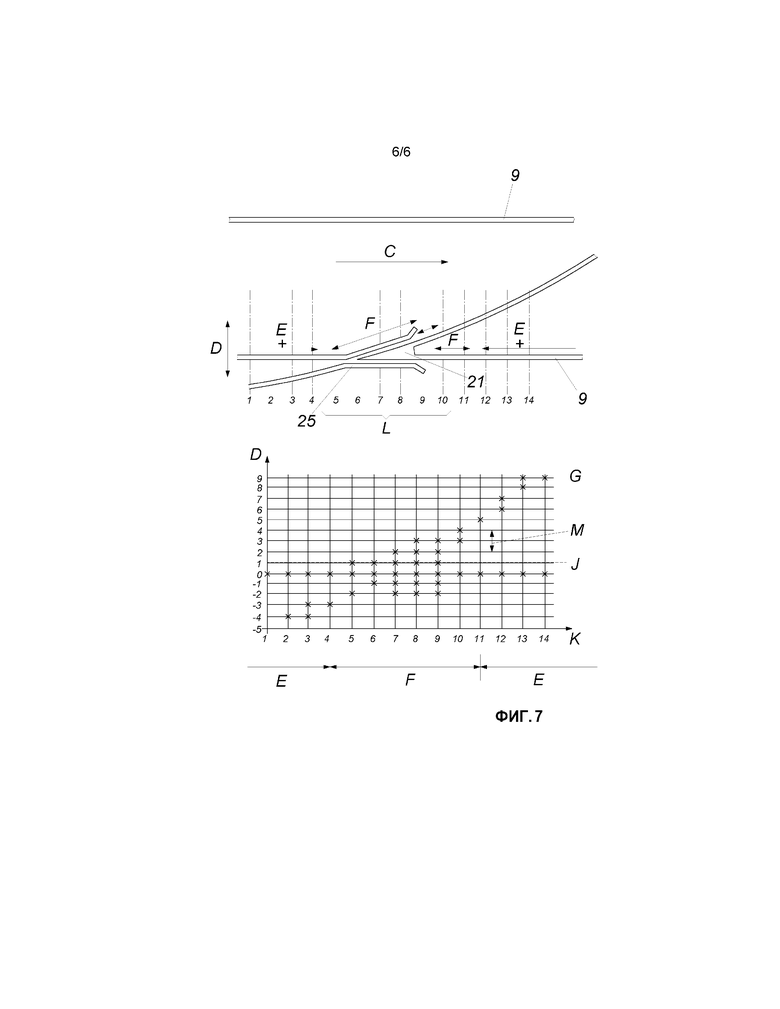
фиг.6 и 7 - соответствующая зона остряка стрелки, измерительное устройство для регистрации положения компонентов рельсового пути в поперечном направлении рельсового пути и в качестве примера занесенные в память измерительные данные такого измерительного устройства.
Стрелочная шпалоподбивочная машина 1 имеет подбивочный агрегат 4 и рельсоподъемно-рихтовочный агрегат 2 с подъемным цилиндром 5, роликовыми клещами 6, подъемным крюком 7 и измерительным устройством 3 (см. фиг.1). Подъемно-рихтовочный агрегат можно с помощью гидравлического цилиндра сдвигать в продольном направлении 11 рельсового пути. Стрелочная шпалоподбивочная машина посредством ходовой части 8 может перемещаться по рельсам 9. Управление стрелочной шпалоподбивочной машиной 1 осуществляется из расположенной в рабочем направлении С позади подбивочного агрегата 4 рабочей кабины 10. Через боковые двери 29 можно входить в рабочую кабину 10 и в кабины машиниста. Длина кривой рельсового пути определяется с помощью приспособления 27 измерения пути. Обычная в иных случаях вторая кабина 28 для подбивки стрелки может отсутствовать при выполнении, согласно изобретению. Измеряющая компоненты стрелки установка 3 для зависящего от места измерения положения компонентов стрелки расположена в рабочем направлении С перед подъемно-рихтовочным устройством 2.
Подъемно-рихтовочный агрегат (см. фиг.2) имеет роликовые клещи 6, закрывающий роликовые клещи цилиндр 12 с датчиком 26 пути закрывания, подъемный цилиндр 5 с подъемной силой FH, цилиндр 13 для установки крюка по глубине с датчиком 30 глубины для подъемного крюка, измеряющую компоненты стрелки установку 3 с датчиками 15 регистрации компонентов стрелки, подъемный крюк 7 и направляющее рихтовочное колесо 14. Подъемно-рихтовочный агрегат 2 направляется по рельсу 9 с помощью колес 14.
В показанном на фиг.3 на виде спереди подъемно-рихтовочном агрегате 2 показаны, в частности, направляющее приспособление 16 для поперечного сдвига подъемного крюка 7, цилиндр 17 для сдвига подъемного крюка с датчиком 31 пути перестановки, направляющее рихтовочное колесо 14, подъемный цилиндр 5 и направляющий рельс 9.
На показанном на фиг.4 виде подъемно-рихтовочного агрегата 2 показаны роликовые клещи 6, закрывающий роликовые клещи цилиндр 12 с датчиком 26 пути закрывания, подъемный цилиндр 5 с подъемной силой FH, направляющий рельс 9 и направляющее рихтовочное колесо 14.
На фиг.5 показана на виде сверху подлежащая выправлению стрелка 22 с существенными компонентами стрелки, а именно, приводами 18 остряков, остряками 19, направляющими рельсами 20, крестовиной 21, усовиками 25, сквозным главным рельсовым путем 23, шпалами 32, промежуточными зевами 33 и ответвляющимся рельсовым путем 24.
В верхней части на фиг.6 схематично показана зона 10 остряка. В поперечном направлении, т.е. поперек рабочего направления С, позицией D обозначено положение препятствий, при этом К соответствует рельсовому положению измеряющей компоненты стрелки установки 3, которая в показанном примере выполнения состоит из отдельных датчиков 15 регистрации компонентов стрелки. Датчики 15 регистрации компонентов стрелки расположены в два проходящих рядом друг с другом ряда, при этом отдельные датчики соседних рядов датчиков смещены с образованием зазора. Позицией 19 обозначен остряк, позицией 9 - сквозной рельс, позицией Е обозначена зона, в которой применяются роликовые клещи 6, позицией F обозначено то положение, в котором должен использоваться подъемный крюк 7. Позицией С обозначено рабочее направление. В нижней части фиг.6 показана вертикальная ось D положения препятствий и горизонтальная ось К рельсового положения, в котором находилось измерительное устройство 3 в момент измерения. Крестиками на графике обозначено, в каком из датчиков 15 расстояния активно обнаружен компонент стрелки. На графике показаны также граница G максимального выдвижения крюка и максимальная граница J для роликовых клещей при достаточном свободном пространстве для закрывания роликовых клещей 6. Позицией М обозначено необходимое свободное пространство, начиная с которого обеспечивается возможность использования роликовых клещей 6.
В верхней части на фиг.7 схематично показана зона L крестовины. В поперечном направлении показано положение D препятствий, К соответствует рельсовому положению измерительного устройства 3, которое в показанном примере выполнения состоит из отдельных датчиков 15 расстояния. Позицией Е обозначена зона, в которой применяются роликовые клещи 6, позицией F обозначено то положение, в котором должен использоваться подъемный крюк 7. Позицией С обозначено рабочее направление. В нижней части на фиг.7 показана вертикальная ось D положения препятствий и горизонтальная ось К показывает рельсовое положение, в котором находилось измерительное устройство 3 в момент измерения. Крестиками на графике показано, в каком из датчиков 15 расстояния активно обнаружен компонент стрелки. На графике показаны также граница G максимального выдвижения крюка и максимальная граница J для роликовых клещей при достаточном свободном пространстве для закрывания роликовых клещей 6. Позицией М обозначено необходимое свободное пространство, начиная с которого обеспечивается возможность использования роликовых клещей 6. Позицией 21 обозначена крестовина и позицией 25 - усовики.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДБИВОЧНАЯ МАШИНА ДЛЯ УПЛОТНЕНИЯ БАЛЛАСТНОГО СЛОЯ ПУТИ | 2016 |
|
RU2669658C1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА ДЛЯ УПЛОТНЕНИЯ ЩЕБЕНОЧНОГО БАЛЛАСТНОГО СЛОЯ РЕЛЬСОВОГО ПУТИ | 2015 |
|
RU2684882C2 |
| Передвижная выправочно-подбивочно-отделочная машина | 1990 |
|
SU1804521A3 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА | 2000 |
|
RU2193616C2 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА | 2006 |
|
RU2338823C2 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА И СПОСОБ ПОДБИВКИ РЕЛЬСОВОГО ПУТИ | 1994 |
|
RU2082847C1 |
| Подвижная шпалоподбивочная подъемная и рихтовочная машина | 1988 |
|
SU1799409A3 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2001 |
|
RU2195523C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА | 2000 |
|
RU2194111C2 |
| Машина для выправки железнодорожного пути | 1988 |
|
SU1540658A3 |
Изобретение относится к способу и устройству управления подъемно-рихтовочным устройством с помощью стрелочной шпалоподбивочной машины (1). Шпалоподбивочная машина (1) снабжена подбивочным агрегатом (4), содержащим одни роликовые клещи (6) и один подъемный крюк (7). Для создания предпочтительных условий для выправления предлагается, что предусмотрена расположенная в рабочем направлении (С) перед подъемно-рихтовочным устройством (2) измеряющая компоненты стрелки установка (3) для зависящего от места измерения места положения компонентов стрелки. Достигается повышение скорости работы и надежность. 2 н. и 9 з.п. ф-лы, 7 ил.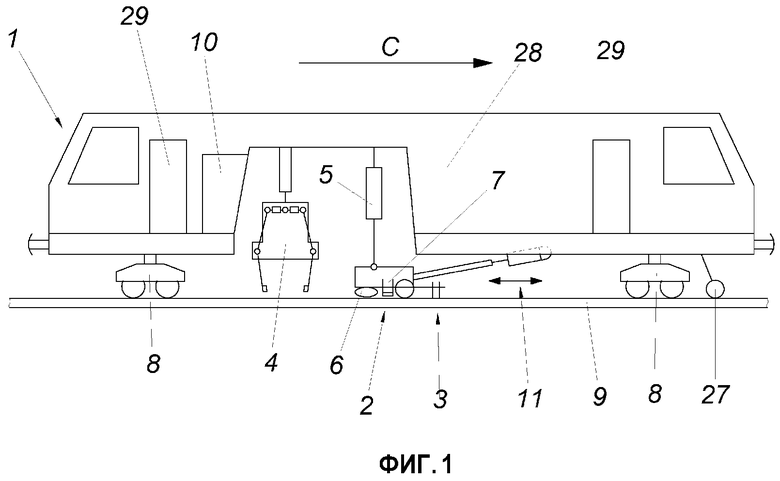
1. Способ управления подъемно-рихтовочным устройством, выполненный с возможностью (8) перемещения по рельсовому пути стрелочной шпалоподбивочной машины (1) с подбивочным агрегатом (4), по меньшей мере одними роликовыми клещами (6) и по меньшей мере одним подъемным крюком (7), при этом положение компонентов стрелки, таких как, в частности, ящики (18) привода стрелки, рельсы (9) и крестовина (21), во время подъезда стрелочной шпалоподбивочной машины (1) с помощью расположенной в рабочем направлении (С) перед подъемно-рихтовочным устройством (2) измеряющей компоненты стрелки установки (3) в поперечном направлении рельсового пути измеряют в зависимости от места и промежуточно заносят в память, и причем регистрируют положение шпал (32) и промежуточных зевов (33) в рабочем направлении (С) и промежуточно заносят в память, отличающийся тем, что подъемно-рихтовочное устройство (2) направляется с возможностью (11) продольного сдвига в продольном направлении машины,
причем из зарегистрированного с помощью измеряющей компоненты стрелки установки (3) положения компонентов (D, K) стрелки регистрируют положение захвата для подъемно-рихтовочного устройства (2), и
причем на основании этого положения захвата выполняют проверку возможности использования в этом рабочем положении роликовых клещей (6) или подъемного крюка (7) на головке рельса или подъемного крюка (7) на подошве рельса и это положение захвата автоматически занимают перед закрыванием роликовых клещей или перед захватом рельса подъемным крюком (7) за счет поперечного сдвига, продольного сдвига и перестановки по глубине подъемно-рихтовочного устройства (2), и
причем путь перестановки подъемного крюка (7) считывают с помощью датчика (30), а путь закрывания роликовых клещей (6) – с помощью датчика (26) пути закрывания, и
причем подъем выполняют после захвата рельса с помощью подъемно-рихтовочного устройства (2).
2. Способ по п.1, отличающийся тем, что измеряющая компоненты стрелки установка (3) регистрирует положение компонентов стрелки с помощью содержащей предпочтительно несколько отдельных датчиков (15) регистрации компонентов стрелки планки датчиков, которая расположена в рабочем направлении (С) перед подъемно-рихтовочным устройством с прохождением поперек продольного направления машины.
3. Способ по п.1 или 2, отличающийся тем, что измеряющая компоненты стрелки установка (3) регистрирует положение компонентов стрелки с помощью ряда индуктивных датчиков (15) и/или емкостных датчиков (15).
4. Способ по любому из пп.1-3, отличающийся тем, что измеряющая компоненты стрелки установка (3) регистрирует положение компонентов стрелки с помощью ряда лазерных датчиков (15) расстояния и/или ультразвуковых датчиков (15) расстояния.
5. Способ по любому из пп.1-3, отличающийся тем, что измеряющая компоненты стрелки установка (3) регистрирует положение компонентов стрелки с помощью по меньшей мере одного лазерного сканера.
6. Устройство для уплотнения щебеночного балластного слоя рельсового пути, в частности, в зоне стрелки, с помощью стрелочной шпалоподбивочной машины (1), которая снабжена подбивочным агрегатом (4) и имеет по меньшей мере одни роликовые клещи (6) и по меньшей мере один подъемный крюк (7) подъемно-рихтовочным устройством (2) для выправления положения рельсового пути, причем в рабочем направлении (С) перед подъемно-рихтовочным устройством (2) расположена измеряющая компоненты стрелки установка (3) для зависящего от положения места измерения положения компонентов стрелки,
отличающееся тем, что подъемно-рихтовочное устройство (2) установлено на раме (2) машины с возможностью продольного сдвига в продольном направлении машины, и
причем с подъемным крюком (7) подъемно-рихтовочного устройства (2) согласован цилиндр (13) для установки подъемного крюка по глубине с датчиком (30) пути перестановки, а с роликовыми клещами (6) подъемно-рихтовочного устройства (2) согласован цилиндр (12) закрывания роликовых клещей с датчиком (26) пути закрывания.
7. Устройство по п.6, отличающееся тем, что с подъемно-рихтовочным устройством (12) согласован цилиндр (17) поперечного сдвига с датчиком (31) пути сдвига.
8. Устройство по п.6 или 7, отличающееся тем, что расположенная в рабочем направлении (С) перед подъемно-рихтовочным устройством (2) измеряющая компоненты стрелки установка (3) содержит содержащую предпочтительно множество отдельных датчиков планку датчиков, которая предусмотрена в стрелочной шпалоподбивочной машине (1) с ориентацией поперек продольного направления машины.
9. Устройство по п.8, отличающееся тем, что планка датчиков содержит множество расположенных друг за другом в продольном направлении планки отдельных датчиков (15).
10. Устройство по п.9, отличающееся тем, что расположенные друг за другом в продольном направлении планки отдельные датчики (15) расположены в два или больше проходящих рядом друг с другом рядов, при этом при необходимости отдельные датчики соседних рядов датчиков предпочтительно смещены с образованием зазора.
11. Устройство по любому из пп.6-10, отличающееся тем, что измеряющая компоненты стрелки установка (3) содержит индуктивные датчики, емкостные датчики, лазерные датчики расстояния и/или ультразвуковые датчики расстояния, соответственно, при необходимости по меньшей мере один лазерный сканер.
| DE 3923733 A1, 02.08.1990 | |||
| Отрезной станок | 1975 |
|
SU536901A1 |
| DE2853529 A1, 15.11.1979 | |||
| РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ВЫПОЛНЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ РАБОТ | 1996 |
|
RU2109101C1 |
| Устройство управления выправкой железнодорожного пути | 1983 |
|
SU1116108A1 |

