Од
О 00
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выправки железнодорожного пути | 1980 |
|
SU927883A1 |
| Устройство управления рабочим органом для выправки положения пути | 1980 |
|
SU966130A1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| Устройство управления исполнительным органом машины для выправки пути | 1979 |
|
SU863744A1 |
| Устройство управления выправкой железнодорожного пути | 1981 |
|
SU1025774A1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2001 |
|
RU2212486C2 |
| Передвижная выправочно-подбивочная машина | 1983 |
|
SU1259963A3 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2098538C1 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, ПРОДОЛЬНОМ ПРОФИЛЕ И ПО УРОВНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2320801C1 |
УСТРОЙСТВО УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, содержащее по меньшей мере одну измерительную тележку, блок управления, включающий в себя датчик пройденного пути и датчик приращения положения пути и установленный на тележке датчик положения пути, связанный через блок управления с рабочим органом для выправки пути, отличающееся тем, что, с целью повышения надежности устройства и точности вьшравки пути, оно снабжено счетчиком импульсов от датчика пройденного пути и приводом датчика приращения положения пути, причем вход счетчика импульсов соединен с СЛ датчиком пройденного пути, а выход этого счетчика - с указанным приводом.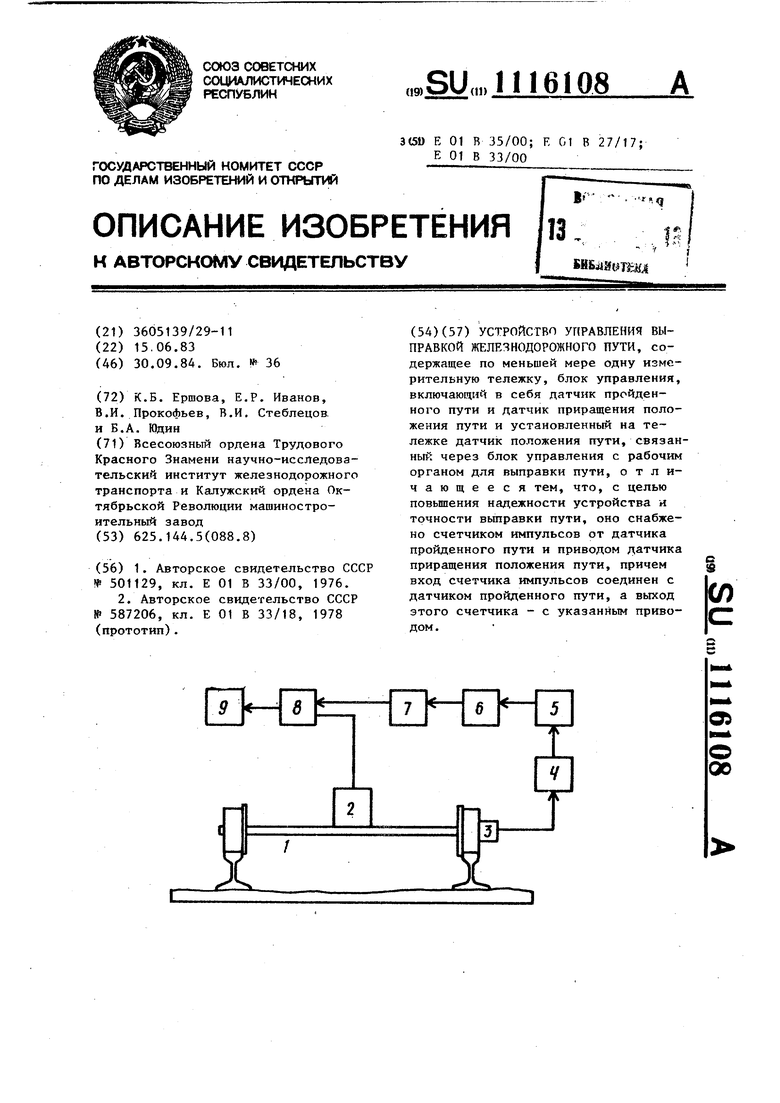
А
JL Изобретение относится к механизации и автоматизации работ по ремонту и текущему содержанию железнодорожного пути, в частности к конструкции устройств управления выправкой железнодорожного пути вплане, профиле и по уровню. Известно устройство управления выправкой железнодорожного пути, содержащее измерители стрел изгиба рельсовых нитей, размещаемые в зоне выправки и на невьшравленном пути, следящую каретку с контактами управления механизмом вьтравки, установленную на пульте управления на парадледьных направляющих и связаннзпо с измерителем стрел в зоне выправки и программную каретку с переключателем контактов, соединенную с при- водом и связанную посредством кулисы с измерителем стрел, размещаемЬм на невыправленном пути 1 }. Известно также устройство управления выправкой железнодорожного пути, содержащее по меньшей мере одну измерительную тележку, блок управ ления, включающий датчик пройденного пути, датчик приращения положения пути и установленный на тележке датчик положения пути, связанный ,через блок управления с рабочим органом для вьтравки пути 2. Однако формирование программы дл управления механизмом вьшравки пути в этих устройствах осуществляется н основании информации, получаемой от измерителей стрел изгиба рельсовых нитей в зоне вьтравки и на невыправ ленном пути. В этом случае на форми руемую программу оказывает влияние состояние невыправленного пути. Кроме того, смещаются по длине пути точки начала и конца переходной кривой и соответственно Нарушается необходю ое для обеспечения плавного движения поездов соответствие изменения кривизны пути в пла не изменению возвьщ1ения пути по уровню. Указанные устройства содержат та же большое количество механических преобразукщих элементов (следящую каретку с контактами управления рабочим органом для вьтравки пути, св занную с измерителем стрел изгиба в зоне выправки, программную каретку с переключателем контактов, соединенную с приводом и связанную посредством кулисы с измерителем стре размещенным на невыправленном пути и др.), которые в свою очередь также снижают качество выправки пути и надежность работы устройства управления выправкой пути, а следовательно, снижают его эффективность. Целью изобретения является повышение надежности устройства и точности выправки пути. Цель достигается тем, что устройство управления выправкой железнодорожного пути, содержащее по меньшей мере одну измерительную тележку, блок управления, включающий датчик пройденного пути, датчик приращения положения пути и установленный на тележке датчик положения пути, связанный через блок управления с рабочим органом для выправки пути, снабжено счетчиком импульсов от датчика пройденного пути и приводом датчика приращения положения пути, причем вход счетчика импульсов соединен с датчиком пройденного пути, а выход этого счетчика - с указанным приводом. На чертеже изображена принципиальная схема устройства управления выправкой железнодорожного пути, например, по уровню. Устройство управления выправкой железнодорожного пути содержит измерительную тележку 1, на которой закреплен датчик 2 уровня, являющийся датчиком положения пути в вертикальной плоскости. В качестве датчика 2 уровня используется физический маятник. В койесо вмонтирован датчик 3 пройденного пути, который связан с входом счетчика 4 импульсов от датчика пройденного пути. Датчик 3 пути представляет собой мерное колесо с вмонтированным в него магнитом и магнитоуправляемыми контактами (герконами). Выход счетчика 4 связан с приводом 5 датчика 6 приращения положения пути, который, в свою очередь, через масштабирующий элемент 7, формирующий программную величину приращения возвьвпения, и блок 8 сравнения связан с датчиком 2 уровня, а выход блока 8 сравнения соединен с рабочим органом 9 для выправки пути. В качестве датчика 6 приращения положения пути и масштабирующего элемента 7, могут быть использованы по тенциометры, вращающиеся трансформаторы и т.д. Привод 5 может быть выполнен в виде шагового двигателя. 3, Счетчик 4 предназначен,для формирования импульсов в определенной последовательности по-мере движения , устройства по пути во время работы, эти импульсы управляют приводом 5 (включают обмотки шагового двигател Привод 5 поворачивает датчик 6 на определенный угол в зависимости от сигналов, поступающих с дапчика 3 через счетчик 4, который считает эти сигналь и через определенное их количество включает привод 5, Счетчик 4 может быть выполнен в виде триггеров (логических элементо соответствующим образом связанных .между собой. Для обеспечения работы устройства, например, в переходной кривой необходимо иметь информацию о начале переходной кривой (НПК), величине возвышения на круговйй кривой СЬ , длине переходной кривой ( пк и направлении возвышения (левое возвьшение или правое возвышение) На основании информации о величине возвышения на круговой кривой и дли не переходной кривой по таблице определяется .величина приращения возвьппения () на коротком, наприме однометровом, отрезке пути. Эта вел чина предварительно, до начала переходной кривой, устанавливается масштабирующим элементом 7, шкала которого отградуирована в величинах приращения возвьш1ения. Кроме этого, при подходе к переходной кривой устанавливается направление возвышения. При совпадении измерительной т лежки 1 с установленным на ней датч ком уровня с НПК включается связь между датчиком 3 пройденного пути и счетчиком 4. По мере движения измерительной тележки от датчика 3 пост пают импульсы, например через 0,25 в счетчик 4, приводящий в движение привод 5 датчика 6 приращения положения пути, выходной сигнал которог пропорционален длине пути, пройденного измерительной тележкой 1. Таким образом, программная величина формируется не на основании информации, получаемой с невыправленногр пути, который может существенно отличаться от требуемого, а задается взависимости от требуемых паспортных значений для данного участка пу ти. В процессе работы машины программная величина возвьш1ения накап84ливается по мере движения машины в переходной кривой, так как по мере поступления импульсов от счетчика 4 привод 5 изменяет первоначальное положение связанного с ним датчика 6 на величину, пропорциональную пройденному пути. При этом на входе блока 8 сравнения формируется сигнал управления рабочим органом 9, представляющий собой алгебраическую сумму сигналов с датчика 2 уровня, пропорциональных измеряемому положению пути по уровню, и с датчика 6 приращения положения пути, пропорциовальных в заданном, посредством элемента 7 масштабе измеряемой длине переходной кривой. В результате выправка пути осуществляется в соответствии с заданной программной величиной возвьш1ения для данного участка. Тем самым достигается повьш1ение точности выправки пути. В качестве , датчика 6 и масштабирующего элемента 7 могут быть использованы однотипные унифицированные элементы (потенциометры, вращакициеся трансформато|ры и др.), выходное напряжение которых пропорционально измеряемому параметру. Поэтому на входе блока 8 происходит суммирование в аналоговой форме двух электрических сигналов от датчика 2 уровня и от датчика 6 с учетом масштабирования посредством элемента 7 приращения положения пути, что одновременно с повы-шением точности выправки позволяет упростить устройство управления выправкой железнодорожного пути за счет исключения большого количества преобразующих механических элементов (следя1цую каретку, программную каретку с переключателем контактов, кулису и др.) и тем самым повысить iнадежность работы устройства. При совмещении измерительной тележки 1 с концом переходной кривой отключается связь между датчиком 3 пройденного пути и счетчиком 4, и набор отвода возвьш1ения прекращается. При этом показания указателя датчика 6 приращения положения пути, отградуированного в метрах, должны соответствовать заданной длине переходной кривой Pf,. Устройство управления выправкой пути при помощи счетчика 4, привода 5, датчика 6, а также масштабирующего элемента 7 и соответствуюjщих связей между ними позволяет при различных сочетаниях параметров кривой (ее длины и возвышения - для выправки пути по уровню, или ее длины и радиуса кривой - для выправки пути в плане) автоматизи ровать процесс управления вьтрав кой пути в кривых его участках. Для устройства управления выправкой железнодорожного пути в плане вместо датчика 2 уровня.используется датчик стрел изгиба пути, который является датчиком положения пути в плане, а вместо элемента 7, формирующего программную величину приращения возвьшения, используется масщтабирующий элемент, формирующий программную величину приращения стре лы из.гиба пути. Датчик 6 приращения положения пути и связи в этом устройстве аналогичен тем, которые приведены для устройства управления выправкой железнодорожного пути по уровню. 8 Предложенное устройство обеспечивает повышение точности выправки железнодорожного пути за счет того, что автоматически в функции пройденного пути производится набор отвода возвышения по уровню и изменение кривизны пути в плане в соответствии с программными (паспортными) значениями для данного участка пути. Одновременно с повышением точности достигается упрощение конструкции, что, в свою очередь, позволяет повысить надежность работы устройства. Кроме этого, применение предложенного устройства облегчает условия работы машиниста выправочно-подбивочно-рихтовочной машины. Таким образом, устройство имеет большое народнохозяйственное значение и может быть использовано для автоматизации процессов вьшравки железнодорожного пути по уровню, в плане и в продольном профиле на выправочно-подбивочно-рихтовочных машинах непрерывного и циклического действия.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство дистанционного управления механизмом рихтовки рельсового пути | 1973 |
|
SU501129A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для рихтовки железнодорожного пути | 1975 |
|
SU587206A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
