Изобретение относится к машиностроению, в частности к соединениям деталей машин.
Известно [1, с. 20, 3-ий и 4-ый абзацы сверху], что любая механическая система (механизм, машина) состоит из звеньев и соединений звеньев, а соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой.
Известно также, что существуют лишь две пространственные двухподвижные кинематические пары, которые согласно [1, с. 31, табл. 1, поз. 5 и 6] называют парами IV класса. Одна из этих пар обеспечивает два вращательных движения в двух разных плоскостях и представляет собой сферический шарнир с пальцем [1, с. 31, табл. 1, поз. 6]. Вторая двухподвижная пара называется цилиндрической парой [1, с. 31, табл. 1, поз. 5], она обеспечивает одно вращательное и одно поступательное движения относительно одной из осей координат.
Известна двухконтактная кинематическая пара [патент РФ N 2098701 Бюл. N 34. 1997 г.], которая обеспечивает поступательное и вращательное движения, однако при условии, что оба эти движения являются зависимыми. При некотором заданном взаимном расположении пальцев эта пара может обеспечить поступательное движение.
Двухконтактная кинематическая пара, обеспечивающая два независимых поступательных движения во взаимно перпендикулярных направлениях, в технике неизвестна. Более того, в книге академика И.И. Артоболевского [2, с. 59, строки 11-9 снизу] записано: "Пары четвертого класса третьего вида (допускающие два поступательных движения) созданы быть не могут". Авторы настоящего изобретения утверждают, что техническое решение этой проблемы существует, и оно ими найдено.
В качестве прототипа настоящего изобретения принимаем плоскостную кинематическую пару [1, табл. 1 на с. 31, 4 поз. сверху], которая обеспечивает три относительных движения звеньев: плоскости и параллелепипеда, а именно два поступательных в одной плоскости и одно вращательное вокруг оси, перпендикулярной плоскости.
Недостатком этой пары является то обстоятельство, что при необходимости обеспечения в практике двух поступательных движений во взаимно перпендикулярных направлениях невозможно в ней устранить третье вращательное движение.
Задачей настоящего изобретения является нахождение такого геометрического исполнения звеньев, при котором может быть осуществлено два поступательных движения, а третье, именно вращательное относительное движение звеньев, является невозможным.
Сущность изобретения заключается в том, что в двухконтактной кинематической паре, содержащей два звена - плоскость и параллелепипед -, последние согласно изобретению снабжены конусообразными выступами, и контакт звеньев происходит по образующим конусообразных выступов, выполненных с различными углами конусности.
На чертеже изображена предлагаемая двухконтактная двухподвижная кинематическая пара. Она представляет собой соединение двух звеньев - плоскости 1 и параллелепипеда 2 -, каждое из которых снабжено жестко связанными с ними конусообразными выступами, при этом двумя контактами пары являются плоскость одного и конусообразный выступ другого, а сами контакты есть линии, являющиеся образующими конусов. При этом углы конусности конусообразных выступов звеньев выполнены различными. При обеспечении линейного контакта звеньев: плоскость - конусообразный выступ, предлагаемая пара обеспечивает лишь два независимых друг от друга поступательных движения, а именно перемещение вдоль оси X и перемещение вдоль оси Y. Любой независимый поворот звена 1 относительно звена 2 вокруг вертикальной оси Z, перпендикулярной плоскости XY, приведет к нарушению линейного контакта между звеньями, и потому невозможен. Необходимо отметить, что при перемещении звена 2 вдоль оси Y или X звена 1 неизбежен некоторый разворот звена 2 вокруг оси Z, что обусловлено разностью в геометрических размерах конусообразных выступов. Однако эти развороты являются зависимыми от основного движения, а потому такая пара является двухподвижной, т.к. независимых друг от друга движений можно задать в ней два.
В частном случае, когда угол конусности одного из геометрических элементов звеньев будет равен нулю, пара превращается в одноподвижную - поступательную, а если угол конусности будет равен нулю у обоих выступов, то пара станет трехподвижной, т.е. принятой за прототип.
1. Артоболевский И.И. Теория механизмов и машин. Учебник для втузов. - 4-е изд., перераб. и доп.- М., Наука, Гл. ред. физ.-мат. лит., 1988 - 640 с.
2. Артоболевский И.И. Теория механизмов. М., Наука, Гл. ред. физ.-мат. лит., 1965 - 776 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2240454C1 |
| ЧЕТЫРЕХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2004 |
|
RU2261386C1 |
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2241880C1 |
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2534095C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПЯТИКОНТАКТНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137965C1 |
| ТРЕХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2001 |
|
RU2215213C2 |
| ОДНОКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2018 |
|
RU2681467C1 |
| БУРОВОЙ МАНИПУЛЯТОР | 1998 |
|
RU2143067C1 |
| МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2017 |
|
RU2668414C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ РАЗДЕЛЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2001 |
|
RU2207462C1 |
Изобретение относится к машиностроению и может использоваться для соединения деталей машин. Кинематическая пара выполнена в виде двух звеньев - плоскости и параллелепипеда, при этом последние имеют конусообразные выступы с различными углами конусности, по образующим которых происходит контакт звеньев. Конусообразные выступы выполнены с различными углами конусности. Изобретение позволяет осуществлять два поступательных движения звеньев и делает невозможным вращательное относительное движение звеньев. 1 ил.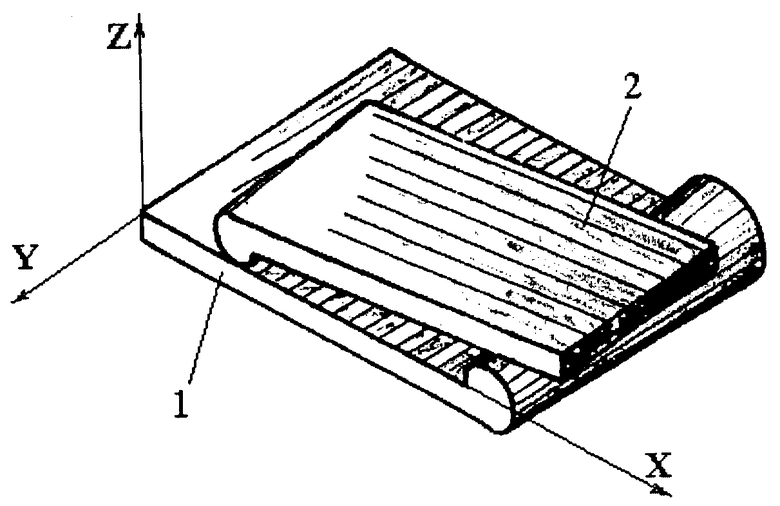
Двухконтактная двухподвижная кинематическая пара, включающая два звена - плоскость и параллелепипед, отличающаяся тем, что плоскость и параллелепипед снабжены конусообразными выступами и контакт звеньев происходит по образующим конусообразных выступов, причем конусообразные выступы выполнены с различными углами конусности.
| Артоболевский И.И | |||
| Теория механизмов и машин | |||
| Учебник для втузов | |||
| - М.: Наука, 1988, стр | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ДВУХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1996 |
|
RU2098701C1 |
| Артоболевский И.И | |||
| Теория механизмов и машин | |||
| Учебник для втузов | |||
| - М.: Наука, 1988, стр | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
