Изобретение относится к машиностроению, в частности, к соединениям деталей машин.
Известно [1, с.20, 3-й и 4-й абзацы сверху], что любая механическая система (механизм, машина) состоит из звеньев и соединений звеньев, а соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой.
Различают кинематические пары низшие и высшие [1, с.27, пункт 7°]. Если соприкосновение звеньев происходит по поверхности, то пара называется низшей, а если по линии или в точке, то - высшей.
В той же книге введено понятие числа контактов звеньев между собой [1, на с.20, начиная со строки 18 снизу], где записано "совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары". Именно "совокупность" - есть то самое число, которое определяет контактность. Каждая поверхность, каждая линия и каждая точка этой совокупности есть контакт.
Известно также, что существуют лишь две пространственные двухподвижные кинематические пары, которые согласно [1, с.31, табл.1, поз. 5 и 6] называют парами IV класса. Одна из этих пар обеспечивает два вращательных движения в двух разных плоскостях и представляет собой сферический шарнир с пальцем [1, с.31, табл. 1, поз. 6]. Вторая двухподвижная пара называется цилиндрической парой [1, с.31, табл. 1, поз. 5], она обеспечивает одно вращательное и одно поступательное движения относительно одной из осей координат.
Трехконтактная кинематическая пара, обеспечивающая два независимых движения - вращательное и поступательное относительно одной оси, в технике неизвестна.
В качестве прототипа настоящего изобретения принимаем цилиндрическую кинематическую пару [1, с.25, рис. 1.7 и строки с 22 по 14, снизу, и табл. 1 на с.31], которая состоит из цилиндра и желоба (валика и втулки), соприкасающихся по цилиндрической поверхности. Такая пара есть низшая пара и двух подвижная, она позволяет звеньям совершать относительные движения вдоль их геометрической оси и вокруг этой оси. Цилиндрическая пара обеспечивает соприкосновение деталей по единой цилиндрической поверхности, т.е. такая пара есть одно контактная.
Недостатком такой кинематической пары является неизбежность неточности изготовления поверхностей валика и втулки, обусловленной случайностями результатов при механической обработке деталей, контакт в такой паре не может быть обеспечен по всей цилиндрической поверхности, нельзя также гарантированно обеспечить совмещение геометрических осей валика и втулки. Кроме того, неизбежны осевые зазоры между втулкой и валиком, приводящие к относительным их осевым смещениям. В целом такая пара оказывается несамоустанавливающейся и более чем двухподвижная, что обуславливает отклонение от теоретически заданных движений. Никакие усовершенствования пары валик-втулка не дают точного решения задачи – самоустановки.
Задачей изобретения является устранение независимых движений, появляющихся в результате неточности изготовления, т.е. обеспечение самоустановки кинематической пары.
Сущность изобретения состоит в том, что в трехконтактной двухподвижной кинематической паре, состоящей из цилиндра и желоба, согласно изобретению, пара снабжена шаром и корсетом, при этом желоб выполнен двухгранным и жестко связан с корсетом, цилиндр жестко связан с шаром и взаимодействует с корсетом, а шар - с двухгранным желобом.
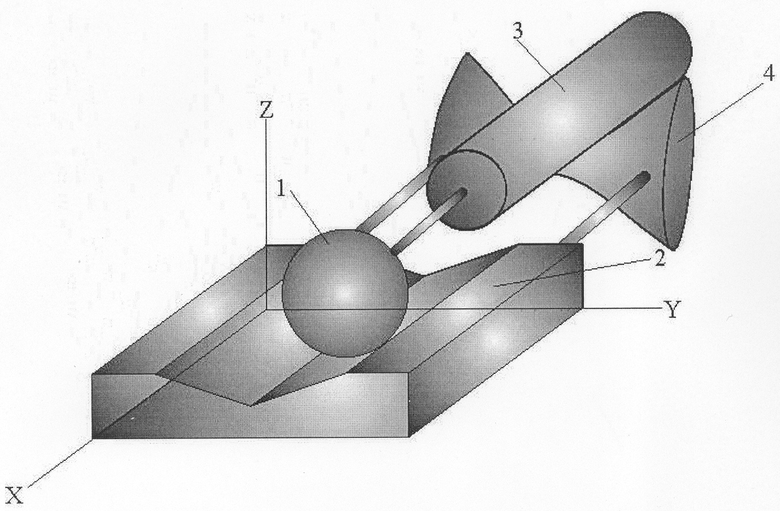
На чертеже изображена предлагаемая самоустанавливающаяся трехконтактная высшая кинематическая пара. Пара состоит из шара 1, взаимодействующего с двухгранным желобом 2, выполненного в виде двух пересекающихся плоскостей, и цилиндра 3, взаимодействующим с корсетом 4, представляющим собой выпукло-вогнутую поверхность. При этом шар 1 и цилиндр 3 жестко связаны между собой прямолинейным стержнем, двухгранный желоб 2 и корсет 4 также жестко связаны между собой.
Кинематическая пара работает следующим образом. Так как шар 1 в двухгранном желобе 2 и цилиндр 3 на корсете 4 самоустанавливаемы, то жесткая связь шара с цилиндром посредством стержня не нарушит самоустановки. Число контактов между звеном, состоящим из шара 1 и цилиндра 3, и звеном, состоящим из желоба 2 и корсета 4, окажется равным трем. При этом невозможными станут движения вокруг и вдоль оси Z, вокруг и вдоль оси Y, т.е. пара становится двух подвижной, обеспечивающей два движения - вращательное и поступательное относительно оси X. Т.о. кинематическая пара становится самоустанавливаемой, т.е. исключаются независимые движения.
Источники информации
1. Артоболевский И.И. Теория механизмов и машин. Учебник для втузов. 4-е изд., перераб. и доп. - М.: Наука. Гл. ред. физ. - мат. лит., 1988, 640 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПЯТИКОНТАКТНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137965C1 |
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2240454C1 |
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2014 |
|
RU2564788C2 |
| УДЕРЖИВАЮЩАЯ ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2012 |
|
RU2502898C1 |
| ЧЕТЫРЕХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2004 |
|
RU2261386C1 |
| ДВУХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1996 |
|
RU2098701C1 |
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2578809C2 |
| ДВУХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137964C1 |
| ДВУХПОДВИЖНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2021 |
|
RU2755441C1 |
| ТРЕХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2001 |
|
RU2215213C2 |
Изобретение относится к соединениям деталей машин. Трехконтактная двухподвижная кинематическая пара состоит из двух соприкасающихся звеньев. Первое звено выполнено в виде цилиндра и жестко связанного с ним шара. Второе звено выполнено в виде двухгранного желоба и жестко связанного с ним элемента, имеющего выпукло-вогнутую поверхность, обеспечивающую самоустанавливание на упомянутом элементе цилиндра и на двухгранном желобе - шара. Технический результат заключается в обеспечении самоустановки кинематической пары. 1 ил.
Трехконтактная двухподвижная кинематическая пара, включающая два соприкасающихся звена, первое звено выполнено в виде цилиндра, жестко связанного с шаром, а второе звено выполнено в виде двугранного желоба, жестко связанного с элементом, имеющим выпукло-вогнутую поверхность, для обеспечения самоустанавливания на упомянутом элементе цилиндра и на двугранном желобе - шара.
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПЯТИКОНТАКТНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137965C1 |
| АРТОБОЛЕВСКИЙ И.И | |||
| Механизмы в современной технике | |||
| Т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| WO 9309356 A1, 13.05.1993. | |||

