Изобретение относится к машиностроению, в частности к соединениям деталей машин.
Известно [1, с. 20, 3-ий и 4-ый абзацы сверху], что любая механическая система (механизм, машина) состоит из звеньев и соединений звеньев, а соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой.
К настоящему времени в технике не существует кинематической пары, которая посредством трех контактов позволяет осуществить лишь вращательное движение одного из звеньев.
Задачей настоящего изобретения является нахождение такого исполнения звеньев, при котором посредством трех контактов может быть осуществлено лишь вращательное движение, а в случае необходимости, и зависимое поступательное.
Сущность изобретения заключается в том, что в трехконтактной кинематической паре, содержащей два звена, первое звено выполнено в виде шайбы с выпуклой боковой поверхностью, а второе - в виде плоскости с жестко закрепленными на ней двумя цилиндрами, причем один контакт пары образован плоскими поверхностями обоих звеньев, а два других - выпуклой боковой поверхностью первого звена и образующими цилиндров второго звена.
При постоянном контакте звеньев в кинематической паре осуществляется лишь одно вращательное движение относительно оси, перпендикулярной плоскости.
На чертеже изображена предлагаемая трехконтактная вращательная кинематическая пара. Она представляет собой соединение двух звеньев - шайбы 1 с выпуклой боковой поверхностью и плоскости 2, которая жестко связана с двумя цилиндрами 3 и 4, при этом одним контактом пары являются плоские поверхности обоих звеньев, еще двумя контактами пары являются выпуклая поверхность первого звена и образующие цилиндров второго звена. При обеспечении всех трех контактов звеньев и при условии, что радиус R имеет постоянное значение, предлагаемая пара обеспечивает лишь одно вращательное движение, а именно вращение вокруг оси Z.
В частном случае, если радиус R звена 1 изменяется, любой независимый поворот звена 1 относительно звена 2 вокруг вертикальной оси Z, перпендикулярной плоскости XY, вызовет зависимое поступательное движение звена 1 вдоль оси X. Это движение можно осуществить по заранее заданному закону, который целиком будет зависеть от переменного радиуса R. Класс пары от этого не изменяется, она остается одноподвижной, т.к. независимое движение в ней осуществляется лишь одно.
Источник информации
1. Артоболевский И.И. Теория механизмов и машин. Учебник для втузов. - 4-е изд. , перераб. и доп.- М.: Наука, Гл. ред. физ.-мат. лит., 1988. - 640 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2240454C1 |
| КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ | 2001 |
|
RU2210692C1 |
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2241880C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПЯТИКОНТАКТНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137965C1 |
| ДВУХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137964C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ РАЗДЕЛЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2001 |
|
RU2207462C1 |
| ЧЕТЫРЕХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2004 |
|
RU2261386C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ПРЕССА | 2001 |
|
RU2201348C1 |
| БУРОВОЙ МАНИПУЛЯТОР | 1998 |
|
RU2143067C1 |
| СОЕДИНЕНИЕ ТРУБ | 2002 |
|
RU2230946C2 |
Изобретение относится к машиностроению, в частности к соединениям деталей машин. Технический результат - обеспечение трехконтактного взаимодействия двух звеньев с возможностью осуществления лишь вращательного движения, а в случае необходимости и поступательного. Кинематическая пара содержит два звена. Первое звено выполнено в виде шайбы с выпуклой боковой поверхностью, второе звено - в виде плоскости с жестко закрепленными на ней двумя цилиндрами. Один контакт пары образован плоскими поверхностями обоих звеньев, а два других - выпуклой боковой поверхностью первого звена и образующими цилиндров второго звена. 1 ил.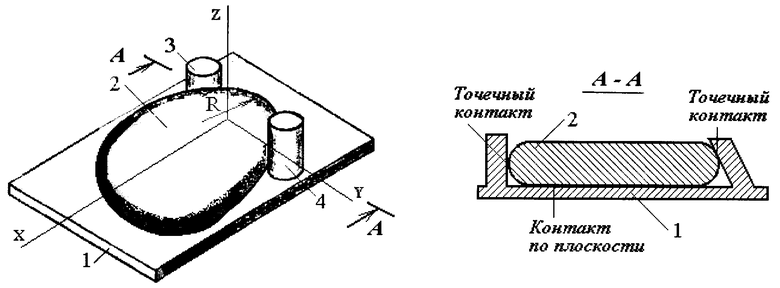
Трехконтактная одноподвижная кинематическая пара, содержащая два звена, первое из которых выполнено в виде шайбы с выпуклой боковой поверхностью, а второе - в виде плоскости с жестко закрепленными на ней двумя цилиндрами, причем один контакт пары образован плоскими поверхностями обоих звеньев, а два других - выпуклой боковой поверхностью первого звена и образующими цилиндров второго звена.
| АРТОБОЛЕВСКИЙ И.И | |||
| Теория механизмов и машин | |||
| - М.: Наука, 1975, с.31. |

