ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к отслеживанию пространственного предела визуального блокирования и, более конкретно, к интерактивному инструменту визуального наведения для такого отслеживания.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Успешное ультразвуковое сканирование сильно зависит от обучения и опыта пользователя. Эхокардиографические сканирования особенно сложны, поскольку сердце окружено ребрами и легочной тканью. Ультразвук может с трудом проникать через кальцинированные ребра (как правило, встречающиеся при апикальной проекции) и легочную ткань из-за сильного несоответствия акустического импеданса между ними и окружающей тканью организма. Кроме того, поглощение ультразвука в ребрах является довольно высоким по сравнению с поглощением мягкой тканью. Чтобы избежать артефактов, пользователь должен поместить зонд в правильном положении, т.е., найти хорошее акустическое окно для формирования изображения. Обычно это делается исключительно на основе ультразвуковых изображений, отображаемых на экране в режиме реального времени. Хотя опытные пользователи, как правило, способны распознать ухудшение изображения и, соответственно, улучшить качество изображения, перемещая зонд в лучшее положение, менее опытные пользователи могли бы получить дефектные изображения из-за плохой зрительной координации движений рук и меньшего узнавания артефактов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
То, что предлагается в настоящем описании ниже, направлено на решение одной или более из рассмотренных выше проблем.
Существует потребность в инструменте, который может в режиме реального времени направлять и тренировать неопытных или менее опытных пользователей в позиционировании зонда для оптимального качества изображения.
Для того чтобы направлять и тренировать неопытных или менее опытных пользователей для помещения зонда в правильное положение, в настоящем документе предлагается помочь пользователям с плохой зрительной координацией движений рук, предоставляя отображение перевернутого «V», наложенного на изображения. Каждая из двух ножек «V» указывает на край блокирования, такой как ребро, например, одна ножка на ребро. Каждая из двух ножек «V» движется в режиме реального времени в соответствии с перемещением поля обзора зонда по отношению к блокированию. Поле обзора может двигаться, например, в соответствии с перемещением зонда. Движение ножки можно видеть на экране как соответствующие вращения ножек в режиме реального времени так, что они, хотя и сохраняют свою форму «V», продолжают обрамлять все, что является текущей не блокированной областью на ультразвуковом изображении на экране в текущий момент. Поле обзора может быть трехмерным в случае матричного зонда. Или поле обзора может находиться в пределах плоскости изображения в случае матричных зондов или одномерных, т.е., 1D, зондов. Плоскость изображения может быть вращаемой либо электронными средствами, либо посредством ручного управления, связанного с манипуляциями, в то время как на экране появляется интерактивная обратная связь. В частности, вращение может быть таким, чтобы вращать упомянутую плоскость изображения в и вне расположения относительно соответствующих плоскостей x, причем знак движется динамически в соответствии с вращением. Более чем одна ультразвуковая проекция и соответственно более чем один знак, например, ножка «V», или пара знаков, может быть видимым на экране, например, одновременно. В частности, то, что представлено для просмотра, может быть одним изображением в одной плоскости изображения и одновременно другим изображением в другой, отличающейся плоскости изображения или плоскости x, знаки на обоих изображениях движутся динамически вместе с изменением поля обзора по отношению к блокированию. Знак альтернативно может быть окраской, добавляемой на экран на место накладного графического элемента ножки V или его дополнением, таким, что появляется окраска, например, по всей области блокирования, видимой на экране.
В соответствии с одним аспектом настоящего изобретения интерактивный инструмент визуального наведения предназначен для прибора, который включает в себя устройство отображения; зонд формирования изображения и модуль воспроизведения проекции, выполненный с возможностью представления на упомянутом устройстве отображения изображения, полученного помощью упомянутого зонда. Упомянутый инструмент выполнен с возможностью навигации пользователя по отношению к блокированию поля обзора. Инструмент включает в себя: блокировочный модуль, выполненный с возможностью обнаружения и пространственного ограничения упомянутого блокирования; и процессор отслеживания разграничения, выполненный с возможностью объединения знака, визуально представляющего указание границ, с упомянутым изображением для совместной визуализации на упомянутом устройстве отображения. Упомянутый инструмент выполнен с возможностью динамического перемещения упомянутого знака в соответствии с движением упомянутого поля обзора относительно упомянутого блокирования.
В качестве под-аспекта изображение включает в себя ультразвуковое изображение.
В дополнительном под-аспекте для получения изображения упомянутый инструмент включает в себя каналы формирования изображения для приема данных изображения с помощью упомянутого зонда. Для данных, принятых по упомянутым каналам и с применением задержек фокусирования, вычисляется мера сходства между данными. Ограничение основывается на мере.
В еще одном дополнительном под-аспекте упомянутая мера является представлением корреляции между суммарными данными по пучку с различными апертурами, причем упомянутые каналы разделены между апертурами.
В качестве еще одного под-аспекта упомянутые апертуры являются чередующимися комплементарными апертурами.
В еще одном конкретном дополнительном под-аспекте упомянутые каналы случайным образом разделены между упомянутыми апертурами.
В другом под-аспекте определяется, блокированы ли ультразвуковые пучки в соответствующих направлениях, причем упомянутое ограничение основывается на результате упомянутого определения.
В под-аспекте этого для получения упомянутого изображения упомянутый инструмент имеет каналы формирования изображения для приема данных изображения с помощью упомянутого зонда. Вычисляется мера когерентности упомянутых данных, принятых по упомянутым множественным каналам. Упомянутое определение блокирования/неблокирования для некоторого направления основывается на упомянутой мере для местоположений в этом направлении.
В одном дополнительном под-аспекте этого определение в некотором направлении основано на том, показывает ли упомянутая мера заранее заданный уровень когерентности для по меньшей мере заранее заданного числа местоположений в этом направлении, для которых была рассчитана упомянутая мера.
В другом под-аспекте поле обзора является V-образным с концом V на упомянутом зонде.
В качестве связанного под-аспекта упомянутый знак имеет форму отрезка прямой.
В одном под-аспекте этого имеется объединение второго знака, визуально представляющего упомянутое указание границ, с упомянутым изображением для совместной визуализации на упомянутом устройстве отображения. Упомянутый инструмент дополнительно выполнен с возможностью динамического перемещения второго знака в соответствии с движением поля обзора относительно упомянутого блокирования. Эти знаки совместно представляют собой V-образную форму.
В другом под-аспекте упомянутый знак представляет пространственную границу упомянутого блокирования.
В качестве альтернативного под-аспекта упомянутое объединение включает в себя добавление к упомянутому изображению цвета в качестве упомянутого знака.
В качестве дополнительного под-аспекта упомянутое изображение имеет форму сектора круга.
В еще одном под-аспекте упомянутый зонд является матричным зондом с трехмерным полем обзора. В отношении одного и того же положения зонда другой знак объединяется с другим изображением для совместной визуализации на упомянутом устройстве отображения, упомянутые два изображения находятся в разных плоскостях изображения. Упомянутый инструмент дополнительно выполнен с возможностью динамического перемещения упомянутого другого знака в соответствии с движением упомянутого поля обзора относительно блокирования в соответствующей другой плоскости изображения.
В качестве под-аспекта вышеизложенного упомянутое другое изображение и упомянутое изображение отображаются одновременно на упомянутом устройстве отображения.
В конкретном под-аспекте упомянутое обнаружение и упомянутое ограничение имеют место в отношении ребра человека или животного, как причины упомянутого блокирования.
В определенном под-аспекте вычисляется доля выборочных местоположений в пределах упомянутого поля обзора, которые имеют достоверные данные. Указатель вычисленной доли показывается на упомянутом устройстве отображения.
В одном варианте упомянутого инструмента упомянутое поле обзора находится в пределах плоскости изображения. Упомянутое блокирование по отношению к изображению находится в упомянутой плоскости изображения.
В другом под-варианте упомянутый инструмент выполнен с возможностью вращения упомянутой плоскости изображения в и вне расположения относительно соответствующих плоскостей x и динамического перемещения упомянутого знака в соответствии с упомянутым вращением.
В еще одном под-варианте упомянутая плоскость изображения перпендикулярна одному или более ребер, вызывающих упомянутое блокирование.
В еще одном под-аспекте упомянутое поле обзора является полем обзора упомянутого зонда.
Подробная информация о новой интерактивной технологии визуального наведения в режиме реального времени изложена ниже с помощью сопровождающих чертежей, которые вычерчены не в масштабе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На ФИГ. 1 представлено схематическое представление ультразвукового аппарата с техническим интерактивным наведением в соответствии с настоящим изобретением;
На ФИГ. 2 представлено изображение, показывающее пример разграничения формирования изображения/блокирования и упомянутых направлений блокирования, в соответствии с настоящим изобретением;
На ФИГ. 3 представлена блок-схема и список формул, относящихся к пространственному различению, основанному на когерентности, и определению границы блокирования проекции, основанному на различении, в соответствии с настоящим изобретением;
ФИГ. 4 представляет собой концептуальную схему, иллюстрирующую случайно выбранные комплементарные апертуры матрицы преобразователя и их использование в отслеживании пространственных пределов визуального блокирования;
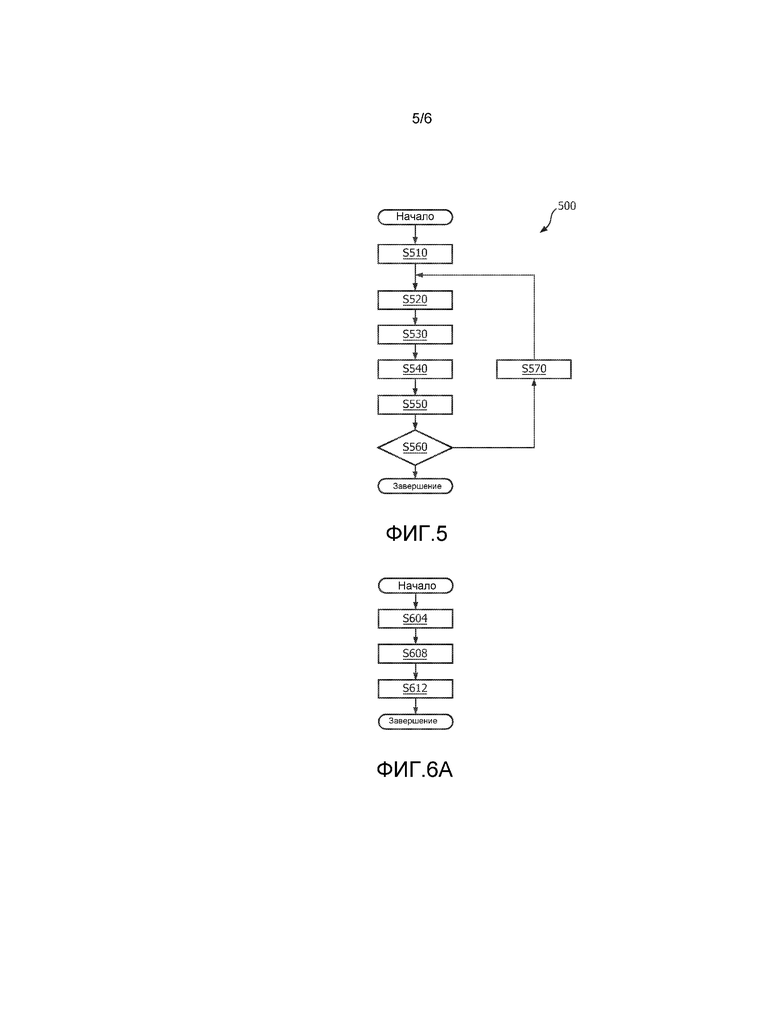
ФИГ. 5 представляет собой блок-схему всей работы для одной реализации аппарата с ФИГ. 1 в соответствии с настоящим изобретением;
ФИГ. 6А представляет собой блок-схему примера расчета карты когерентности в соответствии с настоящим изобретением;
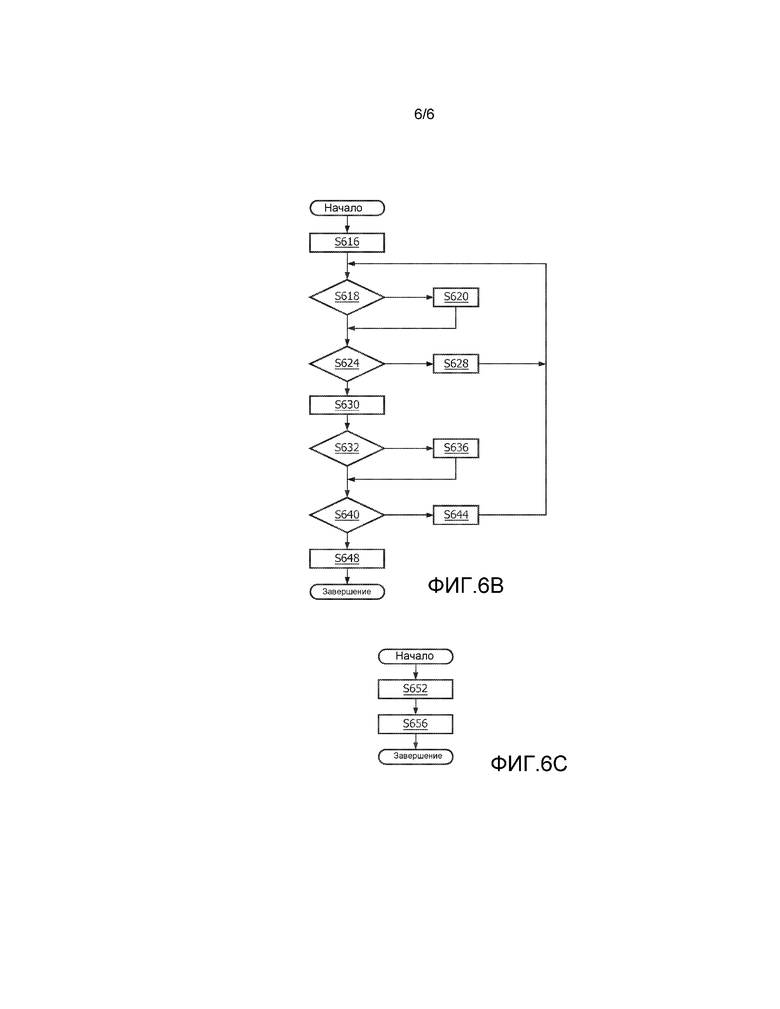
ФИГ. 6B представляет собой блок-схему примера определения граничной линии в соответствии с настоящим изобретением; и
ФИГ. 6C представляет собой блок-схему примера обновления представления на устройстве отображения в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
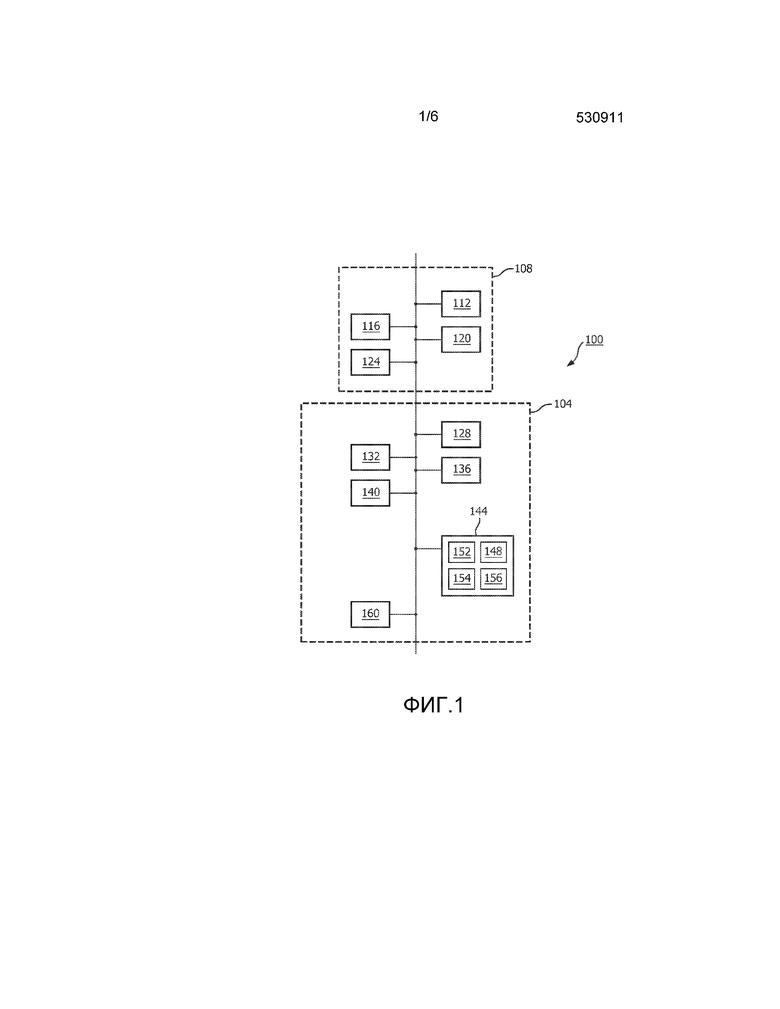
На ФИГ. 1 в качестве иллюстративного и неограничивающего примера изображен ультразвуковой аппарат 100 с техническим интерактивным наведением. Аппарат 100 включает в себя медицинский ультразвуковой прибор 104 и интерактивный инструмент 108 визуального наведения. В состав инструмента 108 входят блокировочный модуль 112, процессор 116 отслеживания разграничения, процессор 120 когерентности данных изображений и схема 124 управления устройством отображения. Медицинский ультразвуковой прибор 104 включает в себя устройство 128 отображения, модуль 132 воспроизведения проекции, системный контроллер 136, память 140, зонд 144 формирования изображения, имеющий матрицу 148 преобразователя, каналы 152 формирования изображения и формирователи 154, 156 пучка; а также пользовательские элементы 160 управления. Блокировочный модуль 112 обнаруживает и пространственно ограничивает блокирование. Процессор 116 отслеживания разграничения объединяет знак, визуально представляющий пространственное указание границ с помощью блокировочного модуля 112, с ультразвуковым изображением для совместной визуализации на устройстве 128 отображения. Процессор 120 когерентности данных изображений сравнивает данные изображений, полученные с помощью комплементарных апертур зонда 144.
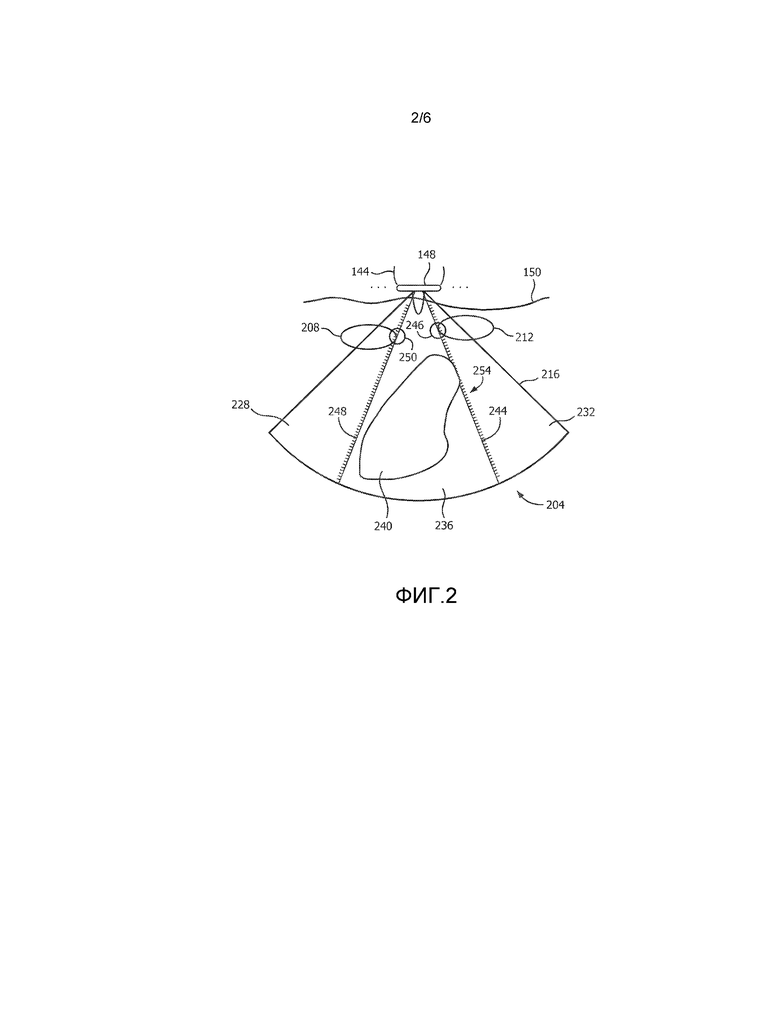
На ФИГ. 2 показано представление ультразвукового изображения 204 в форме веера или сонограммы, полученной посредством матрицы 148 преобразователя с зондом 144 формирования изображения, помещенным между ребрами и вплотную к коже 150 человека или животного. Плоскость изображения перпендикулярна ребрам 208, 212, которые частично блокируют поле 216 обзора зонда 144. Как обсуждалось выше в настоящем документе, из одного изображения 204 без добавления графики неопытному врачу может быть трудно различить блокирование. Ребра 208, 212 и/или легкие (не показаны) вызывают блокирование формирования изображения. Блокирование может быть охарактеризовано областями 228, 232 блокирования с обеих сторон неблокированной области 236. Формирование изображения сердца 240 частично блокируется ребром 212, показанным с правой стороны. Знак 244 на экране визуально представляет пространственно ограниченное блокирование и имеет форму отрезка прямой, простирающегося к изогнутой части изображения 204 в форме веера или форме сектора, а также накладывается на это изображение для совместной визуализации. Поле 216 обзора может меняться, например, посредством перемещения зонда. Во время изменения знак 244 движется по окружности на экране в режиме реального времени, чтобы оставаться указывающим на блокирование формирования изображения, например, ребром 212, показанным справа от текущего изображения 204 на экране. В частности, процессор 116 отслеживания разграничения оценивает угол от левого края 246 ребра 212, показанного справа, относительно апертуры формирования изображения матрицы 148 преобразователя. Второй знак 248 также отслеживает блокирование в режиме реального времени, основываясь на правом крае 250 ребра 208, показанного на ФИГ. 2 с левой стороны, причем знак совместно сохраняет форму «V» с концом «V» на зонде 144. Метки 254 вдоль внешней стороны двух ножек «V» указывают на область блокирования. Ребра 208, 212 показанные на ФИГ. 2, не появились бы на экране; вместо этого, их присутствие отслеживается с помощью знаков 244, 248. Сердце 240, показанное на ФИГ. 2 могло бы появиться на экране как графическое изображение, сгенерированное для представления сегментации на основании ультразвукового формирования изображения. Или сердце 240 может появиться на экране только как часть ультразвукового изображения 204. Хотя предмет обсуждения в настоящем документе относится к блокированию, в основе которого лежит ребро, блокирование также может быть связано с легочной тканью, а знаки 244, 248 отслеживания будут автоматически обрамлять области 228, 232 блокирования.
Когерентность данных канала используется для обнаружения блокирования. Каждый канал поставляет свою соответствующую величину радиочастотных данных, связанную с соответствующим фиксированным элементом преобразователя или участком элементов. Поскольку ультразвуковые эхо-сигналы возвращаются, связанные с ними давления на элементы замеряются быстро и периодически. Замеры задерживаются по отношению друг к другу в соответствии с временем движения вдоль линии визирования до оцениваемой точки поля. Здесь «когерентность» означает сходство между данными, записанными различными каналами матрицы после применения вышеупомянутого приема задержек фокусирования.
Один способ оценки когерентности представляет собой способ оценки когерентности на основе суммарных данных по пучку, такой как описан в патентной публикации США № 2009/0141957 Yen и др., полное раскрытие которой включено в настоящий документ по ссылке.
Способ оценки может быть адаптирован к обнаружению грудного и легочного блокирования, и показан ниже с помощью двух формирователей 154, 156 пучка. Пусть  показывает (действительные) данные канала на глубине r вдоль принимаемого пучка в направлении
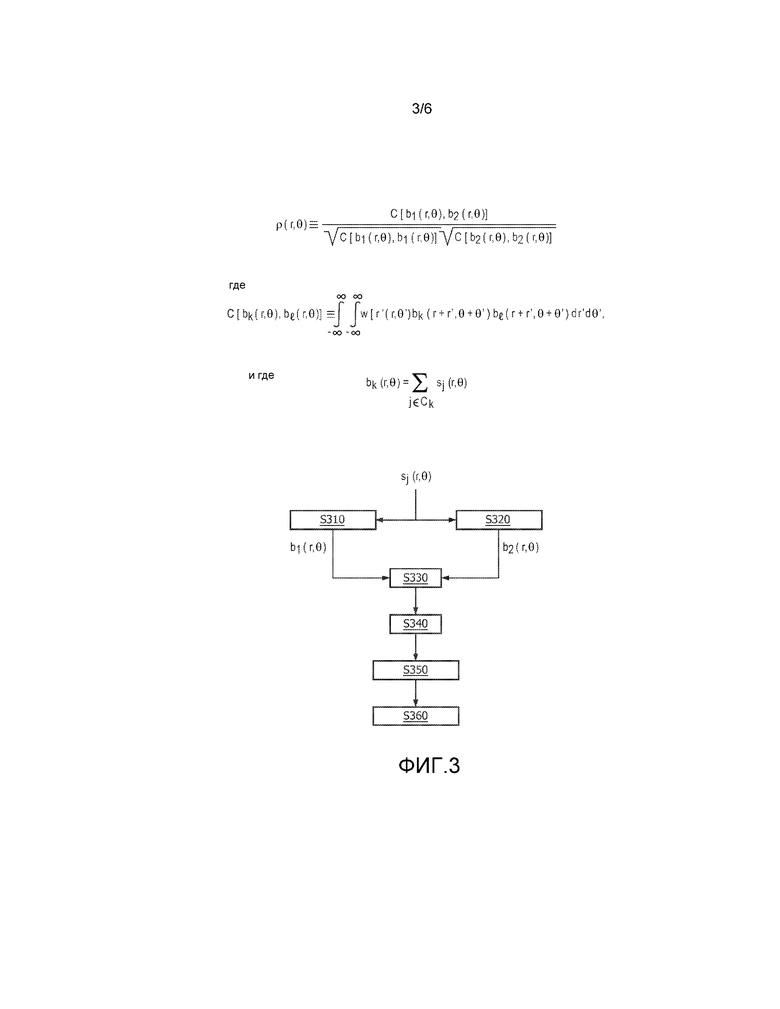
показывает (действительные) данные канала на глубине r вдоль принимаемого пучка в направлении  , те данные, принимаемые j-ым каналом после применения задержки фокусирования, и пусть С1 и С2 показывают набор каналов, используемых в первом и втором формирователях пучка 154, 156 соответственно. Выходом k-ого (k=1, 2) формирователя пучка является
, те данные, принимаемые j-ым каналом после применения задержки фокусирования, и пусть С1 и С2 показывают набор каналов, используемых в первом и втором формирователях пучка 154, 156 соответственно. Выходом k-ого (k=1, 2) формирователя пучка является  , формула для которого показана на ФИГ. 3. Когда все данные канала идентичны по каналам,
, формула для которого показана на ФИГ. 3. Когда все данные канала идентичны по каналам,  и
и  будут сильно коррелировать независимо от того, как выбраны С1 и С2. С другой стороны, когда в данные канала вносят вклад в основном рассеивающие объекты в областях побочных максимумов, корреляция между b1 и b2 может значительно снижаться, если С1 и С2 выбраны правильно. С1 и С2 могут быть комплементарными чередующимися апертурами. Короче говоря, можно различать осевые сигналы и неосевые сигналы на основе корреляции между b1 и b2. Выводом коррелятора является коэффициент корреляции
будут сильно коррелировать независимо от того, как выбраны С1 и С2. С другой стороны, когда в данные канала вносят вклад в основном рассеивающие объекты в областях побочных максимумов, корреляция между b1 и b2 может значительно снижаться, если С1 и С2 выбраны правильно. С1 и С2 могут быть комплементарными чередующимися апертурами. Короче говоря, можно различать осевые сигналы и неосевые сигналы на основе корреляции между b1 и b2. Выводом коррелятора является коэффициент корреляции  для и , определенный, как указано на ФИГ. 3, где
для и , определенный, как указано на ФИГ. 3, где  вещественная симметричная весовая функция затем фильтруется посредством ФНЧ для того, чтобы получить сглаженную корреляционную карту
вещественная симметричная весовая функция затем фильтруется посредством ФНЧ для того, чтобы получить сглаженную корреляционную карту  , которая используется для обнаружения блокирования. Коэффициент корреляции служит мерой подобия или мерой когерентности между данными, принятыми по каналам формирования изображения с применением задержек фокусирования. Это является представлением корреляции между суммарными данными по пучку с различными апертурами с помощью каналов формирования изображения, разделенных между апертурами. Разделение может быть случайным, как далее обсуждается ниже.
, которая используется для обнаружения блокирования. Коэффициент корреляции служит мерой подобия или мерой когерентности между данными, принятыми по каналам формирования изображения с применением задержек фокусирования. Это является представлением корреляции между суммарными данными по пучку с различными апертурами с помощью каналов формирования изображения, разделенных между апертурами. Разделение может быть случайным, как далее обсуждается ниже.
Блок-схема алгоритма показана на ФИГ. 3. Суммы взяты для С1 (этап S310) и для С2 (step S320). Они соотносятся, чтобы вычислить коэффициент корреляции (этап S330), который фильтруется посредством ФНЧ (этап S340), чтобы получить сглаженную карту коэффициентов корреляции, или «корреляционную карту» , используемую для обнаружения блокирования (этап S350). Затем генерируются знаки 244, 248, каждый из которых служит в качестве пространственной границы между блокированием и неблокированием для представления на устройстве отображения в виде перевернутого «V» (этап 360).
(этап S330), который фильтруется посредством ФНЧ (этап S340), чтобы получить сглаженную карту коэффициентов корреляции, или «корреляционную карту» , используемую для обнаружения блокирования (этап S350). Затем генерируются знаки 244, 248, каждый из которых служит в качестве пространственной границы между блокированием и неблокированием для представления на устройстве отображения в виде перевернутого «V» (этап 360).
В конкретном примере данные получаются при частоте дискретизации 32 МГц в режиме импульсной инверсии с использованием зонда, имеющего 80 преобразовательных элементов. Каждый кадр имеет 44 пучка, а плотность пучка составляет 0,4944 пучков/градус. Центральная частота составляет 1,3 и 2,6 МГц при передаче и приеме, соответственно. С1={20-22, 26-28, 32-34, 38-40, 44-46, 50-52, 56-58} и С2={23-25, 29-31, 35-37, 41-43, 47-49, 53-55, 59-61}. Весовая функция , используемая в корреляторе составляет 51 (по оси или в направлении r) к 1 (латерально или в направлении θ) серию импульсов и сглаживающий фильтр составляет 501 на 3 серии импульсов.
Вследствие периодической структуры апертур чувствительность коэффициента ( ) корреляции к неосевым сигналам периодически варьируется в зависимости от направления неосевых сигналов.
) корреляции к неосевым сигналам периодически варьируется в зависимости от направления неосевых сигналов.
Эта периодичность может быть уменьшена посредством рандомизации размеров суб-апертур при сохранении комплементарности обеих апертур. Другими словами, каналы случайным образом разделяются между апертурами.
Примером случайно выбранных комплементарных апертур является С1={21-22, 26-28, 30-31, 35, 37, 39, 41-45, 49, 51, 53, 57, 60-61} и С2={20, 23-25, 29, 32-34, 36, 38, 40, 46-48, 50, 52, 54-56, 58-59}.
Чтобы проверить, является ли пучок, и таким образом его направление, заблокированным, производится подсчет числа точек с коэффициентом ( ) корреляции выше, чем 0,55 между 72 и 180 мм в глубину. Если, по меньшей мере 400 точек (при частоте дискретизации 32 МГц) в пучке имеют высокую когерентность, считается, что этот пучок проник в ткани. В противном случае считается, что он заблокирован ребром.
) корреляции выше, чем 0,55 между 72 и 180 мм в глубину. Если, по меньшей мере 400 точек (при частоте дискретизации 32 МГц) в пучке имеют высокую когерентность, считается, что этот пучок проник в ткани. В противном случае считается, что он заблокирован ребром.
Верхняя граница диапазона глубин не является критической. В качестве нижней границы можно выбрать 72 мм, что гораздо больше, чем обычно толщина человеческих ребер, поскольку высокая когерентность или большие значения коэффициента корреляции могли бы иметь место в областях сразу под ребром из-за многократных отражений (или реверберации) и такие отражения, как правило, стремятся исчезнуть с глубиной.
Описанные апертуры не включают в себя каналы на обоих концах всей апертуры. Хотя апертуры могут быть расширены до включения в себя этих каналов, количество заблокированных пучков может быть занижено, если используются большие апертуры. Это обусловлено тем, что коэффициент корреляции выходов комплементарных апертур все еще может быть высоким, если часть больших комплементарных апертур не заблокирована.
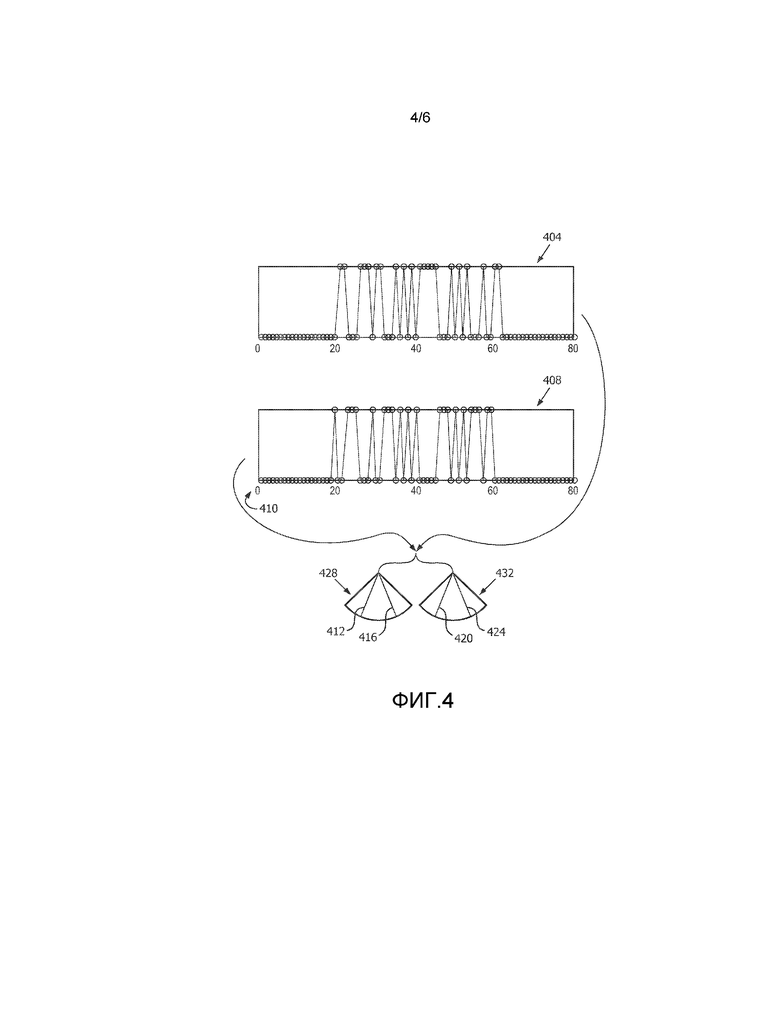
На ФИГ. 4 представлены случайные комплементарные апертуры матрицы преобразователя и их использование в отслеживании пространственных пределов визуального блокирования. Апертура 404 (С1) установлена для первого формирователя 154 пучка и апертура 408 (С2) установлена для второго формирователя 156 пучка. Каналы 410 формирования изображения представлены по горизонтальной оси. Суммарные по пучку выходы апертур 404, 408 связаны с отличительными знаками 412, 416, 420, 424, наложенными на две расположенные рядом отображаемые сонограммы 428, 432, представляющие разные плоскости изображения.
На ФИГ. 5 представлена примерная процедура 500 для работы от начала до конца одной реализации аппарата 100. Аппарат 100 предварительно настроен во время инициализации на чередующиеся комплементарные апертуры, такие как случайно выбранные чередующиеся комплементарные апертуры (этап S510). Производится (этап S520) корреляционная карта для этапа S350. На основании корреляционной карты устанавливаются (этап S530) граничные линии блокирования. Настройки апертур переключаются обратно на получение ультразвукового изображения для отображения (этап S540). Представление обновляется, так же обновляется отображение для перемещения поля 216 обзора (этап S550). Если процедура 500 должна продолжаться (этап S560), установка апертуры переключаются обратно на выработку (случайно выбранных) чередующихся комплементарных апертур (этап S570) и обработка переходит обратно к выводу корреляционной карты в этапе S520.
На ФИГ. 6A представлено более подробное описание формирования корреляционной карты на этапе S520. Данные изображений принимаются по каналам 410 комплементарных апертур 404, 408 (этап S604). Канал применяет задержки фокусирования. Каждый из формирователей 154, 156 пучка делает это отдельно (этап S608). Задержанные данные суммируются по пучку соответствующими формирователями 154, 156 пучка; суммарные данные по пучку одного из формирователей 154, 156 пучка сравниваются с данными другого, чтобы вычислить коэффициент корреляции; коэффициенты корреляции упорядочиваются по глубине формирования изображения в осевом направлении и латерально относительно направления пучка; а коэффициенты фильтруются посредством ФНЧ и сглаживаются, чтобы завершить карту , как на этапах S310-S350 (этап S612).
На ФИГ. 6В представлено более подробное описание определения граничной линии на этапе S530. Текущему направлению и текущей глубине формирования изображения соответственно присваиваются начальные значения первого направления и первой глубины. Подсчетам глубины, направления и когерентности присваиваются нулевые начальные значения (этап S616). Если текущий коэффициент корреляции на готовой карте превышает заранее заданный порог (S618) корреляции, считается, что существует заранее заданный уровень когерентности для этого местоположения  , а подсчет когерентности увеличивается (этап S620). В любом случае, если следующая глубина формирования изображения существует (этап S624), подсчет глубины увеличивается (этап S628), и осуществляется возврат к этапу S618. Если, с другой стороны, следующая глубина формирования изображения не существует (этап S624), подсчет глубины сбрасывается (этап S630), и осуществляется запрос в отношении того, превышает ли подсчет когерентности заранее заданный порог квалификации, т.е., достаточное ли число коэффициентов корреляции для соответствующих глубин формирования изображения вдоль текущего направления, каждый из которых показывает достаточно высокую корреляцию (этап S632). Если порог квалификации превышен (этап S632), то считается, что направление соответствует требованиям (этап S636). В любом случае, если соседнее направление существует (этап S640), подсчет направлений увеличивается (этап S644), и осуществляется возврат к этапу S618. В противном случае, если нет соседнего направления (этап S640), граничные линии устанавливаются в крайнее левое и крайнее правое ограничивающие направления для пространственного ограничения блокирования (этап S648). Граничные линии на ФИГ. 2 являются знаками 244, 248.
, а подсчет когерентности увеличивается (этап S620). В любом случае, если следующая глубина формирования изображения существует (этап S624), подсчет глубины увеличивается (этап S628), и осуществляется возврат к этапу S618. Если, с другой стороны, следующая глубина формирования изображения не существует (этап S624), подсчет глубины сбрасывается (этап S630), и осуществляется запрос в отношении того, превышает ли подсчет когерентности заранее заданный порог квалификации, т.е., достаточное ли число коэффициентов корреляции для соответствующих глубин формирования изображения вдоль текущего направления, каждый из которых показывает достаточно высокую корреляцию (этап S632). Если порог квалификации превышен (этап S632), то считается, что направление соответствует требованиям (этап S636). В любом случае, если соседнее направление существует (этап S640), подсчет направлений увеличивается (этап S644), и осуществляется возврат к этапу S618. В противном случае, если нет соседнего направления (этап S640), граничные линии устанавливаются в крайнее левое и крайнее правое ограничивающие направления для пространственного ограничения блокирования (этап S648). Граничные линии на ФИГ. 2 являются знаками 244, 248.
В качестве альтернативы к обработке линии за линией корреляционной карты изображение может быть получено из карты посредством обработки изображения или морфологической обработки, такой как подобное преобразование/морфологическое сужение, которое отвергает резко отклоняющиеся значения и/или подавляет ошибку. После обработки знаки 244, 248 представляют собой линии, обрамляющие область вывода. Они будут явно указывать на экране пользователю направления пучка, лежащие вне знаков, т.е., в которых пучки блокируются, как теперь подтверждено отсутствием когерентности данных изображения вдоль пучка.
На ФИГ. 6C представлено более подробное описание обновления или обновление отображения на экране на этапе S550. Как ультразвуковое изображение 204, так и знаки 244, 248 обновляются для текущей проекции на экране (этап S652). После предыдущего обновления перемещение поля 216 обзора может осуществиться либо посредством перемещения зонда, либо вращением плоскости формирования изображения. Таким образом, буфер кадра обновляется не только вместе с текущей получаемой ультразвуковой визуализацией для отображения ультразвукового изображения, но и вместе с графикой, такой как знаки 244, 248 в качестве графических накладок. Текущая проекция на экране может таким образом иметь одно или более изображений 204 в форме веера с соответствующими им знаками 244, 248. Постоянный указатель доли выборочных местоположений в пределах поля 216 обзора, которые имеют достоверные данные, также отображается на экране (этап S656), после обновления отображения до текущего значения. Более конкретно, подсчет когерентности, который повторно увеличивался на этапе S620, делится на общее число выборочных местоположений для вычисления доли.
Альтернатива вышеописанной оценке когерентности состоит в использовании фактора когерентности, рассчитанного путем обработки комплексных данных канала. Фактор когерентности определяется как
 ,
,
где r глубина вдоль направления пучка, направление пучка,  комплексные данные канала на глубине r, принятые j-ым каналом после применения задержки фокусировки, а N число каналов. Выражение
комплексные данные канала на глубине r, принятые j-ым каналом после применения задержки фокусировки, а N число каналов. Выражение  (или
(или  ) в числителе представляет изображение как функцию r и после согласованного формирования пучка, но до сканирующего преобразования и логарифмического сжатия. Требуется не более, чем один формирователь пучка
) в числителе представляет изображение как функцию r и после согласованного формирования пучка, но до сканирующего преобразования и логарифмического сжатия. Требуется не более, чем один формирователь пучка  заменяет коэффициент корреляции в определении отображения в виде карты и знака, которые обсуждались выше.
заменяет коэффициент корреляции в определении отображения в виде карты и знака, которые обсуждались выше.
В описанных выше вариантах осуществления предполагается, что непрерывное получение ультразвука сопровождается непрерывным обновлением отображения на экране. Альтернативно, отображение на экране может обновляться только тогда, когда изменяется поле 216 обзора. Таким образом, обновление может откликаться на перемещение зонда, обнаруживаемого с помощью интегрированного электромагнитного (ЭМ) датчика, а также на перемещение плоскости изображения, такого как вращение. Пример такого ЭМ-датчика представлен в патенте США № 7933007, Stanton и др., полное раскрытие которого включено в настоящий документ по ссылке.
Интерактивный инструмент визуального наведения для получения изображения и системы отображения, который выполнен с возможностью навигации пользователя по отношению к блокированию поля обзора, обнаруживает и пространственно ограничивает блокирование. Он также объединяет знак, который визуально представляет указание границ, с изображением для совместной визуализации. Упомянутый знак динамически перемещается в соответствии с перемещением по отношению к упомянутому блокированию полю обзора. Упомянутый знак может иметь форму отрезка прямой, или два знака могут быть объединены в форме «V» для обрамления неблокированной области. Упомянутое ограничение может быть основано на определении того, блокированы ли ультразвуковые пучки в соответствующих направлениях. Для получения изображения в некоторые варианты осуществления включены каналы формирования изображения для приема данных изображения, для которых вычисляется мера когерентности, т.е., сходство между данными канала. Упомянутое определение для некоторого направления основывается на упомянутой мере для местоположений в этом направлении. Одно применение состоит в навигации ультразвукового зонда между блокирующими ребрами для достижения стандартной сердечной проекции.
В дополнение к осуществлению диагностического сердечного исследования, выполняемого медсестрами или другими врачами, которые могут быть неподготовленным в частности, в эхографии, интерактивный инструмент 108 визуального наведения может направлять начинающих сонографистов. Инструмент 108 может отличать для этой цели или этом режиме нормальную (в оттенках серого) сонограмму, наряду с визуальной обратной связью, описываемой в настоящем документе выше. Альтернативно, новая визуальная обратная связь инструмента 108 может ускорить рабочий процесс подготовленных или опытных сонографистов. Ультразвуковой аппарат 100 с техническим интерактивным наведением, который включает в себя инструмент 108, может содержать более полную интерактивную систему для визуального наведения такую, как та, что раскрыта в принадлежащей Radulescu и др. патентной заявке под названием «Anatomically Intelligent Echocardiography for Point-of-Care».
Хотя изобретение было проиллюстрировано и подробно описано на чертежах и предшествующем описании, такие иллюстрации и описание должны рассматриваться как иллюстративные или приведенные в качестве примера, а не ограничивающие; изобретение не ограничивается описанными вариантами осуществления.
Например, вместо меток на «V», могут использоваться указывающие наружу стрелки.
Изучив рисунки, раскрытие, и приложенную формулу изобретения, специалисты в данной области смогут понять и осуществить при практической реализации заявленного изобретения другие вариации показанных вариантов осуществления. В формуле изобретения слово «содержит» не исключает других элементов или этапов, а формы единственного числа не исключают множественного числа. Любые ссылочные позиции в формуле изобретения не следует рассматривать в качестве ограничения объема.
Компьютерная программа может быть сохранена кратковременно, временно или в течение более длительного периода времени на соответствующем машиночитаемом носителе, таком как оптический носитель или твердотельный носитель. Такой носитель является невременным только в том смысле, что не является временным, распространяющим сигнал, но включает в себя и другие формы машиночитаемых носителей, таких как регистровая память, кэш процессора, ОЗУ и другая энергонезависимая память.
Один процессор или другой блок может выполнить функции нескольких пунктов перечисленных в формуле изобретения. Сам факт того, что определенные меры перечислены во взаимно отличных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих мер нельзя использовать с пользой.
Изобретение относится к эхокардиографии, а именно к отслеживанию пространственного предела визуального блокирования. Интерактивный инструмент визуального наведения для прибора содержит устройство отображения, зонд формирования изображения, модуль воспроизведения проекции, выполненный с возможностью представления на устройстве отображения изображения, причем инструмент выполнен с возможностью навигации пользователя по отношению к блокированию поля обзора и содержит блокировочный модуль, выполненный с возможностью обнаружения и пространственного ограничения упомянутого блокирования; и процессор отслеживания разграничения, выполненный с возможностью объединения знака, визуально представляющего указание границ, с изображением для совместной визуализации на устройстве отображения. Также инструмент выполнен с возможностью динамического перемещения знака в соответствии с движением поля обзора относительно блокирования поля обзора, в котором знак имеет форму отрезка прямой, а процессор дополнительно выполнен с возможностью объединения второго знака с ультразвуковым изображением для совместной визуализации на устройстве отображения, причем инструмент дополнительно выполнен с возможностью динамического перемещения второго знака в соответствии с движением поля обзора относительно блокирования поля обзора, в котором знаки совместно представляют собой V-образную форму для обрамления областей блокирования на ультразвуковом изображении. Использование изобретения позволяет в режиме реального времени направлять и тренировать неопытных или менее опытных пользователей в позиционировании зонда для оптимального качества изображения. 12 з.п. ф-лы, 6 ил.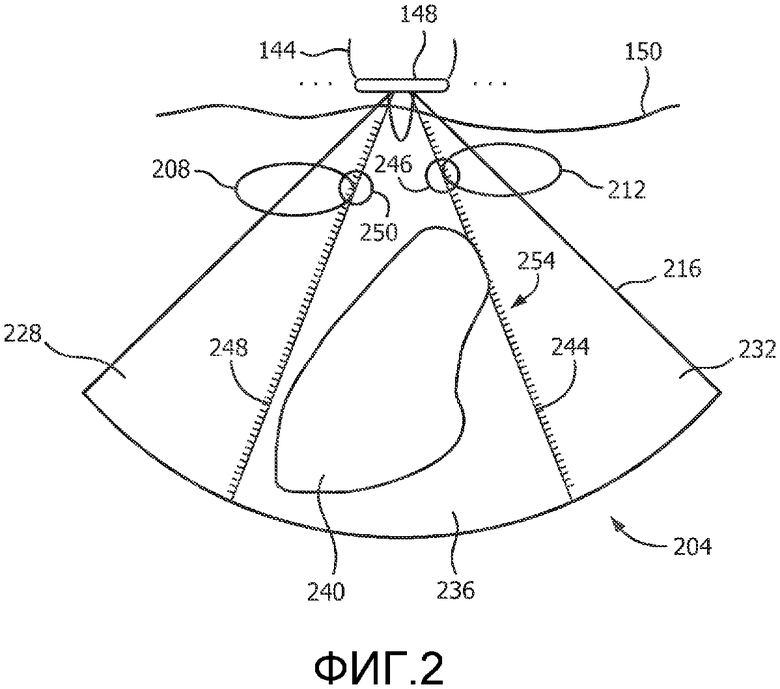
1. Интерактивный инструмент (108) визуального наведения для прибора, содержащий устройство (128) отображения; зонд (144) формирования изображения и модуль (132) воспроизведения проекции, выполненный с возможностью представления на упомянутом устройстве отображения ультразвукового изображения (428, 432), полученного с помощью упомянутого зонда, причем упомянутый инструмент выполнен с возможностью навигации (S520-S570) пользователя по отношению к блокированию поля обзора, упомянутый инструмент содержит:
блокировочный модуль (112), выполненный с возможностью обнаружения и пространственного ограничения упомянутого блокирования; и
отличающийся тем, что
процессор (116) отслеживания разграничения выполнен с возможностью объединения знака, визуально представляющего упомянутое пространственное ограничение модулем (112) блокирования, с упомянутым ультразвуковым изображением для совместной визуализации на упомянутом устройстве отображения,
упомянутый инструмент выполнен с возможностью динамического перемещения упомянутого знака в соответствии с движением упомянутого поля обзора относительно упомянутого блокирования,
причем упомянутый знак (244) имеет форму отрезка прямой, причем упомянутый процессор дополнительно выполнен с возможностью объединения второго знака (248), имеющего форму отрезка прямой, визуально представляющего упомянутое указание границ, с упомянутым ультразвуковым изображением для совместной визуализации на упомянутом устройстве отображения, причем упомянутый инструмент дополнительно выполнен с возможностью динамического перемещения упомянутого второго знака в соответствии с движением упомянутого поля обзора относительно упомянутого блокирования, причем упомянутые знаки совместно представляют собой V-образную форму для обрамления областей блокирования на ультразвуковом изображении.
2. Инструмент по п. 1, дополнительно содержащий для получения упомянутого изображения множество каналов (410) формирования изображения для приема с помощью упомянутого зонда данных изображения, к которым применены задержки фокусирования, причем упомянутый блокировочный модуль дополнительно выполнен с возможностью вычисления меры сходства между данными, принятыми по упомянутым множественным каналам с упомянутыми примененными задержками, причем ограничение основано на упомянутой мере.
3. Инструмент по п. 2, причем упомянутая мера (S330) служит подтверждением корреляции между суммарными данными по пучку с различными апертурами, причем упомянутые множественные каналы разделены между упомянутыми апертурами.
4. Инструмент по п. 3, причем упомянутые апертуры (404, 408) являются чередующимися комплементарными апертурами.
5. Инструмент по п. 4, причем упомянутые каналы случайным образом разделены между упомянутыми апертурами.
6. Инструмент по п. 1, причем упомянутый блокировочный модуль дополнительно выполнен с возможностью определения того, блокированы ли ультразвуковые пучки в соответствующих направлениях, причем упомянутое ограничение (S648) основывается на результате упомянутого определения.
7. Инструмент по п. 6, дополнительно содержащий для получения упомянутого изображения множество каналов получения изображения для приема данных изображения с помощью упомянутого зонда, причем упомянутый блокировочный модуль (112) дополнительно выполнен с возможностью вычисления меры когерентности упомянутых данных, принятых по упомянутым множественным каналам, причем упомянутое определение для некоторого направления из числа упомянутых направлений основывается на упомянутой мере для местоположений в упомянутом направлении.
8. Инструмент по п. 7, причем упомянутое определение в некотором направлении из числа упомянутых направлений основано на том, показывает ли упомянутая мера заранее заданный уровень когерентности для, по меньшей мере, заранее заданного числа местоположений в упомянутом направлении, для которых была рассчитана (S632) упомянутая мера.
9. Инструмент по п. 1, причем упомянутое поле обзора является V-образным с концом V на упомянутом зонде (144).
10. Инструмент по п. 1, причем упомянутый знак представляет пространственную границу упомянутого блокирования (228, 232).
11. Инструмент по п. 1, причем упомянутое объединение содержит добавление к упомянутому изображению цвета в качестве упомянутого знака.
12. Инструмент по п. 1, причем упомянутое изображение (204) имеет форму сектора круга.
13. Инструмент по п. 1, причем упомянутый зонд является матричным зондом, упомянутое поле обзора (216) является трехмерным, причем в отношении одного и того же положения зонда упомянутый процессор дополнительно выполнен с возможностью объединения другого знака с другим изображением для совместной визуализации на упомянутом устройстве отображения, причем упомянутое другое изображение представляет другую плоскость изображения, чем плоскость упомянутого ультразвукового изображения, упомянутый инструмент дополнительно выполнен с возможностью динамического перемещения упомянутого другого знака в соответствии с движением упомянутого поля обзора относительно блокирования в упомянутой другой плоскости изображения.
| LOVSTAKKEN L | |||
| "Real-time Indication of Acoustic Window for Phased-Array Transducers in Ultrasound Imaging", ULTRASONICS SYMPOSIUM, IEEE, 01.10.2007 | |||
| US 2009141957 A1, 04.06.2009 | |||
| US 2012277589 A1, 01.11.2012 | |||
| RU 2010124373 A, 27.12.2011. |

