ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Изобретение в основном относится к устройству и способу регулирования системы привода от электродвигателя. Более конкретно изобретение относится к устройству и способу регулирования системы привода от электродвигателя, которая преобразует напряжение постоянного тока в напряжение переменного тока, используя инвертор, для привода и регулирования электродвигателя переменного тока.
2. Описание известного уровня техники
[0002] Общеизвестна система привода от электродвигателя, которая преобразует напряжение постоянного тока в напряжение переменного тока, используя инвертор, для привода и регулирования трехфазного электродвигателя переменного тока. В таких системах привода от электродвигателя были предложены различные режимы регулирования для соответствующего регулирования вращающего момента электродвигателя переменного тока на заданный вращающий момент (значение команды вращающего момента).
[0003] Например, в публикации японской патентной заявки №JP-А-2005-124359 приводится описание способа, согласно которому при регулировании тока синхронного электродвигателя в цепи обратной связи по току используется токовый сигнал, оцениваемый контрольным устройством, имеющим поправочный член, который служит для корректировки ошибки между фактической и расчетной частотой вращения. При регулировании тока на основании значения команды для тока, обеспечивающего заданный вращающий момент (значения команды для тока Id по оси d), и сигнала обратной связи по току вырабатывается команда для напряжения, обеспечивающего заданный вращающий момент. Согласно публикации японской патентной заявки №JP-A-2005-124359 напряжение, подаваемое на каждую фазу синхронного электродвигателя (электродвигателя переменного тока), вырабатывается в соответствии с вышеупомянутой обратной связью по току посредством операции переключения, выполняемой в инверторе, в соответствии с регулированием посредством широтно-импульсной модуляции (ШИМ-PWM-pulse-width modulation). Для эффективного привода электродвигателя ШИМ-регулирование обычно осуществляется посредством выполнения векторного управления.
[0004] Однако при помощи ШИМ-регулирования достигается лишь ограниченное напряжение основной гармоники. Поэтому в публикации японской патентной заявки №JP-A-11-299297 дается описание переключения режима регулирования электродвигателя в зависимости от ситуации между нормальным режимом ШИМ-регулирования и режимом регулирования, в котором на электродвигатель подается прямоугольно-импульсное напряжение с коэффициентом заполнения ШИМ, зафиксированным на максимальном значении, а выходной вращающий момент электродвигателя регулируется посредством регулирования фазы прямоугольно-импульсного напряжения (режим регулирования прямоугольно-импульсного напряжения).
[0005] В соответствии с режимом регулирования электродвигателя, описанным в публикации японской патентной заявки №JP-A-2005-124359, регулирование может быть выполнено более эффективно, поскольку электрический ток точно измеряется, и в индуцируемое напряжение вносится поправка. Однако режим регулирования электродвигателя зафиксирован на режиме ШИМ-регулирования. Соответственно, вне зависимости от рабочего состояния электродвигателя, получить большую выходную мощность всегда затруднительно.
[0006] Для устранения этого неудобства в публикации японской патентной заявки №JP-A-11-299297 дается описание переключения режима регулирования электродвигателя между режимом ШИМ-регулирования и режимом регулирования прямоугольно-импульсного напряжения. В такой конфигурации необходимо принимать некоторые меры для того, чтобы при переключении режима регулирования в выходном вращающем моменте электродвигателя не возникали флуктуации. Однако в публикации японской патентной заявки JP-A-11-299297 описание таких мер отсутствует.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0007] Настоящее изобретение сделано в свете вышеописанных обстоятельств. Поэтому изобретение предусматривает устройство и способ регулирования системы привода от электродвигателя, имеющей конфигурацию регулирования, в которой режим регулирования переключается между режимом регулирования с широтно-импульсной модуляцией (ШИМ) и режимом регулирования прямоугольно-импульсного напряжения, при этом указанные устройство и способ регулирования позволяют соответственно регулировать выходной вращающий момент, когда происходит переключение режима регулирования.
[0008] Первый аспект настоящего изобретения относится к устройству регулирования системы привода от электродвигателя, включающей инвертор, который запускает электродвигатель переменного тока. Устройство регулирования включает датчик тока, датчик положения, средство выбора режима регулирования, первое средство регулирования электродвигателя и второе средство регулирования электродвигателя. Датчик тока измеряет ток электродвигателя, протекающий в электродвигателе переменного тока. Датчик положения измеряет угловое положение электродвигателя переменного тока. Средство выбора режима регулирования выбирает режим регулирования для преобразования напряжения, выполняемого в инверторе, исходя из рабочего состояния электродвигателя переменного тока. Когда средство выбора режима регулирования выбирает первый режим регулирования, в котором на электродвигатель переменного тока подается прямоугольно-импульсное напряжение, то первое средство регулирования электродвигателя осуществляет регулирование вращающего момента посредством регулирования обратной связи, при котором фаза прямоугольно-импульсного напряжения корректируется на основании отклонения выходного вращающего момента электродвигателя переменного тока от заданного значения вращающего момента. Когда средство выбора режима регулирования выбирает второй режим регулирования, при котором напряжение, подаваемое на электродвигатель переменного тока, регулируется в режиме широтно-импульсной модуляции, то второе средство регулирования электродвигателя осуществляет регулирование вращающего момента посредством регулирования обратной связи по току электродвигателя на основании заданного значения тока, соответствующего заданному значению вращающего момента. Второе средство регулирования электродвигателя осуществляет регулирование обратной связи по току электродвигателя на основании выходных сигналов от датчика тока и датчика положения. Первое средство регулирования электродвигателя включает первое средство оценки вращающего момента, средств регулирования фазы напряжения и первое средство регулирования напряжения. Первое средство оценки вращающего момента оценивает выходной вращающий момент электродвигателя переменного тока на основании выходных сигналов от датчика тока и датчика положения. Средство регулирования фазы напряжения определяет фазу прямоугольно-импульсного напряжения на основании отклонения результата оценки вращающего момента первым средством оценки вращающего момента от заданного значения вращающего момента. Первое средство регулирования напряжения регулирует преобразование напряжения, выполняемое в инверторе, таким образом, что на электродвигатель переменного тока подается прямоугольно-импульсное напряжение с фазой, определенной средством регулирования фазы напряжения.
[0009] Второй аспект настоящего изобретения относится к способу регулирования системы привода от электродвигателя, включающей инвертор, который запускает электродвигатель переменного тока. В соответствии с данным способом регулирования измеряется ток электродвигателя, протекающий в электродвигателе переменного тока, измеряется угловое положение электродвигателя переменного тока и, исходя из рабочего состояния электродвигателя переменного тока, выбирается режим регулирования для выполняемого в инверторе преобразования напряжения. Когда выбирается первый режим регулирования, при котором в электродвигатель переменного тока подается прямоугольно-импульсное напряжение, регулирование вращающего момента выполняется посредством регулирования обратной связи, при котором фаза прямоугольно-импульсного напряжения корректируется на основании отклонения выходного вращающего момента электродвигателя переменного тока от заданного значения вращающего момента. В это время на основании выходных сигналов от датчика тока и датчика положения оценивается выходной вращающий момент электродвигателя переменного тока, на основании отклонения результата оценки вращающего момента от заданного значения вращающего момента определяется фаза прямоугольно-импульсного напряжения и регулируется выполняемое в инверторе преобразование напряжения, так что в электродвигатель переменного тока подается прямоугольно-импульсное напряжение с определенной фазой. Когда выбирается второй режим регулирования, при котором напряжение, подаваемое на электродвигатель переменного тока, регулируется в режиме широтно-импульсной модуляции, регулирование вращающего момента выполняется посредством регулирования обратной связи по току электродвигателя на основании заданного значения тока, соответствующего заданному значению вращающего момента. В это время выполняется регулирование обратной связи по току электродвигателя на основании измеренного тока электродвигателя и измеренного углового положения.
[0010] При помощи рассмотренных выше устройства и способа регулирования системы привода от электродвигателя, и в первом режиме регулирования электродвигателя, представляющем собой режим регулирования прямоугольно-импульсного напряжения, и во втором режим регулирования электродвигателя, представляющем собой режим ШИМ-регулирования, регулирование вращающего момента выполняется посредством выполнения регулирования обратной связи с использованием выходных сигналов от датчика тока и датчика положения в качестве количественной оценки состояния электродвигателя. Соответственно, количественная оценка состояния (выходные сигналы от датчиков), используемая для регулирования электродвигателя, между режимами регулирования не изменяется. Следовательно, при переключении режима регулирования выходной вращающий момент регулируется должным образом. В частности, можно предотвратить ступенчатые флуктуации вращающего момента из-за погрешности при измерении указанным датчиком.
[0011] Датчик тока может быть предусмотрен таким образом, чтобы он измерял токи, протекающие в соответствующих фазах электродвигателя переменного тока. Кроме того, первое средство оценки вращающего момента может оценивать выходной вращающий момент электродвигателя переменного тока на основании тока по оси d и тока по оси q, которые вычисляются на основании выходных сигналов датчика тока и датчика положения.
[0012] Выходной вращающий момент электродвигателя переменного тока может быть оценен на основании токов по оси d и по оси q электродвигателя переменного тока.
[0013] Посредством рассмотренных выше устройства и способа регулирования системы привода от электродвигателя, в первом режиме регулирования электродвигателя, который является режимом регулирования прямоугольно-импульсного напряжения, выходной вращающий момент электродвигателя переменного тока оценивается на основании тока по оси d (тока Id) и тока по оси q (тока Iq) при векторном регулировании, которое обычно используется во втором режиме регулирования, которое является режимом ШИМ-регулирования. Таким образом, регулирование прямоугольно-импульсного напряжения выполняется аналогично тому, как выполняется ШИМ-регулирование.
[0014] Кроме того, первое средство оценки вращающего момента может оценивать выходной вращающий момент электродвигателя переменного тока на основании токов по оси d и по оси q и постоянной электродвигателя для электродвигателя переменного тока, а устройство регулирования может дополнительно включать средство коррекции постоянной для коррекции постоянной электродвигателя на основании тока по оси d и тока по оси q.
[0015] Выходной вращающий момент электродвигателя переменного тока может быть оценен на основании токов по оси d и по оси q и постоянной электродвигателя для электродвигателя переменного тока, а постоянная электродвигателя может корректироваться на основании тока по оси d и тока по оси q.
[0016] Посредством рассмотренных выше устройства и способа регулирования системы привода от электродвигателя, выходной вращающий момент электродвигателя переменного тока оценивается после изменения постоянной электродвигателя (более конкретно, индуктивности по оси d и индуктивности по оси q) из-за изменения тока электродвигателя (тока по оси d и тока по оси q) для его корректировки. Таким образом, точность оценки вращающего момента в режиме регулирования прямоугольно-импульсного напряжения повышается и соответственно вращающий момент регулируется более точно.
[0017] В устройстве регулирования согласно первому аспекту изобретения второе средство регулирования электродвигателя может включать второе средство оценки вращающего момента, средство изменения заданного значения вращающего момента, средство выработки команды тока и второе средство регулирования напряжения. Второе средство оценки вращающего момента оценивает выходной вращающий момент электродвигателя переменного тока на основании выходных сигналов от датчика тока и датчика положения аналогично тому, каким образом первое средство оценки вращающего момента оценивает выходной вращающий момент электродвигателя переменного тока. Средство изменения заданного значения вращающего момента изменяет заданное значение вращающего момента на основании отклонения вращающего момента, оцененного посредством второго средства оценки вращающего момента, от заданного значения вращающего момента. Средство выработки команды тока вырабатывает заданное значение тока на основании заданного значения вращающего момента, измененного с помощью средства изменения заданного значения вращающего момента. Второе средство регулирования напряжения регулирует выполняемое в инверторе преобразование напряжения таким образом, что напряжение, подаваемое на электродвигатель переменного тока, регулируется на основании отклонения тока электродвигателя, основанного на значении, измеряемом датчиком тока, от заданного значения тока, выработанного средством выработки команды тока.
[0018] Когда выбирается второй способ регулирования, выходной вращающий момент электродвигателя переменного тока может быть оценен на основании измеренного тока электродвигателя и измеренного углового положения аналогично вышеописанной оценке вращающего момента, а заданное значение вращающего момента может быть изменено на основании отклонения оцененного вращающего момента от заданного значения вращающего момента. Затем, заданное значение тока может быть выработано на основании измененного заданного значения вращающего момента, и выполняемое в инверторе преобразование напряжения может регулироваться таким образом, что напряжение, подаваемое на электродвигатель переменного тока, регулируется на основании отклонения измеренного тока электродвигателя от выработанного заданного значения тока.
[0019] В рассмотренных выше устройстве и способе регулирования системы привода от электродвигателя, даже в режиме ШИМ-регулирования, регулирование обратной связи по току электродвигателя выполняется на основании отклонения вращающего момента, так же как в случае режима регулирования прямоугольно-импульсного напряжения. Таким образом, ток электродвигателя регулируется так, что компенсируется изменение выходных характеристик электродвигателя из-за изменения температуры. В результате флуктуации вращающего момента предотвращаются без применения датчика температуры и т.п. Кроме того, и в режиме ШИМ-регулирования, и в режиме регулирования прямоугольно-импульсного напряжения вращающий момент регулирования обратной связи выполняется с использованием выходного вращающего момента, оцениваемого способом, общим для этих режимов регулирования. В результате возможно еще более надежно предотвращать флуктуации вращающего момента, которые с большой вероятностью возникают при переключении режима регулирования.
[0020] Второй режим регулирования может включать режим синусоидальной широтно-импульсной модуляции, в котором частота модуляции лежит в диапазоне от 0 до 0,61, и режим широтно-импульсной перемодуляции, в котором основная гармоника искажается, так что частота модуляции лежит в диапазоне от 0,61 до 0,78.
[0021] В рассмотренных выше устройстве и способе регулирования системы привода от электродвигателя режим регулирования переключается между обычным режимом регулирования посредством синусоидальной широтно-импульсной модуляции (ШИМ), режимом ШИМ-регулирования посредством перемодуляции и режимом регулирования прямоугольно-импульсного напряжения на основании рабочего состояния (как правило, вращающего момента и состояния вращения) электродвигателя переменного тока. В результате выходная мощность электродвигателя переменного тока в диапазонах средних и высоких скоростей вращения возрастает.
[0022] Третий аспект настоящего изобретения относится к устройству регулирования системы привода от электродвигателя, включающей инвертор, который запускает электродвигатель переменного тока. Устройство регулирования включает средство выбора режима регулирования и средство регулирования множества режимов регулирования электродвигателя. Средство выбора режима регулирования выбирает режим регулирования инвертора из множества режимов регулирования на основании рабочего состояния электродвигателя переменного тока. Средство регулирования множества режимов регулирования электродвигателя предусматривается таким образом, чтобы оно отвечало соответствующему множеству режимов регулирования и регулировало выходной вращающий момент электродвигателя переменного тока в режиме регулирования, выбранном средством выбора режима регулирования. Для регулирования выходного вращающего момента электродвигателя переменного тока используется оцененный выходной вращающий момент, а оценка выходного вращающего момента выполняется способом, общим для множества режимов регулирования в средстве регулирования электродвигателя.
[0023] Четвертый аспект настоящего изобретения относится к способу регулирования системы привода от электродвигателя, включающей инвертор, который запускает электродвигатель переменного тока. В соответствии с данным способом регулирования режим регулирования инвертора выбирается из множества режимов регулирования на основании рабочего состояния электродвигателя переменного тока и выходной вращающий момент электродвигателя переменного тока регулируется в выбранном режиме регулирования. Для регулирования выходного вращающего момента электродвигателя переменного тока используется оцененный выходной вращающий момент, а оценка выходного вращающего момента электродвигателя выполняется способом, общим для множества режимов регулирования.
[0024] В рассмотренных выше устройстве и способе регулирования системы привода от электродвигателя способ оценки вращающего момента является общим для множества режимов регулирования, в которых регулирование вращающего момента выполняется с использованием оцененного выходного вращающего момента. Соответственно, возможно предотвратить флуктуации вращающего момента, которые с большой вероятностью возникают при переключении режима регулирования.
[0025] Электродвигатель переменного тока может быть электродвигателем с постоянным магнитом, в котором постоянный магнит закреплен на роторе.
[0026] В рассмотренном выше устройстве регулирования системы привода от электродвигателя в конфигурации, когда потребителем электроэнергии является электродвигатель с постоянным магнитом, который удобен для уменьшения размеров и повышения КПД, компенсируется изменение выходных характеристик электродвигателя благодаря изменению температуры постоянного магнита. В результате предотвращаются флуктуации вращающего момента.
[0027] Настоящее изобретение предусматривает устройство и способ регулирования системы привода от электродвигателя, имеющей конфигурацию системы регулирования, в которой режим регулирования переключается между режимом регулирования посредством широтно-импульсной модуляции (ШИМ) и режим регулирования прямоугольно-импульсного напряжения, при этом указанные устройство и способ регулирования позволяют предотвратить флуктуации выходного вращающего момента, возникающие с большой вероятностью при переключении режима регулирования, благодаря чему вращающий момент регулируется надлежащим образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0028] Отличительные особенности, преимущества, а также техническое и промышленное значение изобретения будут более понятны при изучении последующего подробного описания предпочтительного примера осуществления настоящего изобретения со ссылками на прилагаемые чертежи.
На фиг.1 представлен вид, отображающий полную конфигурацию системы привода от электродвигателя в соответствии с одним из примеров осуществления настоящего изобретения.
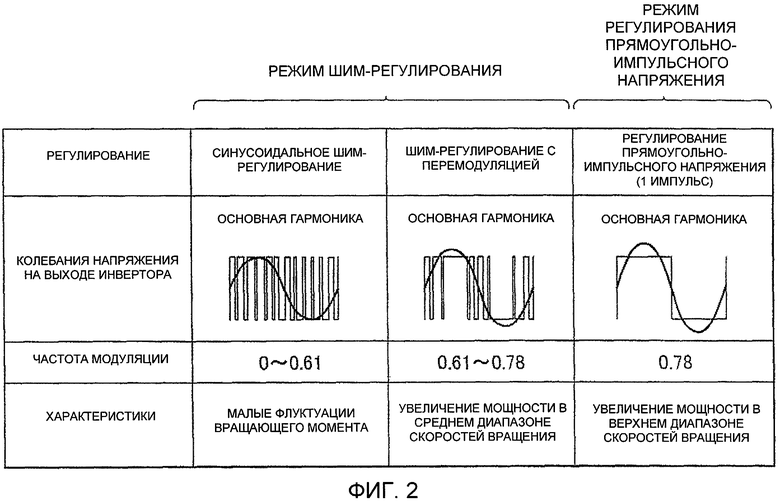
На фиг.2 представлена таблица режимов регулирования, используемых в системе привода от электродвигателя в соответствии с данным примером осуществления настоящего изобретения.
На фиг.3 показана блок-схема выбора режима регулирования.
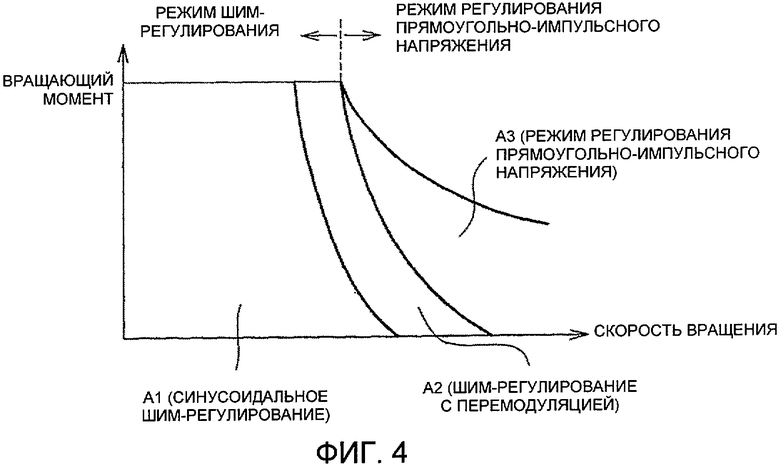
На фиг.4 представлен график, отображающий способ переключения режимов регулирования на основании рабочего состояния электродвигателя.
На фиг.5 показана блок-схема регулирования, когда в системе привода от электродвигателя в соответствии с данным примером осуществления настоящего изобретения используется режим ШИМ-регулирования (режим синусоидального ШИМ-регулирования и режим ШИМ-регулирования с перемодуляцей).
На фиг.6 показана блок-схема регулирования, когда в системе привода от электродвигателя в соответствии с данным примером осуществления настоящего изобретения используется режим регулирования прямоугольно-импульсного напряжения.
На фиг.7 показана первая блок-схема, на которой изображен пример конфигурации части, выполняющей вычисление вращающего момента.
На фиг.8 представлен график, отображающий изменения константы электродвигателя относительно тока электродвигателя в уравнении для вычисления вращающего момента.
На фиг.9 показана вторая блок-схема, на которой изображен другой пример конфигурации части, выполняющей вычисление вращающего момента.
На фиг.10 показана блок-схема регулирования, на которой изображен режим регулирования прямоугольно-импульсного напряжения, использованный как сравнительный пример.
На фиг.11 представлен график, отображающий способ изменения выходного вращающего момента при переключении режимов регулирования.
На фиг.12 показана блок-схема регулирования, когда в системе привода от электродвигателя в соответствии с данным примером осуществления настоящего изобретения используется режим ШИМ-регулирования.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ПРИМЕРА ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0029] В последующем описании и на прилагаемых чертежах будет более подробно рассмотрено настоящее изобретение со ссылками на предпочтительный пример его осуществления. Одинаковые или соответствующие части будут обозначаться одними и теми же ссылочными номерами, и в основном будут рассматриваться только один раз.
[0030] На фиг.1 представлен вид, на котором показана полная конфигурация блока привода от электродвигателя в соответствии с одним из примеров осуществления настоящего изобретения. Как показано на фиг.1, система 100 привода от электродвигателя согласно данному примеру осуществления настоящего изобретения включает часть 10# для генерирования напряжения постоянного тока, сглаживающий конденсатор С0, инвертор 14 и электродвигатель M1 переменного тока.
[0031] Электродвигатель M1 переменного тока является приводным электродвигателем, который создает вращающий момент для привода ведущих колес гибридного транспортного средства или электромобиля. Альтернативно, электродвигатель M1 переменного тока может быть сконфигурирован для работы в качестве электрогенератора с приводом от двигателя внутреннего сгорания. Электродвигатель M1 переменного тока может быть сконфигурирован для работы как в качестве электродвигателя, так и электрогенератора. Электродвигатель M1 переменного тока может работать в качестве электродвигателя для двигателя внутреннего сгорания и быть смонтирован на гибридном транспортном средстве как компонент для запуска двигателя внутреннего сгорания.
[0032] Часть 10# для генерирования напряжения постоянного тока включает источник В питания постоянного тока, который может быть заряжен электроэнергией, системные реле SR1 и SR2, сглаживающий конденсатор С1 и повышающий/понижающий преобразователь 12.
[0033] Источник В питания постоянного тока может быть образован аккумуляторной батареей, например, никель-металлогибридной или литий-ионной аккумуляторной батареей. Альтернативно, источник В питания постоянного тока может быть образован таким устройством хранения электроэнергии, как конденсатор с двойным электрическим слоем (ионистор). Напряжение Vb постоянного тока на выходе источника В питания постоянного тока измеряется датчиком 10 напряжения. Датчик 10 напряжения выдает сигнал, индицирующий напряжение Vb постоянного тока, в блок 30 управления.
[0034] Системное реле SRI обеспечивает соединение между положительной клеммой источника В питания постоянного тока и линией 6 электропитания. Системное реле SR2 обеспечивает соединение между отрицательной клеммой источника В питания постоянного тока и кабелем 5 заземления. Системные реле SRI и SR2 активируются/деактивируются в ответ на сигнал SE из блока 30 управления. Более конкретно, системные реле SRI и SR2 активируются в ответ на высокий логический уровень сигнала SE из блока управления 30 и деактивируются в ответ на низкий логический уровень сигнала SE из блока 30 управления. Сглаживающий конденсатор С1 устанавливается между линией 6 электропитания и кабелем 5 заземления и подсоединяется к линии 6 электропитания и кабелю 5 заземления.
[0035] Повышающий/понижающий преобразователь 12 включает катушку L1 индуктивности, силовые полупроводниковые переключательные элементы Q1 и Q2 и диоды D1 и D2.
[0036] Силовые полупроводниковые переключательные элементы Q1 и Q2 устанавливаются между линией 7 электропитания и кабелем 5 заземления и подсоединяются к линии 7 электропитания и кабелю 5 заземления, а друг с другом соединяются последовательно. Силовые полупроводниковые переключательные элементы Q1 и Q2 активируются/деактивируются в ответ на сигналы S1 и S2 переключения соответственно из блока 30 управления.
[0037] Примерами силовых полупроводниковых переключательных элементов (далее называемых просто "переключательные элементы"), которые могут быть использованы в данном примере осуществления настоящего изобретения, являются биполярный транзистор с изолированным затвором, силовой МОП-транзистор (МОП - "металл - оксид - полупроводник" - MOS - Metal Oxide Semiconductor) и силовой биполярный транзистор. Встречно-параллельные диоды D1 и D2 подключаются к переключательным элементам Q1 и Q2 соответственно.
[0038] Катушка L1 индуктивности устанавливается между узлом, где переключательные элементы Q1 и Q2 соединяются друг с другом, и линией 6 электропитания и подсоединяется к данному узлу и к линии 6 электропитания. Сглаживающий конденсатор С0 устанавливается между линией 7 электропитания и кабелем 5 заземления и подсоединяется к линии 7 электропитания и кабелю 5 заземления.
[0039] Инвертор 14 включает плечо 15 U-фазы, плечо 16 V-фазы и плечо 17 W-фазы, которые подключаются параллельно между линией 7 электропитания и кабелем 5 заземления. Каждое из плеч - плечо 15 U-фазы, плечо 16 V-фазы и плечо 17 W-фазы - образовано переключательными элементами, которые установлены между линией 7 электропитания и кабелем 5 заземления и последовательно соединены друг с другом. Например, плечо 15 U-фазы образовано переключательными элементами Q3 и Q4, плечо 16 V-фазы образовано переключательными элементами Q5 и Q6 и плечо 17 W-фазы образовано переключательными элементами Q7 и Q8. Встречно-параллельные диоды D3 - D8 подключаются к переключательным элементам Q3-Q8 соответственно. Переключательные элементы Q3-Q8 активируются/деактивируются в ответ на сигналы S3-S8 переключения соответственно из блока 30 управления.
[0040] Средние точки плеча 15 U-фазы, плеча 16 V-фазы и плеча 17 W-фазы подключаются к концам обмотки U-фазы, обмотки V-фазы и обмотки W-фазы электродвигателя M1 переменного тока соответственно. Как правило, электродвигатель M1 переменного тока является трехфазным электродвигателем с постоянными магнитами. В электродвигателе M1 переменного тока одни концы обмотки U-фазы, обмотки V-фазы и обмотки W-фазы соединяются друг с другом в нейтральной точке. Вторые концы обмотки U-фазы, обмотки V-фазы и обмотки W-фазы подключаются к средним точками плеча 15 U-фазы, плеча 16 V-фазы и плеча 17 W-фазы соответственно.
[0041] Во время работы в режиме повышения повышающий/понижающий преобразователь 12 повышает напряжение Vb постоянного тока, поступающее из источника В питания постоянного тока, и подает повышенное напряжение постоянного тока (далее напряжение постоянного тока, которое соответствует напряжению на входе в инвертор 14, иногда будет называться "системным напряжением") в инвертор 14. Более конкретно, период, в течение которого активирован переключательный элемент Q1, и период, в течение которого активирован переключательный элемент Q2, устанавливаются попеременно в ответ на сигналы S1 и S2 управления переключением из блока 30 управления. Коэффициент повышения напряжения соответствует отношению периодов, в течение которых переключательные элементы Q1 и Q2 активированы, к полному периоду.
[0042] Во время работы в режиме понижения повышающий/понижающий преобразователь 12 понижает напряжение постоянного тока (системное напряжение), поступающее из инвертора 14 через сглаживающий конденсатор С0, и подает пониженное напряжение постоянного тока в источник В питания постоянного тока. Более конкретно, период, в течение которого активирован только переключательный элемент Q1, и период, в течение которого переключательные элементы Q1 и Q2 деактивированы, устанавливаются попеременно в ответ на сигналы S1 и S2 переключения из блока 30 управления. Коэффициент понижения напряжения соответствует отношению периода, в течение которого активирован переключательный элемент Q1, к полному периоду.
[0043] Сглаживающий конденсатор С0 сглаживает напряжение постоянного тока из повышающего/понижающего преобразователя 12 и подает сглаженное напряжение постоянного тока в инвертор 14. Датчик 13 напряжения измеряет напряжение между концами сглаживающего конденсатора СО, т.е. системное напряжение, и выдает в блок 30 управления сигнал, индицирующий измеренное значение VH.
[0044] В случае, когда заданное значение вращающего момента для электродвигателя Ml переменного тока является положительным (Trqcom >0) при подаче напряжения постоянного тока из сглаживающего конденсатора С0 в инвертор 14, инвертор 14 преобразует это напряжение постоянного тока в напряжение переменного тока путем активации/деактивации переключательных элементов Q3-Q8 в ответ на соответствующие сигналы S3-S8 управления переключением из блока 30 управления и питает электродвигатель M1 переменного тока таким образом, что электродвигатель M1 переменного тока выдает положительный вращающий момент. Альтернативно, в случае, когда заданное значение вращающего момента для электродвигателя M1 переменного тока является нулевым (Trqcom=0), инвертор 14 преобразует это напряжение постоянного тока в напряжение переменного тока путем активации/деактивации переключательных элементов Q3-Q8 в ответ на соответствующие сигналы S3-S8 управления переключением и питает электродвигатель M1 переменного тока таким образом, что выходной вращающий момент электродвигателя M1 переменного тока равняется нулю. То есть, электродвигатель M1 переменного тока запускается для получения равного нулю или положительного вращающего момента, который определяется заданным значением Trqcom вращающего момента.
[0045] Когда в гибридном транспортном средстве или в электромобиле, содержащем систему 100 привода от электродвигателя, выполняется операция регенеративного торможения, заданное значение Trqcom вращающего момента для электродвигателя M1 переменного тока устанавливается на отрицательное значение (Trqcom<0). В этом случае инвертор 14 преобразует напряжение переменного тока, генерируемое электродвигателем M1 переменного тока, в напряжение постоянного тока путем активации/деактивации переключательных элементов Q3-Q8 в ответ на соответствующие сигналы S3-S8 управления переключением и подает напряжение постоянного тока (системное напряжение) в повышающий/понижающий преобразователь 12 через сглаживающий конденсатор С0. Примером операции регенеративного торможения в этом случае является операция торможения в сочетании с регенеративным генерированием электроэнергии, которая выполняется, когда водитель, управляющий гибридным транспортным средством или электромобилем, нажимает педаль тормоза, и торможение автомобиля (или отмена ускорения) в сочетании с регенеративным генерированием электроэнергии при отпускании педали газа (вместо нажатия педали тормоза) во время движения автомобиля.
[0046] Датчики 24 тока измеряют токи, протекающие в электродвигателе M1 переменного тока, и выдают сигналы, индицирующие измеренные токи электродвигателя, в блок 30 управления. Сумма мгновенных значений трехфазных токов iu, iv и iw равняется 0. Соответственно, достаточно использовать два датчика 24 тока для измерения токов электродвигателя, протекающих в двух фазах электродвигателя M1 переменного тока (например, тока iv в фазе V и тока iw в фазе W).
[0047] Датчик 25 угла поворота (синус-косинусный вращающийся трансформатор) измеряет угол θ поворота ротора электродвигателя M1 переменного тока и передает сигнал, индицирующий угол θ поворота, в блок 30 управления. Блок 30 управления на основании угла θ поворота вычисляет скорость вращения электродвигателя M1 переменного тока.
[0048] Блок 30 управления управляет работой повышающего/понижающего преобразователя 12 и инвертора 14 на основании заданного значения Trqcom вращающего момента, индицируемого сигналом, получаемым из внешнего электронного блока управления (ЭБУ верхнего уровня, не показан), напряжения Vb аккумуляторной батареи, измеряемого датчиком 10 напряжения, системного напряжения VH, измеряемого датчиком 13 напряжения, токов iv электродвигателя, индицируемых посредством сигналов из датчиков 24 тока, и угла θ поворота, индицируемого посредством сигналов из датчика 25 скорости вращения, таким образом, что электродвигатель M1 переменного тока вырабатывает вращающий момент, соответствующий заданному значению Trqcom вращающего момента, в соответствии с описанным далее способом. То есть, блок 30 управления вырабатывает сигналы S1 и S2 управления переключением для регулирования повышающего/понижающего преобразователя 12 вышеописанным образом и сигналы S3-S8 управления переключением для регулирования инвертора 14 вышеописанным образом, и выводит сигналы S1 и S2 в повышающий/понижающий преобразователь 12, а сигналы S3-S8 в инвертор 14.
[0049] Во время выполнения повышающим/понижающим преобразователем 12 операции повышения блок 30 управления регулирует выходное напряжение VH из сглаживающего конденсатора С0 по принципу обратной связи и вырабатывает сигналы S1 и S2 управления переключением, на основании которых выходное напряжение VH согласуется с заданным значением напряжения.
[0050] При получении из внешнего электронного блока управления (ЭБУ) сигнала RGE, который указывает, что гибридное транспортное средство или электромобиль переводится в режим регенеративного торможения, блок 30 управления вырабатывает сигналы S3-S8 управления переключением, исходя из которых напряжение переменного тока, генерируемое электродвигателем M1 переменного тока, преобразуется в напряжение постоянного тока, и выводит эти сигналы S3-S8 управления переключением в инвертор 14. Затем инвертор 14 преобразует напряжение переменного тока, генерируемое электродвигателем M1 переменного тока, в напряжение постоянного тока и подает это напряжение постоянного тока в повышающий/понижающий преобразователь 12.
[0051] При получении из внешнего электронного блока управления (ЭБУ) сигнала RGE, который указывает, что гибридное транспортное средство или электромобиль переводится в режим регенеративного торможения, блок 30 управления вырабатывает сигналы S1 и S2 управления переключением, исходя из которых поступающее из инвертора 14 напряжение постоянного тока понижается, и выводит эти сигналы S1 и S2 управления переключением в повышающий/понижающий преобразователь 12. Затем напряжение переменного тока, генерируемое электродвигателем M1 переменного тока, преобразуется в напряжение постоянного тока, понижается и затем подается в источник В питания постоянного тока.
[0052] Кроме того, блок 30 управления вырабатывает сигнал SE для активации/деактивации системных реле SRI и SR2 и выводит этот сигнал SE в системные реле SRI и SR2.
[0053] Далее будет подробно описано преобразование электроэнергии, выполняемое в инверторе 14 и управляемое блоком 30 управления.
[0054] Как показано на фиг.2, в системе 100 привода от электродвигателя согласно данному примеру осуществления настоящего изобретения режим регулирования преобразования напряжения, выполняемого в инверторе 14, переключается между тремя режимами регулирования, каковыми являются режим синусоидального ШИМ-регулирования, режим ШИМ-регулирования с перемодуляцией и режим регулирования прямоугольно-импульсного напряжения.
[0055] Режим синусоидального ШИМ-регулирования используется как обычный режим ШИМ-регулирования. В режиме синусоидального ШИМ-регулирования активация/деактивация переключательных элементов в каждом плече фаз U, V и W регулируется на основании сравнения заданного значения синусоидального напряжения и несущей волны (как правило, треугольных импульсов). В результате коэффициент заполнения регулируется таким образом, что основная гармоника проинтегрированного колебания, получаемая путем интегрирования колебаний в период высокого уровня сигнала, который соответствует периоду, в течение которого активирован верхний элемент плеча, и колебаний в период низкого уровня сигнала, который соответствует периоду, в течение которого активирован нижний элемент плеча, становится синусоидальной на заданный период. Общеизвестно, что при ШИМ-регулировании синусоидальных колебаний амплитуда основной гармоники возрастает только до 0,61 от напряжения на входе инвертора в период высокого уровня сигнала.
[0056] С другой стороны, при регулировании прямоугольно-импульсного напряжения на электродвигатель M1 переменного тока в заданный период подается один импульс прямоугольных колебаний, для которых отношение между периодами высокого и низкого уровня сигнала равняется 1:1, что соответствует отношению, когда коэффициент заполнения ШИМ поддерживается максимальным. То есть частота модуляции возрастает до 0,78.
[0057] При ШИМ-регулировании с перемодуляцией основная гармоника искажается для уменьшения амплитуды несущей волны, и поэтому выполняется ШИМ-регулирование, аналогичное синусоидальному ШИМ-регулированию. Частота модуляции возрастает до значения в диапазоне от 0,61 до 0,78 за счет искажения основной гармоники. В данном примере осуществления настоящего изобретения и режим ШИМ-регулирования синусоидальных колебаний, который является нормальным режимом ШИМ-регулирования, и режим ШИМ-регулирования с перемодуляцией классифицируются как режим ШИМ-регулирования.
[0058] В электродвигателе M1 переменного тока индуцируемое напряжение возрастает с увеличением скорости вращения и выходного вращающего момента, вследствие чего повышается также требуемое напряжение. Повышенное напряжение достигается посредством преобразователя 12, то есть системное напряжение VH должно быть больше, чем напряжение, требуемое для электродвигателя (далее называемое "напряжение, требуемое для электродвигателя") (индуцируемое напряжение). При этом существует предельное значение (максимальное напряжение VH) повышенного напряжения, достигаемого с помощью преобразователя 12, а именно системное напряжение.
[0059] Соответственно, в диапазоне, где напряжение, требуемое для электродвигателя (индуцированное напряжение), меньше максимального значения (максимального напряжения VH) системного напряжения, используется режим ШИМ-регулирования, т.е. режим синусоидального ШИМ-регулирования или режим ШИМ-регулирования с перемодуляцией, и выходной вращающий момент регулируется на заданное значение Trqcom вращающего момента посредством регулирования тока электродвигателя, осуществляемого путем выполнения векторного регулирования.
[0060] Когда напряжение, требуемое для электродвигателя (индуцированное напряжение), достигает максимального значения (максимальное напряжение VH) системного напряжения, поддерживается системное напряжение VH и используется режим регулирования прямоугольно-импульсного напряжения, т.е. режим регулирования слабого поля. При регулировании прямоугольно-импульсного напряжения амплитуда основной гармоники фиксируется. Соответственно, вращающий момент регулируется посредством регулирования фазы напряжения прямоугольного импульса на основании отклонения фактического вращающего момента от заданного значения вращающего момента, получаемого путем вычисления электрической мощности.
[0061] Как показано на блок-схеме фиг.3, электронный блок управления ЭБУ верхнего уровня (не показан) вычисляет заданное значение Trqcom вращающего момента для электродвигателя Ml переменного тока на основании выходной мощности, требуемой транспортным средством в соответствии с величиной срабатывания педали газа, и т.п. (шаг S100). Затем, блок 30 управления вычисляет напряжение, требуемое для электродвигателя (индуцированное напряжение), на основании заданного значения Trqcom вращающего момента электродвигателя M1 переменного тока и скорости вращения для электродвигателя M1 переменного тока, используя заданную схему и т.п.(шаг S110). Затем блок 30 управления определяет на основании соотношения между напряжением, требуемым для электродвигателя, и максимальным значением системного напряжения (максимальным напряжением VH), будет ли для управления электродвигателем использоваться режим регулирования прямоугольно-импульсного напряжения или режим ШИМ-регулирования (режим синусоидального ШИМ-регулирования или режим ШИМ-регулирования с перемодуляцией) (шаг S120). Когда определяется, что используется режим ШИМ-регулирования, на основании диапазона частоты модуляции заданного значения напряжения в соответствии с векторным регулированием определяется, будет использоваться режим синусоидального ШИМ-регулирования или режим ШИМ-регулирования с перемодуляцией. Согласно блок-схеме соответствующий режим регулирования выбирается из множества режимов регулирования, показанных на фиг.2, на основании рабочего состояния электродвигателя M1 переменного тока.
[0062] В результате, как показано на фиг.4, режим синусоидального ШИМ-регулирования используется в диапазоне А1 малых скоростей вращения с целью уменьшения флуктуации вращающего момента. Режим ШИМ-регулирования с перемодуляцией используется в диапазоне А2 средних скоростей вращения. Режим регулирования прямоугольно-импульсного напряжения используется в диапазоне A3 высоких скоростей вращения. В частности, выходная мощность электродвигателя M1 переменного тока увеличивается за счет использования режима ШИМ-регулирования с перемодуляцией и режима регулирования прямоугольно-импульсного напряжения. Как описано выше, то, какой режим регулирования выбирается из множества режимов регулирования фиг.2, определяется на основании диапазона достижимой частоты модуляции.
[0063] На фиг.5 показана блок-схема регулирования, когда блоком 30 управления выполняется ШИМ-регулирование. Как показано на фиг.5, блок 200 ШИМ-регулирования включает часть 210 для подготовки команды тока, части 220 и 250 для преобразования координат, часть 230 для вычисления скорости вращения, часть 240 для вычисления PI, часть 260 для подготовки сигнала ШИМ и часть 270 для определения режима регулирования.
[0064] Часть 210 для подготовки команды тока вырабатывает значение Idcom команды тока по оси d и значение Iqcom команды тока по оси q, соответствующие заданному значению Trqcom вращающего момента, с использованием, например, заранее разработанной таблицы.
[0065] Часть 220 для преобразования координат вычисляет ток Id по оси d и ток Iq по оси q на основании тока iv в фазе V и тока iw в фазе W, измеряемых датчиками 24 посредством выполнения преобразования координат (трехфазных в двухфазные) с использованием угла θ поворота электродвигателя M1 переменного тока, измеряемого датчиком 25 угла поворота. Часть 230 для вычисления скорости вращения вычисляет скорость вращения Nmt (или угловую скорость вращения ω) электродвигателя M1 переменного тока на основании выходного сигнала датчика 25 угла поворота.
[0066] Часть 240 для вычисления PI получает сигналы, индицирующие отклонение Δid тока Id по оси d от заданного значения Idcom (Δid=Idcom-Id) и отклонение Δiq тока Iq по оси q от заданного значения Idcom (Δlq=Iqcom-Iq). Часть 240 для вычисления PI получает регулирующее отклонение посредством выполнения вычисления PI, используя заданный коэффициент усиления, по отклонению тока Δid по оси d и отклонению тока Δiq по оси q. Затем часть 240 для вычисления PI вырабатывает заданное значение Vd# напряжения по оси d и заданное значение Vq# напряжения по оси q, соответствующие регулирующему напряжению.
[0067] Часть 250 для преобразования координат преобразует значение Vd# команды напряжения по оси d и значение Vq# команды напряжения по оси q в значения Vu, Vv, Vw команд напряжения для соответствующих фаз U, V и W путем выполнения преобразования координат (двухфазных в трехфазные), используя угол θ поворота электродвигателя Ml переменного тока. На преобразование значения Vd# команды напряжения по оси d и значения Vq# команды напряжения по оси q в значения команд напряжения Vu, Vv, Vw для соответствующих фаз U, V и W влияет системное напряжение VH.
[0068] Если в соответствии с блок-схемой фиг.3 выбирается режим ШИМ-регулирования (режим синусоидального ШИМ-регулирования или режим ШИМ-регулирования с перемодуляцией), то часть 270 для определения режима регулирования выбирает или режим синусоидального ШИМ-регулирования, или режим ШИМ-регулирования с перемодуляцией посредством вычисления частоты модуляции так же, как было описано ранее.
[0069] Часть 270 для определения режима регулирования вычисляет амплитуду Vamp линейного напряжения в соответствии с приведенными ниже уравнениями (1), (2), используя значение Vd# команды напряжения по оси d и значение Vq# команды напряжения по оси q, полученные частью 240 для вычисления PI.
[0070]


Затем часть 270 для определения режима регулирования вычисляет частоту Kmd модуляции, которая представляет собой отношение амплитуды Vamp линейного напряжения, полученной в соответствии с вышеупомянутым уравнением, к системному напряжению VH.
[0071]

Часть 270 для определения режима регулирования выбирает или режим синусоидального ШИМ-регулирования или режим ШИМ-регулирования с перемодуляцией на основании частоты Kmd модуляции, полученной в соответствии с вышеупомянутым уравнением. Как описано выше, режим регулирования, выбранный частью 270 для определения режима регулирования, влияет на переключение несущей волны, выполняемое в части 260 для подготовки сигнала ШИМ. А именно, когда выбирается режим ШИМ-регулирования с перемодуляцией, происходит переключение с обычной несущей волны, используемой в режиме синусоидального ШИМ-регулирования, на несущую волну, используемую для широтно-импульсной модуляции, выполняемой в части 260 для подготовки сигнала ШИМ.
[0072] Когда частота Kmd модуляции, получаемая посредством уравнения (3), превышает верхний предел частоты модуляции, который может быть достигнут в режиме ШИМ-регулирования, часть 270 для определения режима регулирования может передать в электронный блок управления (ЭБУ) верхнего уровня (не показан) сигнал на активацию изменения режима регулирования на режим регулирования прямоугольно-импульсного напряжения.
[0073] Часть 260 для подготовки сигнала ШИМ вырабатывает сигналы S3-S8 управления переключением, показанные на фиг.1, на основании сравнения каждого значения Vu, Vv, Vw команды напряжения для соответствующих фаз U, V и W с заданной несущей волной. Когда инвертор 14 регулируется в соответствии с сигналами S3-S8 переключения, выработанными блоком 200 ШИМ-регулирования, подается такое напряжение переменного тока, что электродвигатель M1 переменного тока выдает вращающий момент, соответствующий заданному значению Trqcom вращающего момента, введенному в часть 210 для подготовки команды тока.
[0074] Таким образом, формируется замкнутый контур, по которому ток электродвигателя регулируется до заданного значения (Idcom, Iqcom) тока, соответствующего заданному значению Trqcom вращающего момента. В результате выходной вращающий момент электродвигателя M1 переменного тока регулируется на основании заданного значения Trqcom вращающего момента.
[0075] Далее будет рассмотрена со ссылками на фиг.6 блок-схема регулирования в режиме регулирования прямоугольно-импульсного напряжения. Как показано на фиг.6, блок 400 регулирования прямоугольно-импульсного напряжения включает часть 220 для преобразования координат, которая является такой же, какая используется в режиме ШИМ-регулирования, часть 420 для оценки вращающего момента, часть 430 для вычисления PI, часть 440 для прямоугольно-импульсного генерирования и часть 450 для подготовки сигнала.
[0076] Часть 220 для преобразования координат выполняет преобразование координат таким образом, что ток в фазе U, ток в фазе V и ток в фазе W, полученные исходя из тока iv в фазе V и тока iw в фазе W, измеренных датчиками 24 тока, преобразуются в ток Id по оси d и ток Iq по оси q, как в случае режима ШИМ-регулирования.
[0077] Часть 420 для оценки вращающего момента оценивает выходной вращающий момент электродвигателя Ml переменного тока, используя ток Id по оси d и ток Iq по оси q, полученные частью 220 для преобразования координат.
[0078] Часть 420 для оценки вращающего момента образована в виде схемы 422 вычисления вращающего момента, которая выдает оцененное значение Trq вращающего момента, используя в качестве параметров ток Id по оси d и ток Iq по оси q, как показано, например, на фиг.7.
[0079] Вместо использования схемы оцененное значение Trq вращающего момента может быть вычислено частью 420 для оценки вращающего момента в соответствии с приведенным ниже уравнением (4), которое является характеристическим уравнением электродвигателя Ml переменного тока.
[0080] 
В уравнении (4) "Kt" - постоянная (Nm/a) вращающего момента, "р" - логарифм числа полюсов, "Ld" - индуктивность (Н) по оси d и "Lq" - индуктивность (Н) по оси q. "Kt", "Ld" и "Lq" определяются однозначным образом как постоянные схемы (постоянные электродвигателя), исходя из конфигурации электродвигателя M1 переменного тока.
[0081] Известно, что индуктивность Ld по оси d и индуктивность Lq по оси q, которые являются постоянными электродвигателя в уравнении (4), уменьшаются при увеличении тока Id по оси d и тока Iq по оси q соответственно, как показано на фиг.8. Поэтому часть 420 для оценки вращающего момента может быть сконфигурирована, как показано на фиг.9.
[0082] Как показано на фиг.9, часть 420 для оценки вращающего момента включает часть 424 для коррекции постоянных электродвигателя и часть 426 для вычисления вращающего момента.
[0083] Часть 424 для коррекции постоянных электродвигателя, как правило, образована схемой, которая выдает индуктивность Ld по оси d и индуктивность Lq по оси q, используя в качестве параметров ток Id по оси d и ток Iq по оси q. Схема составляется таким образом, чтобы она отражала характеристики, показанные на фиг.8. Часть 426 для вычисления вращающего момента вычисляет оцененное значение Trq вращающего момента в соответствии с уравнением (5), используя индуктивность Ld# по оси d и индуктивность Lq# по оси q, которые являются постоянными электродвигателя, скорректированными частью 424 для коррекции постоянных электродвигателя.
[0084]

Постоянная электродвигателя корректируется на основании токов Id и Iq электродвигателя и вращающий момент оценивается с использованием скорректированных постоянных электродвигателя. В результате повышается точность оценки вращающего момента и, следовательно, выходной вращающий момент регулируется более точно.
[0085] Согласно фиг.6 часть 430 для вычисления PI получает сигнал, индицирующий отклонение ΔTrq (ΔTrq=Trqcom-Trq) оцененного значения Trq вращающего момента от заданного значения Trqcom вращающего момента. Часть 430 для вычисления PI получает регулирующее отклонение путем выполнения вычисления PI по отклонению ΔTrq вращающего момента, используя заданный коэффициент усиления, и устанавливает фазу Δv прямоугольно-импульсного напряжения на основании полученного регулирующего отклонения. Более конкретно, когда заданное значение Trqcom вращающего момента является положительным (Trqcom >0), то, если вращающий момент недостаточен, фаза напряжения сдвигается вперед. И наоборот, если вращающий момент избыточен, то фаза напряжения сдвигается назад. Когда заданное значение Trqcom вращающего момента является отрицательным (Trqcom <0), то, если вращающий момент недостаточен, фаза напряжения сдвигается назад. И наоборот, если вращающий момент избыточен, то фаза напряжения сдвигается вперед.
[0086] Часть 440 для генерирования прямоугольной волны вырабатывает заданные значения Vu, Vv и Vw фазных напряжений (прямоугольных импульсов) на основании фазного напряжения φv, установленного частью 430 для вычисления PI. Часть 450 для подготовки сигнала вырабатывает сигналы S3-S8 управления переключением на основании значений Vu, Vv и Vw команд фазного напряжения. Когда инвертор 14 выполняет операции переключения на основании сигналов S3-S8 управления переключением, прямоугольный импульс, генерируемый на основании фазного напряжения φv, подается на электродвигатель в качестве каждого фазного напряжения.
[0087] В блоке 400 регулирования прямоугольно-импульсного напряжения, показанном на фиг.6, оцененное значение Trq вращающего момента, используемое при регулировании обратной связи по вращающему моменту, вычисляется на основании только выходных сигналов датчиков 24 тока и датчика 25 положения, как и в случае ШИМ-регулирования, показанном на фиг.5. Соответственно, даже тогда, когда режим регулирования переключается между режимом ШИМ-регулирования и режимом регулирования прямоугольно-импульсного напряжения, количественное состояние (количественные значения, измеряемые датчиками) электродвигателя переменного тока, используемое при регулирования электродвигателя, не изменяется.
[0088] На фиг.10 показан блок 400# регулирования прямоугольно-импульсного напряжения, который используется в качестве примера для сравнения с блоком 400 регулирования прямоугольно-импульсного напряжения согласно данному примеру осуществления настоящего изобретения. Блок 400# регулирования прямоугольно-импульсного напряжения включает часть 460 для вычисления электрической мощности и часть 470 для оценки вращающего момента вместо части 220 для преобразования координат и части 420 для оценки вращающего момента, входящих в блок 400 регулирования прямоугольно-импульсного напряжения (фиг.6). То есть оба блока 400 и 400# регулирования прямоугольно-импульсного напряжения регулируют вращающий момент электродвигателя Ml переменного тока посредством обратной связи. Однако блоки 400 и 400# регулирования прямоугольно-импульсного напряжения отличаются друг от друга способом оценки выходного вращающего момента.
[0089] Часть 460 для вычисления электрической мощности вычисляет потребляемую электродвигателем электрическую мощность Pmt в соответствии с приведенным ниже уравнением (6), используя фазные токи, полученные на основании тока iv в фазе V и тока iw в фазе W, измеренных датчиками 24 тока, и фазные напряжения Vu, Vv, Vw соответствующих фаз U, V и W, основанные на значении, измеренном датчиком 13 напряжения.
[0090]

Часть 470 для оценки вращающего момента вычисляет оцененное значение Trq вращающего момента в соответствии с уравнением (7), используя угловую скорость ω, вычисленную на основании потребляемой электродвигателем электрической мощности Pmt, полученную частью 460 для вычисления электрической мощности, и угол θ поворота электродвигателя M1 переменного тока, измеренный датчиком 25 угла поворота.
[0091] 
Конфигурация регулирования посредством обратной связи по крутящему моменту после того, как вычислено оцененное значение Trq вращающего момента, является такой же, как в блоке 400 регулирования прямоугольных колебаний фиг.6. Соответственно, подробное описание конфигурации регулирования посредством обратной связи по крутящему моменту после того, как вычислено оцененное значение Trq вращающего момента, приводиться не будет.
[0092] Как показано на фиг.10, в блоке 400# регулирования прямоугольно-импульсного напряжения в соответствии со сравнительным примером в дополнение к выходным сигналам датчиков 24 тока и датчика 25 положения требуется выходной сигнал датчика 13 напряжения. Соответственно, когда режим регулирования переключается между режимом ШИМ-регулирования и режимом регулирования прямоугольно-импульсного напряжения, количественное состояние (количественные значения, измеряемые датчиками) электродвигателя M1 переменного тока, используемое для регулирования электродвигателя, изменяется.
[0093] На графике фиг.11 показаны различия между характером изменения выходного вращающего момента, когда регулирование переключается между блоком 400 регулирования прямоугольно-импульсного напряжения (фиг.6) и блоком 400# регулирования прямоугольно-импульсного напряжения (фиг.8).
[0094] Как показано на фиг.11, по мере увеличения заданного значения 500 вращающего момента режимы регулирования электродвигателя M1 переменного тока для получения высокой выходной мощности постепенно изменяются с синусоидального ШИМ-регулирования на режим ШИМ-регулирования с перемодуляцией, а затем с режима ШИМ-регулирования с перемодуляцией на режим регулирования прямоугольно-импульсного напряжения.
[0095] В частности, когда режим регулирования переключается между режимом ШИМ-регулирования с перемодуляцией и режимом регулирования прямоугольно-импульсного напряжения, происходит переключение с блока 200 ШИМ-регулирования (фиг.5) на блок 400 регулирования прямоугольно-импульсного напряжения (фиг.6) или на блок 400# регулирования прямоугольно-импульсного напряжения (фиг.10).
[0096] При регулировании вращающего момента с использованием блока 400# регулирования прямоугольно-импульсного напряжения (фиг.10), показанном в качестве сравнительного примера, для регулирования выходного вращающего момента в дополнение к значениям, измеряемым датчиками 24 тока и датчиком 25 положения, используется значение, измеряемое датчиком 13 напряжения. Поэтому выходной вращающий момент может ступенчато флуктуировать, как это показано позицией 510, из-за ошибки оцененного значения Trq вращающего момента, получаемого частью 420 для оценки вращающего момента, которая вызывается, например, ошибкой измерений датчика 13 напряжения.
[0097] В отличие от этого, при регулирование выходного вращающего момента с использованием блока 400 регулирования прямоугольно-импульсного напряжения (фиг.6) в соответствии с данным примером осуществления настоящего изобретения, даже в случае переключения режима регулирования количественное состояние (количественные значения, измеряемые датчиками) электродвигателя, используемое при регулировании обратной связи, не меняется. Соответственно, как это показано позицией 520, можно предотвратить ступенчатые флуктуации выходного вращающего момента, которые с большой вероятностью возникают при переключении режима регулирования. Таким образом, можно избежать снижения эффективности регулирования выходного вращающего момента, которое с большой вероятностью возникает при переключении режима регулирования между режимом ШИМ-регулирования и режимом регулирования прямоугольно-импульсного напряжения. Более конкретно, можно предотвратить ступенчатые флуктуации вращающего момента, обусловленные ошибкой оцененного значения вращающего момента, которая вызывается, например, ошибкой измерений датчика 13 напряжения.
[0098] В конфигурации, показанной в данном примере осуществления, датчики 24 тока и датчик 25 угла поворота соответствуют "датчику тока" и "датчику положения" в настоящем изобретении соответственно. Шаг S120 на фиг.3 соответствует "средству выбора режима регулирования" в настоящем изобретении. Блок 200 ШИМ-регулирования (фиг.5) соответствует "второму средству регулирования электродвигателя" в настоящем изобретении, и блок 400 регулирования прямоугольно-импульсного напряжения (фиг.6) соответствует "первому средству регулирования электродвигателя" в настоящем изобретении. Часть 420 для оценки вращающего момента, часть 430 для вычисления PI и часть 440 для генерирования прямоугольной волны / часть 450 для подготовки сигнала на фиг.6 соответствуют "первому средству оценки вращающего момента", "средству регулирования фазы напряжения" и "первому средству регулирования напряжения" в настоящем изобретении соответственно. Часть 424 для коррекции постоянных электродвигателя фиг.9 соответствует "средству коррекции постоянной" в настоящем изобретении.
[0099] Далее будет описан модифицированный пример осуществления настоящего изобретения. На фиг.12 показан блок регулирования для режима ШИМ-регулирования в соответствии с модифицированным примером осуществления настоящего изобретения.
[0100] Как показано на фиг.12, в системе привода от электродвигателя в соответствии с модифицированным примером осуществления настоящего изобретения, в режиме ШИМ-регулирования в систему регулирования обратной связи по току электродвигателя, показанную на фиг.6, добавляется контур регулирования обратной связи по вращающему моменту посредством дополнительного введения части 420' для оценки вращающего момента и части 320 для модификации заданного значения вращающего момента.
[0101] Часть 420' для оценки вращающего момента вычисляет оцененное значение Trq вращающего момента на основании тока Id по оси d и тока Iq по оси q, как в случае режима регулирования прямоугольно-импульсного напряжения. Часть 320 для модификации заданного значения вращающего момента включает дополнительные точки 322, 324 и часть 325 для вычисления PI. В дополнительной точке 322 получается отклонение ΔTrq (ΔTrq=Trqcom-Trq) оцененного значения Trq вращающего момента, полученного частью 420' для оценки вращающего момента, от заданного значения Trqcom вращающего момента для электродвигателя M1 переменного тока. Часть 325 для вычисления PI вырабатывает регулирующее отклонение путем вычисления PI по отклонению ΔTrq вращающего момента с использованием заданного коэффициента усиления. Регулирующее отклонение, вырабатываемое частью 325 для вычисления PI, используется в качестве величины ΔTrqc модификации вращающего момента, и величина ΔTrqc модификации вращающего момента вычитается из заданного значения Trqcom вращающего момента в дополнительной точке 324, вследствие чего получается заданное значение Trqcom# вращающего момента, модифицированное посредством регулирования обратной связи по вращающему моменту.
[0102] После вычисления заданного значения Trqcom# вращающего момента выходной вращающий момент электродвигателя M1 переменного тока регулируется на основании заданного значения Trqcom# вращающего момента посредством регулирования обратной связи, т.е. так же, как выполняется регулирование тока электродвигателя на основании заданного значения Trqcom вращающего момента, показанное на фиг.6.
[0103] В такой конфигурации в режиме регулирования прямоугольно-импульсного напряжения отклонение оцененного значения Trq вращающего момента от заданного значения Trqcom вращающего момента влияет на команду значения Idcom тока по оси d и на команду значения Iqcom тока по оси q, выработанные частью 210 для подготовки команды тока. Соответственно, контур обратной связи по вращающему моменту и в режиме ШИМ-регулирования, и в режиме регулирования прямоугольно-импульсного напряжения формируется на основании одной и той же оценки вращающего момента. Следовательно, возможно более эффективно предотвращать флуктуации вращающего момента, которые с большой вероятностью возникают при переключении режима регулирования.
[0104] Когда электродвигатель M1 переменного тока представляет собой электродвигатель с постоянным магнитом, если температура магнита возрастает из-за тепла, выделяемого за счет потребляемой электродвигателем электрической мощности, то выходной вращающий момент может понижаться вследствие эффекта размагничивания. Соответственно, путем выполнения регулирования обратной связи по току электродвигателя, к которому добавлен контур обратной связи по вращающему моменту, изменение характеристик электродвигателя из-за изменения температуры магнита компенсируется без измерения температуры магнита и воздействия на регулирование обратной связи. В результате выходной вращающий момент регулируется более надежно.
[0105] Часть 420' для оценки вращающего момента, часть 320 для модификации заданного значения вращающего момента и часть 210 для подготовки команды тока на фиг.12 соответствуют "второму средству оценки вращающего момента" "средству изменения заданного значения вращающего момента", и "средству выработки команды тока" в настоящем изобретении соответственно. Часть 240 для вычисления PI, часть 250 для преобразования координат и часть 260 для подготовки сигнала ШИМ соответствуют "второму средству регулирования напряжения" в настоящем изобретении.
[0106] В данном примере осуществления настоящего изобретения рассматривается описание системы привода от электродвигателя, которая обеспечивает питание и регулирование электродвигателя, установленного в гибридном транспортном средстве или электромобиле в качестве приводного электродвигателя. Однако применение настоящего изобретения этим не ограничивается. А именно, изобретение может быть применено для выполнения регулирования выходного вращающего момента в системе привода от электродвигателя, имеющей такую конфигурацию регулирования, в которой режим регулирования переключается между режимом ШИМ-регулирования и режимом регулирования прямоугольно-импульсного напряжения вне зависимости от типа регулируемого электродвигателя и устанавливаемых устройств и систем.
[0107] Несмотря на то, что изобретение было рассмотрено со ссылками на предпочтительный пример его осуществления, должно быть очевидным, что данное изобретение не ограничивается примерами его реализации или конструкции. Наоборот, изобретение рассчитано на охват различных модификаций и эквивалентных схем. Кроме того, хотя различные элементы предпочтительного примера осуществления показаны в различных сочетаниях и конфигурациях, которые являются примерными, другие сочетания и конфигурации, включающие больше элементов, меньше элементов или только один элемент, также соответствуют сути и объему настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2659372C1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2379821C1 |
| ВЕКТОРНЫЙ РЕГУЛЯТОР ДЛЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2006 |
|
RU2407140C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2447572C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ | 2014 |
|
RU2564991C1 |
| КОНТРОЛЛЕР ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2432663C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ВРАЩАЮЩИХСЯ ЭЛЕКТРИЧЕСКИХ МАШИН | 2015 |
|
RU2661239C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ | 2014 |
|
RU2556874C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ ДЛЯ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2463699C1 |









Изобретение относится к области электротехники и может быть использовано в системе привода, в котором режим регулирования переключается между режимом ШИМ-регулирования и режимом регулирования прямоугольно-импульсного напряжения вне зависимости от типа электродвигателя. Техническим результатом является уменьшение флуктуации вращающего момента при переключении режима регулирования. В устройстве и способе регулирования системы привода от электродвигателя в режиме регулирования прямоугольно-импульсного напряжения выполняется регулирование вращающего момента посредством выполнения регулирования обратной связи, при котором фаза (Δv) прямоугольно-импульсного напряжения корректируется на основании отклонения оцененного значения (Trq) вращающего момента от заданного значения (Trqcom) вращающего момента. Часть (420) для оценки вращающего момента вычисляет оцененное значение (Trq) вращающего момента, используя токи (Id, Iq) электродвигателя, вычисленные на основании значений, измеренных датчиками (24) тока и датчиком (25) положения, так же как в случае режима ШИМ-регулирования. А именно, при регулировании электродвигателя используется количественная оценка состояния (количественная оценка, определенная датчиками) электродвигателя (M1) переменного тока как в режиме регулирования прямоугольно-импульсного напряжения, так и в режиме ШИМ-регулирования. 4 н. и 9 з.п. ф-лы, 12 ил.
1. Устройство регулирования системы привода от электродвигателя, включающей инвертор, который запускает электродвигатель переменного тока, характеризующееся тем, что оно включает: датчик тока, который измеряет ток электродвигателя, протекающий в электродвигателе переменного тока; датчик положения, который измеряет угловое положение электродвигателя переменного тока; средство выбора режима регулирования для выбора режима регулирования для преобразования напряжения, выполняемого в инверторе, на основании рабочего состояния электродвигателя переменного тока; первое средство регулирования электродвигателя для выполнения, когда средство выбора режима регулирования выбирает первый режим регулирования, в котором на электродвигатель переменного тока подается прямоугольно-импульсное напряжение, регулирования вращающего момента посредством выполнения регулирования обратной связи, при котором фаза прямоугольно-импульсного напряжения корректируется на основании отклонения выходного вращающего момента электродвигателя переменного тока от заданного значения вращающего момента; и второе средство регулирования электродвигателя для выполнения, когда средство выбора режима регулирования выбирает второй режим регулирования, в котором напряжение, подаваемое на электродвигатель переменного тока, регулируется в режиме широтно-импульсной модуляции, регулирования вращающего момента посредством выполнения регулирования обратной связи по току электродвигателя на основании значения команды тока, соответствующего заданному значению вращающего момента, при этом первое средство регулирования электродвигателя включает: первое средство оценки вращающего момента для оценки выходного вращающего момента электродвигателя переменного тока на основании выходных сигналов датчика тока и датчика положения; средство регулирования фазы напряжения для определения фазы прямоугольно-импульсного напряжения на основании отклонения вращающего момента, оцененного первым средством оценки вращающего момента, от заданного значения вращающего момента; и первое средство регулирования напряжения для управления преобразованием напряжения, выполняемым в инверторе, так что в электродвигатель переменного тока подается прямоугольно-импульсное напряжение с фазой, определенной средством регулирования фазы напряжения, и второе средство регулирования электродвигателя выполняет регулирование обратной связи по току электродвигателя на основании выходных сигналов датчика тока и датчика положения.
2. Устройство регулирования по п.1, характеризующееся тем, что датчик тока предусмотрен для измерения токов, протекающих в соответствующих фазах электродвигателя переменного тока, а первое средство оценки вращающего момента оценивает выходной вращающий момент электродвигателя переменного тока на основании тока по оси d и тока по оси q в электродвигателе переменного тока, которые вычисляются на основании выходных сигналов датчика тока и датчика положения.
3. Устройство регулирования по п.2, характеризующееся тем, что первое средство оценки вращающего момента оценивает выходной вращающий момент электродвигателя переменного тока на основании тока по оси d и тока по оси q и постоянной электродвигателя переменного тока, а устройство регулирования дополнительно содержит средство коррекции постоянной для коррекции постоянной электродвигателя на основании тока по оси d и тока по оси q.
4. Устройство регулирования по п.1, характеризующееся тем, что второе средство регулирования электродвигателя включает: второе средство оценки вращающего момента для оценки выходного вращающего момента электродвигателя переменного тока на основании выходных сигналов датчика тока и датчика положения аналогично тому, как первое средство оценки вращающего момента оценивает выходной вращающий момент электродвигателя переменного тока; средство изменения заданного значения вращающего момента для модификации заданного значения вращающего момента на основании отклонения вращающего момента, оцененного вторым средством оценки вращающего момента, от заданного значения вращающего момента; средство выработки команды тока для получения значения команды тока на основании заданного значения вращающего момента, модифицированного средством изменения заданного значения вращающего момента; и второе средство регулирования напряжения для управления преобразованием напряжения, выполняемым в инверторе, так что напряжение, подаваемое на электродвигатель переменного тока, регулируется на основании отклонения тока электродвигателя, основанного на значении, измеряемом датчиком тока, от значения команды тока, выработанного средством выработки команды тока.
5. Устройство регулирования по п.1, характеризующееся тем, что второй режим регулирования включает режим синусоидальной широтно-импульсной модуляции, в котором частота модуляции лежит в диапазоне от 0 до 0,61, и режим широтно-импульсной модуляции с перемодуляцией, в котором основная гармоника искажается так, что частота модуляции лежит в диапазоне от 0,61 до 0,78.
6. Устройство регулирования системы привода от электродвигателя, включающей инвертор, который запускает электродвигатель переменного тока, характеризующееся тем, что оно содержит: средство выбора режима регулирования для выбора режима регулирования инвертора из множества режимов регулирования на основании рабочего состояния электродвигателя переменного тока; и средство регулирования множества режимов регулирования электродвигателя, которые предусматриваются таким образом, чтобы они соответствовали соответствующему множеству режимов регулирования, и которые регулируют выходной вращающий момент электродвигателя переменного тока в режиме регулирования, выбранного средством выбора режима регулирования, при этом для регулирования выходного вращающего момента электродвигателя переменного тока используется оцененный выходной вращающий момент, и оценка выходного вращающего момента выполняется способом, общим для множества режимов регулирования в средстве регулирования электродвигателя.
7. Устройство регулирования по п.6, характеризующееся тем, что электродвигатель переменного тока является электродвигателем с постоянным магнитом, в котором постоянный магнит закреплен на роторе.
8. Способ регулирования системы привода от электродвигателя, включающей инвертор, который запускает электродвигатель переменного тока, характеризующийся тем, что он содержит: шаг измерения тока электродвигателя, протекающего в электродвигателе переменного тока; шаг измерения углового положения электродвигателя переменного тока; шаг выбора режима регулирования для преобразования напряжения, выполняемого в инверторе, на основании рабочего состояния электродвигателя переменного тока; и шаг, при котором, когда выбирается первый режим регулирования, в котором на электродвигатель переменного тока подается прямоугольно-импульсное напряжение, выполняют регулирование вращающего момента посредством выполнения регулирования обратной связи, при котором фаза прямоугольно-импульсного напряжения корректируется на основании отклонения выходного вращающего момента электродвигателя переменного тока от заданного значения вращающего момента, при этом выходной вращающий момент электродвигателя переменного тока оценивается на основании выходных сигналов датчика тока и датчика положения; фаза прямоугольно-импульсного напряжения определяется на основании отклонения оцененного вращающего момента от заданного значения вращающего момента; и преобразование напряжения, выполняемое в инверторе, регулируется так, что на электродвигатель переменного тока подается прямоугольно-импульсное напряжение с определенной фазой; и шаг, при котором, когда выбирается второй режим регулирования, в котором напряжение, подаваемое на электродвигатель переменного тока, регулируется в режиме широтно-импульсной модуляции, выполняется регулирование вращающего момента посредством выполнения регулирования обратной связи по току электродвигателя на основании значения команды тока, соответствующего заданному значению вращающего момента, при этом регулирование обратной связи выполняется по току электродвигателя на основании измеренного тока электродвигателя и измеренного углового положения.
9. Способ регулирования по п.8, характеризующийся тем, что выходной вращающий момент электродвигателя переменного тока оценивается на основании тока по оси d и тока по оси q в электродвигателе переменного тока.
10. Способ регулирования по п.9, характеризующийся тем, что выходной вращающий момент электродвигателя переменного тока оценивается на основании тока по оси d и тока по оси q и постоянной электродвигателя переменного тока, при этом постоянная электродвигателя корректируется на основании тока по оси d и тока по оси q.
11. Способ регулирования по п.8, характеризующийся тем, что, когда выбирают второй способ регулирования, выходной вращающий момент электродвигателя переменного тока оценивается на основании измеренного тока электродвигателя и измеренного углового положения аналогично тому, как осуществляется оценка вращающего момента, заданное значение вращающего момента модифицируется на основании отклонения оцененного вращающего момента от заданного значения вращающего момента, значение команды тока вырабатывается на основании модифицированного заданного значения вращающего момента, и преобразование напряжения, выполняемое в инверторе, регулируется таким образом, что напряжение, подаваемое на электродвигатель переменного тока, регулируется на основании отклонения измеренного тока электродвигателя от выработанного значения команды тока.
12. Способ регулирования по п.8, характеризующийся тем, что второй режим регулирования включает режим синусоидальной широтно-импульсной модуляции, при котором частота модуляции лежит в диапазоне от 0 до 0,61, и режим широтно-импульсной модуляции с перемодуляцией, в котором основная гармоника искажается таким образом, что частота модуляции лежит в диапазоне от 0,61 до 0,78.
13. Способ регулирования системы привода от электродвигателя, включающей инвертор, который запускает электродвигатель переменного тока, отличающийся тем, что он содержит: шаг выбора режима регулирования инвертора из множества режимов регулирования на основании рабочего состояния электродвигателя переменного тока и шаг регулирования выходного вращающего момента электродвигателя переменного тока в выбранном режиме регулирования, при этом для регулирования выходного вращающего момента электродвигателя переменного тока используется оцененный вращающий момент, а выходной вращающий момент электродвигателя переменного тока оценивается способом, общим для множества режимов регулирования.
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ДВИГАТЕЛЕМ В ЭЛЕКТРОМЕХАНИЧЕСКОМ УСИЛИТЕЛЕ РУЛЯ АВТОМОБИЛЯ | 2001 |
|
RU2210172C2 |
| СПОСОБ ЛЕЧЕНИЯ ВОЛЧАНКИ | 2005 |
|
RU2396980C2 |
| US 2002171389 A1, 21.11.2002 | |||
| US 6388419 B1, 14.05.2002 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| JP 2005168115 A, 23.06.2005 | |||
| EP 1263125 A2, 04.12.2002 | |||
| WO 2004021556 A1, 11.03.2004. | |||

