ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Изобретение относится к области контроллеров двигателя для управления двигательной системой, оснащенной трехфазным двигателем переменного тока (AC).
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
[0002] Управление широтно-импульсной модуляции (PWM) является примером способа управления для возбуждения трехфазного AC двигателя. Управление PWM используется, чтобы управлять преобразователем энергии (например, инвертором), который преобразовывает напряжение постоянного тока (DC) (энергию DC) в напряжение AC (энергию AC) согласно количественному отношению между несущим сигналом, имеющим предварительно определенную частоту, и командным сигналом фазного напряжения, который устанавливается с целью обеспечения соответствия фазного тока, обеспечиваемого в трехфазный AC двигатель, с требуемым значением.
[0003] Когда преобразователь энергии управляется, фазный ток обычно обнаруживается с помощью датчика тока. В этом случае, значение обнаружения датчика тока может включать в себя ошибку (например, ошибку смещения, которая возникает, когда значение, полученное посредством добавления компонента DC к фактическому значению тока, выводится как значение обнаружения, или ошибку усиления, которая возникает, когда значение, полученное посредством усиления или ослабления фактического значения тока, выводится как значение обнаружения). Соответственно, способ для корректировки ошибки, включенной в значение обнаружения датчика тока, был предложен для увеличения точности обнаружения датчика тока (см. например, публикацию японской патентной заявки, номер 2000-023490 (JP 2000-023490 A). Например, JP 2000-023490 A раскрывает способ для корректировки ошибки, пока сигнал PWM, который возбуждает инвертор, не выводится из контроллера (другими словами, от момента времени после того, как двигатель был запущен, до того момента времени, пока не завершится заряд конденсатора, что является периодом времени, в котором фазный ток не течет).
[0004] Публикация японской патентной заявки, номер 2009-098091 (JP 2009-098091 A) является другим примером документов предшествующего уровня техники, относящихся к изобретению настоящей заявки.
[0005] Однако с использованием способа, раскрытого в JP 2000-023490 A, ошибка может корректироваться только немедленно после того, как двигатель запускается. Результирующая техническая проблема состоит в том, что ошибка не может корректироваться, когда осуществляется возбуждение двигателя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] С учетом вышеупомянутых проблем, представленных в качестве примера, изобретение обеспечивает контроллер двигателя, который может корректировать ошибку, включенную в значение обнаружения датчика тока.
[0007] Согласно одному аспекту изобретения, обеспечивается контроллер двигателя, который управляет двигательной системой. Двигательная система оснащена источником энергии постоянного тока, преобразователем энергии, сглаживающим конденсатором, трехфазным двигателем переменного тока, и датчиком тока. Преобразователь энергии выполнен с возможностью преобразовывать энергию постоянного тока, обеспечиваемую от источника энергии постоянного тока, в энергию переменного тока. Сглаживающий конденсатор соединен электрически параллельно с преобразователем энергии. Трехфазный двигатель переменного тока возбуждается посредством использования энергии переменного тока, выводимой из преобразователя энергии. Датчик тока обнаруживает фазный ток, обеспечиваемый в трехфазный двигатель переменного тока. Контроллер двигателя обеспечен электронным блоком управления. Электронный блок управления выполнен с возможностью: (a) определять целевую фазу, которая является фазой второго командного сигнала фазного напряжения, имеющего наибольшее отличие от первого командного сигнала фазного напряжения, имеющего уровень сигнала, который не является ни максимальным, ни минимальным уровнем сигнала, на основе командных сигналов трехфазного напряжения, генерируемых из значения обнаружения датчика тока и регулирующих работу трехфазного двигателя переменного тока; и (b) корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы напряжение на зажимах сглаживающего конденсатора соответствовало требуемому значению напряжения.
[0008] С использованием контроллера двигателя изобретения, может осуществляться управление двигательной системой. Двигательная система, которая является объектом управления, выполняемого посредством контроллера двигателя, оснащена источником энергии постоянного тока, сглаживающим конденсатором, преобразователем энергии, трехфазным двигателем переменного тока, и датчиком тока. Источник энергии постоянного тока выводит энергию постоянного тока (другими словами, напряжение постоянного тока или постоянный ток). Сглаживающий конденсатор соединен электрически параллельно с преобразователем энергии. Обычно, сглаживающий конденсатор соединен электрически параллельно с источником энергии постоянного тока. Поэтому, сглаживающий конденсатор может подавлять изменения в напряжении на зажимах сглаживающего конденсатора (то есть, напряжение на зажимах, по меньшей мере, одного из источника энергии постоянного тока и преобразователя энергии). Преобразователь энергии преобразовывает энергию постоянного тока, обеспечиваемую от источника энергии постоянного тока, в энергию переменного тока (обычно, энергию трехфазного переменного тока). Как результат, трехфазный двигатель переменного тока возбуждается посредством использования энергии переменного тока, обеспечиваемой от преобразователя энергии в трехфазный двигатель переменного тока.
[0009] Чтобы управлять такой двигательной системой, контроллер двигателя обеспечен электронным блоком управления, выполняющим описанное ниже управление. Электронный блок управления определяет целевую фазу из числа трех фаз трехфазного двигателя переменного тока на основе командных сигналов трехфазного напряжения (обычно, командного сигнала напряжения фазы U, командного сигнала напряжения фазы V, и командного сигнала напряжения фазы W). Целевая фаза является фазой второго командного сигнала фазного напряжения, имеющего наибольшее отличие от первого командного сигнала фазного напряжения, имеющего уровень сигнала, который не является ни максимальным, ни минимальным уровнем сигнала. Другими словами, целевая фаза является фазой второго командного сигнала фазного напряжения, который имеет наибольшее отличие от первого командного сигнала фазного напряжения, который имеет второй наибольший уровень сигнала (другими словами, второй наименьший уровень сигнала).
[0010] Например, когда выполняется соотношение (уровень сигнала командного сигнала напряжения фазы U)>(уровень сигнала командного сигнала напряжения фазы V)>(уровень сигнала командного сигнала напряжения фазы W), командный сигнал напряжения фазы V соответствует первому командному сигналу фазного напряжения. Дополнительно, когда выполняется вышеупомянутое соотношение и также выполняется соотношение |(уровень сигнала командного сигнала напряжения фазы U)-(уровень сигнала командного сигнала напряжения фазы V)|>|(уровень сигнала командного сигнала напряжения фазы W)-(уровень сигнала командного сигнала напряжения фазы V)|, командный сигнал напряжения фазы U соответствует второму командному сигналу фазного напряжения. Поэтому, в этом случае, фаза U является целевой фазой.
[0011] Командные сигналы фазного напряжения являются сигналами переменного тока, регулирующими работу трехфазного двигателя переменного тока. Командные сигналы фазного напряжения обычно генерируются из значения обнаружения датчика тока (другими словами, значения обнаружения, определяющего характеристики (обычно, уровень сигнала) обнаруженного фазного тока, который выводится из датчика тока, обнаруживающего фазный ток). В этом случае, например, могут генерироваться командные сигналы фазного напряжения, как надлежит, с точки зрения обеспечения соответствия крутящего момента, выводимого трехфазным двигателем переменного тока, с требуемым значением.
[0012] Дополнительно, электронный блок управления корректирует значение обнаружения датчика тока, чтобы напряжение на зажимах сглаживающего конденсатора соответствовало требуемому значению напряжения. В этом случае, электронный блок управления может корректировать значение обнаружения датчика тока, чтобы напряжение на зажимах сглаживающего конденсатора соответствовало требуемому значению напряжения, посредством прямой ссылки на напряжение на зажимах (обычно, значение обнаружения датчика напряжения, обнаруживающего напряжение на зажимах). Альтернативно, электронный блок управления может корректировать значение обнаружения датчика тока, чтобы напряжение на зажимах сглаживающего конденсатора соответствовало требуемому значению напряжения, посредством ссылки на другой параметр (например, ток конденсатора, который является током, текущим в сглаживающем конденсаторе), который косвенно указывает напряжение на зажимах. В этом случае, также можно говорить, что электронный блок управления фактически корректирует значение обнаружения датчика тока, чтобы другой параметр, косвенно указывающий напряжение на зажимах, соответствовал требуемому значению.
[0013] В частности, в контроллере двигателя изобретения, значение обнаружения датчика тока, обнаруживающего фазный ток целевой фазы, определяемой посредством электронного блока управления, корректируется, чтобы напряжение на зажимах соответствовало требуемому значению напряжения. В связи с этим, когда датчик тока, обнаруживающий фазный ток целевой фазы, определяемой посредством электронного блока управления, не присутствует (другими словами, двигательная система не обеспечена датчиком тока, обнаруживающим фазный ток целевой фазы), электронное управление не должно корректировать значение обнаружения датчика тока.
[0014] Более конкретно, в пределах периода времени, в котором электронный блок управления определяет, что целевая фаза является фазой U, электронный блок управления корректирует значение обнаружения датчика тока, обнаруживающего ток фазы U, чтобы напряжение на зажимах в пределах периода времени, в котором электронный блок управления определяет, что целевая фаза является фазой U, соответствовало требуемому значению напряжения. Однако электронный блок управления может продолжать корректировку значения обнаружения датчика тока, обнаруживающего ток фазы U, чтобы продолжать операцию коррекции, которая выполняется в пределах периода времени, в котором электронный блок управления определяет, что целевая фаза является фазой U, даже в пределах периода времени, в котором электронный блок управления не определяет, что целевая фаза является фазой U. Например, когда значение обнаружения датчика тока, обнаруживающего ток фазы U, корректируется посредством предварительно определенной величины в пределах периода времени, в котором электронный блок управления определяет, что целевая фаза является фазой U, электронный блок управления может продолжать корректировку значения обнаружения датчика тока, обнаруживающего ток фазы U, посредством предварительно определенной величины даже в пределах периода времени, в котором электронный блок управления не определяет, что целевая фаза является фазой U.
[0015] Альтернативно, например, в пределах периода времени, в котором электронный блок управления определяет, что целевая фаза является фазой V, электронный блок управления корректирует значение обнаружения датчика тока, обнаруживающего ток фазы V, чтобы напряжение на зажимах в пределах периода времени, в котором электронный блок управления определяет, что целевая фаза является фазой V, соответствовало требуемому значению напряжения. Однако электронный блок управления может продолжать корректировку значения обнаружения датчика тока, обнаруживающего ток фазы V, чтобы продолжать операцию коррекции, которая выполняется в пределах периода времени, в котором электронный блок управления определяет, что целевая фаза является фазой V, даже в пределах периода времени, в котором электронный блок управления не определяет, что целевая фаза является фазой V. Например, когда значение обнаружения датчика тока, обнаруживающего ток фазы V, корректируется в предварительно определенном режиме в пределах периода времени, в котором электронный блок управления определяет, что целевая фаза является фазой V, электронный блок управления может продолжать корректировку значения обнаружения датчика тока, обнаруживающего ток фазы V, в предварительно определенном режиме даже в пределах периода времени, в котором электронный блок управления не определяет, что целевая фаза является фазой V.
[0016] Альтернативно, например, в пределах периода времени, в котором электронный блок управления определяет, что целевая фаза является фазой W, электронный блок управления корректирует значение обнаружения датчика тока, обнаруживающего ток фазы W, чтобы напряжение на зажимах в пределах периода времени, в котором электронный блок управления определяет, что целевая фаза является фазой W, соответствовало требуемому значению напряжения. Однако электронный блок управления может продолжать корректировку значения обнаружения датчика тока, обнаруживающего ток фазы W, чтобы продолжать операцию коррекции, которая выполняется в пределах периода времени, в котором электронный блок управления определяет, что целевая фаза является фазой W, даже в пределах периода времени, в котором электронный блок управления не определяет, что целевая фаза является фазой W. Например, когда значение обнаружения датчика тока, обнаруживающего ток фазы W, корректируется в предварительно определенном режиме в пределах периода времени, в котором электронный блок управления определяет, что целевая фаза является фазой W, электронный блок управления может продолжать корректировку значения обнаружения датчика тока, обнаруживающего ток фазы W, в предварительно определенном режиме даже в пределах периода времени, в котором электронный блок управления не определяет, что целевая фаза является фазой W.
[0017] В этом случае, когда значение обнаружения датчика тока включает в себя ошибку (другими словами, отличие или отклонение между значением обнаружения датчика тока и фактическим значением фазного тока), контроллер двигателя ошибочно распознает, что значение обнаружения датчика тока является фактическим значением фазного тока. Поэтому, когда предполагается, что контроллер двигателя управляет двигательной системой, чтобы значение обнаружения датчика тока становилось требуемым значением тока, фактическое значение фазного тока изменяется посредством величины, соответствующей ошибке. Например, фактическое значение фазного тока становится значением, полученным посредством добавления ошибки к требуемому значению тока или вычитания ошибки оттуда.
[0018] В этом случае, как будет описано более подробно ниже со ссылкой на чертежи, в пределах периода времени, в котором предварительно определенная фаза является целевой фазой, изменение фазного тока предварительно определенной фазы (например, изменение по отношению к требуемому значению тока) может вызывать изменение в напряжении на зажимах сглаживающего конденсатора. Между тем, в пределах периода времени, в котором предварительно определенная фаза не является целевой фазой, изменение фазного тока предварительно определенной фазы не вызывает или почти не вызывает изменение в напряжении на зажимах сглаживающего конденсатора. Поэтому, когда напряжение на зажимах изменяется в состоянии, в котором целевая фаза была определена, является в высокой степени вероятным, что фазный ток целевой фазы изменяется. Поэтому, учитывая, что ошибка, включенная в значение обнаружения датчика тока, может вызывать изменение фазного тока, когда фазный ток целевой фазы изменяется, является в высокой степени вероятным, что ошибка включается в значение обнаружения датчика тока, обнаруживающего фазный ток целевой фазы.
[0019] Учитывая такое отношение между изменением фазного тока целевой фазы и изменением напряжения на зажимах сглаживающего конденсатора, так как электронный блок управления в контроллере двигателя изобретения определяет целевую фазу, даже когда двигательная система обеспечена множеством датчиков тока, датчики тока, в которых ошибка включается в значение обнаружения, могут определяться индивидуально. Например, даже когда двигательная система обеспечена, по меньшей мере, двумя датчиками тока, обнаруживающими индивидуально фазные токи, по меньшей мере, двух фаз, датчик тока со значением обнаружения, включающим в себя ошибку, может определяться индивидуально среди упомянутых, по меньшей мере, двух датчиков тока. Дополнительно, когда целевая фаза определяется, электронный блок управления корректирует значение обнаружения датчика тока, обнаруживающего фазный ток целевой фазы, чтобы напряжение на зажимах соответствовало требуемому значению напряжения (например, чтобы величина изменения напряжения на зажимах становилась нулевой). Как результат, когда ошибка включается в значение обнаружения датчика тока, электронный блок управления может корректировать значение обнаружения датчика тока, чтобы устранять влияние ошибки.
[0020] Дополнительно, в контроллере двигателя изобретения, электронный блок управления может определять целевую фазу на основе командных сигналов фазного напряжения, генерируемых не только немедленно после того, как двигательная система была запущена, но также после того, как предварительно определенный период времени истек с момента запуска двигательной системы (например, пока двигательная система работает в обычном режиме). В дополнение, электронный блок управления может корректировать значение обнаружения датчика тока на основе напряжения на зажимах сглаживающего конденсатора, которое может обнаруживаться не только немедленно после того, как двигательная система была запущена, но также после того, как предварительно определенный период времени истек с момента запуска двигательной системы. Поэтому, когда значение обнаружения датчика тока включает в себя ошибку, электронный блок управления может корректировать значение обнаружения датчика тока, чтобы устранять влияние ошибки, не только немедленно после того, как двигательная система была запущена, но также после того, как предварительно определенный период времени истек с момента запуска двигательной системы.
[0021] Таким образом, контроллер двигателя изобретения может корректировать значение обнаружения датчика тока (другими словами, корректировать ошибку, включенную в значение обнаружения датчика тока).
[0022] В контроллере двигателя, электронный блок управления может быть выполнен с возможностью определять режим корректировки значения обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, на основе: (i) полярности фазного тока целевой фазы; и (ii) тенденции изменения напряжения на зажимах.
[0023] С использованием контроллера двигателя вышеописанной конфигурации, электронный блок управления может предпочтительно определять режим коррекции значения обнаружения датчика тока, чтобы напряжение на зажимах соответствовало требуемому значению напряжения, на основе полярности фазного тока целевой фазы и тенденции изменения напряжения на зажимах. Поэтому, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока. Другими словами, ошибка, включенная в значение обнаружения датчика тока, может предпочтительно корректироваться.
[0024] Дополнительно, в контроллере двигателя, в котором режим коррекции значения обнаружения датчика тока определяется на основе полярности фазного тока целевой фазы и тенденции изменения напряжения на зажимах, как описано выше, электронный блок управления может быть выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, в первом режиме коррекции, когда (i) полярность фазного тока целевой фазы является первой полярностью и (ii) напряжение на зажимах изменяется в первом режиме изменения. Электронный блок управления может быть выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, во втором режиме коррекции, который отличается от первого режима коррекции, когда (i) полярность фазного тока целевой фазы является второй полярностью, которая отличается от первой полярности, и (ii) напряжение на зажимах изменяется в первом режиме изменения.
[0025] С использованием контроллера двигателя вышеописанной конфигурации, когда режим изменения напряжения на зажимах не изменяется, электронный блок управления определяет режим коррекции значения обнаружения датчика тока, чтобы режим коррекции значения обнаружения датчика тока изменялся согласно различию в полярности фазного тока целевой фазы. Как результат, электронный блок управления может предпочтительно определять режим коррекции значения обнаружения датчика тока, чтобы напряжение на зажимах соответствовало требуемому значению напряжения. Поэтому, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока. Другими словами, ошибка, включенная в значение обнаружения датчика тока, может предпочтительно корректироваться.
[0026] Дополнительно, в контроллере двигателя, в котором определяется режим коррекции значения обнаружения датчика тока, чтобы режим коррекции значения обнаружения датчика тока изменялся согласно различию в полярности фазного тока целевой фазы, как описано выше, первая полярность может быть какой-либо из положительной полярности и отрицательной полярности. Вторая полярность отличается от первой полярности среди положительной полярности и отрицательной полярности. Первый режим изменения может быть каким-либо из режима изменения, в котором напряжение на зажимах уменьшается, и режима изменения, в котором напряжение на зажимах увеличивается. Первый режим коррекции может быть каким-либо из режима коррекции, в котором значение обнаружения увеличивается, и режима коррекции, в котором значение обнаружения уменьшается. Второй режим коррекции является режимом коррекции, который отличается от первого режима коррекции, среди режима коррекции, в котором значение обнаружения увеличивается, и режима коррекции, в котором значение обнаружения уменьшается.
[0027] С использованием контроллера двигателя вышеописанной конфигурации, когда режим изменения напряжения на зажимах не изменяется, электронный блок управления может определять то, увеличивать ли или уменьшать значение обнаружения датчика тока, согласно тому, является ли полярность фазного тока целевой фазы положительной полярностью или отрицательной полярностью. Как результат, электронный блок управления может предпочтительно определять режим коррекции значения обнаружения датчика тока, чтобы напряжение на зажимах соответствовало требуемому значению напряжения. Поэтому, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока. Другими словами, ошибка, включенная в значение обнаружения датчика тока, может предпочтительно корректироваться.
[0028] Примеры операции увеличения значения обнаружения датчика тока включают в себя операцию добавления положительного значения коррекции к значению обнаружения датчика тока и операцию умножения значения обнаружения датчика тока на коэффициент, больший, чем 1. Подобным образом, примеры операции уменьшения значения обнаружения датчика тока включают в себя операцию добавления отрицательного значения коррекции к значению обнаружения датчика тока (другими словами, операцию вычитания положительного значения коррекции) и операцию умножения значения обнаружения датчика тока на коэффициент, меньший, чем 1.
[0029] Дополнительно, в контроллере двигателя, в котором режим коррекции значения обнаружения датчика тока определяется на основе полярности фазного тока целевой фазы и тенденции изменения напряжения на зажимах, как описано выше, электронный блок управления может быть выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, в первом режиме коррекции, когда (i) полярность фазного тока целевой фазы является первой полярностью и (ii) напряжение на зажимах изменяется в первом режиме изменения. Электронный блок управления может быть выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, во втором режиме коррекции, который отличается от первого режима коррекции, когда (i) полярность фазного тока целевой фазы является первой полярностью и (ii) напряжение на зажимах изменяется во втором режиме изменения, который отличается от первого режима изменения.
[0030] С использованием контроллера двигателя вышеописанной конфигурации, когда полярность фазного тока целевой фазы не изменяется, электронный блок управления определяет режим коррекции значения обнаружения датчика тока, чтобы режим коррекции значения обнаружения датчика тока изменялся согласно режиму изменения напряжения на зажимах. Как результат, электронный блок управления может предпочтительно определять режим коррекции значения обнаружения датчика тока, чтобы напряжение на зажимах соответствовало требуемому значению напряжения. Поэтому, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока. Другими словами, ошибка, включенная в значение обнаружения датчика тока, может предпочтительно корректироваться.
[0031] Дополнительно, в контроллере двигателя, в котором определяется режим коррекции значения обнаружения датчика тока, чтобы режим коррекции значения обнаружения датчика тока изменялся согласно различию в режиме изменения напряжения на зажимах, как описано выше, первая полярность может быть какой-либо из положительной полярности и отрицательной полярности. Первый режим изменения может быть каким-либо из режима изменения, в котором напряжение на зажимах уменьшается, и режима изменения, в котором напряжение на зажимах увеличивается. Второй режим изменения может быть режимом изменения, который отличается от первого режима изменения, среди режима изменения, в котором напряжение на зажимах уменьшается, и режима изменения, в котором напряжение на зажимах увеличивается. Первый режим коррекции может быть каким-либо из режима коррекции, в котором значение обнаружения увеличивается, и режима коррекции, в котором значение обнаружения уменьшается. Второй режим коррекции может быть режимом коррекции, который отличается от первого режима коррекции, среди режима коррекции, в котором значение обнаружения увеличивается, и режима коррекции, в котором значение обнаружения уменьшается.
[0032] С использованием контроллера двигателя вышеописанной конфигурации, когда полярность фазного тока целевой фазы не изменяется, электронный блок управления может определять то, увеличивать ли или уменьшать значение обнаружения датчика тока, согласно тому, увеличивается ли напряжение на зажимах или уменьшается. Как результат, электронный блок управления может предпочтительно определять режим коррекции значения обнаружения датчика тока, чтобы напряжение на зажимах соответствовало требуемому значению напряжения. Поэтому, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока. Другими словами, ошибка, включенная в значение обнаружения датчика тока, может предпочтительно корректироваться.
[0033] Дополнительно, в контроллере двигателя, в котором режим коррекции значения обнаружения датчика тока определяется на основе полярности фазного тока целевой фазы и тенденции изменения напряжения на зажимах, как описано выше, электронный блок управления может быть выполнен с возможностью: корректировать и уменьшать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, когда (i) полярность фазного тока целевой фазы является отрицательной полярностью и (ii) напряжение на зажимах уменьшается.
[0034] С таким режимом, электронный блок управления может предпочтительно определять режим коррекции значения обнаружения датчика тока, чтобы напряжение на зажимах соответствовало требуемому значению напряжения. Поэтому, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока. Другими словами, ошибка, включенная в значение обнаружения датчика тока, может предпочтительно корректироваться.
[0035] Дополнительно, в контроллере двигателя, в котором режим коррекции значения обнаружения датчика тока определяется на основе полярности фазного тока целевой фазы и тенденции изменения напряжения на зажимах, как описано выше, электронный блок управления может быть выполнен с возможностью корректировать и увеличивать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, когда (i) полярность фазного тока целевой фазы является положительной полярностью и (ii) напряжение на зажимах уменьшается.
[0036] С использованием контроллера двигателя такой конфигурации, электронный блок управления может предпочтительно определять режим коррекции значения обнаружения датчика тока, чтобы напряжение на зажимах соответствовало требуемому значению напряжения. Поэтому, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока. Другими словами, ошибка, включенная в значение обнаружения датчика тока, может предпочтительно корректироваться.
[0037] Дополнительно, в контроллере двигателя, в котором режим коррекции значения обнаружения датчика тока определяется на основе полярности фазного тока целевой фазы и тенденции изменения напряжения на зажимах, как описано выше, электронный блок управления может быть выполнен с возможностью корректировать и увеличивать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, когда (i) полярность фазного тока целевой фазы является отрицательной полярностью и (ii) напряжение на зажимах увеличивается.
[0038] С использованием контроллера двигателя такой конфигурации, электронный блок управления может предпочтительно определять режим коррекции значения обнаружения датчика тока, чтобы напряжение на зажимах соответствовало требуемому значению напряжения. Поэтому, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока. Другими словами, ошибка, включенная в значение обнаружения датчика тока, может предпочтительно корректироваться.
[0039] Дополнительно, в контроллере двигателя, в котором режим коррекции значения обнаружения датчика тока определяется на основе полярности фазного тока целевой фазы и тенденции изменения напряжения на зажимах, как описано выше, электронный блок управления может быть выполнен с возможностью корректировать и уменьшать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, когда (i) полярность фазного тока целевой фазы является положительной полярностью и (ii) напряжение на зажимах увеличивается.
[0040] С использованием контроллера двигателя такой конфигурации, электронный блок управления может предпочтительно определять режим коррекции значения обнаружения датчика тока, чтобы напряжение на зажимах соответствовало требуемому значению напряжения. Поэтому, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока. Другими словами, ошибка, включенная в значение обнаружения датчика тока, может предпочтительно корректироваться.
[0041] Дополнительно, в контроллере двигателя согласно изобретению, двигательная система может дополнительно включать в себя датчик напряжения и устройство извлечения. Датчик напряжения обнаруживает напряжение на зажимах. Устройство извлечения может быть выполнено с возможностью извлекать компоненту напряжения, имеющую частоту такую же, как частота командных сигналов фазного напряжения, из значения обнаружения датчика напряжения. Электронный блок управления может быть выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы значение напряжения компоненты напряжения, извлеченной посредством устройства извлечения, соответствовало требуемому значению напряжения.
[0042] С использованием контроллера двигателя такой конфигурации, электронный блок управления может предпочтительно корректировать компоненту ошибки (например, ошибку смещения, проистекающую из добавления компоненты постоянного тока к значению тока фактического фазного тока), имеющую частоту такую же, как частота командных сигналов фазного напряжения, среди ошибок, включенных в значение обнаружения датчика тока. Другими словами, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока, чтобы удалять влияние компоненты ошибки (например, ошибки смещения), имеющей частоту такую же, как частота командных сигналов фазного напряжения, среди ошибок, включенных в значение обнаружения датчика тока.
[0043] Дополнительно, в контроллере двигателя согласно изобретению, двигательная система может дополнительно включать в себя датчик напряжения и устройство извлечения. Датчик напряжения обнаруживает напряжение на зажимах. Устройство извлечения может быть выполнено с возможностью извлекать компоненту напряжения, имеющую частоту, которая равняется удвоенной частоте командных сигналов фазного напряжения, из значения обнаружения датчика напряжения. Электронный блок управления выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы значение напряжения компоненты напряжения, извлеченной посредством устройства извлечения, соответствовало требуемому значению напряжения.
[0044] С использованием контроллера двигателя такой конфигурации, электронный блок управления может предпочтительно корректировать компоненту ошибки (например, ошибку усиления, проистекающую из усиления или ослабления значения тока фактического фазного тока), имеющую частоту, которая равняется удвоенной частоте командных сигналов фазного напряжения, среди ошибок, включенных в значение обнаружения датчика тока. Другими словами, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока, чтобы удалять влияние компоненты ошибки (например, ошибки усиления), имеющей частоту, которая равняется удвоенной частоте командных сигналов фазного напряжения, среди ошибок, включенных в значение обнаружения датчика тока.
[0045] Дополнительно, в контроллере двигателя согласно изобретению, двигательная система может дополнительно включать в себя датчик напряжения и преобразователь напряжения. Датчик напряжения обнаруживает напряжение на зажимах. Преобразователь напряжения может быть выполнен с возможностью преобразовывать значение напряжения энергии постоянного тока, которая обеспечивается от источника энергии постоянного тока, чтобы значение напряжения соответствовало требуемому значению напряжения. Преобразователь энергии может также быть выполнен с возможностью преобразовывать энергию постоянного тока в энергию переменного тока, при этом значение напряжения, обеспечиваемое от преобразователя напряжения, преобразуется в энергию постоянного тока. Электронный блок управления может быть выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы компонента напряжения соответствовала требуемому значению напряжения, при этом компонента напряжения получается посредством удаления, из значения обнаружения датчика напряжения, влияния изменения напряжения на зажимах, вызванного посредством операции преобразования значения напряжения, которая выполняется посредством преобразователя напряжения.
[0046] Когда двигательная система обеспечена преобразователем напряжения, так как преобразователь напряжения преобразовывает значение напряжения энергии постоянного тока в требуемое значение напряжения, напряжение на зажимах сглаживающего конденсатора соответствует требуемому значению напряжения независимо от того, корректируется ли или нет значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, посредством электронного блока управления. Другими словами, так как для напряжения на зажимах сглаживающего конденсатора обеспечивается соответствие с требуемым значением напряжения посредством работы преобразователя напряжения, даже когда ошибка включается в значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, эта ошибка не вызывает изменения в напряжении на зажимах сглаживающего конденсатора. По этой причине, электронный блок управления, который только корректирует значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы напряжение на зажимах сглаживающего конденсатора соответствовало требуемому значению напряжения, не может корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, когда ошибка включается в значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы.
[0047] Между тем, напряжение на зажимах сглаживающего конденсатора включает в себя компоненту напряжения (другими словами, изменение напряжения на зажимах), вызванную ошибкой, включенной в значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, в дополнение к компоненте напряжения (другими словами, изменению напряжения на зажимах), вызванной посредством операции преобразования значения напряжения, выполняемой посредством преобразователя напряжения. Поэтому, может предполагаться, что компонента напряжения, полученная посредством удаления влияния изменения напряжения на зажимах, вызванного посредством операции преобразования значения напряжения, выполняемой посредством преобразователя напряжения, из напряжения на зажимах, обнаруженного посредством датчика напряжения, имеет корреляцию с изменением напряжения на зажимах, вызванным ошибкой, включенной в значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы.
[0048] Соответственно, в этом режиме, электронный блок управления обрабатывает компоненту напряжения, которая получается посредством удаления влияния изменения напряжения на зажимах, вызванного посредством операции преобразования значения напряжения, выполняемой посредством преобразователя напряжения, из значения обнаружения датчика напряжения, обнаруживающего напряжение на зажимах, как реальное напряжение на зажимах. Другими словами, электронный блок управления корректирует значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы компонента напряжения, которая получается посредством удаления влияния изменения напряжения на зажимах, вызванного посредством операции преобразования значения напряжения, выполняемой посредством преобразователя напряжения, из значения обнаружения датчика напряжения, обнаруживающего напряжение на зажимах, соответствовала требуемой компоненте напряжения. Как результат, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока. Другими словами, ошибка датчика тока может предпочтительно корректироваться.
[0049] Дополнительно, в контроллере двигателя согласно изобретению, двигательная система может дополнительно включать в себя датчик напряжения и преобразователь напряжения. Датчик напряжения обнаруживает напряжение на зажимах. Преобразователь напряжения может быть выполнен с возможностью преобразовывать значение напряжения энергии постоянного тока, которая обеспечивается от источника энергии постоянного тока, чтобы компонента напряжения соответствовала требуемому значению напряжения, при этом компонента напряжения получается посредством удаления, из значения обнаружения датчика напряжения, компоненты напряжения, имеющей частоту такую же, как частота командных сигналов фазного напряжения, и компоненты напряжения, имеющей частоту, равную удвоенной частоте командных сигналов фазного напряжения. Преобразователь энергии может быть выполнен с возможностью преобразовывать энергию постоянного тока в энергию переменного тока, при этом значение напряжения, обеспечиваемое от преобразователя напряжения, преобразуется в энергию постоянного тока.
[0050] Когда двигательная система обеспечена преобразователем напряжения, так как преобразователь напряжения преобразовывает значение напряжения энергии постоянного тока в требуемое значение напряжения, напряжение на зажимах сглаживающего конденсатора соответствует требуемому значению напряжения независимо от того, корректируется ли или нет значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, посредством электронного блока управления. Другими словами, так как для напряжения на зажимах сглаживающего конденсатора обеспечивается соответствие с требуемым значением напряжения посредством работы преобразователя напряжения, даже когда ошибка включается в значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, эта ошибка не вызывает изменения в напряжении на зажимах сглаживающего конденсатора. По этой причине, электронный блок управления, который только корректирует значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы напряжение на зажимах сглаживающего конденсатора соответствовало требуемому значению напряжения, не может корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, когда ошибка включается в значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы.
[0051] В этой конфигурации, напряжение на зажимах сглаживающего конденсатора также включает в себя компоненту напряжения (другими словами, изменение напряжения на зажимах), вызванную ошибкой, включенной в значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, в дополнение к компоненте напряжения (другими словами, изменению напряжения на зажимах), вызванной посредством операции преобразования значения напряжения, выполняемой посредством преобразователя напряжения. Поэтому, преобразователь напряжения преобразовывает значение напряжения, чтобы напряжение на зажимах, также включающее в себя компоненту напряжения, вызванную ошибкой, включенной в значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, становилось требуемым значением напряжения. Поэтому, напряжение на зажимах сглаживающего конденсатора соответствует требуемому значению напряжения независимо от того, корректируется ли или нет значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, посредством электронного блока управления. Рассматривая такую компоненту напряжения для напряжения на зажимах сглаживающего конденсатора, где преобразователь энергии преобразовывает значение напряжения, чтобы компонента напряжения, которая получается посредством удаления компоненты напряжения, вызванной ошибкой, включенной в значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, из напряжения на зажимах, становилась требуемым значением напряжения, можно сказать, что, когда ошибка включается в значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, напряжение на зажимах не соответствует требуемому значению напряжения.
[0052] Соответственно, в этом режиме, преобразователь энергии преобразовывает значение напряжения энергии постоянного тока, обеспечиваемой от источника энергии постоянного тока, чтобы компонента напряжения, полученная посредством удаления компоненты напряжения (в этом случае, компоненты напряжения, имеющей частоту такую же, как частота командных сигналов фазного напряжения, и компоненты напряжения, имеющей частоту, которая равняется удвоенной частоте командных сигналов фазного напряжения), вызванной ошибкой, включенной в значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, из значения обнаружения (то есть, напряжения на зажимах) датчика напряжения, становилась требуемым значением напряжения. Поэтому, электронный блок управления может корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы напряжение на зажимах, изменяющееся вследствие ошибки, включенной в значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, соответствовало требуемому значению напряжения. Как результат, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока. Другими словами, ошибка, включенная в значение обнаружения датчика тока, может предпочтительно корректироваться.
[0053] Преобразователь энергии также может преобразовывать значение напряжения энергии постоянного тока, обеспечиваемой от источника энергии постоянного тока, чтобы значение напряжения компоненты напряжения, полученное посредством удаления компоненты напряжения, вызванной ошибкой, включенной в значение обнаружения датчика тока, из значения обнаружения датчика напряжения, соответствовало требуемому значению напряжения.
[0054] В контроллере двигателя согласно изобретению, электронный блок управления может быть выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы ток конденсатора, текущий в сглаживающем конденсаторе, соответствовал требуемому значению тока.
[0055] С использованием контроллера двигателя вышеописанной конфигурации, электронный блок управления может корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы ток конденсатора соответствовал требуемому значению тока, в дополнение к, или вместо корректировки значения обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы напряжение на зажимах соответствовало требуемому значению напряжения, с учетом корреляции между напряжением на зажимах сглаживающего конденсатора и током, текущим в сглаживающем конденсаторе (то есть, током конденсатора). Другими словами, электронный блок управления может корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы ток конденсатора соответствовал требуемому значению тока, посредством прямой ссылки на ток конденсатора в дополнение к, или вместо прямой ссылки на напряжение на зажимах. Даже в этом случае, электронный блок управления может корректировать значение обнаружения датчика тока, чтобы напряжение на зажимах соответствовало требуемому значению напряжения. Как результат, электронный блок управления может предпочтительно корректировать значение обнаружения датчика тока. Другими словами, ошибка, включенная в значение обнаружения датчика тока, может предпочтительно корректироваться.
[0056] Работа и другие преимущества контроллера двигателя согласно изобретению станут видны из вариантов осуществления, описанных ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0057] Признаки, преимущества, и техническая и промышленная значимость примерных вариантов осуществления изобретения будут описываться ниже со ссылкой на сопровождающие чертежи, на которых сходные ссылочные позиции обозначают сходные элементы, и на которых:
Фиг. 1 является блок-схемой, показывающей конфигурацию транспортного средства первого варианта осуществления изобретения;
Фиг. 2 является блок-схемой, показывающей конфигурацию блока ECU (в частности, конфигурацию для управления работой инвертора) в первом варианте осуществления;
Фиг. 3 является блок-схемой последовательности операций, показывающей поток операции управления инвертором в первом варианте осуществления;
Фиг. 4A и 4B являются графиками, иллюстрирующими отношение между сигналом обнаружения тока фазы V и фактическим током фазы V в случае, когда в сигнале обнаружения тока фазы V генерируется ошибка;
Фиг. 5A и 5B являются графиками, показывающими отношение между трехфазными токами (другими словами, током фазы U, током фазы V, и током фазы W), током конденсатора, и напряжением на зажимах в случае, когда ошибка включается в сигнал обнаружения тока фазы V, и также отношение между трехфазными токами (другими словами, током фазы U, током фазы V, и током фазы W), током конденсатора, и напряжением на зажимах в случае, когда никакая ошибка не включается в сигнал обнаружения тока фазы V;
Фиг. 6A и 6B являются графиком и таблицей, показывающими отношение между фазой тока конденсатора и количественным отношением между командными сигналами трехфазного напряжения (другими словами, командным сигналом напряжения фазы U, командным сигналом напряжения фазы V, и командным сигналом напряжения фазы W);
Фиг. 7A и 7B являются пояснительными диаграммами, показывающими состояние переключающих элементов, обеспеченных в инверторе;
Фиг. 8 является графиком, показывающим отношение между командными сигналами трехфазного напряжения и состоянием переключающих элементов, обеспеченных в инверторе;
Фиг. 9A, 9B, и 9C являются графиками, показывающими режимы изменения величины коррекции фазы V (величины коррекции фазы W), сигнала обнаружения тока фазы V (сигнала обнаружения тока фазы W), и напряжение на зажимах в случае корректировки сигнала обнаружения тока фазы V (сигнала обнаружения тока фазы W);
Фиг. 10 является блок-схемой, показывающей конфигурацию транспортного средства второго варианта осуществления;
Фиг. 11 является блок-схемой, показывающей конфигурацию транспортного средства третьего варианта осуществления;
Фиг. 12 является блок-схемой, показывающей конфигурацию транспортного средства четвертого варианта осуществления;
Фиг. 13 является блок-схемой, показывающей конфигурацию транспортного средства пятого варианта осуществления; и
Фиг. 14 является блок-схемой, показывающей конфигурацию блока ECU (в частности, конфигурацию для управления работой инвертора) в пятом варианте осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0058] Ниже описываются варианты осуществления контроллера транспортного средства. Сначала, описывается первый вариант осуществления со ссылкой на фиг. 1 по 9A, 9B, и 9C. Конфигурация транспортного средства 1 первого варианта осуществления описывается со ссылкой на фиг. 1. Фиг. 1 является блок-схемой конфигурации транспортного средства 1 первого варианта осуществления.
[0059] Как показано на фиг. 1, транспортное средство 1 обеспечено источником 11 энергии постоянного тока (DC), сглаживающим конденсатором 12, датчиком 12v напряжения, инвертором 13, который является конкретным примером "преобразователя энергии", двигателем-генератором 14, который является конкретным примером "трехфазного двигателя переменного тока (AC)", датчиком 14v тока фазы V, датчиком 14w тока фазы W, и электронным блоком 15 управления (ECU), который является конкретным примером "контроллера двигателя".
[0060] Источник 11 энергии DC является заряжаемым электрическим накопительным устройством. Источник 11 энергии DC является, например, вторичным аккумулятором (например, никель-металлгидридным аккумулятором или литиево-ионным аккумулятором) или конденсатором (например, электрическим конденсатором с двойным слоем или конденсатором высокой емкости).
[0061] Сглаживающий конденсатор 12 является сглаживающим напряжение конденсатором, соединенным между линией положительного электрода источника 11 энергии DC и линией отрицательного электрода источника 11 энергии DC. Другими словами, сглаживающий конденсатор 12 служит для сглаживания флуктуаций напряжения VH на зажимах между линией положительного электрода и линией отрицательного электрода.
[0062] Датчик 12v напряжения обнаруживает напряжение VH на зажимах сглаживающего конденсатора 12. Сигнал обнаружения датчика 12v напряжения (называемый ниже, как надлежит, "сигнал VH* обнаружения напряжения на зажимах") используется блоком ECU 15.
[0063] Инвертор 13 преобразовывает энергию DC (напряжение DC), обеспечиваемую от источника 11 энергии DC, в энергию AC (трехфазное AC напряжение). Чтобы преобразовывать энергию DC (напряжение DC) в энергию AC (трехфазное AC напряжение), инвертор 13 обеспечен плечом фазы U, включающим в себя переключающий элемент Qup p-стороны и переключающий элемент Qun n-стороны, плечом фазы V, включающим в себя переключающий элемент Qvp p-стороны и переключающий элемент Qvn n-стороны, и плечом фазы W, включающим в себя переключающий элемент Qwp p-стороны и переключающий элемент Qwn n-стороны. Плечи инвертора 13 соединены параллельно между линией положительного электрода и линией отрицательного электрода. Переключающий элемент Qup p-стороны и переключающий элемент Qun n-стороны соединены последовательно между линией положительного электрода и линией отрицательного электрода. Переключающий элемент Qvp p-стороны и переключающий элемент Qvn n-стороны соединены аналогичным образом. Переключающий элемент Qwp p-стороны и переключающий элемент Qwn n-стороны также соединены аналогичным образом. Выпрямляющий диод Dup, через который электрический ток течет от вывода эмиттера переключающего элемента Qup p-стороны к выводу коллектора переключающего элемента Qup p-стороны, соединен с переключающим элементом Qup p-стороны. Выпрямляющие диоды Dun по Dwn подобным образом соединены с переключающим элементом Qun n-стороны по переключающий элемент Qwn n-стороны, соответственно. Промежуточная точка верхнего плеча (другими словами, каждый переключающий элемент p-стороны) и нижнего плеча (другими словами, каждый переключающий элемент n-стороны) каждого плеча фазы в инверторе 13 соединена с соответствующей фазовой катушкой двигателя-генератора 14. Как результат, энергия AC (трехфазная энергия AC), генерируемая как результат операции преобразования, выполняемой посредством инвертора 13, обеспечивается в двигатель-генератор 14.
[0064] Двигатель-генератор 14 является трехфазным AC двигателем-генератором. Двигатель-генератор 14 работает, чтобы генерировать крутящий момент, необходимый, чтобы транспортное средство 1 двигалось. Крутящий момент, генерируемый двигателем-генератором 14, передается, чтобы приводить в движение колеса посредством приводного вала, механически соединенного с вращающимся валом двигателя-генератора 14. Двигатель-генератор 14 также может выполнять рекуперацию (генерирование) энергии, когда транспортное средство 1 затормаживается.
[0065] Датчик 14v тока фазы V обнаруживает фазный ток (то есть, ток Iv фазы V), текущий в обмотке фазы V двигателя-генератора 14. Сигнал обнаружения датчика 14v тока фазы V (называемый ниже, как надлежит, "сигнал Iv* обнаружения тока фазы V") используется, как надлежит, блоком ECU 15.
[0066] Датчик 14w тока фазы W обнаруживает фазный ток (то есть, ток Iw фазы W), текущий в обмотке фазы W двигателя-генератора 14. Сигнал обнаружения датчика 14w тока фазы W (называемый ниже, как надлежит, "сигнал Iw* обнаружения тока фазы W") используется, как надлежит, блоком ECU 15.
[0067] ECU 15 является электронным блоком управления для управления работой транспортного средства 1. В частности, в первом варианте осуществления, ECU 15 выполняет операцию управления инвертором для управления работой инвертора 13. Операция управления инвертором, выполняемая посредством ECU 15, описывается более подробно ниже (см. например, фиг. 3).
[0068] Конфигурация блока ECU 15 (в частности, конфигурация для управления работой инвертора 13) описывается ниже со ссылкой на фиг. 2. Фиг. 2 является блок-схемой, показывающей конфигурацию блока ECU 15 (в частности, конфигурацию для управления работой инвертора 13) первого варианта осуществления.
[0069] Как показано на фиг. 2, ECU 15 обеспечен блоком 151 преобразования команды тока, блоком 152 трехфазного/двухфазного преобразования, блоком 153 управления током, блоком 154 двухфазного/трехфазного преобразования, блоком 155 преобразования PWM, блоком 156 определения фазы тока конденсатора, который является конкретным примером "устройства определения", блоком 157 вычисления величины коррекции, который является конкретным примером "устройства коррекции" (более конкретно, блоком 157v вычисления величины коррекции фазы V и блоком 157w вычисления величины коррекции фазы W), и модулем 158 добавления, который является конкретным примером "устройства коррекции" (более конкретно, модулем 158v добавления фазы V и модулем 158w добавления фазы W).
[0070] Блок 151 преобразования команды тока генерирует командный сигнал двухфазного тока (то есть, командный сигнал Idtg тока d-оси и командный сигнал Iqtg тока q-оси) на основе значения TR команды крутящего момента трехфазного AC двигателя 14. Блок 151 преобразования команды тока выводит командный сигнал Idtg тока d-оси и командный сигнал Iqtg тока q-оси в блок 153 управления током.
[0071] Блок 152 трехфазного/двухфазного преобразования получает ток Iv фазы V (более конкретно, сигнал Iv* обнаружения тока фазы V, который является сигналом обнаружения датчика 14v тока) в качестве информации обратной связи от датчика 14v тока фазы V. Блок 152 трехфазного/двухфазного преобразования также получает ток Iw фазы W (более конкретно, сигнал Iw* обнаружения тока фазы W, который является сигналом обнаружения датчика 14w тока) в качестве информации обратной связи от датчика 14w тока фазы W. Блок 152 трехфазного/двухфазного преобразования преобразовывает сигнал Iv* обнаружения тока фазы V и сигнал Iw* обнаружения тока фазы W, соответствующие значениям трехфазного тока, в ток Id d-оси и ток Iq q-оси, соответствующие значениям двухфазного тока. Блок 152 трехфазного/двухфазного преобразования выводит ток Id d-оси и ток Iq q-оси в блок 153 управления током.
[0072] Блок 153 управления током генерирует командный сигнал Vd напряжения d-оси и командный сигнал Vq напряжения q-оси, которые соответствуют командным сигналам двухфазного напряжения, на основе разности между командным сигналом Idtg тока d-оси и командным сигналом Iqtg тока q-оси, которые выводятся из блока 151 преобразования команды тока, и тока Id d-оси и тока Iq q-оси, выводимых из блока 152 трехфазного/двухфазного преобразования. В этом случае, блок 153 управления током может генерировать командный сигнал Vd напряжения d-оси и командный сигнал Vq напряжения q-оси посредством использования пропорционально-интегрального (PI) управления или пропорционально-интегрально-дифференциального (PID) управления. Блок 153 управления током выводит командный сигнал Vd напряжения d-оси и командный сигнал Vq напряжения q-оси в блок 154 двухфазного/трехфазного преобразования.
[0073] Блок 154 двухфазного/трехфазного преобразования преобразовывает командный сигнал Vd напряжения d-оси и командный сигнал Vq напряжения q-оси в командный сигнал Vu напряжения фазы U, командный сигнал Vv напряжения фазы V, и командный сигнал Vw напряжения фазы W, которые являются командными сигналами трехфазного напряжения. Блок 154 двухфазного/трехфазного преобразования выводит командный сигнал Vu напряжения фазы U, командный сигнал Vv напряжения фазы V, и командный сигнал Vw напряжения фазы W в блок 155 преобразования PWM.
[0074] Блок 155 преобразования PWM генерирует сигнал Gup PWM фазы U для возбуждения переключающего элемента Qup p-стороны и сигнал Gun PWM фазы U для возбуждения переключающего элемента Qun n-стороны на основе количественного отношения между командным сигналом Vu напряжения фазы U и несущим сигналом C, имеющим предварительно определенную несущую частоту f. Например, блок 155 преобразования PWM может генерировать сигналы Gup и Gun PWM фазы U для включения переключающего элемента Qup p-стороны, где для командного сигнала Vu напряжения фазы U, который находится в состоянии, более низком, чем несущий сигнал C, должно обеспечиваться соответствие с несущим сигналом C. Между тем, например, когда для командного сигнала Vu напряжения фазы U, который находится в состоянии, более высоком, чем несущий сигнал C, должно обеспечиваться соответствие с несущим сигналом C, блок 155 преобразования PWM может генерировать сигналы Gup и Gun PWM фазы U для включения переключающего элемента Qun n-стороны. Блок 155 преобразования PWM выводит сигналы Gup и Gun PWM фазы U в инвертор 13. Как результат, инвертор 13 (в частности, переключающий элемент Qup p-стороны и переключающий элемент Qun n-стороны, составляющие плечо фазы U инвертора 13) работает в ответ на сигналы Gup и Gun PWM фазы U.
[0075] Дополнительно, блок 155 преобразования PWM генерирует сигнал Gvp PWM фазы V для возбуждения переключающего элемента Qvp p-стороны и сигнал Gvn PWM фазы V для возбуждения переключающего элемента Qvn n-стороны на основе количественного отношения между командным сигналом Vv напряжения фазы V и несущим сигналом C. В дополнение, блок 155 преобразования PWM генерирует сигнал Gwp PWM фазы W для возбуждения переключающего элемента Qwp p-стороны и сигнал Gwn PWM фазы W для возбуждения переключающего элемента Qwn n-стороны на основе количественного отношения между командным сигналом Vw напряжения фазы W и несущим сигналом C. Режим генерирования сигналов Gvp и Gvn PWM фазы V и сигналов Gwp и Gwn PWM фазы W является таким же, как режим генерирования сигналов Gup и Gun PWM фазы U.
[0076] Блок 156 определения фазы тока конденсатора определяет фазу тока конденсатора. Другими словами, блок 156 определения фазы тока конденсатора определяет, является ли или нет фаза тока конденсатора фазой U, является ли или нет фаза тока конденсатора фазой V, и является ли или нет фаза тока конденсатора фазой W. Другими словами, блок 156 определения фазы тока конденсатора определяет то, какая фаза среди фазы U, фазы V, и фазы W является фазой тока конденсатора. Фаза тока конденсатора, как здесь упоминается, является фазой основного фазного тока, который регулирует ток Ic конденсатора (то есть, ток, текущий в сглаживающем конденсаторе 12). Например, как будет описываться подробно ниже, учитывая, что волновая форма тока Ic конденсатора является повторением прерывистых импульсов (см. например, фиг. 5A и 5B), фаза тока конденсатора является фазой фазного тока, имеющего уровень сигнала, по существу, такой же формы, что и виртуальная линия, соединяющая пиковые значения волновых форм импульса тока Ic конденсатора (другими словами, фазного тока, формирующего виртуальную линию, соединяющую пиковые значения тока Ic конденсатора).
[0077] Работа блока 156 определения фазы тока конденсатора будет описываться более подробно ниже (см. фиг. 6A, 6B, и 8). Поэтому подробное описание работы блока 156 определения фазы тока конденсатора здесь пропускается.
[0078] Блок 157v вычисления величины коррекции фазы V вычисляет величину Cv коррекции (величину коррекции фазы V) для корректировки сигнала Iv* обнаружения тока фазы V, который является сигналом обнаружения датчика 14v тока фазы V. Более конкретно, блок 157v вычисления величины коррекции фазы V вычисляет величину Cv коррекции фазы V, необходимую для корректировки (обычно, устранения) ошибки αv, включенной в сигнал Iv* обнаружения тока фазы V.
[0079] В частности, является предпочтительным, чтобы блок 157v вычисления величины коррекции фазы V вычислял величину Cv коррекции фазы V на основе сигнала VH* обнаружения напряжения на зажимах, который должен вводиться в блок 157v вычисления величины коррекции фазы V, в пределах периода времени, в котором фаза тока конденсатора определяется как фаза V. Более конкретно, когда ошибка αv включается в сигнал Iv* обнаружения тока фазы V, ошибка αv может вызывать увеличение/уменьшение в напряжении VH на зажимах (другими словами, сигнале VH* обнаружения напряжения на зажимах). Поэтому, в настоящем варианте осуществления, блок 157v вычисления величины коррекции фазы V может вычислять величину Cv коррекции фазы V, чтобы величина увеличения/уменьшения (величина изменения) сигнала VH* обнаружения напряжения на зажимах становилась, по существу, нулевой. Другими словами, блок 157v вычисления величины коррекции фазы V может вычислять величину Cv коррекции фазы V, чтобы сигнал VH* обнаружения напряжения на зажимах соответствовал требуемому значению напряжения.
[0080] Блок 157w вычисления величины коррекции фазы W вычисляет величину Cw коррекции (величину коррекции фазы W) для корректировки сигнала Iw* обнаружения тока фазы W, который является сигналом обнаружения датчика 14w тока фазы W. Более конкретно, блок 157w вычисления величины коррекции фазы W вычисляет величину Cw коррекции фазы W, необходимую для корректировки ошибки αw, включенной в сигнал Iw* обнаружения тока фазы W.
[0081] В частности, является предпочтительным, чтобы блок 157w вычисления величины коррекции фазы W вычислял величину Cw коррекции фазы W на основе сигнала VH* обнаружения напряжения на зажимах, который должен вводиться в блок 157w вычисления величины коррекции фазы W, в пределах периода времени, в котором фаза тока конденсатора определяется как фаза W. Более конкретно, когда ошибка αw включается в сигнал Iw* обнаружения тока фазы W, ошибка αw может вызывать увеличение/уменьшение в напряжении VH на зажимах (другими словами, сигнале VH* обнаружения напряжения на зажимах). Поэтому, в настоящем варианте осуществления, блок 157w вычисления величины коррекции фазы W может вычислять величину Cw коррекции фазы W, чтобы величина увеличения/уменьшения (величина изменения) сигнала VH* обнаружения напряжения на зажимах становилась, по существу, нулевой. Другими словами, блок 157w вычисления величины коррекции фазы W может вычислять величину Cw коррекции фазы W, чтобы сигнал VH* обнаружения напряжения на зажимах соответствовал требуемому значению напряжения.
[0082] Работа блока 157v вычисления величины коррекции фазы V и блока 157w вычисления величины коррекции фазы W будет описываться ниже более подробно. Поэтому подробное описание работы блока 157v вычисления величины коррекции фазы V и блока 157w вычисления величины коррекции фазы W здесь пропускается.
[0083] Модуль 158v добавления фазы V добавляет величину Cv коррекции фазы V, вычисленную посредством блока 157v вычисления величины коррекции фазы V, к сигналу Iv* обнаружения тока фазы V. Как результат, ошибка αv, включенная в сигнал Iv* обнаружения тока фазы V, корректируется (обычно, устраняется). Как результат, величина увеличения/уменьшения (величина изменения) напряжения VH на зажимах сглаживающего конденсатора 12 становится, по существу, нулевой.
[0084] Модуль 158w добавления фазы W добавляет величину Cw коррекции фазы W, вычисленную посредством блока 157w вычисления величины коррекции фазы W, к сигналу Iw* обнаружения тока фазы W. Как результат, ошибка αw, включенная в сигнал Iw* обнаружения тока фазы W, корректируется (обычно, устраняется). Как результат, величина увеличения/уменьшения (величина изменения) напряжения VH на зажимах сглаживающего конденсатора 12 становится, по существу, нулевой.
[0085] Поток операции управления инвертором, выполняемой в транспортном средстве 1 первого варианта осуществления (другими словами, операции управления инвертором, выполняемой посредством ECU 15) будет описываться ниже со ссылкой на фиг. 3. Фиг. 3 является блок-схемой последовательности операций, показывающей поток операции управления инвертором в первом варианте осуществления.
[0086] Как показано на фиг. 3, блок 154 двухфазного/трехфазного преобразования генерирует командные сигналы трехфазного напряжения (то есть, командный сигнал Vu напряжения фазы U, командный сигнал Vv напряжения фазы V, и командный сигнал Vw напряжения фазы W) (этап S11). Способ для генерирования командных сигналов трехфазного напряжения описан выше со ссылкой на фиг. 2.
[0087] Затем, блок 155 преобразования PWM генерирует сигналы Gup и Gun PWM фазы U на основе количественного отношения между сигналом Vu напряжения фазы U и несущим сигналом C (этап S12). Подобным образом, блок преобразования PWM генерирует сигналы Gvp и Gvn PWM фазы V на основе количественного отношения между сигналом Vv напряжения фазы V и несущим сигналом C (этап S12). Подобным образом, блок 155 преобразования PWM генерирует сигналы Gwp и Gwn PWM фазы W на основе количественного отношения между сигналом Vw напряжения фазы W и несущим сигналом C (этап S12). Как результат, инвертор 13 возбуждается на основе сигналов PWM.
[0088] До или после операций этапа S11 и этапа S12, или параллельно с ними, ECU 15 корректирует ошибку αv, включенную в сигнал Iv* обнаружения тока фазы V, который является сигналом обнаружения датчика 14v тока фазы V (этап S21 по этап S24). ECU 15 также корректирует ошибку αw, включенную в сигнал Iw* обнаружения тока фазы W, который является сигналом обнаружения датчика 14w тока фазы W (этап S21 по этап S24).
[0089] Случай, в котором ошибка αv включается в сигнал Iv* обнаружения тока фазы V, описывается ниже со ссылкой на фиг. 4A, 4B, 5A, и 5B. Фиг. 4A и 4B показывают графики, представляющие отношение между сигналом Iv* обнаружения тока фазы V в случае, когда ошибка αv включается в сигнал Iv* обнаружения тока фазы V, и фактическим током Iv фазы V. Фиг. 5A и 5B являются графиками, представляющими отношение между трехфазными токами (то есть, током Iu фазы U, током Iv фазы V, и током Iw фазы W), током Ic конденсатора, и напряжением VH на зажимах в случае, когда ошибка αv включается в сигнал Iv* обнаружения тока фазы V, и также отношение между трехфазными токами (то есть, током Iu фазы U, током Iv фазы V, и током Iw фазы W), током Ic конденсатора, и напряжением VH на зажимах, в случае, когда ошибка αv не включается в сигнал Iv* обнаружения тока фазы V.
[0090] Как показано на фиг. 4A, предполагается, что ошибка αv включается в сигнал Iv* обнаружения тока фазы V. Другими словами, предполагается, что сигнал Iv* обнаружения тока фазы V является значением, полученным посредством добавления ошибки αv к фактическому току Iv фазы V (другими словами, сигнал Iv* обнаружения тока фазы V=фактический ток Iv фазы V + ошибка αv). Также предполагается, что первоначально фактический ток Iv фазы V соответствует целевому значению Ivt тока. В примере, показанном на фиг. 4A, ошибка αv является ошибкой смещения.
[0091] В этом случае, как показано на фиг. 4B, ECU 15 управляет работой инвертора 13, чтобы сигнал Iv* обнаружения тока фазы V соответствовал целевому значению Ivt тока (см. операцию из этапа S11 по этап S12 из фиг. 3). Как результат, фактический ток Iv фазы V становится током, который меньше, чем целевое значение Ivt тока на ошибку αv (другими словами, (ток фазы V TV)=(целевое значение Ivt тока)-(ошибка αv)). Другими словами, фактический ток Iv фазы V меньше, чем ток, который должен получаться (то есть, целевое значение Ivt тока).
[0092] В этом случае, каждый фазный ток последовательно регулирует ток Ic конденсатора, текущий в сглаживающем конденсаторе 12. Обычно фазный ток с нулевым уровнем сигнала регулирует ток Ic конденсатора до тех пор, когда предварительно определенный период времени истечет после того, как уровень сигнала фазного тока становится нулевым. Например, фиг. 5A показывает пример, в котором ток Ic конденсатора в периоде T51 времени регулируется посредством тока Iu фазы U положительной полярности, ток Ic конденсатора в периоде T52 времени регулируется посредством тока Iw фазы W отрицательной полярности, ток Ic конденсатора в периоде T53 времени регулируется посредством тока фазы V положительной полярности, ток Ic конденсатора в периоде T54 времени регулируется посредством тока фазы U отрицательной полярности, ток Ic конденсатора в периоде T55 времени регулируется посредством тока фазы W положительной полярности, и ток Ic конденсатора в периоде T56 времени регулируется посредством тока фазы V отрицательной полярности. Когда ток Ic конденсатора регулируется посредством фазного тока отрицательной полярности, можно сказать, что фазный ток, полученный посредством обращения полярности фазного тока отрицательной полярности, регулирует ток Ic конденсатора. Поэтому, в примере, показанном на фиг. 5A, фаза тока конденсатора является фазой U в пределах периода T51 времени и периода T54 времени. Подобным образом, в примере, показанном на фиг. 5A, фаза тока конденсатора является фазой W в пределах периода T52 времени и периода T55 времени. Подобным образом, в примере, показанном на фиг. 5A, фаза тока конденсатора является фазой V в пределах периода T53 времени и периода T56 времени. После периода T57 времени, состояние в пределах периода T51 времени до периода T56 времени повторяется.
[0093] Когда сигнал Iv* обнаружения тока фазы V включает в себя ошибку αv, как показано на фиг. 5A, фактический ток Iv фазы V имеет значение, которое меньше на ошибку αv, чем целевое значение Ivt тока. Между тем, предполагается, что фактический ток Iu фазы U и фактический ток Iw фазы W соответствуют целевому значению Ivt тока. В этом случае, волновая форма сигнала тока Iv фазы V сдвигается в отрицательном направлении по отношению к волновым формам сигнала тока Iu фазы U и тока Iw фазы W. Поэтому, ток Ic конденсатора в пределах периода времени, в котором фаза тока конденсатора является фазой V, увеличивается или уменьшается по сравнению с током Ic конденсатора в пределах периода времени, в котором фаза тока конденсатора является фазой U или фазой V. Более конкретно, ток Ic конденсатора в пределах периода T53 времени, в котором фаза тока конденсатора является фазой V, уменьшается по отношению к току Ic конденсатора в пределах периода времени, в котором фаза тока конденсатора является фазой U или фазой V. Между тем, ток Ic конденсатора в пределах периода T56 времени, в котором фаза тока конденсатора является фазой V, увеличивается по отношению к току Ic конденсатора в пределах периода времени, в котором фаза тока конденсатора является фазой U или фазой V.
[0094] Уменьшение тока Ic конденсатора означает уменьшение в потреблении энергии в двигателе-генераторе 14. Как результат, как показано на фиг. 5A, уменьшение тока Ic конденсатора ведет к увеличению в напряжении VH на зажимах сглаживающего конденсатора 12. Подобным образом, увеличение в токе Ic конденсатора означает увеличение в потреблении энергии в двигателе-генераторе 14. Как результат, как показано на фиг. 5A, увеличение тока Ic конденсатора ведет к уменьшению в напряжении VH на зажимах сглаживающего конденсатора 12. По этой причине, когда ошибка (ошибка смещения) αv включается в сигнал Iv* обнаружения тока фазы V, напряжение VH на зажимах изменяется на частоте, равной частоте сигнала Iv* обнаружения тока фазы V. Обычно, когда ошибка αv включается в сигнал Iv* обнаружения тока фазы V, напряжение VH на зажимах изменяется в пределах периода времени, в котором фаза тока конденсатора является фазой V.
[0095] Когда ошибка (ошибка усиления) αv включается в сигнал Iv* обнаружения тока фазы V, напряжение VH на зажимах изменяется с частотой, равной удвоенной частоте сигнала Iv* обнаружения тока фазы V (этот случай не показан на фигурах, чтобы упростить описание).
[0096] На фиг. 4A, 4B, 5A, и 5B, описание осуществляется посредством использования примера, в котором ошибка αv включается в сигнал Iv* обнаружения тока фазы V. Однако такой же результат получается, когда ошибка αw включается в сигнал Iw* обнаружения тока фазы W. Другими словами, когда ошибка (ошибка смещения) αw включается в сигнал Iw* обнаружения тока фазы W, напряжение VH на зажимах изменяется на частоте, равной частоте сигнала Iw* обнаружения тока фазы W. Обычно, когда ошибка αw включается в сигнал Iw* обнаружения тока фазы W, напряжение VH на зажимах изменяется в пределах периода времени, в котором фаза тока конденсатора является фазой W.
[0097] Между тем, когда ошибка αv не включается в сигнал Iv* обнаружения тока фазы V, как показано на фиг. 5B, волновая форма сигнала тока Iv фазы V не сдвигается в отрицательном направлении по отношению к волновым формам сигнала тока Iu фазы U и тока Iw фазы W. Поэтому, ток Ic конденсатора в пределах периода времени, в котором фаза тока конденсатора является фазой V, является, по существу, таким же, как ток Ic конденсатора в пределах периода времени, в котором фаза тока конденсатора является фазой U или фазой V. Поэтому, когда ошибка (ошибка смещения) αv не включается в сигнал Iv* обнаружения тока фазы V, напряжение VH на зажимах почти не изменяется.
[0098] Такие изменения в напряжении VH на зажимах могут вести к отказу переключающих элементов, обеспеченных в инверторе 13. Поэтому, очевидно, должны выполняться этапы, чтобы улучшать характеристику выдерживаемого напряжения переключающих элементов, чтобы предотвращать отказ переключающих элементов. Альтернативно, должны выполняться этапы, чтобы увеличивать электростатическую емкость сглаживающего конденсатора, чтобы подавлять изменения в напряжении VH на зажимах. Однако эти меры увеличивают стоимость и не являются, поэтому, необходимо наилучшими мерами. По этой причине, в настоящем варианте осуществления, выполняются этапы, чтобы корректировать ошибку αv, включенную в сигнал Iv* обнаружения тока фазы V, которая является исходной причиной изменений в напряжении VH на зажимах.
[0099] Исследуя этапы для корректировки ошибки αv, когда ошибка αv включается в сигнал Iv* обнаружения тока фазы V, напряжение VH на зажимах изменяется в пределах периода времени, в котором фаза тока конденсатора является фазой V. Подобным образом, когда ошибка αw включается в сигнал Iw* обнаружения тока фазы W, напряжение VH на зажимах изменяется в пределах периода времени, в котором фаза тока конденсатора является фазой W. Поэтому, посредством обнаружения изменения напряжения VH на зажимах, ECU 15 может распознавать, что имеется относительно высокая вероятность, что, по меньшей мере, какой-либо из сигнала Iv* обнаружения тока фазы V и сигнала Iw* обнаружения тока фазы W включает в себя ошибку. Дополнительно, посредством определения фазы тока конденсатора в пределах периода времени, в котором напряжение VH на зажимах изменяется, ECU 15 может определять, какой из сигнала Iv* обнаружения тока фазы V и сигнала Iw* обнаружения тока фазы W включает в себя ошибку. Другими словами, посредством определения фазы тока конденсатора и отслеживания изменения напряжения VH на зажимах, ECU 15 может индивидуально определять и также корректировать как ошибку αv, включенную в сигнал Iv* обнаружения тока фазы V, так и ошибку αw, включенную в сигнал Iw* обнаружения тока фазы W.
[0100] Более конкретно, когда сигнал VH* обнаружения напряжения на зажимах изменяется, в то время как фаза V определяется как фаза тока конденсатора, ECU 15 может распознавать, что ошибка αv включается в сигнал Iv* обнаружения тока фазы V. Поэтому, в этом случае, ECU 15 вычисляет величину Cv коррекции фазы V для корректировки тока Iv* обнаружения тока фазы V, чтобы величина изменения сигнала VH* обнаружения напряжения на зажимах в пределах периода времени, в котором фаза V определяется как фаза тока конденсатора, становилась нулевой, в то время как фаза V определяется как фаза тока конденсатора. Как результат, ECU 15 может корректировать (устранять) ошибку αv, включенную в сигнал Iv* обнаружения тока фазы V.
[0101] Подобным образом, когда сигнал VH* обнаружения напряжения на зажимах изменяется, в то время как фаза W определяется как фаза тока конденсатора, ECU 15 может распознавать, что ошибка αw включается в сигнал Iw* обнаружения тока фазы W. Поэтому, в этом случае, ECU 15 вычисляет величину Cw коррекции фазы W для корректировки тока Iw* обнаружения тока фазы W, чтобы величина изменения сигнала VH* обнаружения напряжения на зажимах в пределах периода времени, в котором фаза W определяется как фаза тока конденсатора, становилась нулевой, в то время как фаза W определяется как фаза тока конденсатора. Как результат, ECU 15 может корректировать (устранять) ошибку αw, включенную в сигнал Iw* обнаружения тока фазы W.
[0102] Описание операции для корректировки ошибки αv, включенной в сигнал Iv* обнаружения тока фазы V, и ошибки αw, включенной в сигнал Iw* обнаружения тока фазы W, продолжается ниже снова со ссылкой на фиг. 3.
[0103] Как показано на фиг. 3, чтобы корректировать ошибку αv, включенную в сигнал Iv* обнаружения тока фазы V, и ошибку αw, включенную в сигнал Iw* обнаружения тока фазы W, блок 156 определения фазы тока конденсатора сначала определяет фазу тока конденсатора (этап S21).
[0104] В первом варианте осуществления, блок 156 определения фазы тока конденсатора использует количественное отношение между командными сигналами трехфазного напряжения (то есть, командным сигналом Vu напряжения фазы U, командным сигналом Vv напряжения фазы V, и командным сигналом Vw напряжения фазы W), чтобы определять фазу тока конденсатора.
[0105] Более конкретно, в первом варианте осуществления, блок 156 определения фазы тока конденсатора сначала определяет командный сигнал напряжения центральной фазы, имеющий уровень сигнала, который не является ни наибольшим, ни наименьшим среди командного сигнала Vu напряжения фазы U, командного сигнала Vv напряжения фазы V, и командного сигнала Vw напряжения фазы W. Другими словами, блок 156 определения фазы тока конденсатора сначала определяет командный сигнал напряжения центральной фазы со вторым наибольшим (или вторым наименьшим) уровнем сигнала среди командного сигнала Vu напряжения фазы U, командного сигнала Vv напряжения фазы V, и командного сигнала Vw напряжения фазы W. Конкретно, блок 156 определения фазы тока конденсатора сначала определяет командный сигнал напряжения центральной фазы, имеющий уровень сигнала, самый близкий к нулевому уровню (или среднему значению уровней сигналов командного сигнала Vu напряжения фазы U, командного сигнала Vv напряжения фазы V, и командного сигнала Vw напряжения фазы W) среди командного сигнала Vu напряжения фазы U, командного сигнала Vv напряжения фазы V, и командного сигнала Vw напряжения фазы W.
[0106] Затем, блок 156 определения фазы тока конденсатора определяет в качестве фазы тока конденсатора фазу командного сигнала фазного напряжения, который не является командным сигналом напряжения центральной фазы и имеет более большое абсолютное значение разности в уровне сигнала с командным сигналом напряжения центральной фазы, среди командного сигнала Vu напряжения фазы U, командного сигнала Vv напряжения фазы V, и командного сигнала Vw напряжения фазы W. Другими словами, блок 156 определения фазы тока конденсатора определяет в качестве фазы тока конденсатора фазу командного сигнала фазного напряжения, который является самым дальним от командного сигнала напряжения центральной фазы, среди командного сигнала Vu напряжения фазы U, командного сигнала Vv напряжения фазы V, и командного сигнала Vw напряжения фазы W.
[0107] Операция определения фазы тока конденсатора на основе количественного отношения между командными сигналами трехфазного напряжения (то есть, командным сигналом Vu напряжения фазы U, командным сигналом Vv напряжения фазы V, и командным сигналом Vw напряжения фазы W) описывается ниже со ссылкой на фиг. 6A и 6B. Фиг. 6A и 6B являются графиком и таблицей, иллюстрирующими отношение между фазой тока конденсатора и количественное отношение между командными сигналами трехфазного напряжения (то есть, командным сигналом Vu напряжения фазы U, командным сигналом Vv напряжения фазы V, и командным сигналом Vw напряжения фазы W).
[0108] В командных сигналах трехфазного напряжения, показанных на фиг. 6A, рассмотрим период #4 времени. В периоде #4 времени, является справедливым следующее отношение: (уровень сигнала командного сигнала Vw напряжения фазы W)<(уровень сигнала командного сигнала Vv напряжения фазы V)<(уровень сигнала командного сигнала Vu напряжения фазы U). Поэтому, в этом случае, как показано на фиг. 6B, командный сигнал Vv напряжения фазы V становится командным сигналом напряжения центральной фазы. Дополнительно, в пределах периода #4 времени, также является действительным следующее отношение: |(уровень сигнала командного сигнала Vu напряжения фазы U)-(уровень сигнала командного сигнала Vv напряжения фазы V)|>|(уровень сигнала командного сигнала Vw напряжения фазы W)-(уровень сигнала командного сигнала Vv напряжения фазы V)|. Поэтому, в этом случае, как показано на фиг. 6B, определяется, что фаза U является фазой тока конденсатора.
[0109] Дополнительно, как показано на фиг. 6A и 6B, в пределах периода # 1 времени и периода # 7 времени, в которых выполняются соотношение (уровень сигнала командного сигнала Vv напряжения фазы V)<(уровень сигнала командного сигнала Vu напряжения фазы U)<(уровень сигнала командного сигнала Vw напряжения фазы W) и соотношение |(уровень сигнала командного сигнала Vv напряжения фазы V)-(уровень сигнала командного сигнала Vu напряжения фазы U)|>|(уровень сигнала командного сигнала Vw напряжения фазы W)-(уровень сигнала командного сигнала Vu напряжения фазы U)|, командный сигнал Vu напряжения фазы U становится командным сигналом напряжения центральной фазы и фаза V является фазой тока конденсатора. Подобным образом, в пределах периода # 2 времени и периода # 8 времени, в которых выполняются соотношение (уровень сигнала командного сигнала Vv напряжения фазы V)<(уровень сигнала командного сигнала Vw напряжения фазы W)<(уровень сигнала командного сигнала Vu напряжения фазы U) и соотношение|(уровень сигнала командного сигнала Vv напряжения фазы V)-(уровень сигнала командного сигнала Vw напряжения фазы W)|>|(уровень сигнала командного сигнала Vu напряжения фазы U)-(уровень сигнала командного сигнала Vw напряжения фазы W)|, командный сигнал Vw напряжения фазы W становится командным сигналом напряжения центральной фазы и фаза V является фазой тока конденсатора. Подобным образом, в пределах периода # 3 времени и периода # 9 времени, в которых выполняются соотношение (уровень сигнала командного сигнала Vv напряжения фазы V)<(уровень сигнала командного сигнала Vw напряжения фазы W)<(уровень сигнала командного сигнала Vu напряжения фазы U) и соотношение |(уровень сигнала командного сигнала Vu напряжения фазы U)-(уровень сигнала командного сигнала Vw напряжения фазы W)|>|(уровень сигнала командного сигнала Vv напряжения фазы V)-(уровень сигнала командного сигнала Vw напряжения фазы W)|, командный сигнал Vw напряжения фазы W становится командным сигналом напряжения центральной фазы и фаза U является фазой тока конденсатора. Подобным образом, в пределах периода # 4 времени и периода # 10 времени, в которых выполняются соотношение (уровень сигнала командного сигнала Vw напряжения фазы W)<(уровень сигнала командного сигнала Vv напряжения фазы V)<(уровень сигнала командного сигнала Vu напряжения фазы U) и соотношение |(уровень сигнала командного сигнала Vu напряжения фазы U)-(уровень сигнала командного сигнала Vv напряжения фазы V)|>|(уровень сигнала командного сигнала Vw напряжения фазы W)-(уровень сигнала командного сигнала Vv напряжения фазы V)|, командный сигнал Vv напряжения фазы V становится командным сигналом напряжения центральной фазы и фаза U является фазой тока конденсатора. Подобным образом, в пределах периода # 5 времени и периода # 11 времени, в которых выполняются соотношение (уровень сигнала командного сигнала Vw напряжения фазы W)<(уровень сигнала командного сигнала Vv напряжения фазы V)<(уровень сигнала командного сигнала Vu напряжения фазы U) и соотношение |(уровень сигнала командного сигнала Vw напряжения фазы W)-(уровень сигнала командного сигнала Vv напряжения фазы V)|>|(уровень сигнала командного сигнала Vu напряжения фазы U)-(уровень сигнала командного сигнала Vv напряжения фазы V)|, командный сигнал Vv напряжения фазы V становится командным сигналом напряжения центральной фазы и фаза W является фазой тока конденсатора. Подобным образом, в пределах периода # 6 времени и периода # 12 времени, в которых выполняются соотношение (уровень сигнала командного сигнала Vw напряжения фазы W)<(уровень сигнала командного сигнала Vu напряжения фазы U)<(уровень сигнала командного сигнала Vv напряжения фазы V) и соотношение |(уровень сигнала командного сигнала Vw напряжения фазы W)-(уровень сигнала командного сигнала Vu напряжения фазы U)|>|(уровень сигнала командного сигнала Vv напряжения фазы V)-(уровень сигнала командного сигнала Vu напряжения фазы U)|, командный сигнал Vu напряжения фазы U становится командным сигналом напряжения центральной фазы и фаза W является фазой тока конденсатора.
[0110] В этом случае, причина, почему является возможным определять значение тока конденсатора на основе количественного отношения между командными сигналами трехфазного напряжения (то есть, командным сигналом Vu напряжения фазы U, командным сигналом Vv напряжения фазы V, и командным сигналом Vw напряжения фазы W), будет описана ниже со ссылкой на фиг. 7A, 7B, и 8. Фиг. 7A и 7B являются пояснительными чертежами, показывающими состояние каждого переключающего элемента в инверторе 13. Фиг. 8 является графиком, показывающим отношение между командными сигналами трехфазного напряжения и состоянием переключающих элементов в инверторе 13.
[0111] Причина описывается с использованием примера, в котором текут ток Iu фазы U, ток Iv фазы V, и ток Iw фазы W, показанные на фиг. 7A, и состояние переключающих элементов в инверторе 13 изменяется в режиме, показанном на фиг. 7A. При рассмотрении периода T71 времени, ток Iu фазы U и ток Iw фазы W имеют положительную полярность (направление электрического тока от инвертора 13 к двигателю-генератору 14 берется в качестве положительной полярности), тогда как ток Iv фазы V имеет отрицательную полярность. Дополнительно, в пределах периода T71 времени, переключающий элемент Gup P-стороны плеча фазы U находится во включенном состоянии, тогда как переключающий элемент Gun n-стороны плеча фазы U находится в выключенном состоянии. Подобным образом в пределах периода T71 времени, переключающий элемент Gvp P-стороны плеча фазы V находится в выключенном состоянии, тогда как переключающий элемент Gvn n-стороны плеча фазы V находится во включенном состоянии. Подобным образом в пределах периода T71 времени, переключающий элемент Gwp P-стороны плеча фазы W находится в выключенном состоянии, тогда как переключающий элемент Gwn n-стороны плеча фазы W находится во включенном состоянии.
[0112] В этом случае, как показано на фиг. 7B, например, часть тока Iv фазы V, текущего от двигателя-генератора 14 по направлению к инвертору 13, возвращается как ток Iw фазы W из инвертора 13 в двигатель-генератор 14. Другая часть тока Iv фазы V, текущего от двигателя-генератора 14 к инвертору 13, течет как ток Iu фазы U через сглаживающий конденсатор 12 в плечо фазы U. Другими словами, в пределах периода T71 времени, ток Iu фазы U соответствует самому току Ic конденсатора.
[0113] Когда также рассматриваются различные состояния переключающих элементов инвертора 13, которые отличаются от состояний в пределах периода T71 времени, можно обнаружить, что ток Ic конденсатора соответствует фазному току фазы переключающего элемента p-стороны, который независимо находится во включенном состоянии среди трех переключающих элементов p-стороны, или фазному току фазы переключающего элемента n-стороны, который независимо находится во включенном состоянии, (однако его полярность является обратной) среди трех переключающих элементов n-стороны. Учитывая, что состояние переключения трех переключающих элементов p-стороны и трех переключающих элементов n-стороны изменяется от момента к моменту, фазный ток, соответствующий току Ic конденсатора, также изменяется от момента к моменту. Другими словами, фазный ток некоторой конкретной фазы почти не соответствует току Ic конденсатора в течение длительного периода времени. Поэтому, фаза тока конденсатора, которая является фазой основного фазного тока, определяющего ток Ic конденсатора, является фактически фазой фазного тока, для которого период времени соответствия току Ic конденсатора в пределах предварительно определенного периода времени является самым длинным.
[0114] Соответственно, при описании операции определения фазы фазного тока, для которого период времени соответствия току Ic конденсатора является самым длинным, рассмотрим пример командных сигналов трехфазного напряжения, для которых являются справедливыми соотношения (уровень сигнала командного сигнала Vw напряжения фазы W)<(уровень сигнала командного сигнала Vu напряжения фазы U)<(уровень сигнала командного сигнала Vv напряжения фазы V) и |(уровень сигнала командного сигнала Vv напряжения фазы V)-(уровень сигнала командного сигнала Vu напряжения фазы U)|<|(уровень сигнала командного сигнала Vw напряжения фазы W)-(уровень сигнала командного сигнала Vu напряжения фазы U)|, как показано на фиг. 8. В частности, на фиг. 8, рассматривается самый короткий период времени, соответствующий несущему сигналу C одного периода.
[0115] Как показано на фиг. 8, в самом коротком периоде времени, соответствующем несущему сигналу C одного периода, имеется период времени, в котором ток Iv фазы V соответствует току Ic конденсатора, и период времени, в котором ток Iw фазы W соответствует току Ic конденсатора. Другими словами, является очевидным, что фазный ток, соответствующий фазе командного сигнала фазного напряжения с максимальным уровнем сигнала, и фазный ток, соответствующий фазе командного сигнала фазного напряжения с минимальным уровнем сигнала, соответствуют току Ic конденсатора.
[0116] В этом случае, как показано на фиг. 8, период времени, в котором ток Iw фазы W соответствует току Ic конденсатора, является более длительным, чем период времени, в котором ток Iv фазы V соответствует току Ic конденсатора. Другими словами, период времени, в котором ток Iw фазы W соответствует току Ic конденсатора, является самым длинным. Другими словами, ясно, что период времени, в котором фазный ток, соответствующий фазе командного сигнала фазного напряжения (командного сигнала Vw напряжения фазы W в примере, показанном на фиг. 8) с более большим абсолютным значением разности от уровня сигнала командного сигнала напряжения центральной фазы (командного сигнала Vu напряжения фазы U в примере, показанном на фиг. 8), соответствует току Ic конденсатора, является самым длинным.
[0117] Таким образом, блок 156 определения фазы тока конденсатора может определять фазу тока конденсатора на основе количественного отношения между трехфазными командными сигналами (другими словами, командным сигналом Vu напряжения фазы U, командным сигналом Vv напряжения фазы V, и командным сигналом Vw напряжения фазы W).
[0118] Снова, как показано на фиг. 2 и 3, после того, как блок 156 определения фазы тока конденсатора определяет фазу тока конденсатора, вычисляется величина коррекции для корректировки сигнала обнаружения датчика 14v тока фазы V или датчика 14w тока фазы W для обнаружения фазного тока фазы тока конденсатора.
[0119] Более конкретно, когда определяется, что фаза V является фазой тока конденсатора, блок 157v вычисления величины коррекции фазы V вычисляет величину увеличения/уменьшения (величину изменения) сигнала VH* обнаружения напряжения на зажимах, который должен вводиться в блок 157v вычисления величины коррекции фазы V, в пределах периода времени, в котором фаза V определяется как фаза тока конденсатора (этап S22). Например, блок 157v вычисления величины коррекции фазы V может вычислять в качестве величины увеличения/уменьшения сигнала VH* обнаружения напряжения на зажимах разность между сигналом VH* обнаружения напряжения на зажимах в начальной точке периода времени, в котором фаза V определяется как фаза тока конденсатора, и сигналом VH* обнаружения напряжения на зажимах в конечной точке периода времени, в котором фаза V определяется как фаза тока конденсатора.
[0120] Подобным образом, когда определяется, что фаза W является фазой тока конденсатора, блок 157w вычисления величины коррекции фазы W вычисляет величину увеличения/уменьшения (величину изменения) сигнала VH* обнаружения напряжения на зажимах, который должен вводиться в блок 157w вычисления величины коррекции фазы W, в пределах периода времени, в котором фаза W определяется как фаза тока конденсатора (этап S22). Например, блок 157w вычисления величины коррекции фазы W может вычислять в качестве величины увеличения/уменьшения сигнала VH* обнаружения напряжения на зажимах разность между сигналом VH* обнаружения напряжения на зажимах в начальной точке периода времени, в котором фаза W определяется как фаза тока конденсатора, и сигналом VH* обнаружения напряжения на зажимах в конечной точке периода времени, в котором фаза W определяется как фаза тока конденсатора.
[0121] Затем, блок 157v вычисления величины коррекции фазы V вычисляет величину Cv коррекции фазы V для корректировки сигнала Iv* обнаружения тока фазы V, чтобы величина увеличения/уменьшения сигнала VH* обнаружения напряжения на зажимах, вычисленная на этапе S22, (то есть, величина увеличения/уменьшения сигнала VH* обнаружения напряжения на зажимах в пределах периода времени, в котором фаза V определяется как фаза тока конденсатора) становилась нулевой (этап S23). В этом случае, блок 157v вычисления величины коррекции фазы V может вычислять величину Cv коррекции фазы V, например, посредством выполнения управления PI на основе величины увеличения/уменьшения сигнала VH* обнаружения напряжения на зажимах (или на основе самого сигнала VH* обнаружения напряжения на зажимах).
[0122] Полярность величины Cv коррекции фазы V, которая, таким образом, вычисляется, может быть, например, полярностью тока Iv фазы V в пределах периода времени, в котором фаза V определяется как фаза тока конденсатора, и полярностью, соответствующей тенденции изменения сигнала VH* обнаружения напряжения на зажимах.
[0123] Например, как показано на вышеупомянутой фиг. 5A, когда ошибка αv положительной полярности (другими словами, ошибка, вызывающая состояние, в котором обнаруживается сигнал Iv* обнаружения тока фазы V, который является более большим, чем фактический ток Iv фазы V) включается в сигнал Iv* обнаружения тока фазы V, напряжение VH на зажимах (сигнал VH* обнаружения напряжения на зажимах) увеличивается в состоянии, в котором полярность сигнала фазы V является положительной полярностью, и напряжение VH на зажимах (сигнал VH* обнаружения напряжения на зажимах) уменьшается в состоянии, в котором полярность сигнала фазы V является отрицательной полярностью. В этом случае, чтобы корректировать ошибку αv положительной полярности, которая включается в сигнал Iv* обнаружения тока фазы V, является предпочтительным, чтобы вычислялась величина Cv коррекции фазы V отрицательной полярности, которая может уменьшать сигнал Iv* обнаружения тока фазы V как результат добавления к сигналу Iv* обнаружения тока фазы V. Другими словами, когда полярность тока фазы V является положительной полярностью и сигнал VH* обнаружения напряжения на зажимах увеличивается, или когда полярность тока фазы V является отрицательной полярностью и сигнал VH* обнаружения напряжения на зажимах уменьшается, является предпочтительным, чтобы вычислялась величина Cv коррекции фазы V отрицательной полярности.
[0124] Между тем, когда ошибка αv отрицательной полярности (другими словами, ошибка, вызывающая состояние, в котором обнаруживается сигнал Iv* обнаружения тока фазы V, который меньше, чем фактический ток Iv фазы V) включается в сигнал Iv* обнаружения тока фазы V, напряжение VH на зажимах (сигнал VH* обнаружения напряжения на зажимах) уменьшается в состоянии, в котором полярность сигнала фазы V является положительной полярностью, и напряжение VH на зажимах (сигнал VH* обнаружения напряжения на зажимах) увеличивается в состоянии, в котором полярность сигнала фазы V является отрицательной полярностью. В этом случае, чтобы корректировать ошибку αv отрицательной полярности, которая включается в сигнал Iv* обнаружения тока фазы V, является предпочтительным, чтобы вычислялась величина Cv коррекции фазы V положительной полярности, которая может увеличивать сигнал Iv* обнаружения тока фазы V как результат добавления к сигналу Iv* обнаружения тока фазы V. Другими словами, когда полярность тока фазы V является положительной полярностью и сигнал VH* обнаружения напряжения на зажимах уменьшается, или когда полярность тока фазы V является отрицательной полярностью и сигнал VH* обнаружения напряжения на зажимах увеличивается, является предпочтительным, чтобы вычислялась величина Cv коррекции фазы V положительной полярности.
[0125] Дополнительно, размер величины Cv коррекции фазы V, которая, таким образом, вычисляется, может соответствовать, например, величине изменения сигнала VH* обнаружения напряжения на зажимах в пределах периода времени, в котором фаза V определяется как фаза тока конденсатора. Например, величина Cv коррекции фазы V может увеличиваться с увеличением величины изменения сигнала VH* обнаружения напряжения на зажимах в пределах периода времени, в котором фаза V определяется как фаза тока конденсатора. Другими словами, величина Cv коррекции фазы V может уменьшаться с уменьшением величины изменения сигнала VH* обнаружения напряжения на зажимах в пределах периода времени, в котором фаза V определяется как фаза тока конденсатора.
[0126] Подобным образом, блок 157w вычисления величины коррекции фазы W вычисляет величину Cw коррекции фазы W для корректировки сигнала Iw* обнаружения тока фазы W, чтобы величина увеличения/уменьшения (вычисленная на этапе S22) сигнала VH* обнаружения напряжения на зажимах в пределах периода времени, в котором фаза W определяется как фаза тока конденсатора, становилась нулевой (этап S23). В этом случае, блок 157w вычисления величины коррекции фазы W может вычислять величину Cw коррекции фазы W, например, посредством выполнения управления PI на основе величины увеличения/уменьшения сигнала VH* обнаружения напряжения на зажимах (или на основе самого сигнала VH* обнаружения напряжения на зажимах).
[0127] Полярность величины Cw коррекции фазы W, которая, таким образом, вычисляется, может быть, например, полярностью тока Iw фазы W в пределах периода времени, в котором фаза W определяется как фаза тока конденсатора, и полярностью, соответствующей тенденции изменения сигнала VH* обнаружения напряжения на зажимах. Детали являются такими же, как в случае полярности величины Cv коррекции фазы V. Дополнительно, размер величины Cw коррекции фазы W, которая, таким образом, вычисляется, может соответствовать, например, величине изменения сигнала VH* обнаружения напряжения на зажимах в пределах периода времени, в котором фаза W определяется как фаза тока конденсатора. Детали являются такими же, как в случае полярности величины Cv коррекции фазы V.
[0128] Затем, модуль 158v добавления фазы V добавляет величину Cv коррекции фазы V, которая была вычислена посредством блока 157v вычисления величины коррекции фазы V на этапе S23 (см. фиг. 9A), к сигналу Iv* обнаружения тока фазы V (этап S24). Является предпочтительным, чтобы модуль 158v добавления фазы V продолжал добавление величины Cv коррекции фазы V, которая была вычислена в пределах периода времени, в котором фаза V определяется как фаза тока конденсатора, к сигналу Iv* обнаружения тока фазы V даже в пределах периода времени, в котором фаза V не определяется как фаза тока конденсатора. Ошибка αv, включенная в сигнал Iv* обнаружения тока фазы V, таким образом, корректируется, как показано на фиг. 9B. Как результат, как показано на фиг. 9C, величина увеличения/уменьшения напряжения VH на зажимах сглаживающего конденсатора 12 становится, по существу, нулевой.
[0129] Подобным образом, модуль 158w добавления фазы W добавляет величину Cw коррекции фазы W, которая была вычислена посредством блока 157W вычисления величины коррекции фазы W на этапе S23 (см. фиг. 9A), к сигналу Iw* обнаружения тока фазы W (этап S24). Является предпочтительным, чтобы модуль 158w добавления фазы W продолжал добавление величины Cw коррекции фазы W, которая была вычислена в пределах периода времени, в котором фаза W определяется как фаза тока конденсатора, к сигналу Iw* обнаружения тока фазы W даже в пределах периода времени, в котором фаза W не определяется как фаза тока конденсатора. Ошибка αw, включенная в сигнал Iw* обнаружения тока фазы W, таким образом, корректируется, как показано на фиг. 9B. Как результат, как показано на фиг. 9C, величина увеличения/уменьшения напряжения VH на зажимах сглаживающего конденсатора 12 становится, по существу, нулевой.
[0130] С помощью операции управления инвертором первого варианта осуществления, который описан выше, ECU 15 может предпочтительно корректировать сигнал Iv* обнаружения тока фазы V, который является сигналом обнаружения датчика 14v тока фазы V. Другими словами, ECU 15 может предпочтительно корректировать ошибку αv, включенную в сигнал Iv* обнаружения тока фазы V. Подобным образом, ECU 15 может предпочтительно корректировать сигнал Iw* обнаружения тока фазы W, который является сигналом обнаружения датчика 14w тока фазы W. Другими словами, ECU 15 может предпочтительно корректировать ошибку αw, включенную в сигнал Iw* обнаружения тока фазы W.
[0131] В частности, в первом варианте осуществления, ECU 15 определяет фазу тока конденсатора. Поэтому, даже когда транспортное средство 1 обеспечено множеством датчиков тока (другими словами, датчиком 14v тока фазы V и датчиком 14w тока фазы W), сигналы обнаружения датчиков тока могут индивидуально корректироваться, чтобы корректировать индивидуально ошибки, включенные в сигналы обнаружения датчиков тока. Другими словами, ECU 15 может индивидуально корректировать ошибку αv, включенную в сигнал Iv* обнаружения тока фазы V, при том, что не формируется никакого или практически никакого влияния на сигнал Iw* обнаружения тока фазы W. Подобным образом, ECU 15 может индивидуально корректировать ошибку αw, включенную в сигнал Iw* обнаружения тока фазы W, при том, что не формируется никакого или практически никакого влияния на сигнал Iv* обнаружения тока фазы V.
[0132] Дополнительно, в первом варианте осуществления, ECU 15 может предпочтительно корректировать сигнал Iv* обнаружения тока фазы V и сигнал Iw* обнаружения тока фазы W при условии, что ECU 15 генерирует командные сигналы трехфазного напряжения.
[0133] В описании выше, транспортное средство 1 обеспечено двумя датчиками тока (другими словами, датчиком 14v тока фазы V и датчиком 14w тока фазы W). Однако транспортное средство 1 также может обеспечиваться одним, или тремя или более датчиками тока. Например, транспортное средство 1 может обеспечиваться, по меньшей мере, одним датчиком тока для обнаружения, по меньшей мере, одного из тока Iu фазы U, тока Iv фазы V, и тока Iw фазы W. В этом случае, ECU 15 может оснащаться блоком 157 вычисления величины коррекции и модулем 158 добавления, соответствующими фазе, для которой обеспечивается датчик тока. Другими словами, ECU 15 может не оснащаться блоком 157 вычисления величины коррекции и модулем 158 добавления, соответствующими фазе, для которой не обеспечивается датчик тока.
[0134] Транспортное средство 2 второго варианта осуществления будет описываться ниже со ссылкой на фиг. 10. Фиг. 10 является блок-схемой, показывающей конфигурацию транспортного средства 2 второго варианта осуществления. Так как составляющие элементы и операции в транспортном средстве 2 второго варианта осуществления являются такими же, как составляющие элементы и операции в транспортном средстве 1 первого варианта осуществления, им назначены такие же ссылочные позиции и ссылочные позиции этапов и их подробное описание здесь пропускается.
[0135] Как показано на фиг. 10, транспортное средство 2 второго варианта осуществления отличается от транспортного средства 1 первого варианта осуществления в том, что дополнительно обеспечивается полосовой фильтр (BPF) 251, который является конкретным примером "устройства извлечения". Другие составляющие элементы транспортного средства 2 второго варианта осуществления являются такими же, как другие составляющие элементы транспортного средства 1 первого варианта осуществления.
[0136] BPF 251 извлекает компоненту напряжения конкретной частоты из сигнала VH* обнаружения напряжения на зажимах (то есть, напряжения VH на зажимах, обнаруженного посредством датчика 12v напряжения).
[0137] Компонента напряжения конкретной частоты, извлеченная посредством BPF 251, является, например, компонентой напряжения, имеющей частоту, равную частоте командных сигналов трехфазного напряжения. Компонента напряжения, имеющая частоту, равную частоте командных сигналов трехфазного напряжения, по существу, соответствует компоненте изменения напряжения VH на зажимах, вызванной посредством, по меньшей мере, одной из ошибки (более конкретно, ошибки смещения) αv, включенной в сигнал Iv* обнаружения тока фазы V, и ошибки (более конкретно, ошибки смещения) αw, включенной в сигнал Iw* обнаружения тока фазы W.
[0138] Компонента напряжения конкретной частоты, извлеченная посредством BPF 251, является, например, компонентой напряжения, имеющей частоту, которая равняется удвоенной частоте командных сигналов трехфазного напряжения. Компонента напряжения, имеющая частоту, которая равняется удвоенной частоте командных сигналов трехфазного напряжения, по существу, соответствует компоненте изменения напряжения VH на зажимах, вызванной посредством, по меньшей мере, одной из ошибки (более конкретно, ошибки усиления) αv, включенной в сигнал Iv* обнаружения тока фазы V, и ошибки (более конкретно, ошибки усиления) αw, включенной в сигнал Iw* обнаружения тока фазы W.
[0139] Во втором варианте осуществления, блок 157v вычисления величины коррекции фазы V вычисляет величину увеличения/уменьшения (величину изменения) компоненты напряжения конкретной частоты, которая должна вводиться в блок 157v вычисления величины коррекции фазы V, в пределах периода времени, в котором фаза V определяется как фаза тока конденсатора. Затем, блок 157v вычисления величины коррекции фазы V вычисляет величину Cv коррекции фазы V для корректировки сигнала Iv* обнаружения тока фазы V, чтобы величина увеличения/уменьшения компоненты напряжения становилась нулевой.
[0140] В этом случае, например, когда компонента напряжения с конкретной частотой является компонентой напряжения, имеющей частоту такую же, как частота командных сигналов трехфазного напряжения, блок 157v вычисления величины коррекции фазы V может вычислять величину Cv коррекции фазы V, необходимую для корректировки ошибки (более конкретно, ошибки смещения) αv, включенной в сигнал Iv* обнаружения тока фазы V. Альтернативно, например, когда компонента напряжения с конкретной частотой является компонентой напряжения, имеющей частоту, равную удвоенной частоте командных сигналов трехфазного напряжения, блок 157v вычисления величины коррекции фазы V может вычислять величину Cv коррекции фазы V, необходимую для корректировки ошибки (более конкретно, ошибки усиления) αv, включенной в сигнал Iv* обнаружения тока фазы V.
[0141] Подобным образом, блок 157w вычисления величины коррекции фазы W вычисляет величину увеличения/уменьшения (величину изменения) компоненты напряжения конкретной частоты, которая должна вводиться в блок 157w вычисления величины коррекции фазы W, в пределах периода времени, в котором фаза W определяется как фаза тока конденсатора. Затем, блок 157w вычисления величины коррекции фазы W вычисляет величину Cw коррекции фазы W для корректировки сигнала Iw* обнаружения тока фазы W, чтобы величина увеличения/уменьшения компоненты напряжения становилась нулевой.
[0142] В этом случае, например, когда компонента напряжения с конкретной частотой является компонентой напряжения, имеющей частоту такую же, как частота командных сигналов трехфазного напряжения, блок 157w вычисления величины коррекции фазы W может вычислять величину Cw коррекции фазы W, необходимую для корректировки ошибки (более конкретно, ошибки смещения) αw, включенной в сигнал Iw* обнаружения тока фазы W. Альтернативно, например, когда компонента напряжения с конкретной частотой является компонентой напряжения, имеющей частоту, равную удвоенной частоте командных сигналов трехфазного напряжения, блок 157w вычисления величины коррекции фазы W может вычислять величину Cw коррекции фазы W, необходимую для корректировки ошибки (более конкретно, ошибки усиления) αw, включенной в сигнал Iw* обнаружения тока фазы W.
[0143] Таким образом, во втором варианте осуществления, ECU 15 также может предпочтительно корректировать сигнал Iv* обнаружения тока фазы V и сигнал Iw* обнаружения тока фазы W, таким же способом как в первом варианте осуществления. В частности, во втором варианте осуществления, когда сигнал Iv* обнаружения тока фазы V включает в себя множество ошибок αv (например, вышеупомянутые ошибку смещения и ошибку усиления), ECU 15 может индивидуально корректировать каждую из множества ошибок αv. Подобным образом, когда сигнал Iw* обнаружения тока фазы W включает в себя множество ошибок αw (например, вышеупомянутые ошибку смещения и ошибку усиления), ECU 15 может индивидуально корректировать каждую из множества ошибок αw.
[0144] Третий вариант осуществления будет описываться ниже со ссылкой на фиг. 11. Фиг. 11 является блок-схемой, показывающей конфигурацию транспортного средства 3 третьего варианта осуществления. Так как составляющие элементы и операции в транспортном средстве 3 третьего варианта осуществления являются такими же, как составляющие элементы и операции в транспортном средстве 1 первого варианта осуществления и транспортном средстве 2 второго варианта осуществления, им назначены такие же ссылочные позиции и ссылочные позиции этапов и их подробное описание здесь пропускается.
[0145] Как показано на фиг. 11, транспортное средство 3 третьего варианта осуществления отличается от транспортного средства 1 первого варианта осуществления в том, что дополнительно обеспечивается преобразователь 31 увеличения напряжения, который является конкретным примером "преобразователя напряжения". Другие составляющие элементы транспортного средства 3 третьего варианта осуществления являются такими же, как другие составляющие элементы транспортного средства 1 первого варианта осуществления.
[0146] Преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения для поднятия значения напряжения энергии DC, обеспечиваемой от источника 11 энергии DC, до требуемого значения напряжения. Значение напряжения после операции увеличения напряжения, выполняемой посредством преобразователя 31 увеличения напряжения, соответствует напряжению VH на зажимах сглаживающего конденсатора 12. Поэтому, преобразователь 31 увеличения напряжения обычно выполняет операцию увеличения напряжения, чтобы сигнал VH* обнаружения напряжения на зажимах, выводимый из датчика 12v напряжения, соответствовал требуемому значению напряжения.
[0147] Однако, когда преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения, чтобы сигнал VH* обнаружения напряжения на зажимах соответствовал требуемому значению напряжения, сигнал VH* обнаружения напряжения на зажимах не изменяется, даже когда ошибка αv включается в сигнал Iv* обнаружения тока фазы V. Поэтому, даже когда ошибка αv включается в сигнал Iv* обнаружения тока фазы V, является трудным для ECU 15 корректировать ошибку αv на основе сигнала VH* обнаружения напряжения на зажимах.
[0148] Подобным образом, когда преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения, чтобы сигнал VH* обнаружения напряжения на зажимах соответствовал требуемому значению напряжения, сигнал VH* обнаружения напряжения на зажимах не изменяется, даже когда ошибка αw включается в сигнал Iw* обнаружения тока фазы W. Поэтому, даже когда ошибка αw включается в сигнал Iw* обнаружения тока фазы W, является трудным для ECU 15 корректировать ошибку αw на основе сигнала VH* обнаружения напряжения на зажимах.
[0149] Соответственно, в третьем варианте осуществления, преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения, чтобы компонента напряжения, полученная посредством удаления компоненты изменения напряжения VH на зажимах, которая вызывается ошибкой αv и ошибкой αw, из сигнала VH* обнаружения напряжения на зажимах, соответствовала требуемому значению напряжения. Например, преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения, чтобы компонента напряжения, полученная посредством удаления как компоненты напряжения, имеющей частоту такую же, как частота командных сигналов трехфазного напряжения, (то есть, компоненты изменения напряжения VH на зажимах, которая вызывается посредством ошибки смещения), так и компоненты напряжения, имеющей частоту, равную удвоенной частоте командных сигналов трехфазного напряжения, (то есть, компоненты изменения напряжения VH на зажимах, которая вызывается посредством ошибки усиления) из сигнала VH* обнаружения напряжения на зажимах, соответствовала требуемому значению напряжения. Операция удаления компоненты изменения напряжения VH на зажимах, которая вызывается ошибкой αv и ошибкой αw, из сигнала VH* обнаружения напряжения на зажимах, может выполняться, например, посредством режекторного фильтра (или фильтра устранения диапазона (BEF)).
[0150] Как результат, даже когда преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения в таком режиме, когда ошибка αv включается в сигнал Iv* обнаружения тока фазы V, сигнал VH* обнаружения напряжения на зажимах изменяется. Поэтому, ECU 15 может корректировать сигнал Iv* обнаружения тока фазы V на основе сигнала VH* обнаружения напряжения на зажимах, даже когда преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения.
[0151] Подобным образом, даже когда преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения в таком режиме, когда ошибка αw включается в сигнал Iw* обнаружения тока фазы W, сигнал VH* обнаружения напряжения на зажимах изменяется. Поэтому, ECU 15 может корректировать сигнал Iw* обнаружения тока фазы W на основе сигнала VH* обнаружения напряжения на зажимах, даже когда преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения.
[0152] Таким образом, также в третьем варианте осуществления, аналогично первому варианту осуществления, ECU 15 может предпочтительно корректировать сигнал Iv* обнаружения тока фазы V и сигнал Iw* обнаружения тока фазы W. В частности, в третьем варианте осуществления, ECU 15 может предпочтительно корректировать сигнал Iv* обнаружения тока фазы V и сигнал Iw* обнаружения тока фазы W, даже когда транспортное средство 3 обеспечено преобразователем 31 увеличения напряжения.
[0153] Четвертый вариант осуществления будет описываться ниже со ссылкой на фиг. 12. Фиг. 12 является блок-схемой, показывающей конфигурацию транспортного средства 4 четвертого варианта осуществления. Так как составляющие элементы и операции в транспортном средстве 4 четвертого варианта осуществления являются такими же, как составляющие элементы и операции в транспортном средстве 1 первого варианта осуществления по транспортное средство 3 третьего варианта осуществления, им назначены такие же ссылочные позиции и ссылочные позиции этапов и их подробное описание здесь пропускается.
[0154] Как показано на фиг. 12, транспортное средство 4 четвертого варианта осуществления отличается от транспортного средства 1 первого варианта осуществления в том, что дополнительно обеспечивается преобразователь 31 увеличения напряжения, который является конкретным примером "преобразователя энергии". Дополнительно, транспортное средство 4 четвертого варианта осуществления также отличается от транспортного средства 1 первого варианта осуществления в том, что дополнительно обеспечивается датчик 41 тока источника энергии. Другие составляющие элементы транспортного средства 4 четвертого варианта осуществления являются такими же, как другие составляющие элементы транспортного средства 1 первого варианта осуществления.
[0155] Преобразователь 31 увеличения напряжения является идентичным преобразователю 31 увеличения напряжения, обеспеченному в транспортном средстве 3 третьего варианта осуществления. Как описано выше, преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения, чтобы сигнал VH* обнаружения напряжения на зажимах, выводимый из датчика 12v напряжения, соответствовал требуемому значению напряжения.
[0156] Датчик 41 тока источника энергии обнаруживает ток IL источника энергии, текущий от источника 11 энергии DC в преобразователь 31 увеличения напряжения (другими словами, от источника 11 энергии DC через преобразователь 31 увеличения напряжения в инвертор 13). Сигнал обнаружения датчика 41 тока источника энергии (называемый ниже, как надлежит, "сигнал IL* обнаружения тока источника энергии") используется, как надлежит, блоком ECU 15.
[0157] В этом случае, как упомянуто выше, когда преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения, чтобы сигнал VH* обнаружения напряжения на зажимах соответствовал требуемому значению напряжения, сигнал VH* обнаружения напряжения на зажимах не изменяется, даже когда ошибка αv включается в сигнал Iv* обнаружения тока фазы V. Поэтому, даже когда ошибка αv включается в сигнал Iv* обнаружения тока фазы V, является трудным для ECU 15 корректировать ошибку αv на основе сигнала VH* обнаружения напряжения на зажимах. То же является верным по отношению к ошибке αw, включенной в сигнал Iw* обнаружения тока фазы W.
[0158] Между тем, напряжение VH на зажимах сглаживающего конденсатора 12 включает в себя как компоненту изменения (компоненту напряжения), вызванную операцией увеличения напряжения, выполняемой посредством преобразователя 31 увеличения напряжения, так и компоненту изменения (компоненту напряжения) напряжения VH на зажимах, вызванную ошибкой αv и ошибкой αw. Поэтому, компонента напряжения, полученная посредством удаления компоненты изменения, вызванной операцией увеличения напряжения, выполняемой посредством преобразователя 31 увеличения напряжения, из сигнала VH* обнаружения напряжения на зажимах, по существу, соответствует компоненте изменения напряжения VH на зажимах, вызванной ошибкой αv и ошибкой αw. Поэтому, даже когда преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения, когда ошибка αv включается в сигнал Iv* обнаружения тока фазы V, компонента напряжения, полученная посредством удаления компоненты изменения, вызванной операцией увеличения напряжения, выполняемой посредством преобразователя 31 увеличения напряжения, из сигнала VH* обнаружения напряжения на зажимах, изменяется. Подобным образом, даже когда преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения, когда ошибка αw включается в сигнал Iw* обнаружения тока фазы W, компонента напряжения, полученная посредством удаления компоненты изменения, вызванной операцией увеличения напряжения, выполняемой посредством преобразователя 31 увеличения напряжения, из сигнала VH* обнаружения напряжения на зажимах, изменяется.
[0159] Соответственно, в четвертом варианте осуществления, ECU 15 (более конкретно, блок 157v обнаружения величины коррекции фазы V, обеспеченный в ECU 15) вычисляет величину Cv коррекции фазы V для корректировки сигнала Iv* обнаружения тока фазы V, чтобы величина увеличения/уменьшения компоненты напряжения, полученной посредством удаления компоненты изменения, вызванной операцией увеличения напряжения, выполняемой посредством преобразователя 31 увеличения напряжения, из сигнала VH* обнаружения напряжения на зажимах, вместо величины увеличения/уменьшения сигнала VH* обнаружения напряжения на зажимах, становилась нулевой. Как результат, ECU 15 может корректировать сигнал Iv* обнаружения тока фазы V, чтобы устранять ошибку αv, даже когда преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения.
[0160] Подобным образом, ECU 15 (более конкретно, блок 157w обнаружения величины коррекции фазы W, обеспеченный в ECU 15), вычисляет величину Cw коррекции фазы W для корректировки сигнала Iw* обнаружения тока фазы W, чтобы величина увеличения/уменьшения компоненты напряжения, полученной посредством удаления компоненты изменения, вызванной операцией увеличения напряжения, выполняемой посредством преобразователя 31 увеличения напряжения, из сигнала VH* обнаружения напряжения на зажимах, вместо величины увеличения/уменьшения сигнала VH* обнаружения напряжения на зажимах, становилась нулевой. Как результат, ECU 15 может корректировать сигнал Iw* обнаружения тока фазы W, чтобы устранять ошибку αw, даже когда преобразователь 31 увеличения напряжения выполняет операцию увеличения напряжения.
[0161] ECU 15 может вычислять компоненту изменения, вызванную операцией увеличения напряжения, выполняемой посредством преобразователя 31 увеличения напряжения, посредством интегрирования сигнала IL* обнаружения тока источника энергии, который является сигналом обнаружения датчика 41 тока, и деления интегрированного сигнала IL* обнаружения тока источника энергии на электростатическую емкость сглаживающего конденсатора. Другими словами, компонента напряжения, полученная посредством деления интегрированного сигнала IL* обнаружения тока источника энергии на электростатическую емкость сглаживающего конденсатора, соответствует компоненте изменения, вызванной операцией увеличения напряжения, выполняемой посредством преобразователя 31 увеличения напряжения. Однако ECU 15 также может вычислять компоненту изменения, вызванную операцией увеличения напряжения, выполняемой посредством преобразователя 31 увеличения напряжения, посредством других режимов.
[0162] Таким образом, в четвертом варианте осуществления, ECU 15 может предпочтительно корректировать сигнал Iv* обнаружения тока фазы V и сигнал Iw* обнаружения тока фазы W таким же способом как в первом варианте осуществления. В частности, в четвертом варианте осуществления, ECU 15 может предпочтительно корректировать сигнал Iv* обнаружения тока фазы V и сигнал Iw* обнаружения тока фазы W, даже когда транспортное средство 4 обеспечено преобразователем 31 увеличения напряжения.
[0163] Пятый вариант осуществления будет описываться ниже со ссылкой на фиг. 13 и 14. Фиг. 13 является блок-схемой, показывающей конфигурацию транспортного средства 5 пятого варианта осуществления. Фиг. 14 является блок-схемой, показывающей конфигурацию блока ECU 55 пятого варианта осуществления (в частности, конфигурацию для управления работой инвертора 13). Так как составляющие элементы и операции в транспортном средстве 5 пятого варианта осуществления являются такими же, как составляющие элементы и операции в транспортном средстве 1 первого варианта осуществления по транспортное средство 4 четвертого варианта осуществления, им назначены такие же ссылочные позиции и ссылочные позиции этапов и их подробное описание здесь пропускается.
[0164] Как показано на фиг. 13, транспортное средство 5 пятого варианта осуществления отличается от транспортного средства 1 первого варианта осуществления в том, что дополнительно обеспечивается датчик 51 тока конденсатора, который обнаруживает ток Ic конденсатора. Дополнительно, транспортное средство 5 пятого варианта осуществления также отличается от транспортного средства 1 первого варианта осуществления в том, что датчик 12v напряжения, который обнаруживает напряжение VH на зажимах, может не обеспечиваться. Транспортное средство 5 пятого варианта осуществления также отличается от транспортного средства 1 первого варианта осуществления в том, что ECU 55 ссылается на сигнал обнаружения датчика 51 тока конденсатора (называемый ниже, как надлежит, "сигнал Ic* обнаружения тока конденсатора"), вместо сигнала VH* обнаружения напряжения на зажимах. Другие составляющие элементы транспортного средства 5 пятого варианта осуществления являются такими же, как другие составляющие элементы транспортного средства 1 первого варианта осуществления.
[0165] Как показано на фиг. 14, ECU 55 пятого варианта осуществления отличается от ECU 15 первого варианта осуществления, в котором блок 157v вычисления величины коррекции фазы V и блок 157w вычисления величины коррекции фазы W ссылаются на сигнал VH* обнаружения напряжения на зажимах, в том, что блок 557v вычисления величины коррекции фазы V и блок 557w вычисления величины коррекции фазы W соответственно ссылаются на сигнал Ic* обнаружения тока конденсатора. Другие составляющие элементы блока ECU 55 пятого варианта осуществления являются такими же, как другие составляющие элементы блока ECU 15 первого варианта осуществления.
[0166] Блок 557v вычисления величины коррекции фазы V вычисляет величину Cv коррекции фазы V на основе сигнала Ic* обнаружения тока конденсатора, который должен вводиться в блок 557v вычисления величины коррекции фазы V, в пределах периода времени, в котором фаза тока конденсатора определяется как фаза V. Более конкретно, выше указано, что когда ошибка αv включается в сигнал Iv* обнаружения тока фазы V, ошибка αv может вызывать увеличение/уменьшение сигнала Ic* обнаружения тока конденсатора (см. фиг. 5A и 5B). Поэтому, в пятом варианте осуществления, блок 557v вычисления величины коррекции фазы V может вычислять величину Cv коррекции фазы V, чтобы сигнал Ic* обнаружения тока конденсатора в пределах периода времени, в котором фаза тока конденсатора определяется как фаза V, изменялся в одном и том же режиме в некоторых или всех из множества периодов времени, в которых фаза тока конденсатора определяется как фаза V. Другими словами, блок 557v вычисления величины коррекции фазы V может вычислять величину Cv коррекции фазы V, чтобы сигнал Ic* обнаружения тока конденсатора в пределах периода времени, в котором фаза тока конденсатора определяется как фаза V, соответствовал требуемому значению тока.
[0167] Например, когда фаза V определяется как фаза тока конденсатора, блок 557v вычисления величины коррекции фазы V может сравнивать сигнал Ic* обнаружения тока конденсатора, который должен вводиться в блок 557v вычисления величины коррекции фазы V в пределах текущего периода времени, в котором фаза V определяется как фаза тока конденсатора, (упоминаемый ниже как "текущий сигнал Ic* обнаружения тока конденсатора") с сигналом Ic* обнаружения тока конденсатора, который должен вводиться в блок 557v вычисления величины коррекции фазы V в пределах предыдущего периода времени, в котором фаза V была определена как фаза тока конденсатора (упоминаемым ниже как "предыдущий сигнал Ic* обнаружения тока конденсатора"). Затем, блок 557v вычисления величины коррекции фазы V может вычислять величину Cv коррекции фазы V, чтобы текущий сигнал Ic* обнаружения тока конденсатора становился равным предыдущему сигналу Ic* обнаружения тока конденсатора. В этом случае, блок 557v вычисления величины коррекции фазы V может вычислять величину Cv коррекции фазы V, без выполнения, например, управления PI.
[0168] Подобным образом, блок 557w вычисления величины коррекции фазы W вычисляет величину Cw коррекции фазы W на основе сигнала Ic* обнаружения тока конденсатора, который должен вводиться в блок 557w вычисления величины коррекции фазы W, в пределах периода времени, в котором фаза тока конденсатора определяется как фаза W. Другими словами, блок 557w вычисления величины коррекции фазы W может вычислять величину Cw коррекции фазы W, чтобы сигнал Ic* обнаружения тока конденсатора в пределах периода времени, в котором фаза тока конденсатора определяется как фаза W, изменялся в одном и том же режиме в некоторых или всех из множества периодов времени, в которых фаза тока конденсатора определяется как фаза W. Другими словами, блок 557w вычисления величины коррекции фазы W может вычислять величину Cw коррекции фазы W, чтобы сигнал Ic* обнаружения тока конденсатора в пределах периода времени, в котором фаза тока конденсатора определяется как фаза W, соответствовал требуемому значению тока.
[0169] Например, когда фаза W определяется как фаза тока конденсатора, блок 557w вычисления величины коррекции фазы W может сравнивать сигнал Ic* обнаружения тока конденсатора, который должен вводиться в блок 557w вычисления величины коррекции фазы W в пределах текущего периода времени, в котором фаза W определяется как фаза тока конденсатора, (упоминаемый ниже как "текущий сигнал Ic* обнаружения тока конденсатора") с сигналом Ic* обнаружения тока конденсатора, который вводится в блок 557w вычисления величины коррекции фазы W в пределах предыдущего периода времени, в котором фаза W была определена как фаза тока конденсатора (упоминаемым ниже как "предыдущий сигнал Ic* обнаружения тока конденсатора"). Затем, блок 557w вычисления величины коррекции фазы W может вычислять величину Cw коррекции фазы W, чтобы текущий сигнал Ic* обнаружения тока конденсатора становился равным предыдущему сигналу Ic* обнаружения тока конденсатора. В этом случае, блок 557w вычисления величины коррекции фазы W может вычислять величину Cw коррекции фазы W, без выполнения, например, управления PI.
[0170] Таким образом, в пятом варианте осуществления, ECU 15 может предпочтительно корректировать сигнал Iv* обнаружения тока фазы V и сигнал Iw* обнаружения тока фазы W, таким же способом как в первом варианте осуществления. В частности, в пятом варианте осуществления, так как ECU 15 ссылается на сигнал Ic* обнаружения тока конденсатора вместо сигнала VH* обнаружения напряжения на зажимах, не является необходимым выполнять управление PI при вычислении величины Cv коррекции фазы V и величины Cw коррекции фазы W. Поэтому, сигнал Iv* обнаружения тока фазы V и сигнал Iw* обнаружения тока фазы W могут корректироваться более быстро.
[0171] Изобретение не ограничено вышеописанными вариантами осуществления и может изменяться, как надлежит, без отклонения от существа или сущности изобретения, изложенных в формуле изобретения и всем описании, и контроллер двигателя, включающий в себя такие изменения, также включается в технический объем изобретения.

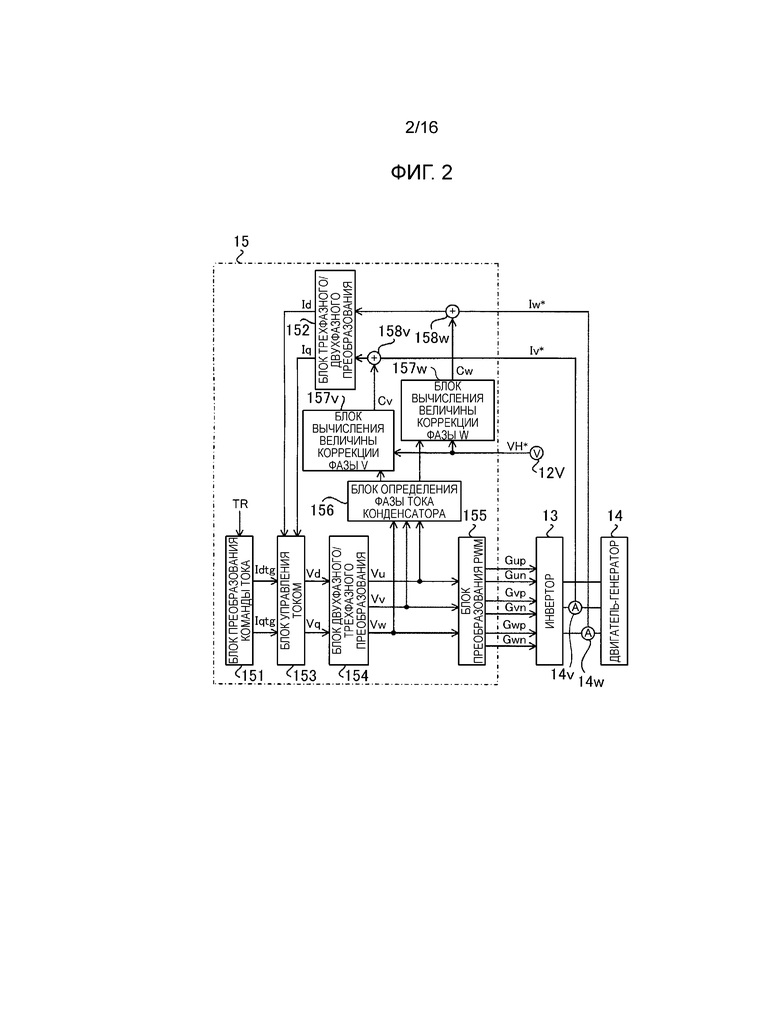
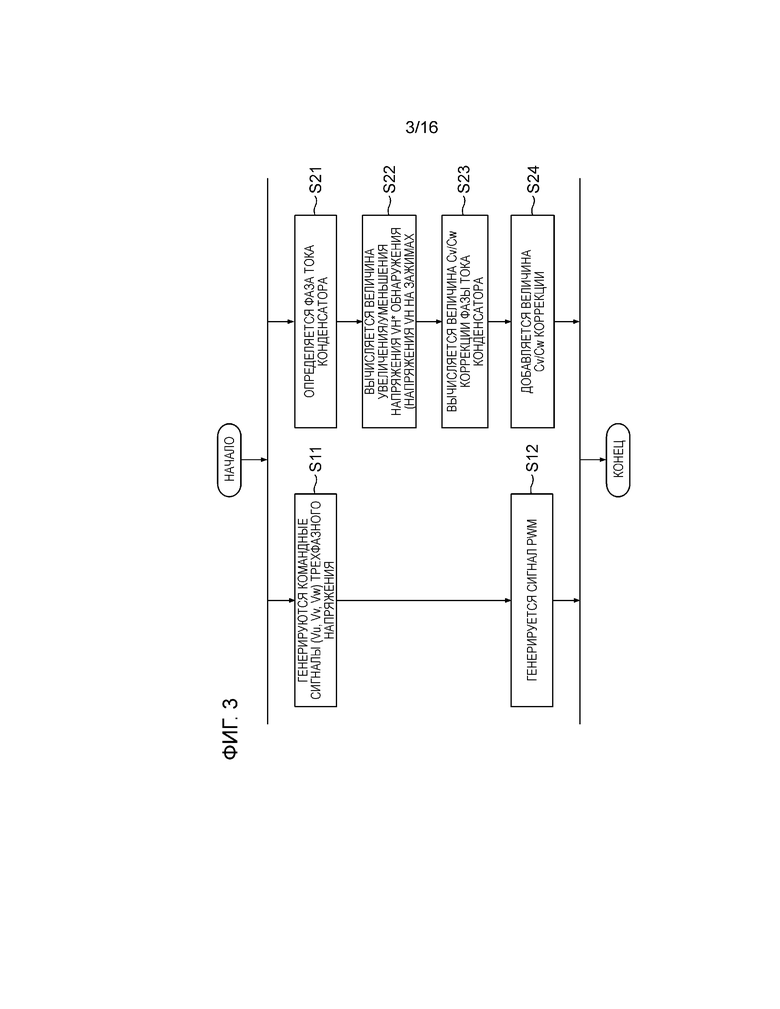
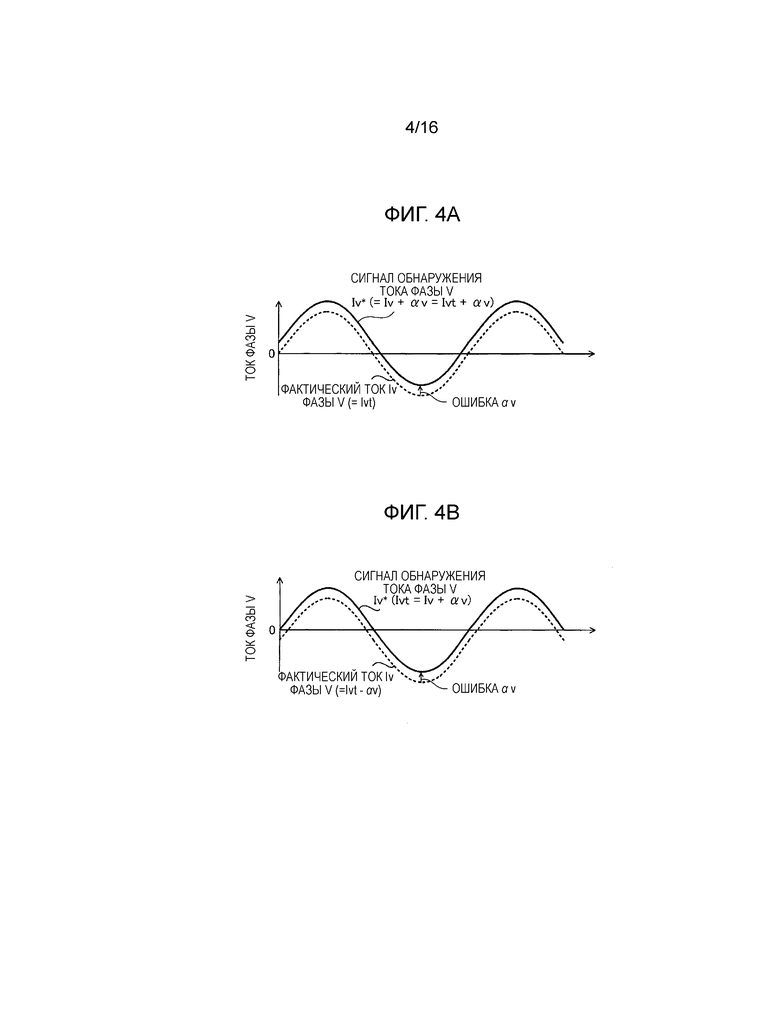
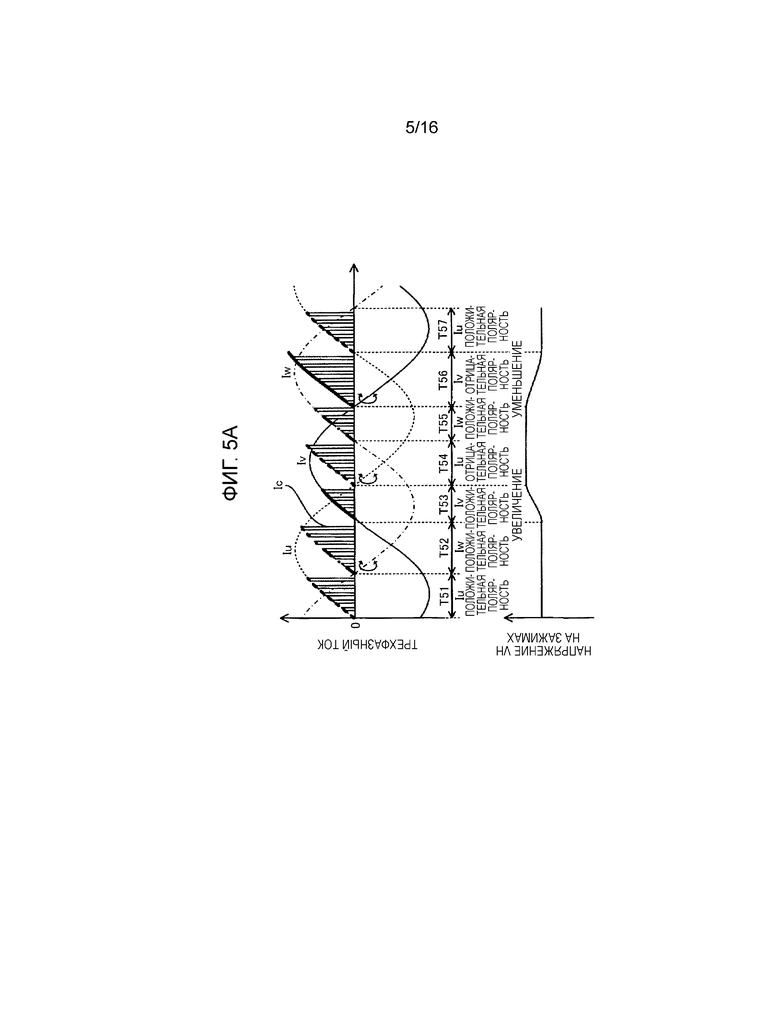
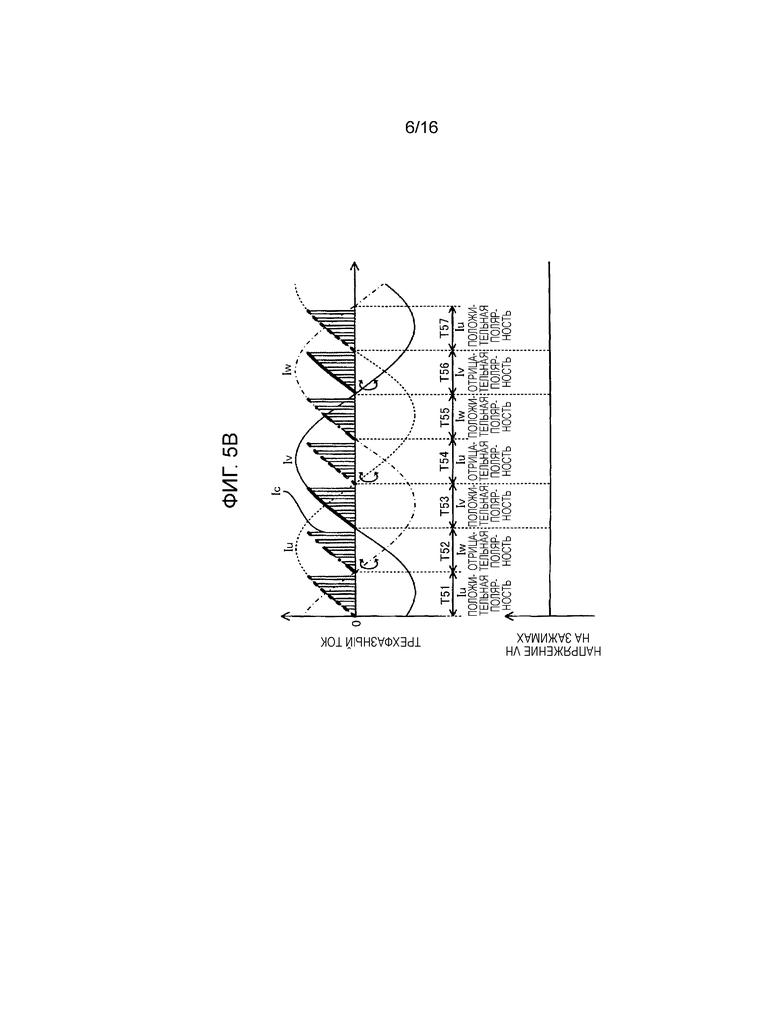
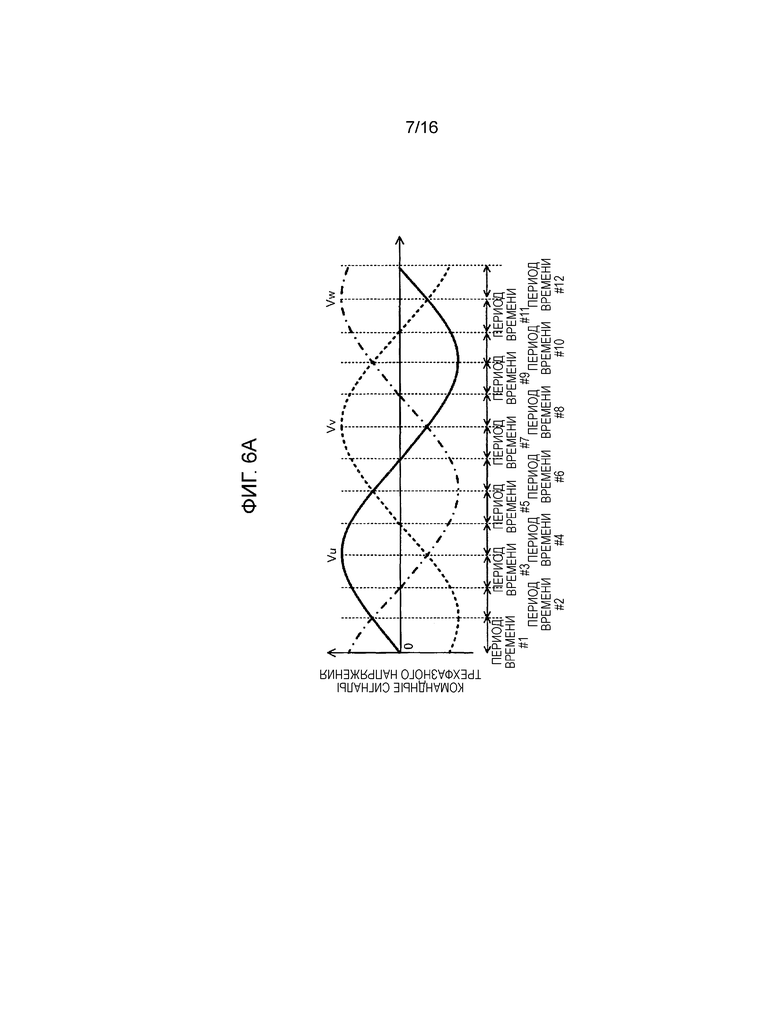
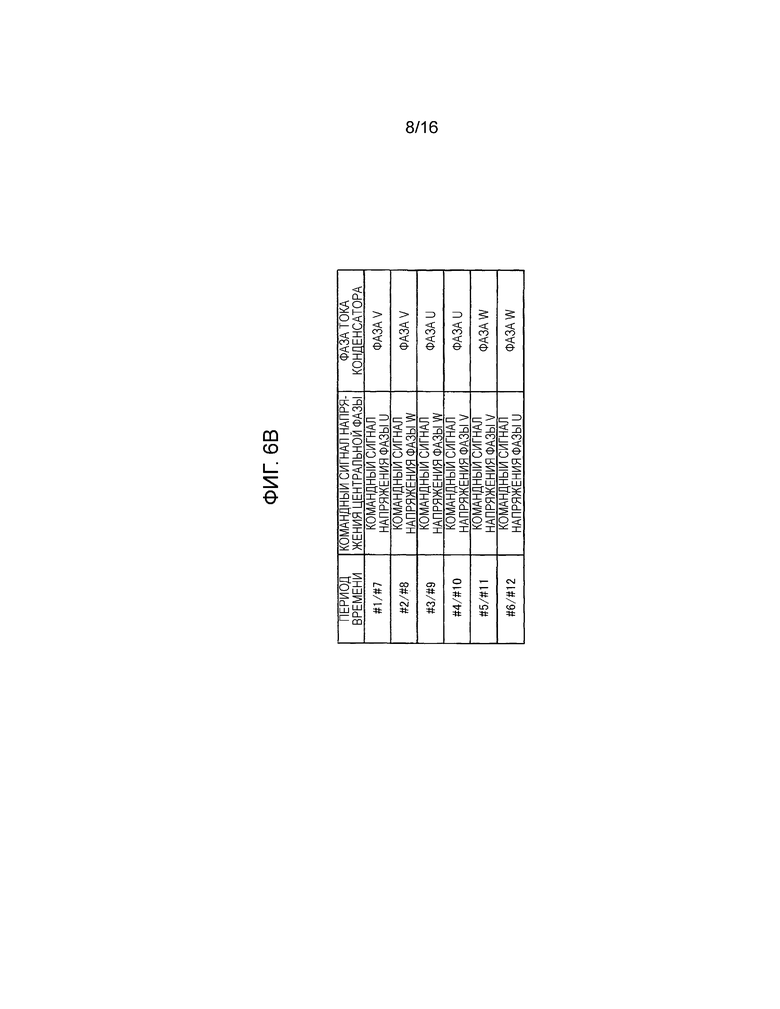
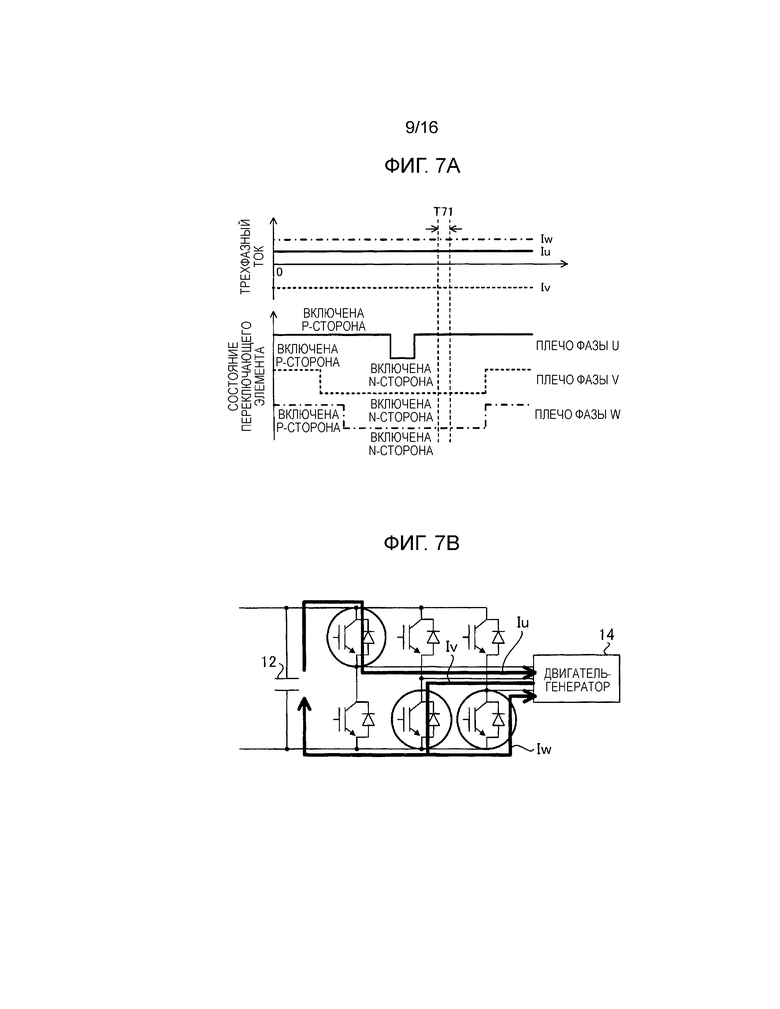
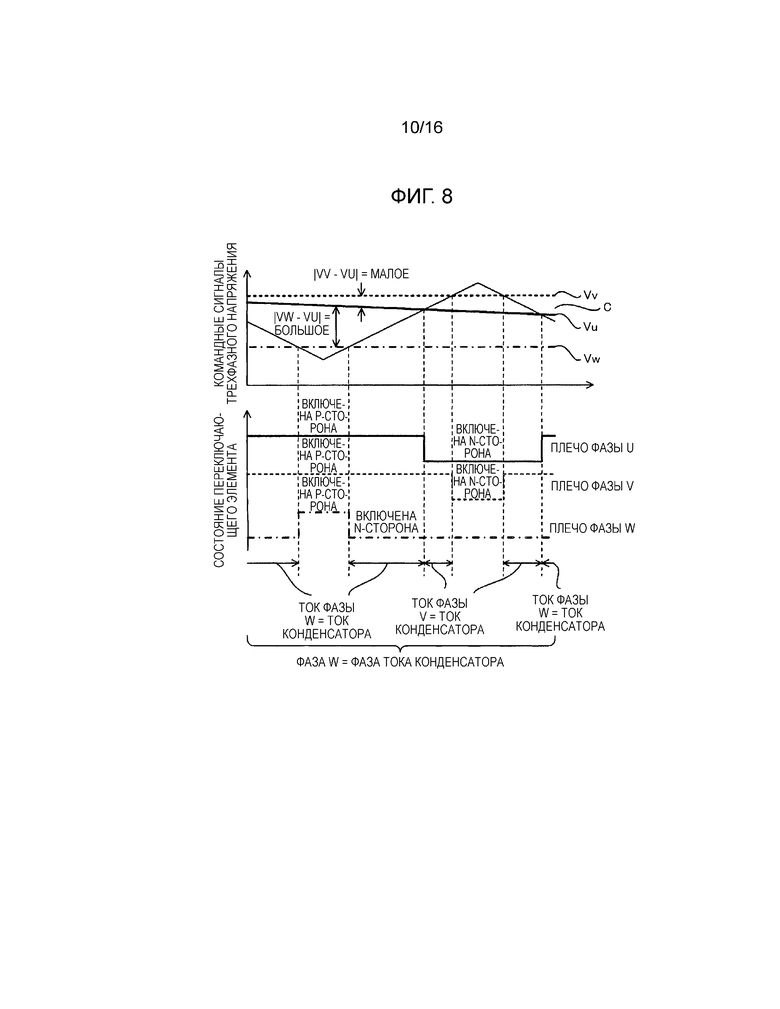
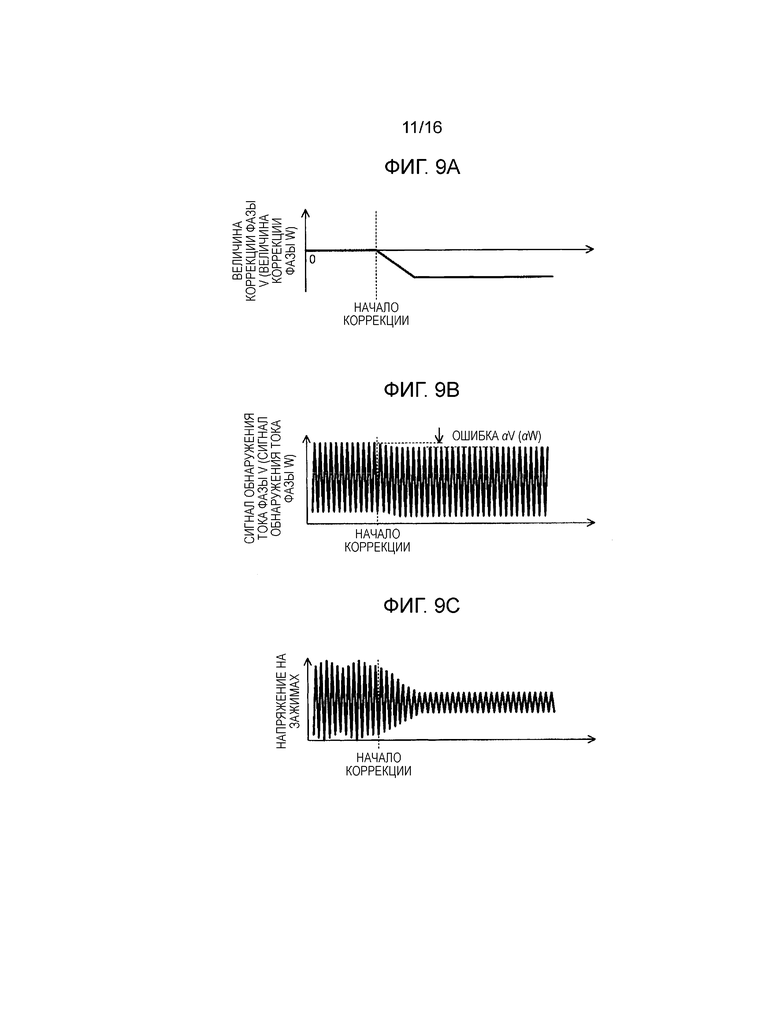

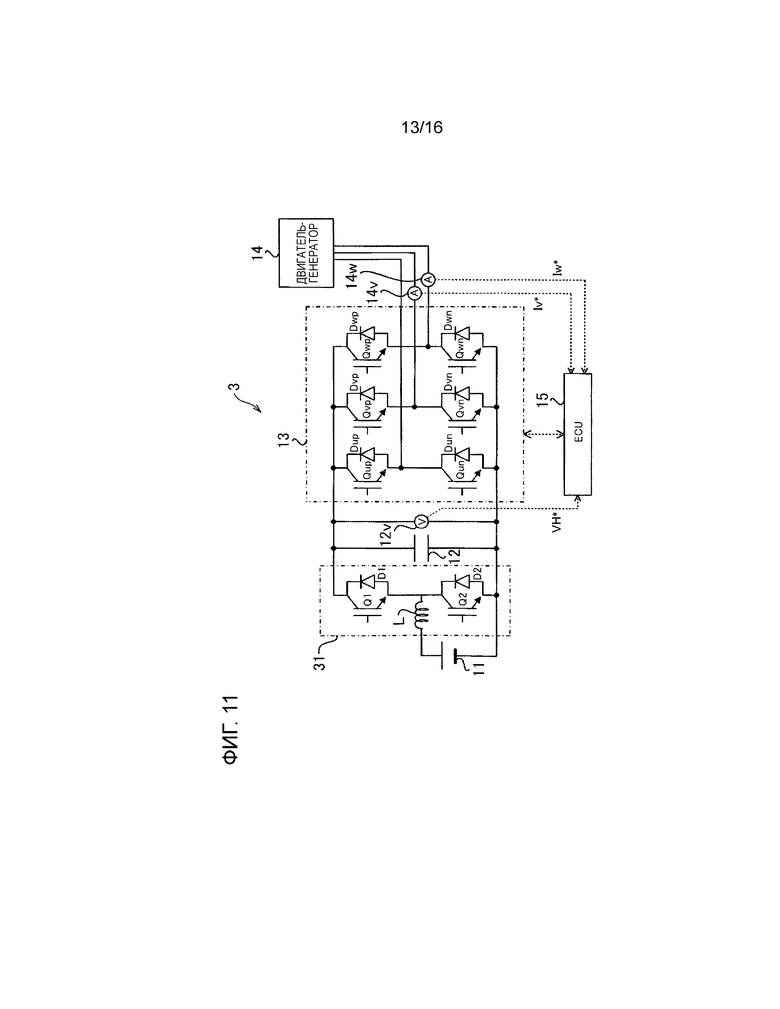

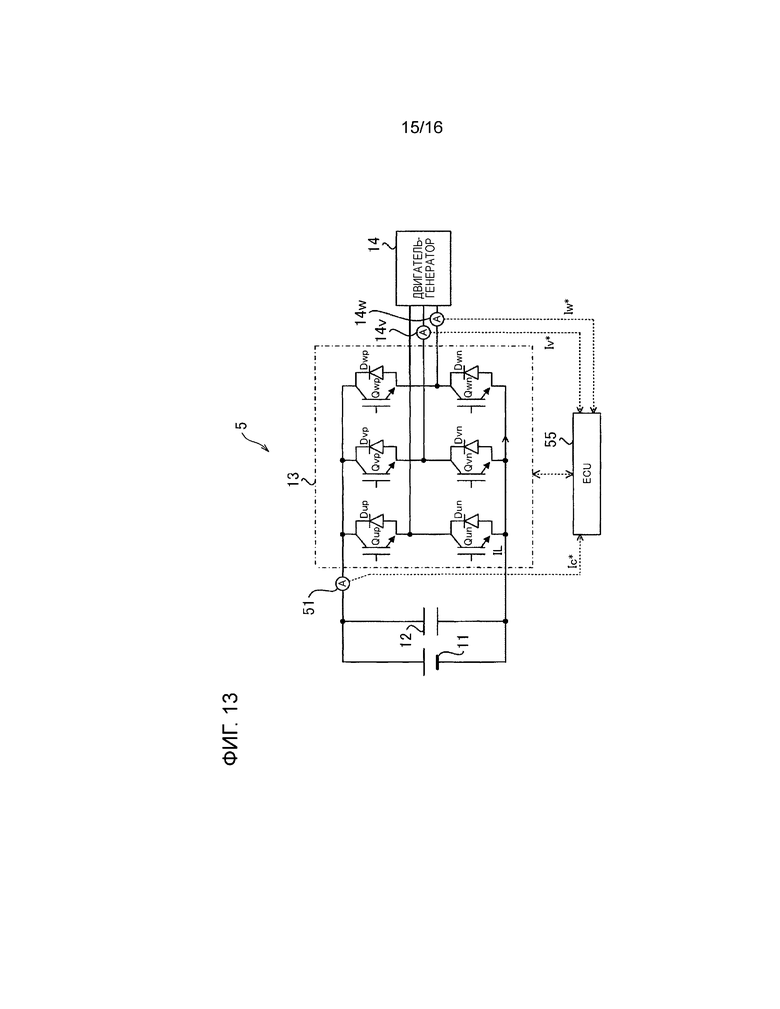
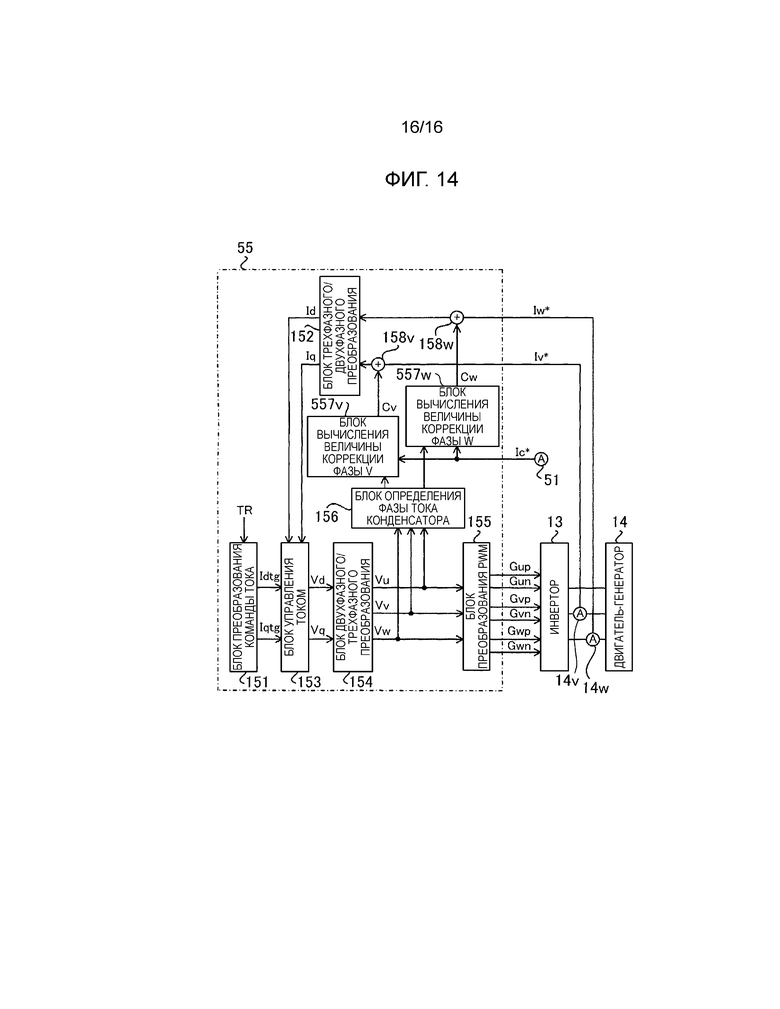
Изобретение относится к области электротехники и может быть использовано для управления двигательной системой, включающей в себя: преобразователь (13) энергии, сглаживающий конденсатор (12), трехфазный AC двигатель (14) и датчик (14v, 14w) тока. Контроллер двигателя обеспечен электронным блоком (15) управления. Электронный блок управления определяет целевую фазу (156), которая является фазой второго командного сигнала фазного напряжения, имеющего наибольшее отличие от первого командного сигнала фазного напряжения, имеющего уровень сигнала, который не является ни максимальным, ни минимальным уровнем сигнала, на основе командных сигналов трехфазного напряжения (Vu, Vv, Vw), генерируемых из значения (Iv*, Iw*) обнаружения датчика тока, и корректирует значение (157v, 157w, 158v, 158w) обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы напряжение на зажимах (VH) сглаживающего конденсатора соответствовало требуемому значению напряжения. 14 з.п. ф-лы, 20 ил.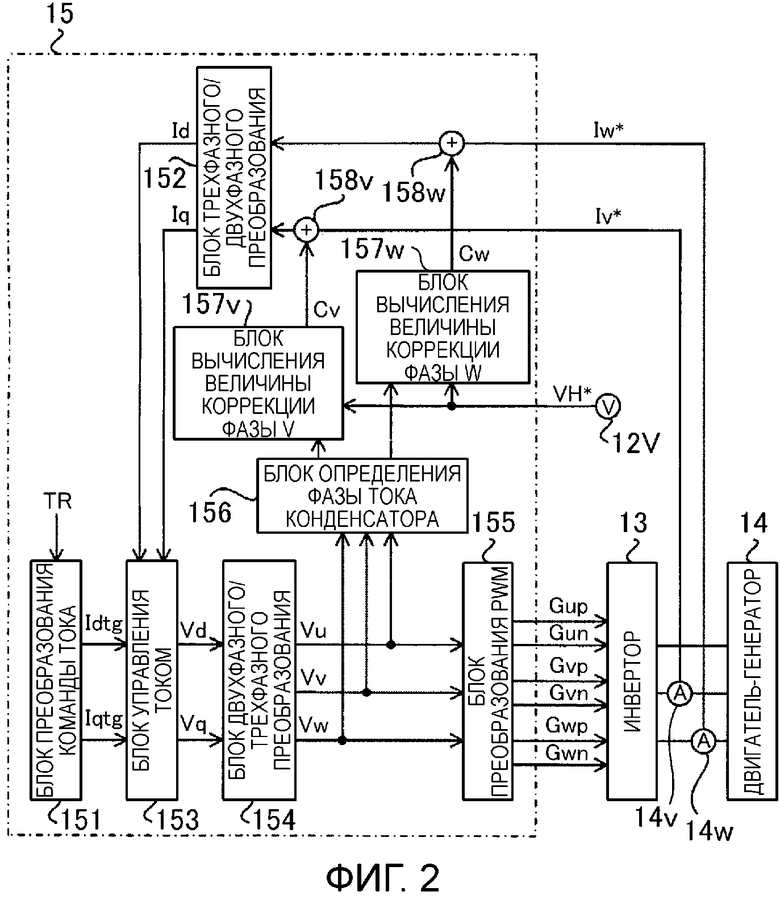
1. Контроллер двигателя для управления двигательной системой, при этом двигательная система включает в себя:
источник энергии постоянного тока;
преобразователь энергии, выполненный с возможностью преобразовывать энергию постоянного тока, обеспечиваемую от источника энергии постоянного тока, в энергию переменного тока;
сглаживающий конденсатор, соединенный электрически параллельно с преобразователем энергии;
трехфазный двигатель переменного тока, который возбуждается посредством использования энергии переменного тока, выводимой из преобразователя энергии; и
датчик тока, который обнаруживает фазный ток, обеспечиваемый в трехфазный двигатель переменного тока,
причем контроллер двигателя содержит:
электронный блок управления, выполненный с возможностью:
(a) определять целевую фазу, которая является фазой второго командного сигнала фазного напряжения, имеющего наибольшее отличие от первого командного сигнала фазного напряжения, имеющего уровень сигнала, который не является ни максимальным, ни минимальным уровнем сигнала, на основе командных сигналов трехфазного напряжения, генерируемых из значения обнаружения датчика тока, при этом командные сигналы трехфазного напряжения регулируют работу трехфазного двигателя переменного тока; и
(b) корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы напряжение на зажимах сглаживающего конденсатора соответствовало требуемому значению напряжения.
2. Контроллер двигателя по п. 1, в котором
электронный блок управления выполнен с возможностью определять режим корректировки значения обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, на основе (i) полярности фазного тока целевой фазы и (ii) тенденции изменения напряжения на зажимах.
3. Контроллер двигателя по п. 2, в котором
электронный блок управления выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, в первом режиме коррекции, когда полярность фазного тока целевой фазы является первой полярностью и напряжение на зажимах изменяется в первом режиме изменения; и
электронный блок управления выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, во втором режиме коррекции, который отличается от первого режима коррекции, когда полярность фазного тока целевой фазы является второй полярностью, которая отличается от первой полярности, и напряжение на зажимах изменяется в первом режиме изменения.
4. Контроллер двигателя по п. 3, в котором
первая полярность является какой-либо из положительной полярности и отрицательной полярности,
вторая полярность отличается от первой полярности среди положительной полярности и отрицательной полярности,
первый режим изменения является каким-либо из режима изменения, в котором напряжение на зажимах уменьшается, и режима изменения, в котором напряжение на зажимах увеличивается,
первый режим коррекции является каким-либо из режима коррекции, в котором значение обнаружения увеличивается, и режима коррекции, в котором значение обнаружения уменьшается, и
второй режим коррекции является режимом коррекции, который отличается от первого режима коррекции, среди режима коррекции, в котором значение обнаружения увеличивается, и режима коррекции, в котором значение обнаружения уменьшается.
5. Контроллер двигателя по любому из пп. 2-4, в котором
электронный блок управления выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, в первом режиме коррекции, когда полярность фазного тока целевой фазы является первой полярностью и напряжение на зажимах изменяется в первом режиме изменения, и
электронный блок управления выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, во втором режиме коррекции, который отличается от первого режима коррекции, когда полярность фазного тока целевой фазы является первой полярностью и напряжение на зажимах изменяется во втором режиме изменения, который отличается от первого режима изменения.
6. Контроллер двигателя по п. 5, в котором
первая полярность является какой-либо из положительной полярности и отрицательной полярности,
первый режим изменения является каким-либо из режима изменения, в котором напряжение на зажимах уменьшается, и режима изменения, в котором напряжение на зажимах увеличивается,
второй режим изменения является режимом изменения, который отличается от первого режима изменения, среди режима изменения, в котором напряжение на зажимах уменьшается, и режима изменения, в котором напряжение на зажимах увеличивается,
первый режим коррекции является каким-либо из режима коррекции, в котором значение обнаружения увеличивается, и режима коррекции, в котором значение обнаружения уменьшается, и
второй режим коррекции является режимом коррекции, который отличается от первого режима коррекции, среди режима коррекции, в котором значение обнаружения увеличивается, и режима коррекции, в котором значение обнаружения уменьшается.
7. Контроллер двигателя по любому из пп. 2-4, в котором электронный блок управления выполнен с возможностью
корректировать и уменьшать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, когда полярность фазного тока целевой фазы является отрицательной полярностью и напряжение на зажимах уменьшается.
8. Контроллер двигателя по любому из пп. 2-4, в котором
электронный блок управления выполнен с возможностью корректировать и увеличивать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, когда полярность фазного тока целевой фазы является положительной полярностью и напряжение на зажимах уменьшается.
9. Контроллер двигателя по любому из пп. 2-4, в котором
электронный блок управления выполнен с возможностью корректировать и увеличивать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, когда полярность фазного тока целевой фазы является отрицательной полярностью и напряжение на зажимах увеличивается.
10. Контроллер двигателя по любому из пп. 2-4, в котором
электронный блок управления выполнен с возможностью корректировать и уменьшать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, когда полярность фазного тока целевой фазы является положительной полярностью и напряжение на зажимах увеличивается.
11. Контроллер двигателя по любому из пп. 1-4, причем
двигательная система дополнительно включает в себя датчик напряжения и устройство извлечения, причем датчик напряжения обнаруживает напряжение на зажимах, устройство извлечения выполнено с возможностью извлекать компоненту напряжения, имеющую частоту такую же, как частота командных сигналов фазного напряжения, из значения обнаружения датчика напряжения, и
электронный блок управления выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы значение напряжения компоненты напряжения, извлеченное посредством устройства извлечения, соответствовало требуемому значению напряжения.
12. Контроллер двигателя по любому из пп. 1-4, причем
двигательная система дополнительно включает в себя датчик напряжения и устройство извлечения, причем датчик напряжения обнаруживает напряжение на зажимах, и устройство извлечения выполнено с возможностью извлекать компоненту напряжения, имеющую частоту, которая равняется удвоенной частоте командных сигналов фазного напряжения, из значения обнаружения датчика напряжения, и
электронный блок управления выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы значение напряжения компоненты напряжения, извлеченное посредством устройства извлечения, соответствовало требуемому значению напряжения.
13. Контроллер двигателя по любому из пп. 1-4, причем
двигательная система дополнительно включает в себя датчик напряжения и преобразователь напряжения, причем датчик напряжения обнаруживает напряжение на зажимах, преобразователь напряжения выполнен с возможностью преобразовывать значение напряжения энергии постоянного тока, которая обеспечивается от источника энергии постоянного тока, чтобы значение напряжения соответствовало требуемому значению напряжения,
преобразователь энергии выполнен с возможностью преобразовывать энергию постоянного тока в энергию переменного тока, при этом значение напряжения, обеспечиваемое от преобразователя напряжения, преобразуется в энергию постоянного тока, и
электронный блок управления выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы компонента напряжения соответствовала требуемому значению напряжения, при этом компонента напряжения получается посредством удаления влияния изменения напряжения на зажимах, вызванного посредством операции преобразования значения напряжения, выполняемой посредством преобразователя напряжения, из значения обнаружения датчика напряжения.
14. Контроллер двигателя по любому из пп. 1-4, причем
двигательная система дополнительно включает в себя датчик напряжения и преобразователь напряжения, причем датчик напряжения обнаруживает напряжение на зажимах, преобразователь напряжения выполнен с возможностью преобразовывать значение напряжения энергии постоянного тока, обеспечиваемой от источника энергии постоянного тока, чтобы компонента напряжения соответствовала требуемому значению напряжения, при этом компонента напряжения получается посредством удаления из значения обнаружения датчика напряжения компоненты напряжения, имеющей частоту такую же, как частота командных сигналов фазного напряжения, и компоненты напряжения, имеющей частоту, равную удвоенной частоте командных сигналов фазного напряжения, и
преобразователь энергии выполнен с возможностью преобразовывать энергию постоянного тока в энергию переменного тока, при этом значение напряжения, обеспечиваемое от преобразователя напряжения, преобразуется в энергию постоянного тока.
15. Контроллер двигателя по любому из пп. 1-4, в котором электронный блок управления выполнен с возможностью корректировать значение обнаружения датчика тока, который обнаруживает фазный ток целевой фазы, чтобы ток конденсатора, текущий в сглаживающем конденсаторе, соответствовал требуемому значению тока.
| RU 2011152792 A, 27.06.2013 | |||
| RU 2132110 С1, 20.06.1999 | |||
| Раздвижные подъемные подмости для возведения труб | 1952 |
|
SU99911A1 |
| JP 2000023490 A, 21.01.2000 | |||
| JP 2009098091 A, 07.05.2009 | |||
| US 2009189555 A1, 30.07.2009 | |||
| US 8514600 B1, 20.08.2013. | |||

