Изобретение относится к области радиотехнических систем и может быть использовано, например, в системах наблюдения воздушного пространства, вторичной радиолокации и определения местоположения наземных источников радиоизлучения (ИРИ).
Известен способ определения местоположения источника радиоизлучения, передающего свои координаты в ответах на запросы вторичного обзорного радиолокатора в режиме расширенного сквиттера (1, п. 2.1 Вторичный обзорный радиолокатор, гл. 5 Более длительный самогенерируемый сигнал режима S - Приложение 10 к Конвенции о международной гражданской авиации «Авиационная электросвязь». Том IV «Системы наблюдения и предупреждения столкновений» - Международная организация гражданской авиации, 2007. - 318 с.), (2 - Doc 9871 AN/464 Технические положения, касающиеся услуг режима S и расширенного сквиттера - Международная организация гражданской авиации, 2008. - 245 с.), (3 - Doc 9684 AN/951 Руководство по вторичным обзорным радиолокационным системам - Международная организация гражданской авиации, 2004. - 257 с.). Он позволяет определить координаты воздушных и наземных объектов, оснащенных бортовыми ответчиками и подсистемами определения своего местоположения, например, навигационной аппаратуры потребителя (НАП) глобальной навигационной спутниковой системы (ГНСС).
Недостатком способа является недостоверность определения местоположения в случаях выдачи НАП ГНСС своих координат с неизвестным смещением, которое возникает вследствие преднамеренного воздействия на ее элементы злоумышленников.
Известен разностно-дальномерный (TDOA - time difference of arrival) способ определения местоположения источника радиоизлучения (4, с. 496 - Теоретическое основы радиолокации // под ред. Ширмана Я.Д. - М.: Советское радио, 1970. - 560 с.), (5 - Патент РФ №2204145, МПК: (2006.01) G01S 3/46. Разностно-дальномерный способ пеленгования источника радиоизлучения, Военный инженерно-космический университет. Сайбель А.Г. Публ. - 10.05.2003 г. ), (6 - Патент РФ №2521084, МПК: (2006.01) G01S 3/46. Разностно-дальномерный способ определения координат источника радиоизлучения, ООО НЛП «Новые Технологии Телекоммуникаций». Овчаренко Л.А., Панков А.В., Погорелов В.А., Потапов С.Г., Тимофеев С.С., Шуст М.П. Публ. - 27.06.2014 г.), (7 - Method and system for time difference of arrival location services // патент США № US 7339522 B2 от 4.03.2008, автор W. Kurt Dobson, патентообладатель S5 Wireless, Inc.), принятый за прототип. Он основан на измерении разностей расстояний от ИРИ до пар пунктов приема и реализуется в виде следующей последовательности действий: на N измерительных пунктах (ИП) с известными координатами принимают сигнал ИРИ, при этом N≥3, определяют задержки времени прихода сигналов на ИП для каждой пары ИП Δtnm,  ,
,  , m>n, по задержкам времени определяют разности расстояний между ИРИ и этими ИП для каждой пары ИП, для каждой найденной разности расстояний на основе известных координат измерительных пунктов формируют поверхности положения в виде гиперболоидов, оценку местоположения ИРИ формируют путем определения координат точки пересечения найденных поверхностей положения.
, m>n, по задержкам времени определяют разности расстояний между ИРИ и этими ИП для каждой пары ИП, для каждой найденной разности расстояний на основе известных координат измерительных пунктов формируют поверхности положения в виде гиперболоидов, оценку местоположения ИРИ формируют путем определения координат точки пересечения найденных поверхностей положения.
Способ-прототип позволяет определить местоположение ИРИ, передающего свои координаты с неизвестным смещением.
Недостатком способа-прототипа является техническая сложность его реализации, поскольку требуется применение не менее трех измерительных пунктов при определении местоположения подвижного ИРИ.
Задачей изобретения является упрощение реализации за счет уменьшения числа минимально необходимых измерительных пунктов до двух при использовании информации о передаваемых ИРИ координатах с неизвестным смещением.
Для решения поставленной задачи предлагается способ определения местоположения подвижного источника радиоизлучения, передающего свои координаты с неизвестным смещением, двухпозиционной системой с высокодинамичным ИП, при котором на N измерительных пунктах с известными координатами принимают сигнал источника радиоизлучения, определяют задержки времени прихода сигналов на ИП, по задержкам времени определяют разности расстояний между источником радиоизлучения и этими ИП, для каждой найденной разности расстояний на основе известных координат ИП формируют поверхности положения в виде гиперболоидов.
Согласно изобретению, дополнительно последовательно принимают сигнал источника радиоизлучения, содержащий информацию о его положении в моменты времени ti,  , I≥2, при этом N=2, а один из измерительных пунктов является высокодинамичным по отношению к источнику радиоизлучения, декодируют принятые сигналы и запоминают полученные координаты ςИРИ(ti), задержки времени Δti и разности расстояний Δsi определяют для каждого момента времени ti,
, I≥2, при этом N=2, а один из измерительных пунктов является высокодинамичным по отношению к источнику радиоизлучения, декодируют принятые сигналы и запоминают полученные координаты ςИРИ(ti), задержки времени Δti и разности расстояний Δsi определяют для каждого момента времени ti,  , I≥2, определяют последовательность векторов
, I≥2, определяют последовательность векторов  ,
,  между точками пространства с полученными координатами, ςИРИ(ti),
между точками пространства с полученными координатами, ςИРИ(ti),  , после формирования поверхностей положения определяют оценку местоположения ИРИ в моменты времени ti,
, после формирования поверхностей положения определяют оценку местоположения ИРИ в моменты времени ti,  путем вычисления координат
путем вычисления координат  точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов
точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов  ,
,  .
.
Техническим результатом является реализация определения местоположения ИРИ двухпозиционной системой с высокодинамичным измерительным пунктом в случае, когда подвижный ИРИ передает свои координаты с неизвестным смещением.
Указанный технический результат достигают за счет введения новых операций по:
- декодированию принятых сигналов и запоминании полученных координат ςИРИ(ti);
- определению последовательности векторов  ,
,  между точками пространства с полученными координатами, ςИРИ(ti),
между точками пространства с полученными координатами, ςИРИ(ti),  ;
;
- определению оценки местоположения источника радиоизлучения в моменты времени ti,  путем вычисления координат
путем вычисления координат  точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов
точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов  ,
,  , а также модификации операций, реализуемых в способе-прототипе, в частности:
, а также модификации операций, реализуемых в способе-прототипе, в частности:
- принимают сигнал источника радиоизлучения, содержащий информацию о его положении в моменты времени ti,  , I≥2, при этом N=2, а один из измерительных пунктов является высоко динамичным по отношению к источнику радиоизлучения;
, I≥2, при этом N=2, а один из измерительных пунктов является высоко динамичным по отношению к источнику радиоизлучения;
- задержки времени Δti и разности расстояний Δsi определяют для каждого момента времени ti,  , I≥2.
, I≥2.
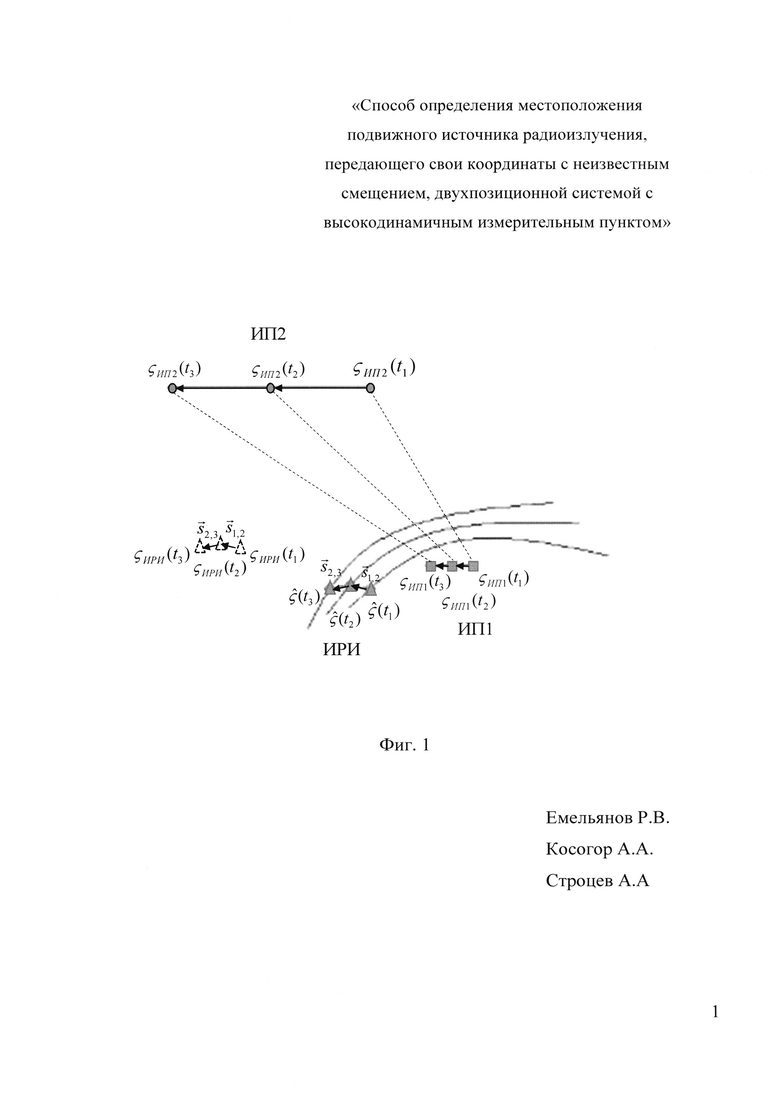
На фиг.1 приведена схема расположения двух ИП и ИРИ при реализации способа.
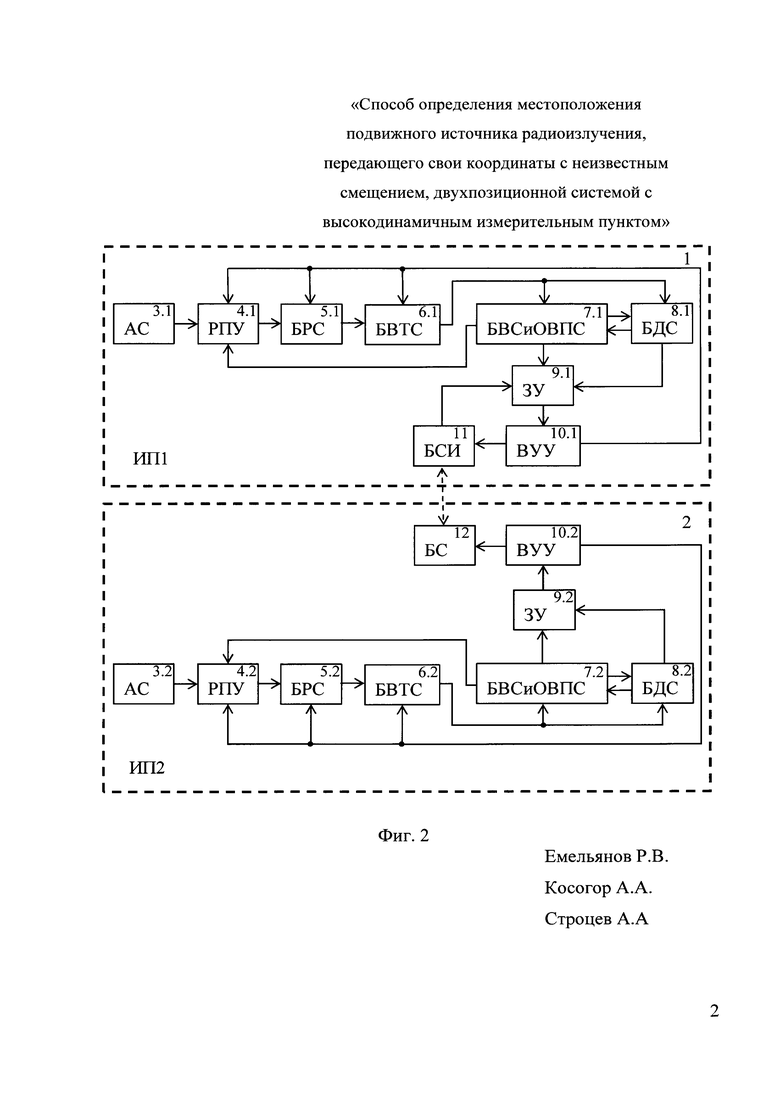
На фиг. 2 приведена структурная схема устройства, реализующего предлагаемый способ определения местоположения подвижного источника радиоизлучения, передающего свои координаты с неизвестным смещением, двухпозиционной системой с высоко динамичным измерительным пунктом.
Сочетание отличительных признаков и свойств предлагаемого способа из литературы не известны, поэтому он соответствует критериям новизны и изобретательского уровня.
Способ определения местоположения подвижного источника радиоизлучения, передающего свои координаты с неизвестным смещением, двухпозиционной системой с высокодинамичным измерительным пунктом реализуется следующим образом:
1 На N ИП с известными координатами принимают сигнал ИРИ, содержащий информацию о его положении в моменты времени ti,  , I≥2, при этом N=2, а один из измерительных пунктов является высокодинамичным по отношению к ИРИ.
, I≥2, при этом N=2, а один из измерительных пунктов является высокодинамичным по отношению к ИРИ.
2 Декодируют принятые сигналы и запоминают полученные координаты ςИРИ(ti).
3 Определяют задержки времени прихода сигналов на измерительные пункты для каждого момента времени ti: Δti,  , I≥2.
, I≥2.
4 По задержкам времени определяют разности расстояний между ИРИ и этими измерительными пунктами для каждого момента времени ti. Δsi,  , I≥2.
, I≥2.
5 Определяют последовательность векторов  ,
,  между точками пространства с полученными координатами ςИРИ(ti),
между точками пространства с полученными координатами ςИРИ(ti),  .
.
6 Для каждой найденной разности расстояний на основе известных координат измерительных пунктов формируют поверхности положения в виде гиперболоидов.
7 Определяют оценку местоположения ИРИ в моменты времени ti,  путем вычисления координат
путем вычисления координат  точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов
точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов  ,
,  .
.
Для реализации пункта 1 на двух измерительных пунктах (ИП1 и ИП2) с известными координатами, например, в геоцентрической прямоугольной экваториальной системе координат:
 ,
,
 ,
,
где ti - моменты времени,  , I≥2;
, I≥2;
Т - знак транспонирования, принимают сигнал ИРИ, содержащий информацию о его положении в моменты времени ti,  . При этом передаваемые ИРИ координаты имеют неизвестное смещение ΔςИРИ=(ΔХИРИ ΔYИРИ ΔZИРИ)T, а один из измерительных пунктов (пусть ИП2) по отношению к перемещению ИРИ является высокодинамичным. Одним из возможных примеров ИРИ, передающих свои координаты, являются бортовые ответчики воздушных объектов, функционирующие в рамках систем, режимов, сервисов или видов наблюдения на частоте 1090 МГц:
. При этом передаваемые ИРИ координаты имеют неизвестное смещение ΔςИРИ=(ΔХИРИ ΔYИРИ ΔZИРИ)T, а один из измерительных пунктов (пусть ИП2) по отношению к перемещению ИРИ является высокодинамичным. Одним из возможных примеров ИРИ, передающих свои координаты, являются бортовые ответчики воздушных объектов, функционирующие в рамках систем, режимов, сервисов или видов наблюдения на частоте 1090 МГц:
- системы вторичной обзорной радиолокации (ВОРЛ), режим S [1];
- расширенный сквиттер [2];
- бортовая система предупреждения столкновений (БСПС) (8 - Doc 9863 AN/461. Руководство по бортовой системе предупреждения столкновений (БСПС). - Международная организация гражданской авиации, 2006. - 245 с.);
- система автоматического зависимого наблюдения (ADS-B, ADS-C, ADS-B 1090 ES) (9 - Doc 9924 AN/474. Руководство по авиационному наблюдению. - Международная организация гражданской авиации, 2010. - 320 с.).
Для реализации пункта 2 принятые от ИРИ сигналы декодируют в соответствии с известными алгоритмами, например, для бортовых ответчиков воздушных объектов в соответствии с руководствами [1] - [3], [8], [9]. По результатам декодирования получают и запоминают координаты ςИРИ(ti) в моменты времени ti,  . При этом полученные координаты отличаются от действительного положения ИРИ на величину неизвестного смещения ΔςИРИ=(ΔХИРИ ΔYИРИ ΔZИРИ)T.
. При этом полученные координаты отличаются от действительного положения ИРИ на величину неизвестного смещения ΔςИРИ=(ΔХИРИ ΔYИРИ ΔZИРИ)T.
Для реализации пункта 3 определяют задержки времени Δti прихода сигналов ИРИ, содержащих информацию о его положении в моменты времени ti,  на измерительные пункты ИП1 и ИП2 для каждого момента времени ti,
на измерительные пункты ИП1 и ИП2 для каждого момента времени ti,  , I≥2. Процедура определения этих задержек времени реализуется на основе известных подходов, описанных, например, в [4]-[7]. Задержки вычисляются относительного ИП с меньшим абсолютным временем приема сигнала ИРИ. Номер этого ИП запоминается.
, I≥2. Процедура определения этих задержек времени реализуется на основе известных подходов, описанных, например, в [4]-[7]. Задержки вычисляются относительного ИП с меньшим абсолютным временем приема сигнала ИРИ. Номер этого ИП запоминается.
Для реализации пункта 4 разности расстояний между ИРИ и измерительными пунктами ИП1 и ИП2 для каждого момента времени ti,  , I≥2 определяют по найденным ранее задержкам времени Δti в соответствии с выражением:
, I≥2 определяют по найденным ранее задержкам времени Δti в соответствии с выражением:
Δsi.=с⋅Δti,
где с - скорость распространения электромагнитных волн.
Для реализации пункта 5 последовательность векторов между точками пространства с полученными координатами ςИРИ(ti),  определяют по выражению вида:
определяют по выражению вида:
 ,
,  .
.
Для реализации пункта 6 для каждой найденной разности расстояний Δsi,  на основе известных координат измерительных пунктов ςИП1(ti), ςИП2(ti), формируют поверхности положения Li в виде гиперболоидов. В параметрическом виде, в соответствии с (10, с. 37 - Розендорн Э.Р. Теория поверхностей. - 2-е изд., перераб. и доп.- М.: ФИЗМАТЛИТ, 2006. - 304 с.), каждую поверхность положения Li можно представить в виде
на основе известных координат измерительных пунктов ςИП1(ti), ςИП2(ti), формируют поверхности положения Li в виде гиперболоидов. В параметрическом виде, в соответствии с (10, с. 37 - Розендорн Э.Р. Теория поверхностей. - 2-е изд., перераб. и доп.- М.: ФИЗМАТЛИТ, 2006. - 304 с.), каждую поверхность положения Li можно представить в виде

где ϕ, θ - криволинейные координаты на поверхности Li, измеряемые в угловых градусах;
 - обозначение нормы вектора;
- обозначение нормы вектора;
ϕмин, ϕмакс - минимальное и максимальное значения криволинейной координаты ϕ, которые ограничены неравенствами ϕмин ≥-90°, ϕмакс ≤90° и определяются из условия

My(ti), Mz(ti) - матрицы поворотов, определяемые угловым положением вектора, заданного точками с координатами ςИП1(ti), ςИП2(ti) и направленного от измерительного пункта с большим абсолютным временем приема сигнала ИРИ к измерительному пункту с меньшим абсолютным временем приема сигнала ИРИ, относительно оси ОХ геоцентрической прямоугольной экваториальной системы координат.
Пункт 7 по определению оценки местоположения ИРИ в моменты времени,  путем вычисления координат
путем вычисления координат  точек, исходя из условий принадлежности их соответствующим поверхностям положения:
точек, исходя из условий принадлежности их соответствующим поверхностям положения:  и соответствия их последовательности векторов
и соответствия их последовательности векторов  ,
,  , можно реализовать, например, на основе процедуры поиска такого вектора
, можно реализовать, например, на основе процедуры поиска такого вектора  , для которого выполняется следующая совокупность условий:
, для которого выполняется следующая совокупность условий:
 .
.
За счет конечной точности измерения задержек времени и координат рассматриваемых объектов в практическом плане эта процедура может быть реализована в виде процедуры минимизации функции от элементов вектора , характеризующей общую невязку выполнения указанной совокупности условий. Построение и реализация таких процедур рассмотрены, например, в (11 - Линник Ю.В. Метод наименьших квадратов и основы математико-статистической теории обработки наблюдений. - 2-е изд. - М.: Гос. изд-во физ. мат.лит, 1962. - 354 с.), (12 - Рейзлин В.И. Численные методы оптимизации: учебное пособие. - Томск: Изд-во ТПУ, 2011. - 105 с.).
На фиг. 1 приведена схема расположения двух ИП и ИРИ при реализации способа с введенными ранее обозначениями при расположении всех объектов в вертикальной плоскости для случая, когда ИРИ расположен ближе к первому ИП.
Таким образом, предлагаемый способ имеет следующие отличительные признаки в последовательности его реализации от способа-прототипа, которые представлены в таблице 1.
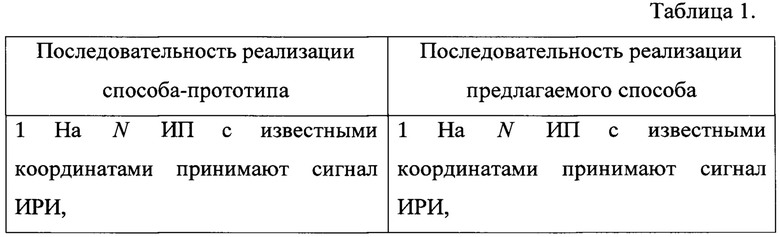
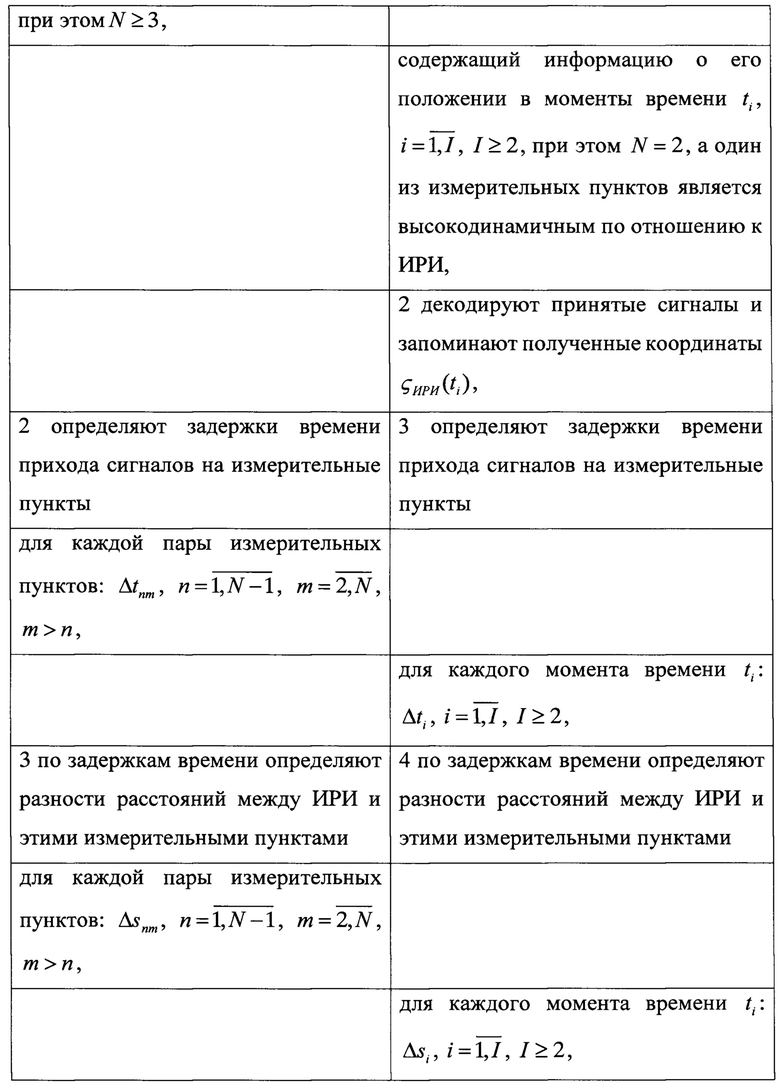
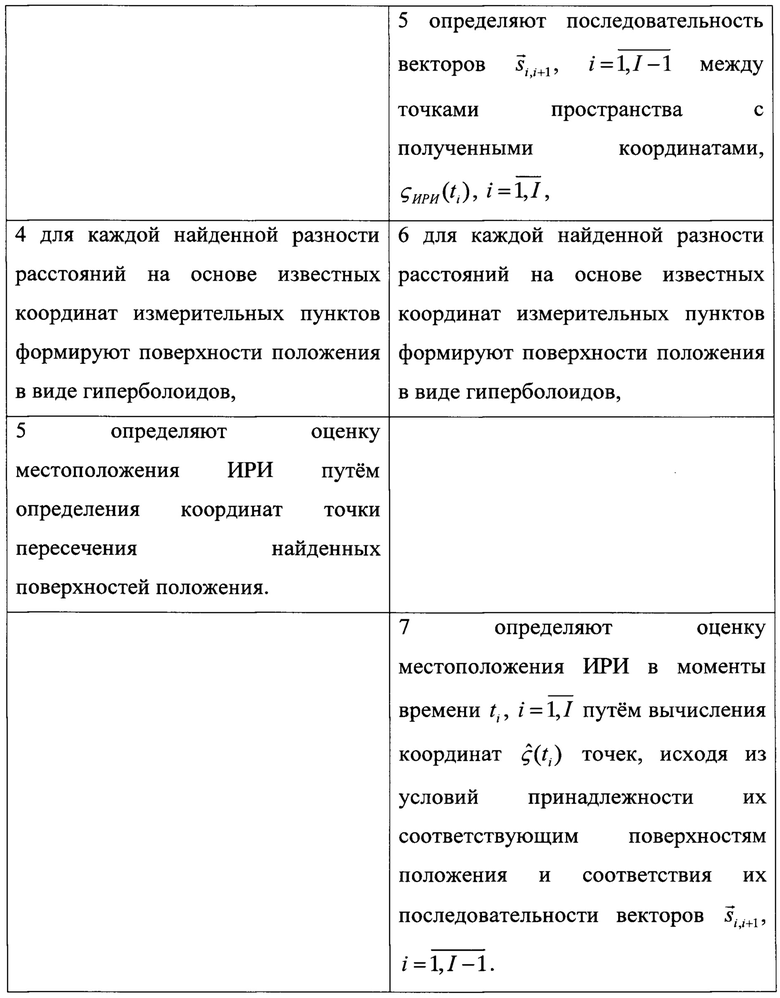
Из представленной таблицы сравнения последовательностей реализации способа-прототипа и предлагаемого способа видно, что в предлагаемом способе, относительно способа-прототипа, дополнительно последовательно принимают сигнал источника радиоизлучения, содержащий информацию о его положении в моменты времени ti,  , I≥2, при этом N=2, а один из измерительных пунктов является высокодинамичным по отношению к источнику радиоизлучения, декодируют принятые сигналы и запоминают полученные координаты ςИРИ(ti), задержки времени Δti и разности расстояний Δsi определяют для каждого момента времени ti,
, I≥2, при этом N=2, а один из измерительных пунктов является высокодинамичным по отношению к источнику радиоизлучения, декодируют принятые сигналы и запоминают полученные координаты ςИРИ(ti), задержки времени Δti и разности расстояний Δsi определяют для каждого момента времени ti,  , I≥2, определяют последовательность векторов
, I≥2, определяют последовательность векторов  ,
,  между точками пространства с полученными координатами, ςИРИ(ti),
между точками пространства с полученными координатами, ςИРИ(ti),  , после формирования поверхностей положения определяют оценку местоположения ИРИ в моменты времени ti,
, после формирования поверхностей положения определяют оценку местоположения ИРИ в моменты времени ti,  путем вычисления координат
путем вычисления координат  точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов
точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов  ,
,  .
.
Структурная схема устройства, реализующего предлагаемый способ, изображена на фигуре 2. В состав устройства входят:
1 - первый измерительный пункт (ИП1), включающий: 3.1 - антенную систему (АС); 4.1 - радиоприемное устройство (РПУ); 5.1 - блок регистрации сигналов (БРС); 6.1 - блок выделения типовых сигналов (БВТС); 7.1 - блок временной синхронизации и оценки времени принятых сигналов (БВСиОВПС); 8.1 - блок декодирования сигналов (БДС); 9.1 - запоминающее устройство (ЗУ); 10.1 - вычислительно-управляющее устройство (ВУУ); 11 - блок связи и индикации (БСИ),
2 - второй измерительный пункт (ИП2), включающий: 3.2 - антенную систему (АС); 4.2 - радиоприемное устройство (РПУ); 5.2 - блок регистрации сигналов (БРС); 6.2 - блок выделения типовых сигналов (БВТС); 7.2 - блок временной синхронизации и оценки времени принятых сигналов (БВСиОВПС); 8.2 - блок декодирования сигналов (БДС); 9.2 - запоминающее устройство (ЗУ); 10.2 - вычислительно-управляющее устройство (ВУУ); 12 - блок связи (БС).
В первом измерительном пункте 1 последовательно соединены АС 3.1, РПУ 4.1, БРС 5.1 и БВТС 6.1. Выход БВТС 6.1 соединен с первыми входами БВСиОВПС 7.1 и БДС 8.1, которые связаны между собой вторыми входами и выходами. Первые выходы БВСиОВПС 7.1 и БДС 8.1 связаны с первым и вторым входами ЗУ 9.1, выход которого связан со входом ВУУ 10.1. Третий выход БВСиОВПС 7.1 связан с синхронизирующим входом РПУ 4.1. Управляющий выход ВУУ 10.1 связан с управляющими входами РПУ 4.1, БРС 5.1 и БВТС 6.1, а информационный выход - со входом БСИ 11, информационный выход которого связан с третьим входом ЗУ 9.1. Во втором измерительном пункте 2 последовательно соединены АС 3.2, РПУ 4.2, БРС 5.2 и БВТС 6.2. Выход БВТС 6.2 соединен с первыми входами БВСиОВПС 7.2 и БДС 8.2, которые связаны между собой вторыми входами и выходами. Первые выходы БВСиОВПС 7.2 и БДС 8.2 связаны с первым и вторым входами ЗУ 9.2, выход которого связан со входом ВУУ 10.2. Третий выход БВСиОВПС 7.2 связан с синхронизирующим входом РПУ 4.2. Управляющий выход ВУУ 10.2 связан с управляющими входами РПУ 4.2, БРС 5.2 и БВТС 6.2, а информационный выход - со входом БС 12, который связан по радиоинтерфейсу с БСИ 11.
В первом (втором) измерительном пункте 1 (2) посредством АС 3.1 (3.2) и РПУ 4.1 (4.2) осуществляется прием радиосигнала от ИРИ и его преобразование в цифровой поток совместно с метками времени, поступающими от БВСиОВПС 7.1 (7.2), а также его регистрация в БРС 5.1 (5.2) с метками времени. Из зарегистрированного с метками времени цифрового потока в БВТС 6.1 (6.2) выделяются типовые сигналы, содержащие информацию о координатах ИРИ, возможно с неизвестным смещением. На основе этих сигналов в БДС 8.1 (8.2) формируются и запоминаются в ЗУ 9.1 (9.2) координаты ςИРИ(ti), а в БВСиОВПС 7.1 (7.2) формируются по меткам времени с учетом синхронизации БВСиОВПС 7.1 и БВСиОВПС 7.2 и далее в ЗУ 9.1 (9.2) запоминаются моменты времени, которые позволяют в ВУУ 10.1 определить задержки времени прихода сигналов на измерительные пункты Δti. При этом моменты времени приема сигналов вторым измерительным пунктом 2 из ЗУ 9.2 поступают в ВУУ 10.1 последовательно через ВУУ 10.2, БС 12, БСИ 11, ЗУ 9.1. По этим задержкам времени в ВУУ 10.1 определяют разности расстояний Δsi между ИРИ и этими измерительными пунктами, а по координатам ςИРИ(ti),  определяют последовательность векторов
определяют последовательность векторов  ,
,  между точками пространства с полученными координатами, ςИРИ(ti), . Далее в ВУУ 10.1 для каждой найденной разности расстояний на основе известных координат измерительных пунктов формируются поверхности положения в виде гиперболоидов, определяются оценки местоположения ИРИ в моменты времени ti,
между точками пространства с полученными координатами, ςИРИ(ti), . Далее в ВУУ 10.1 для каждой найденной разности расстояний на основе известных координат измерительных пунктов формируются поверхности положения в виде гиперболоидов, определяются оценки местоположения ИРИ в моменты времени ti,  путем вычисления координат
путем вычисления координат  точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов
точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов  ,
,  . Оценки местоположения ИРИ в виде вычисленных координат передаются в БСИ 11 для отображения.
. Оценки местоположения ИРИ в виде вычисленных координат передаются в БСИ 11 для отображения.
Таким образом, предлагаемый способ, также как и способ-прототип, позволяет определить местоположение ИРИ. При этом предлагаемый способ, относительно способа-прототипа, реализуется более просто за счет уменьшения числа минимально необходимых измерительных пунктов до двух при использовании информации о передаваемых ИРИ координатах с неизвестным смещением.
Изобретение относится к области радиотехнических систем и может быть использовано, например, в системах наблюдения воздушного пространства, вторичной радиолокации и определения местоположения наземных источников радиоизлучения (ИРИ). Достигаемый технический результат реализация определения местоположения ИРИ двухпозиционной системой с высокодинамичным измерительным пунктом в случае, когда ИРИ передает свои координаты с неизвестным смещением. Указанный технический результат достигается за счет использования операций по декодированию принятых сигналов с запоминанием полученных координат, определению последовательности векторов между точками пространства с полученными координатами с неизвестным смещением, определению оценки местоположения источника радиоизлучения в последовательные моменты времени путем вычисления координат точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов. 1 табл., 2 ил.
Способ определения местоположения подвижного источника радиоизлучения, передающего свои координаты с неизвестным смещением, двухпозиционной системой с высокодинамичным измерительным пунктом, при котором на N измерительных пунктах с известными координатами принимают сигнал источника радиоизлучения, определяют задержки времени прихода сигналов на измерительные пункты, по задержкам времени определяют разности расстояний между источником радиоизлучения и этими измерительными пунктами, для каждой найденной разности расстояний на основе известных координат измерительных пунктов формируют поверхности положения в виде гиперболоидов, отличающийся тем, что принимают сигнал источника радиоизлучения, содержащий информацию о его положении в моменты времени ti,  , I≥2, при этом N=2, а один из измерительных пунктов является высокодинамичным по отношению к источнику радиоизлучения, декодируют принятые сигналы и запоминают полученные координаты ζИРИ(ti), задержки времени Δti и разности расстояний Δsi определяют для каждого момента времени ti,
, I≥2, при этом N=2, а один из измерительных пунктов является высокодинамичным по отношению к источнику радиоизлучения, декодируют принятые сигналы и запоминают полученные координаты ζИРИ(ti), задержки времени Δti и разности расстояний Δsi определяют для каждого момента времени ti,  , I≥2, определяют последовательность векторов
, I≥2, определяют последовательность векторов  ,
,  между точками пространства с полученными координатами ζИРИ(ti),
между точками пространства с полученными координатами ζИРИ(ti),  , после формирования поверхностей положения определяют оценку местоположения источника радиоизлучения в моменты времени ti,
, после формирования поверхностей положения определяют оценку местоположения источника радиоизлучения в моменты времени ti,  путем вычисления координат
путем вычисления координат  точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов
точек, исходя из условий принадлежности их соответствующим поверхностям положения и соответствия их последовательности векторов  ,
,  .
.
| US 7339522 B2, 04.03.2008 | |||
| МНОГОПОЗИЦИОННЫЙ ПАССИВНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС, РЕАЛИЗУЮЩИЙ КОМБИНИРОВАННЫЙ ОДНОЭТАПНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЭТАПЕ ЗАХОДА НА ПОСАДКУ | 2015 |
|
RU2632922C2 |
| ДАЛЬНОМЕРНО-РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2011 |
|
RU2510038C2 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2000 |
|
RU2204145C2 |
| US 7952521 B2, 31.05.2011 | |||
| EP 1489381 A2, 22.12.2004 | |||
| WO 2005045459 A3, 07.07.2005. | |||

