Изобретение относится к области радиотехнических систем и может быть использовано для пассивного определения пространственных параметров запросчика авиационных телекоммуникационных систем на основе приема и обработки сигналов ответов на его запросы одного приемоответчика. В качестве пространственных параметров запросчика могут рассматриваться, например, его пространственное положение и угловое положение вращающейся антенной системы.
К известным способам пассивного определения пространственных параметров запросчиков авиационных телекоммуникационных систем на основе обработки сигналов ответов на его запросы приемоответчиков можно отнести способы определения местоположения источника радиоизлучения (ИРИ) по сигналам ретрансляторов, которые основаны на применении следующих методов:
- разностно-дальномерного (TDOA - time difference of arrival), при реализации которого определяются разности дальностей до источника через разность времени принятого сигнала на пункте приема (ПП);
- разностно-доплеровского (FDOA - frequency difference of arrival), при реализации которого определяются разности частот излучения ИРИ, принятого от ретрансляторов через разность их радиальных скоростей;
- комбинированного (разностно-дальномерного и разностно-доплеровского).
Известен способ определения местоположения ИРИ неизвестных сигналов (1 - патент США №6018312, G01S 5/04. Locating the source of an unknown signal / D.P. Haworth №09/043,444; Filed Sep. 20, 1995, Pub Mar. 20, 1997.), в котором используются сигналы от ИРИ со всенаправленной антенной с неизвестным местоположением и сигналы от опорного ИРИ со всенаправленной антенной с известным местоположением, принимаемые измерительным ПП через спутники-ретрансляторы с известным местоположением.
Этот способ основан на комбинации разностно-дальномерного и разностно-доплеровского методов определения местоположения ИРИ. Он позволяет определить местоположение ИРИ со всенаправленной антенной с использованием опорного ИРИ и спутников-ретрансляторов с известными характеристиками и координатами их местоположения.
Недостатками способа являются необходимость дополнительного определения неизвестного параметра - частоты излучения ИРИ, невозможность определения местоположения ИРИ с периодической структурой сигнала и вращающейся направленной антенной, т.е. пространственных параметров запросчика авиационных телекоммуникационных систем, а также необходимость использования двух и более ретрансляторов (приемоответчиков) с известным местоположением.
Также известен способ определения местоположения ИРИ со всенаправленной антенной, использующий два ретранслятора, когда один из них подвижен, или использующий три ретранслятора, когда они не подвижны (2 - патент США №5570099, G01S 5/04. TDOA/FDOA technique for locating а transmitter / G.A. DesJardins №138,154; Filed Oct. 15, 1993, Pub Oct. 29, 1996). Этот способ также основан на комбинации разностно-дальномерного и разностно-доплеровского методов определения местоположения ИРИ. Он позволяет определить местоположение ИРИ со всенаправленной антенной с использованием нескольких ретрансляторов с известными характеристиками и координатами их местоположения.
Недостатками способа являются необходимость дополнительного определения неизвестного параметра - частоты излучения ИРИ, невозможность определения местоположения ИРИ с периодической структурой сигнала и вращающейся направленной антенной, т.е. пространственных параметров запросчика авиационных телекоммуникационных систем, а также необходимость использования двух и более ретрансляторов (приемоответчиков) с известным местоположением.
Известен способ геолокации земных станций на основе приема сигналов от нескольких спутников-ретрансляторов (3, С. 21-37 - Тяпкин В.Н., Гарин Е.Н. Методы определения навигационных параметров подвижных средств с использованием спутниковой радионавигационной системы ГЛОНАСС: монография. - Красноярск: СФУ, 2012. - 260 с.), в котором местоположение ИРИ определяют на основе пересечения линий положений, сформированных с помощью разностно-дальномерного метода.
В соответствии с ним, определение местоположения ИРИ реализуется в виде следующей последовательности операций:
- на ПП с известными координатами принимают сигналы ИРИ от N' одновременно облучаемых ретрансляторов с известными координатами;
- выбирают «опорный» ретранслятор из числа всех ретрансляторов;
- измеряют первичные пространственно-информационные параметры (ППИП) сигнала ИРИ, представляющие задержки времени между принятыми сигналами «опорного» ретранслятора и оставшимися одновременно облучаемыми ретрансляторами;
- формируют по измеренным ППИП соответствующие первичные координаты - разности расстояний между ИРИ и «опорным» ретранслятором и между ИРИ и каждым одновременно облучаемым ретранслятором;
- формируют для первичных координат поверхности положения (т.е. геометрическое место точек в трехмерном пространстве оценки местоположения ИРИ, соответствующих фиксированному значению первичной координаты);
- формируют линии положения как геометрическое место точек пересечения поверхностей положения с поверхностью Земли;
- если N'≥3 определяют на основе пересечений линий положения местоположение ИРИ, если N'<3 - пересечения линий положения не формируют и местоположение ИРИ не определяют.
Способ обеспечивает определение местоположения ИРИ со всенаправленной антенной.
Недостатком способа является невозможность определения местоположения ИРИ с периодической структурой сигнала и вращающейся направленной антенной, т.е. пространственных параметров запросчика авиационных телекоммуникационных систем, т.к. необходимо одновременное облучение не менее трех ретрансляторов (приемоответчиков), которое зависит от ширины главного лепестка диаграммы направленности антенны запросчика.
Известен способ определения местоположения источника радиоизлучения с периодической структурой сигнала и вращающейся направленной антенной (4 - Патент РФ №2670976, МПК: (2006.01) G01S 5/10. Способ определения местоположения ИРИ с периодической структурой сигнала и вращающейся направленной антенной. Патентообладатель - РФ, от имени которой выступает МО РФ. Ломанцова Ю.А., Морозов А.П., Строцев А.А., Щегров А.А. Публ. - 26.10.2018 г.), принятый за прототип. Для его реализации:
- на ПП с известными координатами: принимают сигналы ИРИ от N' одновременно облучаемых ретрансляторов с известными координатами, последовательно принимают сигналы ИРИ от N'' последовательно облучаемых ретрансляторов с известными координатами;
- определяют характеристики ИРИ: структуру сигнала для одного периода излучения и период вращения направленной антенны;
- выбирают «опорный» ретранслятор из числа всех ретрансляторов;
- экстраполируют сигналы, принятые от «опорного» ретранслятора на основе данных о структуре сигнала для одного периода излучения и периоде вращения направленной антенны;
- измеряют ППИП первой группы, представляющие задержки времени между принятыми сигналами «опорного» ретранслятора и оставшимися одновременно облучаемыми ретрансляторами, второй группы, представляющие задержки времени между экстраполированными сигналами «опорного» ретранслятора и принятыми сигналами оставшихся последовательно облучаемых ретрансляторов, третьей группы, представляющие длительности интервалов времени между моментом положения вращающейся направленной антенны ИРИ, соответствующего направлению главного лепестка ее диаграммы направленности на «опорный» ретранслятор, и моментом положения вращающейся направленной антенны ИРИ, соответствующего направлению главного лепестка ее диаграммы направленности на оставшиеся последовательно облучаемые ретрансляторы;
- формируют по измеренным ППИП соответствующие первичные координаты первой группы - разности расстояний между источником радиоизлучения и «опорным» ретранслятором и между источником радиоизлучения и каждым одновременно облучаемым ретранслятором, второй группы - разности расстояний между ИРИ и «опорным» ретранслятором и между ИРИ и каждым оставшимся последовательно облучаемым ретранслятором, третьей группы - азимутальные углы визирования в плоскости местного горизонта топоцентрической системы координат, связанной с точкой местоположения источника радиоизлучения, пары объектов, составленной из «опорного» ретранслятора и каждым оставшимся последовательно облучаемым ретранслятором;
- формируют для каждой из трех групп первичных координат соответствующие три группы поверхностей положения;
- формируют возможные группы линий положения как геометрическое место точек пересечения поверхностей положения соответствующих групп с поверхностью Земли;
- определяют местоположение ИРИ с периодической структурой сигнала и вращающейся направленной антенной если N'≥3, N''<1 - на основе пересечений линий положения первой группы, если N'≥2 и N''≥1 - на основе пересечений линий положения первой, второй и третьей групп, если N'<2 и N''≥3 - на основе пересечений линий положения второй и третьей групп, если N'≤2 и N''<1 или если N'<2 и N''≤2 - пересечение линий положения не формируют и местоположение ИРИ не определяют.
Способ-прототип позволяет определить местоположения источника радиоизлучения с периодической структурой сигнала и вращающейся направленной антенной, т.е. пространственные параметры запросчика авиационных телекоммуникационных систем.
При реализации способа-прототипа для авиационных телекоммуникационных систем выполняются следующие операции приема и обработки сигналов от одного приемоответчика («ретранслятора с известными координатами»):
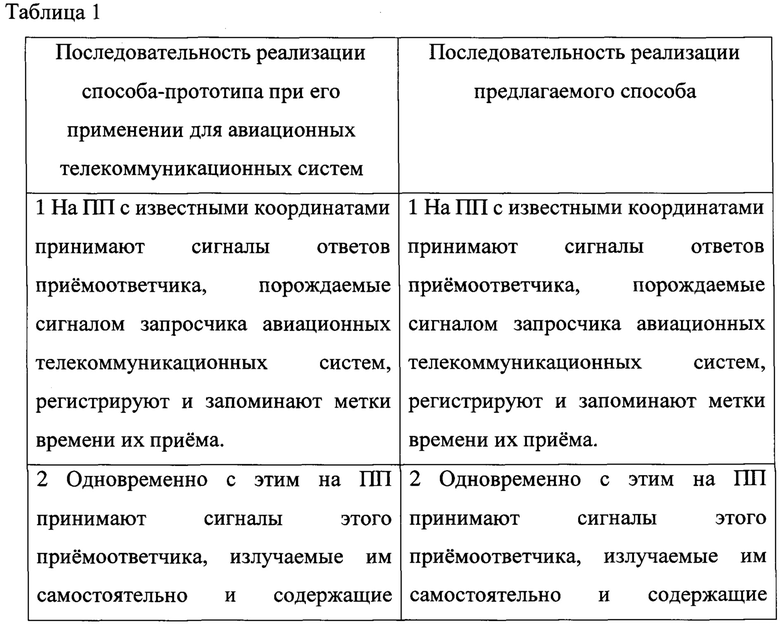
- на ПП с известными координатами принимают сигналы ответов приемоответчика, порождаемые сигналом запросчика авиационных телекоммуникационных систем, регистрируют и запоминают метки времени их приема;
- одновременно с этим на ПП принимают сигналы этого приемоответчика, излучаемые им самостоятельно и содержащие информацию о его местоположении, регистрируют и запоминают метки времени их приема;
- по мере приема сигналов приемоответчика декодируют их, извлекая информацию, привязанную к меткам времени;
- по результатам декодирования ответов приемоответчика, порождаемых сигналом запросчика, определяют характеристики запросчика: запросную последовательность и период вращения направленной антенны;
- по результатам декодирования сигналов приемоответчика, излучаемых им самостоятельно, определяют местоположения приемоответчика, соответствующие меткам времени.
Недостатком способа-прототипа является невозможность определения пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик.
Технической проблемой является отсутствие технических средств определения пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик.
Для решения технической проблемы предлагается способ определения пространственных параметров запросчика авиационных
телекоммуникационных систем по сигналам одного приемоответчика, при котором на ПП с известными координатами принимают сигналы ответов приемоответчика, порождаемые сигналом запросчика авиационных телекоммуникационных систем, регистрируют и запоминают метки времени их приема, одновременно с этим на ПП принимают сигналы этого приемоответчика, излучаемые им самостоятельно и содержащие информацию о его местоположении, регистрируют и запоминают метки времени их приема, по мере приема сигналов приемоответчика декодируют их, извлекая информацию, привязанную к меткам времени, по результатам декодирования ответов приемоответчика, порождаемых сигналом запросчика, определяют характеристики запросчика: запросную последовательность и период вращения направленной антенны, по результатам декодирования сигналов приемоответчика, излучаемых им самостоятельно, определяют местоположения приемоответчика, соответствующие меткам времени.
Согласно изобретению, дополнительно накапливают сигналы приемоответчика и декодированную из них информацию, формируют из накопленных сигналов приемоответчика моменты времени  j=1, 2, …, J3, соответствующие серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, из моментов времени
j=1, 2, …, J3, соответствующие серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, из моментов времени  j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, данных о местоположениях приемоответчика, соответствующих меткам времени, и значения периода вращения направленной антенны запросчика формируют сигнальную нормированную к периоду вращения направленной антенны запросчика последовательность
j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, данных о местоположениях приемоответчика, соответствующих меткам времени, и значения периода вращения направленной антенны запросчика формируют сигнальную нормированную к периоду вращения направленной антенны запросчика последовательность  приведенную к положениям приемоответчика
приведенную к положениям приемоответчика  j=1, 2, …, J3, многократно моделируют нормированную к периоду вращения направленной антенны запросчика последовательность
j=1, 2, …, J3, многократно моделируют нормированную к периоду вращения направленной антенны запросчика последовательность  приведенную к положениям приемоответчика j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика, на основе расчета функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения направленной антенны запросчика последовательностей, формируют оценку пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик.
приведенную к положениям приемоответчика j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика, на основе расчета функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения направленной антенны запросчика последовательностей, формируют оценку пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик.
Техническим результатом является определение пространственных параметров запросчика телекоммуникационных систем, которое основано на приеме ответов на его запросы только одного приемоответчика.
Указанный технический результат достигают за счет введения новых операций: накопления сигналов приемоответчика и декодированной из них информации, формировании из накопленных сигналов приемоответчика моментов времени  j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, из моментов времени
j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, из моментов времени  j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, данных о местоположениях приемоответчика, соответствующих меткам времени, и значения периода вращения направленной антенны запросчика формировании сигнальной нормированной к периоду вращения направленной антенны запросчика последовательности
j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, данных о местоположениях приемоответчика, соответствующих меткам времени, и значения периода вращения направленной антенны запросчика формировании сигнальной нормированной к периоду вращения направленной антенны запросчика последовательности  приведенной к положениям приемоответчика
приведенной к положениям приемоответчика  j=1, 2, …, J3, многократного моделирования нормированной к периоду вращения направленной антенны запросчика последовательности
j=1, 2, …, J3, многократного моделирования нормированной к периоду вращения направленной антенны запросчика последовательности  приведенной к положениям приемоответчика
приведенной к положениям приемоответчика  j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика, на основе расчета функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения направленной антенны запросчика последовательностей, формировании оценки пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик.
j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика, на основе расчета функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения направленной антенны запросчика последовательностей, формировании оценки пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик.
На фиг. приведена структурная схема устройства, реализующего предлагаемый способ определения пространственных параметров запросчика авиационных телекоммуникационных систем по сигналам одного приемоответчика.
Сочетание отличительных признаков и свойств предлагаемого способа из литературы не известны, поэтому он соответствует критериям новизны и изобретательского уровня.
Способ определения пространственных параметров запросчика авиационных телекоммуникационных систем по сигналам одного приемоответчика реализуется следующим образом:
1 На ПП с известными координатами принимают сигналы ответов приемоответчика, порождаемые сигналом запросчика авиационных телекоммуникационных систем, регистрируют и запоминают метки времени их приема.
2 Одновременно с этим на ПП принимают сигналы этого приемоответчика, излучаемые им самостоятельно и содержащие информацию о его местоположении, регистрируют и запоминают метки времени их приема.
3 По мере приема сигналов приемоответчика декодируют их, извлекая информацию, привязанную к меткам времени.
4 По результатам декодирования ответов приемоответчика, порождаемых сигналом запросчика, определяют характеристики запросчика: запросную последовательность и период вращения направленной антенны.
5 По результатам декодирования сигналов приемоответчика, излучаемых им самостоятельно, определяют местоположения приемоответчика, соответствующие меткам времени.
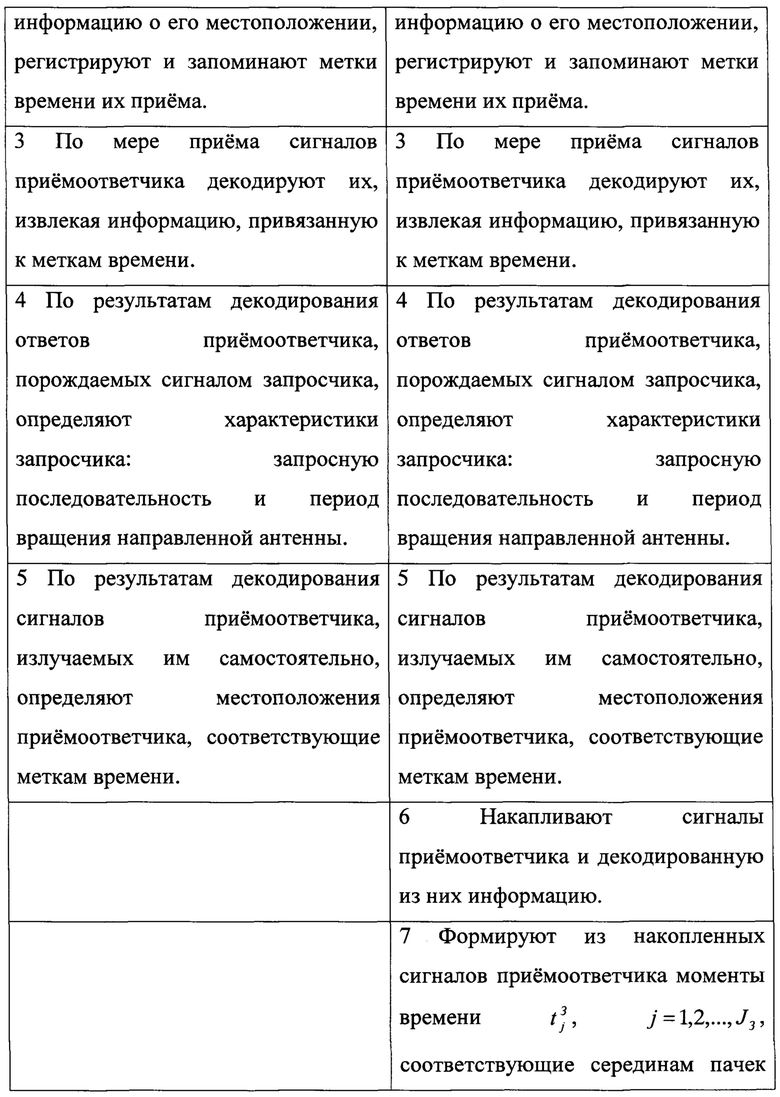
6 Накапливают сигналы приемоответчика и декодированную из них информацию.
7 Формируют из накопленных сигналов приемоответчика моменты времени  j=1, 2, …, J3, соответствующие серединам пачек ответов приемоответчика, порождаемых сигналом запросчика.
j=1, 2, …, J3, соответствующие серединам пачек ответов приемоответчика, порождаемых сигналом запросчика.
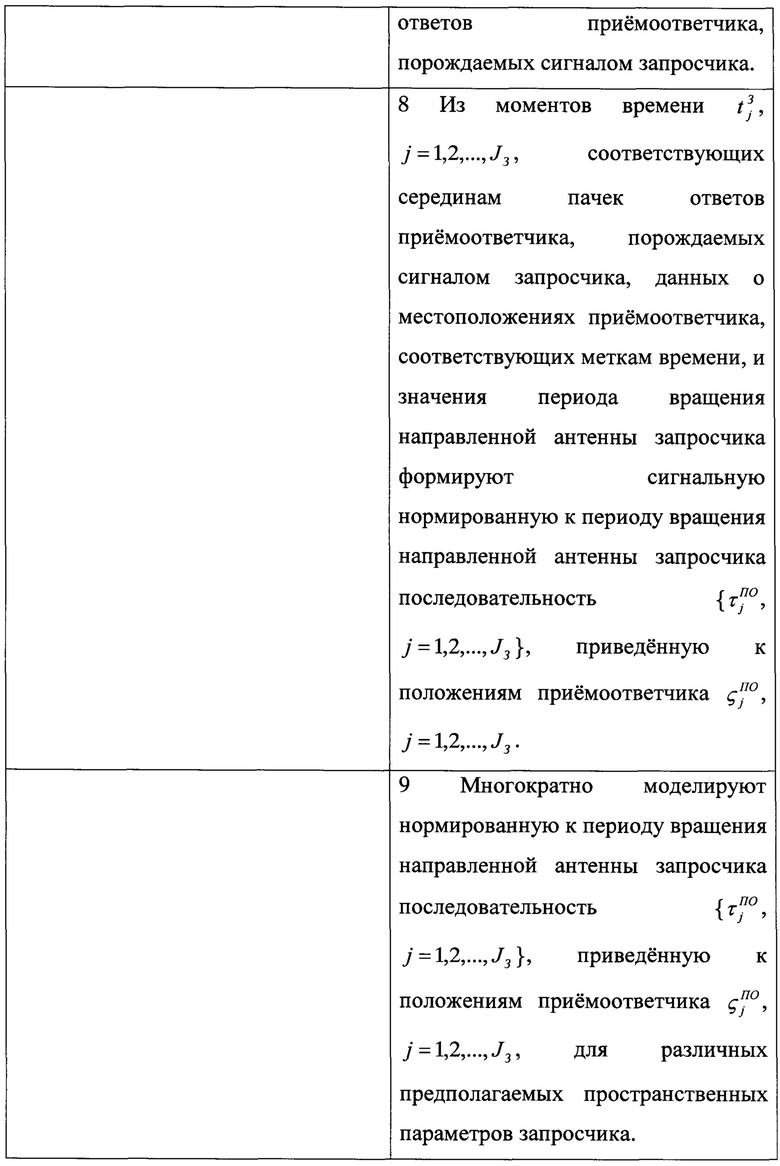
8 Из моментов времени  j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, данных о местоположениях приемоответчика, соответствующих меткам времени, и значения периода вращения направленной антенны запросчика формируют сигнальную нормированную к периоду вращения направленной антенны запросчика последовательность
j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, данных о местоположениях приемоответчика, соответствующих меткам времени, и значения периода вращения направленной антенны запросчика формируют сигнальную нормированную к периоду вращения направленной антенны запросчика последовательность  приведенную к положениям приемоответчика
приведенную к положениям приемоответчика  j=1, 2, …, J3.
j=1, 2, …, J3.
9 Многократно моделируют нормированную к периоду вращения направленной антенны запросчика последовательность  приведенную к положениям приемоответчика
приведенную к положениям приемоответчика  j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика.
j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика.
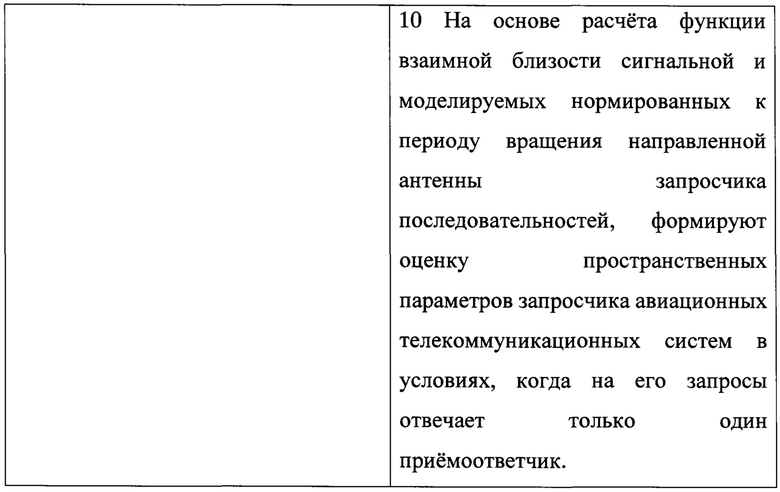
10 На основе расчета функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения направленной антенны запросчика последовательностей формируют оценку пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик.
Для реализации пункта 1 аналоговый сигнал s1(t) от ответов приемоответчика, порождаемых сигналом запросчика авиационных телекоммуникационных систем, как и в способе-прототипе, принимают на ПП с известными координатами и преобразуют в цифровую форму в виде комплексных отсчетов  n1=1, 2, … с помощью радиоприемного устройства (РПУ), например, одноканального цифрового приемника сигналов. В результате обработки комплексных отсчетов
n1=1, 2, … с помощью радиоприемного устройства (РПУ), например, одноканального цифрового приемника сигналов. В результате обработки комплексных отсчетов  n1=1, 2, … в РПУ определяются два кадрирующих, двенадцать информационных импульсов и импульс SP1 (15-импульсный ответ) в соответствии с характеристиками передачи ответа, изложенными, например, в (5, п. 3.1.1 - Приложение 10 к Конвенции о международной гражданской авиации. Авиационная электросвязь. Том IV. Системы наблюдения и предупреждения столкновений. Международная организация гражданской авиации. 2014. - 318 с.), (6 - Doc 9924 AN/474 Руководство по авиационному наблюдению. Международная организация гражданской авиации. 2010. - 320 с.). Далее РПУ передает в устройство регистрации сигналов «значения» (0 - нет импульса, 1 - импульс есть) импульсов [5, п. 3.1.1]:
n1=1, 2, … в РПУ определяются два кадрирующих, двенадцать информационных импульсов и импульс SP1 (15-импульсный ответ) в соответствии с характеристиками передачи ответа, изложенными, например, в (5, п. 3.1.1 - Приложение 10 к Конвенции о международной гражданской авиации. Авиационная электросвязь. Том IV. Системы наблюдения и предупреждения столкновений. Международная организация гражданской авиации. 2014. - 318 с.), (6 - Doc 9924 AN/474 Руководство по авиационному наблюдению. Международная организация гражданской авиации. 2010. - 320 с.). Далее РПУ передает в устройство регистрации сигналов «значения» (0 - нет импульса, 1 - импульс есть) импульсов [5, п. 3.1.1]:
{С1, А1, С2, А2, С4, А4, X, B1, D1, В2, D2, В4, D4}
каждой  m1=1, 2, … последовательности в сопровождении со значениями времени
m1=1, 2, … последовательности в сопровождении со значениями времени m1=1, 2, … приема соответствующей последовательности.
m1=1, 2, … приема соответствующей последовательности.
Для реализации пункта 2 аналоговый сигнал s2(t) от ответов приемоответчика, излучаемых им самостоятельно, содержащих информацию о его местоположении, например, сигналы режима S (7 - Doc 9871 AN/464 Технические положения, касающиеся услуг режима S и расширенного сквиттера. Международная организация гражданской авиации. 2008. - 245 с.), принимают и преобразуют в цифровую форму в виде комплексных отсчетов  n2=1, 2, …. Прием осуществляют с помощью того же РПУ на ПП в соответствии с [5, п. 3.1.2], в частности, с несущей частотой 1090 МГц и спектром сигнала, указанным в [5, п. 3.1.2.2.2].
n2=1, 2, …. Прием осуществляют с помощью того же РПУ на ПП в соответствии с [5, п. 3.1.2], в частности, с несущей частотой 1090 МГц и спектром сигнала, указанным в [5, п. 3.1.2.2.2].
В РПУ по комплексным отсчетам  n2=1, 2, … определяется преамбула, представляющая собой последовательность из четырех импульсов [5, п. 3.1.2.2.5.1.1], и блок данных, включающий последовательность с двоичной фазово-импульсной модуляцией и частотой изменения данных 1 Мбит/с. Формы импульсов определены в [5, п. 3.1.2.2.4.1]. При определении преамбулы фиксируется момент времени
n2=1, 2, … определяется преамбула, представляющая собой последовательность из четырех импульсов [5, п. 3.1.2.2.5.1.1], и блок данных, включающий последовательность с двоичной фазово-импульсной модуляцией и частотой изменения данных 1 Мбит/с. Формы импульсов определены в [5, п. 3.1.2.2.4.1]. При определении преамбулы фиксируется момент времени  ее приема.
ее приема.
Сигналы каждого блока данных, в виде последовательности «1» и «0» с 56 или 112 элементами, регистрируются, запоминаются времена  m2=1, 2, … их приема. В качестве
m2=1, 2, … их приема. В качестве  m2=1, 2, … рассматриваются зафиксированные моменты времени приема преамбул.
m2=1, 2, … рассматриваются зафиксированные моменты времени приема преамбул.
Для реализации пункта 3, по мере приема сигналов приемоответчика, формирования последовательностей  m1=1, 2, … и сигналов блоков данных
m1=1, 2, … и сигналов блоков данных  m2=1, 2, …, в соответствии с [5, п. 3.1.1] декодируют последовательности
m2=1, 2, …, в соответствии с [5, п. 3.1.1] декодируют последовательности  m1=1, 2, …, а в соответствии с [5, п. 3.1.2] и [7, приложение А] декодируют сигналы блоков данных
m1=1, 2, …, а в соответствии с [5, п. 3.1.2] и [7, приложение А] декодируют сигналы блоков данных  m2=1, 2, ….
m2=1, 2, ….
В результате декодирования каждой последовательности  m1=1, 2, … формируются данные
m1=1, 2, … формируются данные  m1=1, 2, …, где
m1=1, 2, …, где  является информацией, декодированной из последовательности
является информацией, декодированной из последовательности  Такой информацией может являться, например, четырехзначное число, обозначающее временный идентификатор воздушного судна «А» или значение его текущей высоты «С».
Такой информацией может являться, например, четырехзначное число, обозначающее временный идентификатор воздушного судна «А» или значение его текущей высоты «С».
В результате декодирования каждого сигнала блока данных  m2=1, 2, … формируются данные
m2=1, 2, … формируются данные  m2=1, 2, …, где
m2=1, 2, …, где  является информацией, декодированной из сигнала блока данных
является информацией, декодированной из сигнала блока данных  для уникального идентификатора - номера ICAO «SICAO» воздушного судна. Такой информацией может являться, например, временный идентификатор воздушного судна «А», значение его текущих высоты «С», широты «B» и долготы «L».
для уникального идентификатора - номера ICAO «SICAO» воздушного судна. Такой информацией может являться, например, временный идентификатор воздушного судна «А», значение его текущих высоты «С», широты «B» и долготы «L».
Для реализации пункта 4 по набору данных m1=1, 2, …, накопленному, например, за четыре периода вращения направленной антенны (с предполагаемым значением от 5 до 12 с), на основе статистических методов формируются оценка периода вращения направленной антенны запросчика
m1=1, 2, …, накопленному, например, за четыре периода вращения направленной антенны (с предполагаемым значением от 5 до 12 с), на основе статистических методов формируются оценка периода вращения направленной антенны запросчика  и излучаемой им запросной последовательности
и излучаемой им запросной последовательности  где
где  - тип запроса в m3-й позиции запросной последовательности, например, «А» или «С», в ответ на который получен ряд ответов из набора данных
- тип запроса в m3-й позиции запросной последовательности, например, «А» или «С», в ответ на который получен ряд ответов из набора данных  m1=1, 2, …,
m1=1, 2, …,  - длительность интервала времени между запросами m3-й и m3+1-й позиций запросной последовательности, М3 - количество запросов запросной последовательности.
- длительность интервала времени между запросами m3-й и m3+1-й позиций запросной последовательности, М3 - количество запросов запросной последовательности.
Для реализации пункта 5 из набора данных  m2=1, 2, … для уникального идентификатора - номера ICAO «SICAO» воздушного судна выделяются только его координаты
m2=1, 2, … для уникального идентификатора - номера ICAO «SICAO» воздушного судна выделяются только его координаты  m4=1, 2, …, для меток времени
m4=1, 2, …, для меток времени  m4=1, 2, …, которые соответствуют ряду значений
m4=1, 2, …, которые соответствуют ряду значений  m2=1, 2, ….
m2=1, 2, ….
Для реализации пункта 6 сигналы приемоответчика воздушного судна для уникального номера ICAO «S1CAO» в виде последовательностей  m1=1, 2, …, сигналов блоков данных
m1=1, 2, …, сигналов блоков данных m2=1, 2, …, и результаты их декодирования в виде
m2=1, 2, …, и результаты их декодирования в виде  m1=1, 2, …,
m1=1, 2, …,  m4=1, 2, … накапливают в течение, например, от 20 до 25 минут или по длительности приема сигналов приемоответчика воздушного судна с уникальным номером ICAO «SlCAO».
m4=1, 2, … накапливают в течение, например, от 20 до 25 минут или по длительности приема сигналов приемоответчика воздушного судна с уникальным номером ICAO «SlCAO».
Для реализации пункта 7 путем сравнения запросной последовательности  с
с  m1=1, 2, … выделяют из
m1=1, 2, … выделяют из  m1=1, 2, … последовательности
m1=1, 2, … последовательности  j=1, 2, …, J3, каждая из которых соответствует ответам приемоответчика для одного периода вращения направленной антенны запросчика, т.е. выделяют пачки ответов приемоответчика, порождаемых сигналом запросчика. Для каждой j-ой пачки определяют моменты времени
j=1, 2, …, J3, каждая из которых соответствует ответам приемоответчика для одного периода вращения направленной антенны запросчика, т.е. выделяют пачки ответов приемоответчика, порождаемых сигналом запросчика. Для каждой j-ой пачки определяют моменты времени  j=1, 2, …, J3, соответствующие серединам j-х пачек ответов приемоответчика, порождаемых сигналом запросчика, по выражению
j=1, 2, …, J3, соответствующие серединам j-х пачек ответов приемоответчика, порождаемых сигналом запросчика, по выражению
Для реализации пункта 8 по  m4=1, 2, … на основе интерполяции формируют оценки местоположения приемоответчика в моменты времени
m4=1, 2, … на основе интерполяции формируют оценки местоположения приемоответчика в моменты времени  j=1, 2, …, J3, т.е.
j=1, 2, …, J3, т.е.

где  - оценка широты местоположения приемоответчика в момент времени
- оценка широты местоположения приемоответчика в момент времени 
 - оценка долготы местоположения приемоответчика в момент времени
- оценка долготы местоположения приемоответчика в момент времени 
 - оценка высоты местоположения приемоответчика в момент времени
- оценка высоты местоположения приемоответчика в момент времени 
На основе моментов времени  j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, и значения периода вращения направленной антенны запросчика
j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, и значения периода вращения направленной антенны запросчика  формируют сигнальную нормированную к периоду вращения
формируют сигнальную нормированную к периоду вращения  последовательность
последовательность  например, по выражению
например, по выражению
где  - интервал времени, соответствующий длительности прохождения радиосигнала от приемоответчика, находящегося в точке с координатами
- интервал времени, соответствующий длительности прохождения радиосигнала от приемоответчика, находящегося в точке с координатами  до ПП с известными координатами.
до ПП с известными координатами.
Для реализации пункта 9 многократно моделируют нормированную к периоду вращения последовательность  приведенную к положениям приемоответчика
приведенную к положениям приемоответчика  j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика. Для этого формируют множество различных предполагаемых пространственных параметров запросчика, например, в виде его координат
j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика. Для этого формируют множество различных предполагаемых пространственных параметров запросчика, например, в виде его координат

где  - широта i-го предполагаемого местоположения запросчика;
- широта i-го предполагаемого местоположения запросчика;
 - долгота i-го предполагаемого местоположения запросчика;
- долгота i-го предполагаемого местоположения запросчика;
 - высота i-го предполагаемого местоположения запросчика.
- высота i-го предполагаемого местоположения запросчика.
На основе геодезических и геометрических соотношений, определяющих оператор Fα, который позволяет вычислить по координатам трех точек пространства, заданным в виде геодезических широты, долготы и высоты, азимутальный угол между двумя точками, относительно третьей, формируют моменты времени

где z - величина, показывающая характер изменения координат приемоответчика относительно направления вращения направленной антенны запросчика, z=-1, если перемещение от  к
к  относительно
относительно  осуществляется против часовой стрелки, z=1, если перемещение от
осуществляется против часовой стрелки, z=1, если перемещение от  к относительно
к относительно  осуществляется по ходу поворота часовой стрелки.
осуществляется по ходу поворота часовой стрелки.
Моделируют нормированную к периоду вращения направленной антенны запросчика последовательность, приведенную к положениям приемоответчика  для различных предполагаемых пространственных параметров запросчика, например, по выражению
для различных предполагаемых пространственных параметров запросчика, например, по выражению
Для реализации пункта 10 для каждых i-x предполагаемых пространственных параметров запросчика, в частности, для каждого i-го предполагаемого местоположения запросчика  вычисляют i-ое значение функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения
вычисляют i-ое значение функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения  последовательностей, например, по выражению
последовательностей, например, по выражению

В качестве оценки пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик, выбирают i*-е предполагаемые пространственные параметры  для которых
для которых
Предлагаемый способ имеет следующие отличительные признаки в последовательности его реализации от способа-прототипа, которые представлены в таблице 1.
Из представленной таблицы 1 сравнения последовательностей реализации способа-прототипа и предлагаемого способа видно, что в предлагаемом способе, относительно способа-прототипа, дополнительно накапливают сигналы приемоответчика и декодированную из них информацию, формируют из накопленных сигналов приемоответчика моменты времени  j=1, 2, …, J3, соответствующие серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, из моментов времени
j=1, 2, …, J3, соответствующие серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, из моментов времени  j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, данных о местоположениях приемоответчика, соответствующих меткам времени, и значения периода вращения направленной антенны запросчика формируют сигнальную нормированную к периоду вращения направленной антенны запросчика последовательность
j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, данных о местоположениях приемоответчика, соответствующих меткам времени, и значения периода вращения направленной антенны запросчика формируют сигнальную нормированную к периоду вращения направленной антенны запросчика последовательность  приведенную к положениям приемоответчика
приведенную к положениям приемоответчика  j=1, 2, …, J3, многократно моделируют нормированную к периоду вращения направленной антенны запросчика последовательность
j=1, 2, …, J3, многократно моделируют нормированную к периоду вращения направленной антенны запросчика последовательность  приведенную к положениям приемоответчика
приведенную к положениям приемоответчика  j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика, на основе расчета функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения направленной антенны запросчика последовательностей, формируют оценку пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик.
j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика, на основе расчета функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения направленной антенны запросчика последовательностей, формируют оценку пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик.
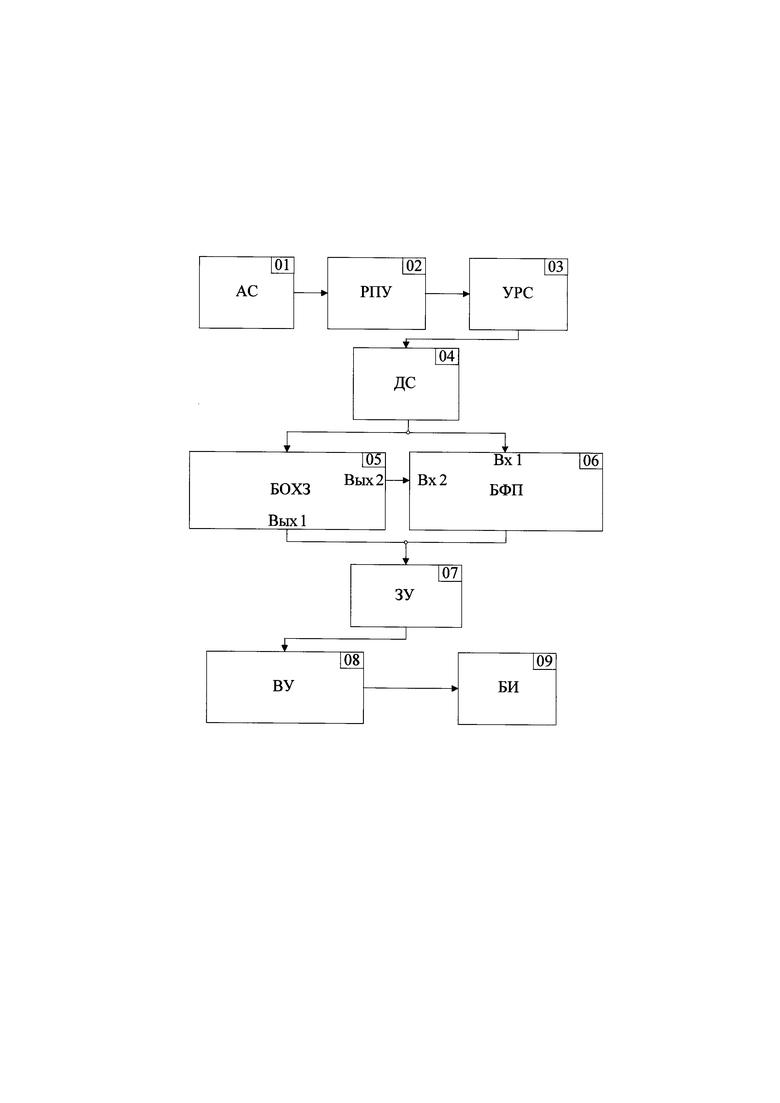
Структурная схема устройства, реализующего предлагаемый способ, изображена на фигуре. В состав устройства входят:
01 - антенная система (АС);
02 - радиоприемное устройство (РПУ);
03 - устройство регистрации сигналов (УРС);
04 - декодер сигналов (ДС);
05 - блок оценки характеристик запросчика (БОХЗ);
06 - блок формирования последовательности (БФП);
07 - запоминающее устройство (ЗУ);
08 - вычислительное устройство (ВУ);
09 - блок индикации (БИ).
Выход АС 01 соединен с входом РПУ 02. Выход РПУ 02 соединен с входом УРС 03, выход которого последовательно соединен с входом ДС 04. Выход ДС 04 соединен с входом БОХЗ 05 и первым входом БФП 06. Второй выход БОХЗ 05 соединен с вторым входом БФП 06. Первый выход БОХЗ 05 и выход БФП 06 соединены с входом ЗУ 07, выход которого соединен с входом ВУ 08. Выход ВУ 08 соединен со входом БИ 09, являющимся конечным элементом, на котором информация показывается визуально.
АС 01 принимает сигналы ответов приемоответчика, порождаемые сигналом запросчика авиационных телекоммуникационных систем, и сигналы этого приемоответчика, излучаемые им самостоятельно и содержащие информацию о его местоположении. Кроме того, АС 01 принимает сигналы глобальных навигационных спутниковых систем. Принятые от приемоответчика сигналы АС 01 передает в РПУ 02, в котором выполняется аналого-цифровое преобразование с выделением квадратурных каналов, цифровая фильтрация и получение амплитудных значений. Принятые сигналы глобальных навигационных спутниковых систем АС 01 также передает в РПУ 02, в котором выполняется выделение временных меток, позволяющих определить время приема сигналов приемоответчика.
Из РПУ 02 обработанные сигналы поступают в УРС 03 для регистрации сигналов приемоответчика и запоминания времени их приема.
Из УРС 03 по мере приема и регистрации сигналов приемоответчика они поступают в ДС 04. В ДС 04 сигналы приемоответчика декодируются с извлечением информации, привязанной к меткам времени.
Из ДС 04 извлеченная информация поступает в БОХЗ 05 и БФП 06. В БОХЗ 05 происходит накопление, например, за четыре периода вращения направленной антенны запросчика. В результате статистической обработки накопленной сигнальной информации формируются оценка периода вращения направленной антенны запросчика и запросная последовательность. Эти характеристики запросчика поступают в БФП 06. В нем из декодированных сигналов приемоответчика выделяются только координаты воздушного судна с метками их времени, накапливают эти данные вместе с результатами декодирования сигналов приемоответчика, порождаемых сигналом запросчика авиационных телекоммуникационных систем. По ним выделяются последовательности, каждая из которых соответствует ответам приемоответчика для одного периода вращения направленной антенны запросчика, т.е. выделяются пачки ответов приемоответчика, порождаемые сигналом запросчика. Для каждой пачки ответов определяются моменты времени, соответствующие серединам этих пачек ответов. Для этих значений моментов времени на основе интерполяции, ранее выделенных координат воздушного судна с метками их времени, формируют оценки местоположения приемоответчика, а также формируют сигнальную последовательность, нормированную к периоду вращения направленной антенны запросчика. Эти данные из БФП 06 поступают в ЗУ 07, куда из БОХЗ 05 также поступает оценка периода вращения направленной антенны запросчика.
Из ЗУ 07 записанная и накопленная сигнальная информация поступает в ВУ 08, где на ее основе для различных предполагаемых местоположений запросчика осуществляется расчет моделируемых последовательностей, нормированных к периоду вращения направленной антенны запросчика. По результатам вычисления функции взаимной близости сигнальной и моделируемых последовательностей, нормированных к периоду вращения, определяется оценка пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик.
Полученные данные передаются из ВУ 08 на БИ 09 для визуализации полученных результатов.
Таким образом, предлагаемый способ, относительно способа-прототипа, позволяет реализовать определение пространственных параметров запросчика телекоммуникационных систем, которое основано на приеме ответов на его запросы только одного приемоответчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения приёмника сигналов авиационных телекоммуникационных систем | 2019 |
|
RU2716834C1 |
| Способ определения местоположения воздушных объектов по сигналам их бортовых ответчиков систем контроля воздушного движения | 2016 |
|
RU2626765C1 |
| Способ определения местоположения источника радиоизлучения с периодической структурой сигнала и вращающейся направленной антенной | 2017 |
|
RU2670976C9 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ВОЗДУШНЫХ ОБЪЕКТОВ ПРИ ПАССИВНОЙ БИСТАТИЧЕСКОЙ РАДИОЛОКАЦИИ | 2012 |
|
RU2504797C2 |
| СПОСОБ АВИАЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2021 |
|
RU2778179C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2837386C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И СПОСОБ ОПРЕДЕЛЕНИЯ И ФОРМИРОВАНИЯ ДЕЙСТВУЮЩИХ ЗАПРОСНЫХ СИГНАЛОВ | 2000 |
|
RU2208812C2 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2834416C1 |
| Способ дистанционного управления параметрами контрольного ответчика | 2023 |
|
RU2827943C1 |
Изобретение относится к области радиотехнических систем и может быть использовано для пассивного определения пространственных параметров запросчика авиационных телекоммуникационных систем на основе приема и обработки сигналов ответов на его запросы одного приемоответчика. Техническим результатом является определение пространственных параметров запросчика телекоммуникационных систем, которое основано на приеме ответов на его запросы только одного приемоответчика. Указанный технический результат достигают за счет введения новых операций: накопления сигналов приемоответчика и декодированной из них информации, формирования из накопленных сигналов приемоответчика моментов времени  j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, из моментов времени
j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, из моментов времени  j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, данных о местоположениях приемоответчика, соответствующих меткам времени, и значения периода вращения направленной антенны запросчика, формирования сигнальной нормированной к периоду вращения направленной антенны запросчика последовательности
j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, данных о местоположениях приемоответчика, соответствующих меткам времени, и значения периода вращения направленной антенны запросчика, формирования сигнальной нормированной к периоду вращения направленной антенны запросчика последовательности  приведенной к положениям приемоответчика
приведенной к положениям приемоответчика  j=1, 2, …, J3, многократного моделирования нормированной к периоду вращения направленной антенны запросчика последовательности
j=1, 2, …, J3, многократного моделирования нормированной к периоду вращения направленной антенны запросчика последовательности  приведенной к положениям приемоответчика
приведенной к положениям приемоответчика  j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика, на основе расчета функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения направленной антенны запросчика последовательностей формирования оценки пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик. 1 ил., 1 табл.
j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика, на основе расчета функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения направленной антенны запросчика последовательностей формирования оценки пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик. 1 ил., 1 табл.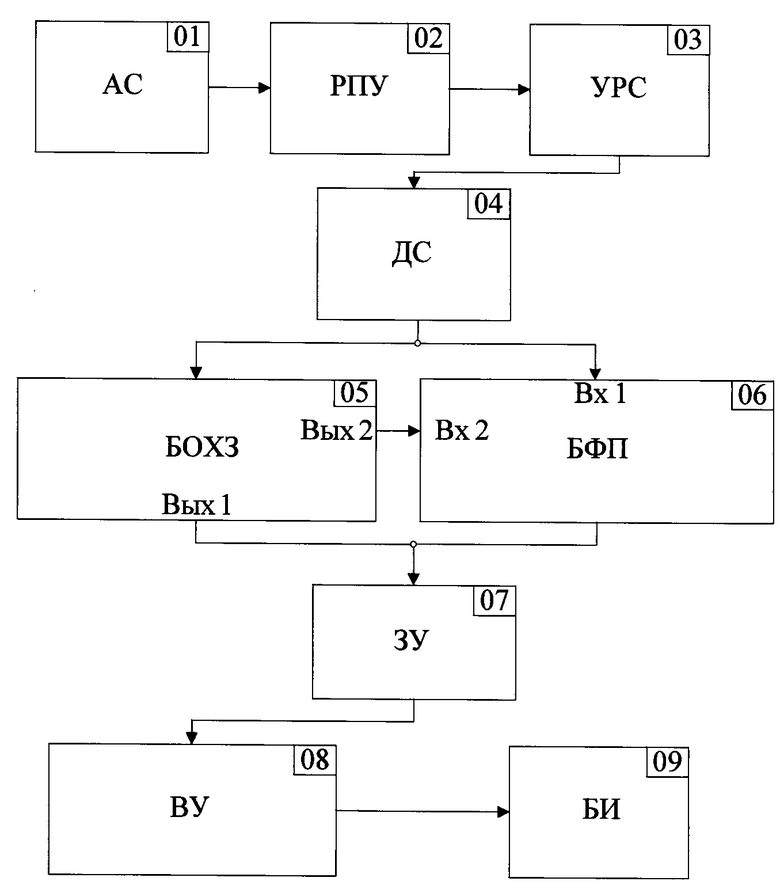
Способ определения пространственных параметров запросчика авиационных телекоммуникационных систем по сигналам одного приемоответчика, при котором на пункте приема с известными координатами принимают сигналы ответов приемоответчика, порождаемые сигналом запросчика авиационных телекоммуникационных систем, регистрируют и запоминают метки времени их приема, одновременно с этим на пункте приема принимают сигналы этого приемоответчика, излучаемые им самостоятельно и содержащие информацию о его местоположении, регистрируют и запоминают метки времени их приема, по мере приема сигналов приемоответчика декодируют их, извлекая информацию, привязанную к меткам времени, по результатам декодирования ответов приемоответчика, порождаемых сигналом запросчика, определяют характеристики запросчика: запросную последовательность и период вращения направленной антенны, по результатам декодирования сигналов приемоответчика, излучаемых им самостоятельно, определяют местоположения приемоответчика, соответствующие меткам времени, отличающийся тем, что дополнительно, накапливают сигналы приемоответчика и декодированную из них информацию, формируют из накопленных сигналов приемоответчика моменты времени  j=1, 2, …, J3, соответствующие серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, из моментов времени
j=1, 2, …, J3, соответствующие серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, из моментов времени  j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, данных о местоположениях приемоответчика, соответствующих меткам времени, и значения периода вращения направленной антенны запросчика формируют сигнальную нормированную к периоду вращения направленной антенны запросчика последовательность
j=1, 2, …, J3, соответствующих серединам пачек ответов приемоответчика, порождаемых сигналом запросчика, данных о местоположениях приемоответчика, соответствующих меткам времени, и значения периода вращения направленной антенны запросчика формируют сигнальную нормированную к периоду вращения направленной антенны запросчика последовательность  приведенную к положениям приемоответчика
приведенную к положениям приемоответчика  j=1, 2, …, J3, многократно моделируют нормированную к периоду вращения направленной антенны запросчика последовательность
j=1, 2, …, J3, многократно моделируют нормированную к периоду вращения направленной антенны запросчика последовательность  приведенную к положениям приемоответчика
приведенную к положениям приемоответчика  j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика, на основе расчета функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения направленной антенны запросчика последовательностей формируют оценку пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик.
j=1, 2, …, J3, для различных предполагаемых пространственных параметров запросчика, на основе расчета функции взаимной близости сигнальной и моделируемых нормированных к периоду вращения направленной антенны запросчика последовательностей формируют оценку пространственных параметров запросчика авиационных телекоммуникационных систем в условиях, когда на его запросы отвечает только один приемоответчик.
| Способ определения местоположения приёмника сигналов авиационных телекоммуникационных систем | 2019 |
|
RU2716834C1 |
| Способ определения местоположения подвижного источника радиоизлучения, передающего свои координаты с неизвестным смещением, двухпозиционной системой с высокодинамичным измерительным пунктом | 2018 |
|
RU2677852C1 |
| 0 |
|
SU163188A1 | |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2594759C1 |
| US 3860900 A, 14.01.1975 | |||
| WO 2010142768 A1, 16.12.2010. | |||

