Изобретение относится к способам посадки беспилотного летательного аппарата (БЛА) самолетного типа и может быть использовано при решении задачи обеспечения точной посадки БЛА с помощью парашюта на площадку малых размеров, таких как палуба корабля, мобильная платформа или небольшой свободный участок земной поверхности.
Известен способ посадки БЛА по-самолетному [Системы адаптивного управления летательными аппаратами. / А.С. Новоселов, В.Е. Болнокин, П.И. Чинаев, А.Н. Юрьев. - М.: Машиностроение, 1987, с. 9-10]. Для посадки БЛА по этой схеме могут использоваться обычные аэродромы пилотируемой авиации, либо оперативно развернутые посадочные полосы на подходящих участках местности (участки автомобильных дорог, горизонтальные участки местности).
Недостатком способа является то, что для посадки БЛА требуется соответствующая ровная протяженная площадка и специальное оборудование.
Известен способ посадки БЛА с использованием аэрофинишера [Системы адаптивного управления летательными аппаратами. / А.С. Новоселов, В.Е. Болнокин, П.И. Чинаев, А.Н. Юрьев. - М.: Машиностроение, 1987, с. 9-10]. Реализация этого способа также требует наличия оборудованной посадочной полосы, но более короткой, чем при посадке по-самолетному.
Известен способ посадки БЛА «Аквила» с захватом в улавливающую сеть [Системы адаптивного управления летательными аппаратами. / А.С. Новоселов, В.Е. Болнокин, П.И. Чинаев, А.Н. Юрьев. - М.: Машиностроение, 1987, с. 69-76]. Способ состоит в том, что формируют узкую секторную зону захода БЛА на посадку и задают опорную траекторию посадки, осуществляют полет БЛА по опорной траектории и посадку БЛА в улавливающую сеть.
Основным недостатком способов посадки БЛА по-самолетному, с использованием аэрофинишера и в улавливающую сеть является низкая автономность осуществления посадки, что обусловлено невозможностью реализации этих способов с любых ракурсов, применительно к малым посадочным площадкам и без обеспечивающей сложной и дорогой наземной инфраструктуры (аэродромов с посадочной полосой, курсо-глиссадного и другого сложного вспомогательного посадочного оборудования). Это существенно ограничивает допустимые условия, гибкость и оперативность применения БЛА.
Известен способ посадки БЛА с использованием парашюта [Системы адаптивного управления летательными аппаратами. / А.С. Новоселов, В.Е. Болнокин, П.И. Чинаев, А.Н. Юрьев. - М.: Машиностроение, 1987, с. 9-10]. Для реализации этого способа БЛА оснащают парашютом, выбрасываемым на этапе посадки, и надувными посадочными баллонами (подушками), располагаемыми под фюзеляжем и под крыльями и защищающими БЛА от повреждений в момент касания земли.
Основным недостатком парашютного способа является низкая точность приземления, вследствие чего для его реализации необходима посадочная площадка больших размеров, свободная от мешающих объектов, столкновение с которыми может привести к потере БЛА. Дополнительные затраты времени на поиск БЛА на значительной по площади территории и последующую эвакуацию БЛА в район старта обусловливают низкую оперативность повторного применения БЛА. Кроме того, проведение поиска и эвакуации БЛА требует привлечения дополнительной техники (транспорта), что снижает степень автономности способа.
Наиболее близким по сущности и достигаемому результату (прототипом) является способ посадки БЛА SkyRod [https://rassiandrone.ru/projects/sistema-posadki-bespilotnikov-samolrtnogo-tipa-na-korabli-platfoimy-i-drugie-podvizhnye-obekty/, дата обращения 02.04.2019]. Это способ точной посадки беспилотных летательных аппаратов самолетного типа весом до 30 кг, который заключается в том, что на этапе посадки БЛА с него спускают трос с якорем, выполняют полет таким образом, чтобы якорь зацепился за зацепное устройство, размещенное на рее, установленной горизонтально на двух высоких шестах. При успешном зацеплении якоря за зацепное устройство происходит выбрасывание парашюта для гашения скорости аппарата и его колебательных и рыскающих движений и переход БЛА на траекторию вращения на тросе вокруг реи до зависания на ней.
Известно устройство реализации данного способа [там же], состоящее из наземной части в виде двух шестов, размещенных вертикально на месте посадки БЛА, и установленной на них горизонтальной реи с зацепным устройством, а также размещаемых на борту БЛА парашюта, устройства выпускания парашюта, катушки с намотанным тросом с якорем на конце, устройства спускания троса. Причем высота шестов больше длины троса с якорем, что обеспечивает свободное вращение БЛА вокруг реи при успешном зацеплении якоря за зацепное устройство.
Применение устройства реализации способа основано на том, что на этапе посадки БЛА выводят его в направлении места посадки таким образом, чтобы проекция траектории последующего полета БЛА на зацепное устройство, размещенное на шестах на месте посадки БЛА, пересекала его, а высота полета обеспечивала зацепление спущенного с БЛА якоря за зацепное устройство. Спускают с БЛА с помощью троса якорь и совершают полет до зацепления якоря за зацепное устройство. Если зацепление не свершилось, то повторяют заход БЛА на посадку. При успешном зацеплении якоря за зацепное устройство срабатывает устройство выпускания парашюта и с БЛА выбрасывается парашют для гашения скорости аппарата, а также выключается двигатель. Беспилотный летательный аппарат переходит от горизонтального полета во вращательное движение вокруг горизонтальной реи до момента зависания на ней.
Недостатком способа и устройства его реализации являются практически невозможность безопасного применения способа для посадки БЛА с массой более 30 килограмм, а также возникающие трудности при снятии БЛА после его зависания на тросе для подготовки к следующему полету, а также зацепного устройства к посадке следующего БЛА.
Техническим результатом изобретения является обеспечение безопасной посадки БЛА массой более 30 килограмм на малую посадочную площадку с отклонением от заданной точки не более единиц метров, повышение оперативности повторного применения БЛА, а также сокращение времени подготовки места посадки для посадки следующего беспилотного летательного аппарата.
Указанный результат достигается тем, что в известном способе точной посадки беспилотного летательного аппарата самолетного типа, при котором на начальном этапе посадки БЛА осуществляют его вывод в направлении места посадки таким образом, чтобы проекция траектории последующего полета на зацепное устройство, размещенное на шестах на месте посадки, пересекала его, а высота полета обеспечивала зацепление спущенного с БЛА якоря за зацепное устройство, спускают с БЛА якорь с помощью якорного троса, понижают обороты двигателя БЛА для снижения скорости, и выполняют полет БЛА на минимально допустимой скорости до зацепления якоря за зацепное устройство, при зацеплении якоря за зацепное устройство выпускают парашют и отключают двигатель, дополнительно обеспечивают высоту полета БЛА и длину выпускаемого якорного троса более той высоты, которая требуется для безопасной посадки БЛА на парашюте, после зацепления якоря за зацепное устройство и раскрытия парашюта тянут БЛА за якорный трос, сцепленный с помощью якоря за зацепное устройство, в направлении натянутой заранее горизонтально сетки на месте посадки БЛА, сажают БЛА на натянутую сетку.
Указанный результат достигается тем, что в устройство реализации способа точной посадки беспилотного летательного аппарата самолетного типа, содержащее
бортовое оборудование в составе: парашюта, устройства выброса парашюта, бортовой катушки с якорным тросом и якоря, устройства спускания троса;
и посадочное оборудование в составе: посадочной площадки, двух шестов и зацепного устройства;
при этом
якорь закреплен на конце якорного троса,
устройство спускания якорного троса механически связано с бортовой катушкой для перевода ее во вращение по команде,
устройство выброса парашюта соединено с якорным тросом для выброса парашюта с БЛА при возникновении нагрузки со стороны якоря,
шесты, на которых размещено зацепное устройство, установлены на посадочной площадке вертикально,
причем до начала этапа посадки БЛА якорный трос с якорем на конце намотан на бортовую катушку, а парашют размещен на борту БЛА,
дополнительно в состав посадочного оборудования введены
металлический каркас и сетка размерами не менее трех максимальных размеров беспилотного летательного аппарата,
стойки высотой, обеспечивающей безопасную посадку спускаемого на парашюте БЛА на сетку,
отверстие в центре сетки диаметром не менее диаметра бортовой катушки,
лебедка,
посадочный трос,
пусковое устройство,
таймер,
электрическое питание,
два механизма уборки шестов,
устройство перемотки якорного троса,
при этом
стойки установлены вертикально на посадочной площадке,
металлический каркас с натянутой на нее сеткой закреплен горизонтально на стойках,
механизмы уборки шестов расположены на противоположных относительно центра сетки стойках и механически соединены с шестами,
шесты установлены на механизмы уборки шестов и сделаны гибкими, а верхние концы выполнены U-образными,
лебедка, пусковое устройство и устройство перемотки якорного троса закреплены на посадочной площадке, причем лебедка и пусковое устройство установлены под отверстием в сетке, а устройство перемотки якорного троса так, чтобы его ось была параллельна оси лебедки без смещения,
причем пусковое устройство выполнено в виде тумблера с рычажком и соединено с таймером для его запуска,
механизмы вращения лебедки и уборки шестов через управляемые контакты таймера соединены с электрическим питанием,
бортовая катушка выполнена легкосъемной,
при этом зацепное устройство состоит из
намотанного на лебедку посадочного троса, свободный конец которого выполнен в виде самозатягивающейся петли, натянутой через отверстие в сетке между рычажком пускового устройства и верхними концами вертикальных шестов.
Сущность изобретения заключается в следующем.
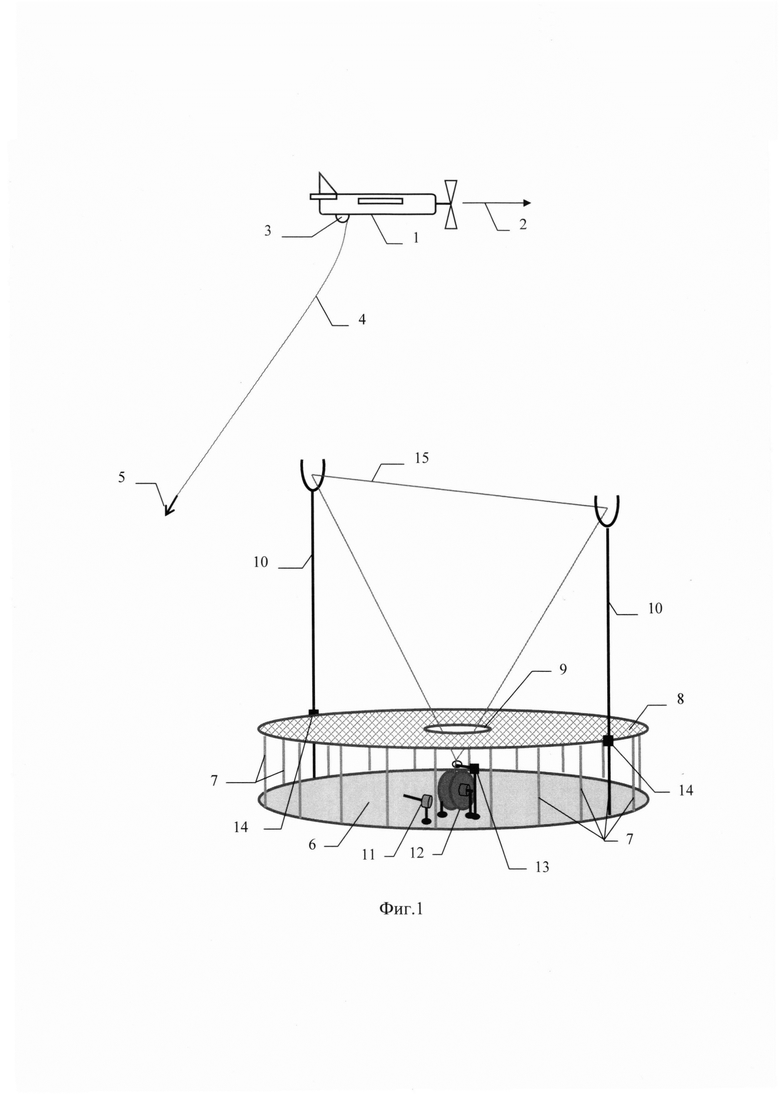
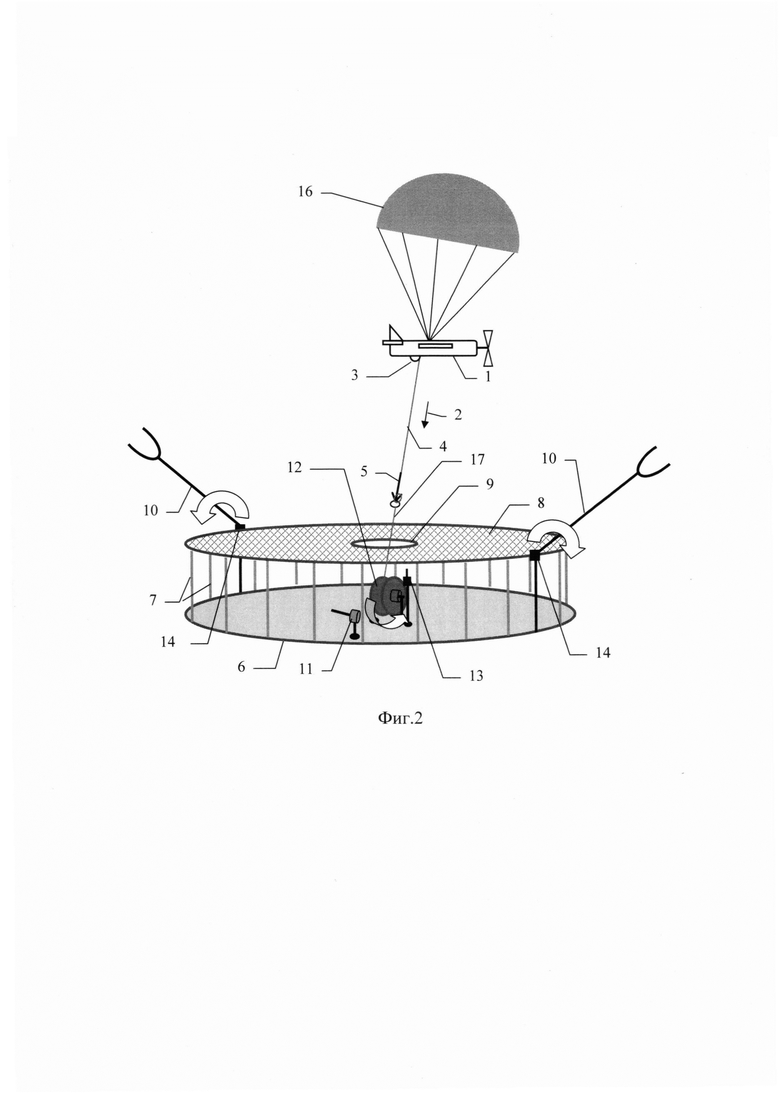
На фиг.1 представлена схема устройства реализации предлагаемого способа точной посадки БЛА самолетного типа до момента зацепления якоря за зацепное устройство, на фиг.2 - после сцепления посадочного троса с якорным тросом.
На фигурах обозначены:
1 - БЛА; 2 - вектор скорости БЛА; 3 - бортовая катушка; 4 - якорный трос; 5 - якорь; 6 - посадочная площадка; 7 - стойки; 8 - сетка, натянутая на каркас; 9 - отверстие в сетке; 10 - гибкие шесты; 11 - устройство перемотки якорного троса; 12 - лебедка; 13 - пусковое устройство; 14 - механизмы уборки шестов; 15 - петля посадочного троса; 16 - парашют, 17 - посадочный трос.
Посадочная площадка 6 служит для установки на ней стоек 7, устройства перемотки якорного троса 11, лебедки 12 и пускового устройства 13.
Стойки 7 предназначены для закрепления на них металлического каркаса, на которую натянута сетка 8. При этом из них две противоположно стоящие относительно центра сетки 8 стойки 7 служат для размещения на них механизмов уборки шестов 14.
Сетка 8 предназначена для компенсации дополнительной скорости снижения БЛА 1, возникающей при подтягивании его к посадочной площадке 6.
Отверстие 9 в сетке 8 служит для пропускания через нее посадочного троса 17 с петлей 15 при подготовке и посадке БЛА 1, а также бортовой катушки 3 после посадки БЛА 1.
Гибкие шесты 10 предназначены для натяжения между их верхними концами и пусковым устройством 13 самозатягивающейся петли 15 при подготовке к посадке БЛА 1 и первоначального погашения скорости БЛА 1 при зацеплении якоря 5 за петлю 15.
Устройство перемотки якорного троса 11 служит для перемотки после посадки БЛА 1 якорного троса 4, сцепленного с посадочным тросом 17, с лебедки 12 обратно на снятую с БЛА 1 бортовую катушку 3, чтобы разъединить тросы 4 и 17.
Лебедка 12 с механизмом вращения предназначена для подтягивания БЛА 1 путем намотки на нее сцепленных с помощью якоря 5 и петли 15 посадочного троса 17 и якорного троса 4.
Пусковое устройство 13 служит для натяжения петли 15 посадочного троса 17 до начала посадки БЛА 1, а после сцепления посадочного троса 17 с якорным тросом 4 (фиг.2) и их натяжения - приведения в действие через таймер механизмов вращения лебедки 12 и уборки шестов 14.
Механизмы уборки шестов 14 служат для своевременной уборки шестов 10 и безопасной посадки БЛА 1 на сетку 8.
Посадочный трос 17 с самозатягивающейся петлей 15 на конце предназначен для сцепления с помощью якоря 5 с якорным тросом 4 и подтягивания БЛА 1 на сетку 8.
Парашют 16 предназначен для безопасной посадки БЛА 1.
Принцип действия устройства, реализующего способ точной посадки БЛА, состоит в следующем.
Как видно из фиг.1, изначально предполагается, что до начала посадки БЛА 1 подготавливается посадочное оборудование, а именно: шесты 10 устанавливают вертикально; рычажок тумблера пускового устройства 13 переводят в горизонтальное положение; натягивают петлю 15 посадочного троса 17 между рычажком тумблера пускового устройства 13 и U-образными концами шестов 10.
На начальном этапе посадки БЛА 1 выводится (оператором вручную или автоматически по заложенной программе) на такой маршрут полета, чтобы проекции последующего полета БЛА 1 и натянутой между шестами 10 петли 15 пересекались, а высота полета над площадкой 6 была достаточной для раскрытия парашюта 16 и безопасной посадки БЛА 1.
Перед началом посадки по команде оператора или программно на борту БЛА 1 для уменьшения его скорости понижаются обороты двигателя и запускается устройство спускания якорного троса 4, начинает вращаться бортовая катушка 3 и разматываться якорный трос 4. С БЛА 1 спускается якорь 5 на длину L (H<L<H+h, где Η - высота полета БЛА 1, h - совместная высота гибкого шеста 10 и стойки 7) и выполняется полет по заданному маршруту до зацепления якоря 5 за натянутую между верхними концами шестов 10 и пусковым устройством 13 петлю 15 посадочного троса 17.
При зацеплении якоря 5 за петлю 15 якорный трос 4 натягивается, что приводит к срабатыванию устройства выброса парашюта, который выбрасывает парашют 16 и выключает двигатель БЛА 1. БЛА 1 продолжает по инерции горизонтальное движение, якорный трос 4 все сильнее стягивает петлю 15, гибкие шесты 10, на которые накинута петля 15, начинают прогибаться и гасить кинетическую энергию БЛА 1 (скорость движения) пока петля 15 не соскочит с шестов 10. Выброшенный парашют 16, раскрываясь, также тормозит горизонтальное движение БЛА 1. При дальнейшем натяжении якорного троса 4 самозатягивающаяся петля 15, сцепленная с тросом 4 с помощью якоря 5, продолжает затягиваться и приводит к срабатыванию пускового устройства 13, а именно, рычажок тумблера пускового устройства переходит из горизонтального в вертикальное положение освобождая петлю 15 и запуская таймер. Время задержки срабатывания таймера определяется временем, необходимым для полного стягивания петли 15 и сцепления посадочного троса 17 с якорным тросом 4, погашения горизонтальной скорости БЛА 1 и полного раскрытия парашюта 16.
После срабатывания таймера включаются механизм вращения лебедки 12 для подтягивания БЛА 1, и механизмы уборки шестов 14 для уборки шестов 10, чтобы они не мешали посадке БЛА 1 на сеть 8.
Скорость подтягивания БЛА 1 выбирается выше скорости снижения БЛА 1 на парашюте 16 без подтягивания, чтобы обеспечить посадку БЛА 1 на натянутую сетку 8.
После посадки БЛА 1 прекращается вращение оси лебедки 12, и механизм вращения лебедки 12 выключается. От БЛА 1 отсоединяют бортовую катушку 3 и убирают БЛА 1 с сетки 8 и, соответственно, с посадочной площадки 6. Снятую бортовую катушку 3, сцепленную с лебедкой 12 посадочным тросом 17 и якорным тросом 4, пропускают через отверстие 9 в сетке 8 и устанавливают в устройство перемотки якорного троса 11. Перематывают сцепленные тросы 4 и 17 с лебедки 12 на снятую бортовую катушку 3 до тех пор, пока не появится место сцепления якоря 5 с петлей 15. Расцепляют тросы 4 и 17, подготовленную бортовую катушку 3 с якорным тросом 4 и якорем 5 убирают с устройства перемотки якорного троса 11 для установки на БЛА 1. Переводят в вертикальное положение шесты 10 и во взведенное (горизонтальное) положение рычажок тумблера пускового устройства 13, натягивают освобожденную петлю 15 посадочного троса 17 между верхними концами шестов 10 и рычажком тумблера пускового устройства 13. Посадочное оборудование готово для посадки следующего БЛА.
Верхние концы шестов 10 выполнены U-образными или в виде рогатки, что позволяет легко накинуть на них петлю 15 посадочного троса 17 и освободить от них петлю 15 при натягивании вверх сцепленных тросов 4 и 17. Самозатягивающаяся петля 15 выполнена в виде кольца, привязанного к одному концу троса 17, и протянутого через него другого конца троса 17. Пусковое устройство 13 выполнено в виде тумблера с рычажком, который переключается при приложении механической нагрузки для запуска таймера.
Из вышесказанного следует, что обеспечение безопасной посадки БЛА массой более 30 кг на малую площадку обеспечивается за счет:
отказа от реи, вокруг которой начинает вращаться БЛА в способе-прототипе после зацепления якоря и наматывается якорный трос до момента зависания БЛА;
плавного снижения кинетической энергии (скорости) БЛА за счет использования гибких шестов и раскрывающегося парашюта;
подтягивания с помощью лебедки снижающегося на парашюте беспилотного летательного аппарата к центру натянутой горизонтально сетки за сцепленные якорный и посадочный тросы;
своевременной уборки гибких шестов;
приземления БЛА на натянутую сетку.
Повышение оперативности повторного применения БЛА, а также сокращение времени подготовки места посадки для посадки следующего БЛА обеспечивается за счет:
использования легкосъемной бортовой катушки;
наличия отверстия в центре сетки;
включения в состав посадочного оборудования устройства перемотки якорного троса;
соединения якорного троса БЛА и посадочного троса посредством якоря и самозатягивающейся петли.
Способ точной посадки БЛА практически реализуем и может быть осуществлен как вручную, так и автоматически. При ручной посадке уборка шестов и включение/выключение механизма лебедки может осуществляться вручную одним человеком.
Таким образом, предлагаемый способ точной посадки БЛА самолетного типа и устройство его реализации обеспечивают безопасную посадку БЛА массой более 30 килограмм на малую посадочную площадку с отклонением от заданной точки не более единиц метров, повышение оперативности повторного применения БЛА, а также сокращение времени подготовки места посадки для посадки следующего беспилотного летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОДВИЖИТЕЛЕМ И ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2014 |
|
RU2592963C2 |
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678408C1 |
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678407C1 |
| Система посадки беспилотных летательных аппаратов | 2024 |
|
RU2834064C1 |
| СПОСОБЫ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ВЗЛЕТНО-ПОСАДОЧНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2010 |
|
RU2466913C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ РАКЕТНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2718560C1 |
| ВОЗВРАЩАЕМЫЙ МНОГОРЕЖИМНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2006 |
|
RU2327604C1 |
| ВОЗВРАЩАЕМЫЙ МНОГОРЕЖИМНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ИЗМЕНЯЕМЫМ ЗАПАСОМ СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ | 2008 |
|
RU2384470C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2278060C1 |
| ВОЗВРАЩАЕМЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ТРЕХОПОРНЫМ ШАССИ | 2008 |
|
RU2408500C2 |
Группа изобретений относится к способу и устройству точной посадки беспилотного летательного аппарата (БЛА) самолетного типа. Для посадки БЛА осуществляют его вывод в направлении места посадки определенным образом, спускают с БЛА якорь с помощью якорного троса, понижают обороты двигателя БЛА для снижения скорости и выполняют полет БЛА на минимально допустимой скорости до зацепления якоря за зацепное устройство, при зацеплении якоря за зацепное устройство выпускают парашют и отключают двигатель, после зацепления якоря за зацепное устройство и раскрытия парашюта тянут БЛА за якорный трос, сцепленный с помощью якоря с зацепным устройством, в направлении натянутой заранее горизонтально сетки на месте посадки БЛА, сажают БЛА на натянутую сетку. Устройство содержит бортовое оборудование и посадочное оборудование. Бортовое оборудование содержит парашют, устройство выброса парашюта, бортовую катушку с якорным тросом и якорем, закрепленным на конце троса, устройство спускания троса. Посадочное оборудование содержит посадочную площадку с установленными вертикально на ней стойками, сетку, натянутую на каркас и имеющую отверстие, два гибких шеста, устройство перемотки якорного троса, лебедку, пусковое устройство, механизмы уборки шестов, посадочный трос. Обеспечивается повышение безопасности посадки БЛА, повышение оперативности повторного применения БЛА. 2 н.п. ф-лы, 2 ил.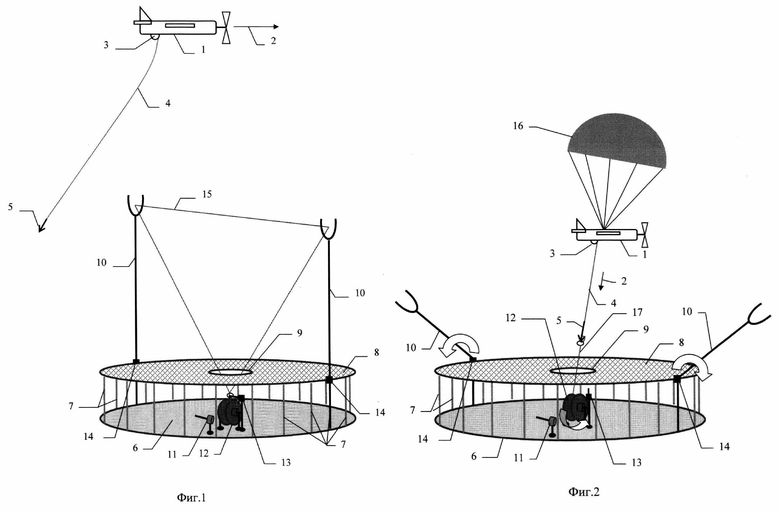
1. Способ точной посадки беспилотного летательного аппарата самолетного типа, при котором на начальном этапе посадки БЛА осуществляют его вывод в направлении места посадки таким образом, чтобы проекция траектории последующего полета на зацепное устройство, размещенное на шестах на месте посадки, пересекала его, а высота полета обеспечивала зацепление спущенного с БЛА якоря за зацепное устройство, спускают с БЛА якорь с помощью якорного троса, понижают обороты двигателя БЛА для снижения скорости и выполняют полет БЛА на минимально допустимой скорости до зацепления якоря за зацепное устройство, при зацеплении якоря за зацепное устройство выпускают парашют и отключают двигатель, отличающийся тем, что обеспечивают высоту полета БЛА и длину выпускаемого якорного троса более той высоты, которая требуется для безопасной посадки БЛА на парашюте, после зацепления якоря за зацепное устройство и раскрытия парашюта тянут БЛА за якорный трос, сцепленный с помощью якоря с зацепным устройством, в направлении натянутой заранее горизонтально сетки на месте посадки БЛА, сажают БЛА на натянутую сетку.
2. Устройство точной посадки беспилотного летательного аппарата самолетного типа, содержащее бортовое оборудование в составе: парашюта, устройства выброса парашюта, бортовой катушки с якорным тросом и якоря, устройства спускания троса; и посадочное оборудование в составе: посадочной площадки, двух шестов и зацепного устройства; при этом якорь закреплен на конце якорного троса, устройство спускания якорного троса механически связано с бортовой катушкой для перевода ее во вращение по команде, устройство выброса парашюта соединено с якорным тросом для выброса парашюта с БЛА при возникновении нагрузки со стороны якоря, шесты, на которых размещено зацепное устройство, установлены на посадочной площадке вертикально, причем до начала этапа посадки БЛА якорный трос с якорем на конце намотан на бортовую катушку, а парашют размещен на борту БЛА, отличающееся тем, что в состав посадочного оборудования введены металлический каркас и сетка размерами не менее трех максимальных размеров беспилотного летательного аппарата, стойки высотой, обеспечивающей безопасную посадку спускаемого на парашюте БЛА на сетку, отверстие в центре сетки диаметром не менее диаметра бортовой катушки, лебедка, посадочный трос, пусковое устройство, таймер, электрическое питание, два механизма уборки шестов, устройство перемотки якорного троса, при этом стойки установлены вертикально на посадочной площадке, металлический каркас с натянутой на нее сеткой закреплен горизонтально на стойках, механизмы уборки шестов расположены на противоположных относительно центра сетки стойках и механически соединены с шестами, шесты установлены на механизмы уборки шестов и сделаны гибкими, а верхние концы выполнены U-образными, лебедка, пусковое устройство и устройство перемотки якорного троса закреплены на посадочной площадке, причем лебедка и пусковое устройство установлены под отверстием в сетке, а устройство перемотки якорного троса так, чтобы его ось была параллельна оси лебедки без смещения, причем пусковое устройство выполнено в виде тумблера с рычажком и соединено с таймером для его запуска, механизмы вращения лебедки и уборки шестов через управляемые контакты таймера соединены с электрическим питанием, бортовая катушка выполнена легкосъемной, при этом зацепное устройство состоит из намотанного на лебедку посадочного троса, свободный конец которого выполнен в виде самозатягивающейся петли, натянутой через отверстие в сетке между рычажком пускового устройства и верхними концами вертикальных шестов.
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678407C1 |
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОДВИЖИТЕЛЕМ И ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2014 |
|
RU2592963C2 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА НА АЭРОФИНИШЕР | 2009 |
|
RU2399560C1 |
| US 10836509 B2, 17.11.2020 | |||
| CN 211943773 U, 17.11.2020. | |||

