се 3 индуктор 4 и ротор 5 линейного асинхронного двигателя 6. Ротор 5 установлен в направляюп1их 7 с возможностью перемещения относительно индуктора 4 вдоль продольной оси линейного асинхронного двигателя 6 и снабжен электромагнитами 8 с подпру- жиненньши цилиндрическими полюсными наконечниками 9. На базе выключателей для ограничения перемещения ротора 5 относительно индуктора 4 при небольших выбегах выполнено устройство 13 управленця, установленное на транспортном средстве. Постоянство
1
Изобретение относится к транспортным средствам и может быть использовано для работы на горизонтальных участках и наклонных участках, например, при разработке месторождений нефти, газа на шельфе шахтным способом.
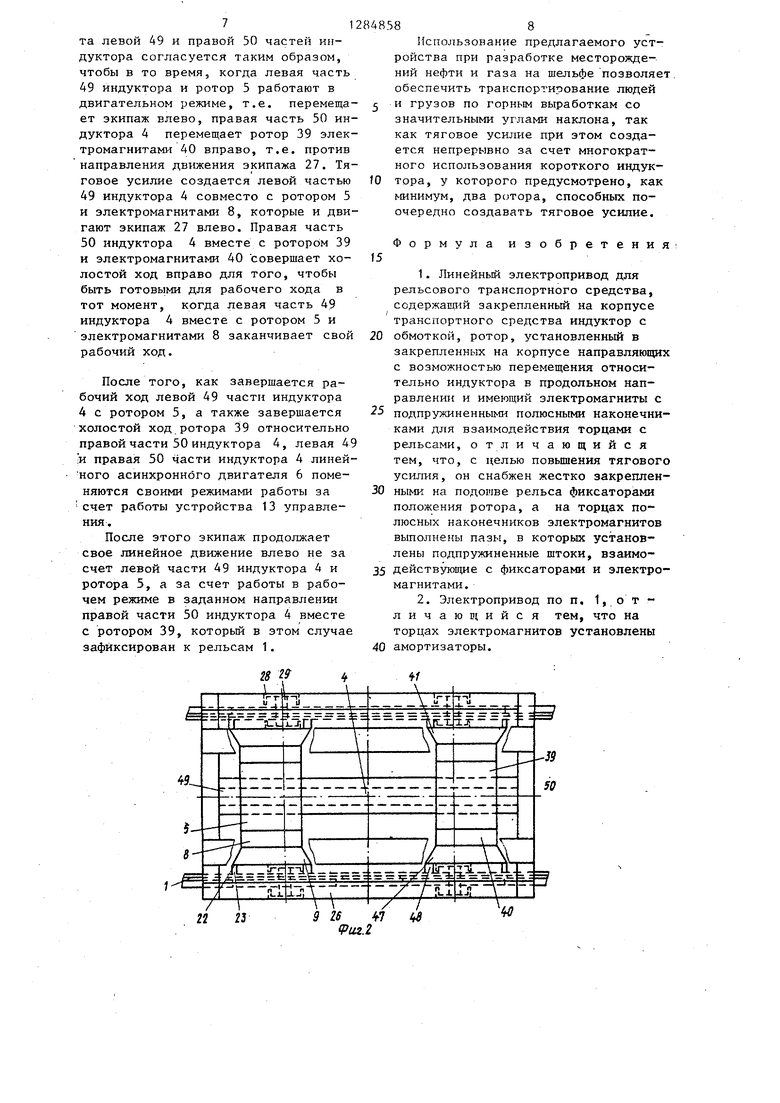
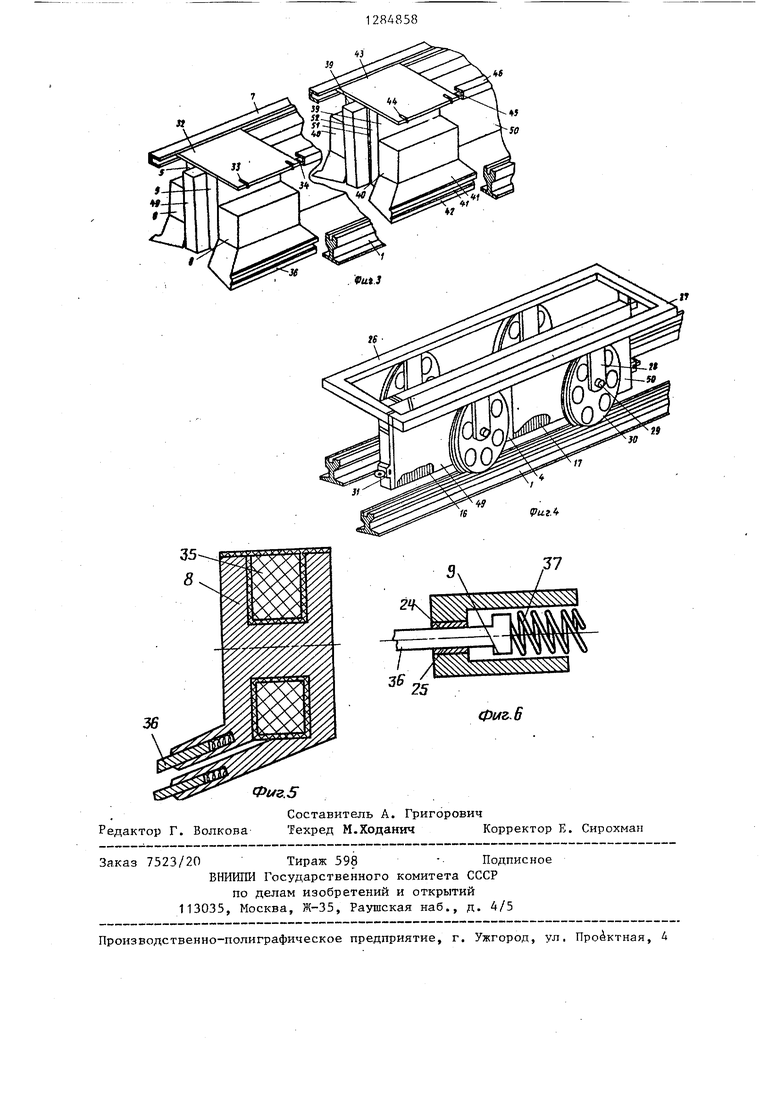
Цель изобретения - повышение тягового усилия. : На фиг. 1 схематично представлено рельсовое транспортное средство, общий вид; на-фиг.2 - то же, вид сверху; на фиг, 3 - индуктор и ротор в изометрии; на фиг, 4 - размещение кн дуктора на экипаже; на фиг, 5 - электромагнит, разрез; на фиг. 6 - полюсный наконечник, разрез.
Транспортное средство установлено на рельсы 1 путевого полотна 2 и содержит закрепленные на корпусе 3 -индуктор 4 и ротор 5 линейного асинхронного двигателя 6 и направляющие 7, в которых ротор 5 установлен с возможностью перемещения относительно индуктора 4 вдоль продольной оси линейного асинхронного двигателя 6, Ротор 5 снабжен электромагнитами 8 с подпружиненными цилиндрическими полюсными наконечниками 9, выполненными из стали. Рельсы 1 путевого полотна 2 снабжены жестко прикрепленными металлическими опорами 10 с выемками 11 в центре, обращенными в сторону подпружиненных полюсных наконечников 9.
зазора между индуктором 4 и ротором 5 обеспечивается дистанционными роликами 21. Торцы электромагнитов снабжены амортизаторами. Опорная пли та 32 обеспечивает свободное перемещение в пазу 34 по направляющей 7 ротора 5-и электромагнита 8 с катушкой постоянного тока, которая выталкивает свободные концы 36 полюсных наконечников 9 в выемки 11 опор 10 на рельсах 1 путевого полотна 2, а пружинами эти наконечники возвращаются обратно в полюсные наконечники. 1 з.п. ф-лы, 6 ил.
На транспортном средстве установлены устройства блокировки 12 и управления 13. Устройство 12 блокировки выполнено на базе блок-контактов, представляющих собой конечный выключатель.
Устройство 13 управления выполнено на базе выключателей для ограничения перемещения ротора 5 относително индуктора 4 при небольших выбегах а для определения размеров хода ротора 5 относительно индуктора 4 в устройство 13 управления встроена измерительная фотокамера 14.
Многофазная обмотка 15 индуктора 4 вьтолнена состоящей из двух одинаковых равных по длине частей 16 и . 17 и уложена в кольцевые пазы 18 магни- топровода 19, вьшолненного из шихто- ванной электротехнической стали, а ротор 5 выполнен также из электротехнической стали и имеет коротко- замкнутую обмотку 20, выполненную из алюминия или медного листа,
Постоянство зазора между индуктором 4 и ротором 5 обеспечивается дистанционными роликамн 21, выполненными из износоустойчивого немагнитного материала, например из высокопрочного капрона.
Торцы 22 электромагнитов снабжены амортизаторами 23, вьтолненными из упругого износоустойчивого материала например из пластика или резины, а в отверстиях 24 с подшипниками 25 сколжения расположены полюсные наконечники 9.
Рама 26 экипажа 27 опорами 28 и полуосями 29 опирается на колеса 30 и рельсы 1 путевого полотна 2, а сцепки 31, расположенные на торцах идуктора 4, служат для соединения с другим.экипажем или вагонами желез- нодорож ного транспорта.
Опорная плита 32 с роликами 33 обеспечивает свободное перемещение в пазу 34 по направляющей 7 ротора .5 и электромагнита 8 с катушкой 35 постоянного тока, которая выталкивает свободные концы 36 полюсных нако нечников 9 в выемки 11 опор 10 на рельсах 1 путевого полотна 2, а пружинами 37 эти наконечники возвра щаютс я обратно в полюсные наконечники,
Криостат 38 служит для охлаждения катушки 35 электромагнита 8 для придания катушке 35 сверхпроводимости и увеличения силы магнитного притяжения между полюсными наконеч- никами 9 и рельсами 1 с выступами 10.
Ротор 39 с электромагнитами 4О и подпружиненными полюсными наконечниками 41 имеет ту же конструкцию, что и полюсные наконечники 9, которые своими свободными концами 42 упираются в выемки 11 опор 10 на рельсах 1 путевого полотна 2.
Ротор 39 имеет опорную плиту 43 с роликами 44 для свободного перемещения в пазу 45 направляющей 46. Электромагнит 40 имеет ту же конструкцию, что и электромагнит 8 для электромагнитной фиксации ротора 39 относительно рельса 1 путевого . полоШа 2 устройства в процессе работы..
Длина индуктора 4 линейного асин хроннного двигателя 6 определяется из соотношения
ь 2 (t + ,„ ),
где L - длина индуктора, м;
Е - длина ротора, м;
- длина шага перемещения, м. Торцы 47 электромагнитов 40 снабжены амортизаторами 48 той же кон- струкции, что и амортизаторы 23. -Ин- дуктор 4 разделен на две части: левую 49 и правую 50 со своими обмотками 16 и 17. Ротор 39 установлен с возможностью линейного перемещения
0
5 0
5
0
5
относительно индуктора 4 вдоль его продольной оси и имеет короткозамк нутую обмотку 51, выполненную, например, из медного или алюминиевого листа, прикрепленного неподвижно к внешней ферромагнитной части 52,
Устройство работает следующим образом.
Для того, чтобы движение транспортного средства быпо непрерьшным, что необходимо для движения в выработках шахт со значительными углами наклона, тяговое усилие, развиваемое линейньм асинхронным двигателем 6, является непрерывным; для чег о используются оба ротора 5 и 39 по очереди. Благодаря тому, что индуктор 4 имеет обмотку 15 многофазного тока, состоящую из двух одинаковых частей 16 и 17, создается возможность получать линейно-бегущее магнитное поле в левой 49 и правой 50 частях индуктора 4 по очереди: в начале движения включается левая часть 49 индуктора 4,.а затем, как совершится движение транспортного средства на длину шага перемещения, включается часть 50 индуктора 4, имеющего обмотку 17 многофазного тока. При этом при включении обмотки 16 в левой части 49 индуктора 4 (фиг, 4)-возникает линейно-бегущее магнитное поле, которое в 49 индуктора 4 создает тяговое усилие, в результате чего при заторможенном роторе 5 индуктор 4, вместе с ним и все транспортное средство начинает перемещаться на колесах 30 вдоль рельсов 1 путевого полотна 2, Перемещение подвижного элемента, которым является индуктор 4 вместе с рамой 26 экипажа 27, а также опор 28 с полуосями 29 и колесами 30 происходит в сторону, противоположную направлению линейно-бегущего магнитного поля части 49 индуктора 4,
о
Надежная фиксация ротора 5 к рельсам 1 осуществляется элзктромагнита- ми 8, При включении катушек 35 электромагнита 8 в сеть постоянного тока полюсные наконечники 9 своими свободными концами 36 притягиваются к рельсам 1 и занимают фиксированное ncRrio- - жение в выемках 11 опор 10, обращенных в сторону транспортного средства.
Пружины 37, соединяющие полюсные наконечники 9 с телом электромагнита 8, растягиваются. Таким образом происходит надежная фиксация ротора 5 на рельсах 1.
При применении криогенного охлаждения электромагнитов 8 и АО силы электромагнитного притяжения значительно возрастают.
Режим работы устройства, а также длина хода ротора 5 и 39 осуществляется за счет устройства 13 управления, оснащенного автоматической измерительной фотокамерой 14 с управлением от ЭВМ.
Пусть ротор 5 и ротор 39 находятся в левом крайнем положении относительно левой 49 и правой 50 частей индуктора 4 вместе со своими электромагнитами 8 и 40 (фиг. 5). При включении криостата 38 с помощью устройства 13 управления и катушек 35 : электромагнита 8 в сеть постоянного тока полюсные наконечники 9 своими свободными концами 36 притягиваются к рельсам 1 и размещаются в выемках 11 опор Ю, расположенньпс неподвижно на рельсах вдоль путевого полотна 2. Таким образом, происходит надежная фиксация ротора 5 на рельсах 1. Электромагнит 40 ротора 39 в это время обесточен и находится в левом крайнем положении части 50 индуктора 4 вблизи середины индуктора 4, поэтому ротор 39 не имеет зацепления с рельсом 1, а ротор 5 соединяется с рельсом 1 свободными концами 36 полюсных наконечников 9.
При включении обмотки 16 левой части 49 индуктора 4 образуется линейно-бегущее магнитное поле, индуктирующее ЭДС и ток в обмотке 20 ротора 5. В результате взаимодействия линейно-бегущего магнитного поля левой части 49 индуктора 4 с токами ротора 5 индуктор 4 вместе с экипажем 27 приходит в линейное движение вдоль путевого полотна 2. При этом вместе с индуктором 4, состоящим из левой 49 и правой 50 частей, на один шаг хода экипажа 27 смещается и ротор 39 вместе с электромагнитами 40, которые остаются неподвижными относительно экипажа 27, так как обесточены. В конце хода ротор 5 занимает правое крайнее положение в своей части 49 индуктора у середины индуктора 4, т.е. там, где расположен ротор 39, только слева от средней, линии индуктора 4. При этом экипа 27 перемещается влево на расстояние {i ), которое равно разности длин левой части 49 индуктора 4 и ротора 5, т.е. равно длине шага перемещения; после этого отключают
обмотку 16 левой части 49 индуктора 4 от сети трехфазного тока, а также отключают катушки 35 электромагнита 8 от сети постоянного тока. Под действием пружины 37 полюсные нако- нечники 9 втягивают внутрь электромагнитов 9. Экипаж 27 при этом двигается по инерции влево, а для того, чтобы начался новый цикл движения устройства от левой части 49 индук-
тора 4 электромагнит 8 вместе с ротором 5 возвращают по. ходу движения экипажа 27, т.е. влево. Для этого реверсируют линейно-бегущее магнитное поле левой части 49 индуктора
4 таким образом, чтобы оно двигалось) справа налево; для этого меняют местами две какие-нибудь фазы обмотки j16 части 49 индуктора 4 на клеммах питания с помощью устройства 13 управления. Под действием этого, движущегося справа налево линейно-бегу- щего магнитного поля части 49 индуктора 4, ротор 5 также приходит в линейное движение и перемещается
влево на расстояние (), равное разности длин левой части 49 индуктора 4 и ротора 5. Затем обмотку 16 левой части 49 индуктора 4 отключают от сети трехфазного тока и устройство, сделав один цикл движения, либо продолжает двигаться по инерции влево в результате завершения первого цикла движения, либо начинает второй 1Ц1КЛ движения, аналогично первому циклу, но уже после того, как такой же цикл одного хода экипаж 27 получает в результате работы правой части 50 индуктора 4.
Все устройство работает по принципу использования двух импульсов тягового усилия: от левой части 49 и затем от правой части 50 индуктора 4. Поэтому работа ротора 39 вместе с электромагнитами 40 ничем не отлнчается от работы ротора 5 с электромагнитами 8. Разница существует только во времени их включения. При этом момент отключения многофазной обмотки 16 левой части 49 индуктора
,А и момент включения многофазной обмотки 17 правой части 50 индуктора 4 совпадают.
Благодаря применению устройства блокировки 12 и управления 13, работа левой 49 и правой 50 частей индуктора согласуется таким образом, чтобы в то время, когда левая часть 49 индуктора и ротор 5 работают в двигательном режиме, т.е. перемещает экипаж влево, правая часть 50 индуктора 4 перемещает ротор 39 электромагнитами 40 вправо, т.е. против направления движения экипажа 27. Тяговое усилие создается левой частью
49индуктора 4 совместо с ротором 5 и электромагнитами 8, которые и двигают экипаж 27 влево. Правая часть
50индуктора 4 вместе с ротором 39 и электромагнитами 40 совершает холостой ход вправо для того, чтобы быть готовыми для рабочего хода в тот момент, когда левая часть 49 индуктора 4 вместе с ротором 5 и электромагнитами 8 заканчивает свой рабочий ход.
После того, как завершается рабочий ход левой 49 части индуктора 4 с ротором 5, а также завершается холостой ход ротора 39 относительно правой части 50 индуктора 4, левая 49 и правая 50 части индуктора 4 линей- ного асинхронного двигателя 6 поменяются своими режимами работы за счет работы устройства 13 управления.
После этого экипаж продолжает свое линейное движение влево не за счет левой части 49 индуктора 4 и ротора 5, а за счет работы в рабочем режиме в заданном направлении правой части 50 индуктора 4 вместе с ротором 39, который в этом случае зафиксирован к рельсам 1.
Использование предлагаемого устройства при разработке месторождений нефти и газа на шельфе позволяет. обеспечить транспортирование людей и грузов по горным выработкам со значительными углами наклона, так как тяговое усилие при этом создается непрерывно за счет многократного использования короткого индуктора, у которого предусмотрено, как минимум, два ритора, способных поочередно создавать тяговое усилие.
Формула изобретения
1.Линейный электропривод для рельсового транспортного средства, содержасгнй закрепленный на корпусе транспортного средства индуктор с
обмоткой, ротор, установленный в
закрепленных на корпусе направляющих с возможностью перемещения относительно индуктора в продольном направлении и имеющий электромагниты с подпружиненными полюсными наконечниками для взаимодействия торцами с рельсами, отличающийся тем, что, с целью повышения тягового усилия, он снабжен жестко закрепленными на подошве рельса фиксаторами положения ротора, а на торцах полюсных наконечников электромагнитов выполнены пазы, в которых установлены подпружиненные штоки, взаимодействующие с фиксаторами и электромагнитами.
2.Электропривод по п. 1, о т - личающийся тем, что на торцах электромагнитов установлены
амортизаторы.
м
Я
Фиг. 5
Iff
фиъ.6
Редактор Г. Волкова
Составитель А. Григорович
Техред М.Ходанич Корректор Е. Сирохман
Заказ 7523/20 Тираж 598 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, Д
| название | год | авторы | номер документа |
|---|---|---|---|
| Рельсовое транспортное средство | 1983 |
|
SU1111235A1 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОЙ ПОДВЕСКИ И ТЯГИ ЭКИПАЖА ТРАНСПОРТНОГО СРЕДСТВА | 1982 |
|
SU1145585A1 |
| Транспортная система на магнитной подвеске | 1987 |
|
SU1431221A1 |
| Устройство для транспортирования грузов | 1980 |
|
SU948723A1 |
| Транспортное средство на магнитной подвеске | 1979 |
|
SU882110A1 |
| Устройство для магнитного подвешивания транспортного средства | 1976 |
|
SU624806A1 |
| ТРАНСПОРТНАЯ СИСТЕМА НА ЭЛЕКТРОМАГНИТНОМ ПОДВЕСЕ | 1989 |
|
RU1631887C |
| Транспортная система | 1980 |
|
SU912575A1 |
| Линейный синхронный электродвигатель | 1983 |
|
SU1169099A1 |
| ПОДВЕСНАЯ МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2219082C1 |
Линейный электропривод для рельсового транспортного средства относится к транспортным средствам, может быть использован для работы на горизонтальных и наклонных участках, например, при разработке месторождений нефти, газа на шельфе шахтным способом и обеспечивает повьшение тягового усилия. Транспортное средство содержит закрепленные на корпу38 П N 2J. 7 ГЗ о & / (Л 3(f р1Л. 
| Рельсовое транспортное средство | 1983 |
|
SU1111235A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
