Изобретение относится к области гидроакустики, а именно к способам и устройствам определения координат обнаруженных морских целей по их шумоизлучению.
Одной из актуальных практических задач гидроакустики является определение координат источника звука в пассивном режиме работы шумопеленгаторной станции (ШПС), установленной на подводной лодке (для краткости будем называть эту задачу задачей пассивного определения координат). Наибольшую остроту эта задача приобретает применительно к гидроакустическим условиям дальних зон акустической освещённости (ДЗАО), поскольку условия ДЗАО наблюдаются в большинстве глубоководных районов Мирового океана [1-3]. Причём наиболее важно определять в условиях ДЗАО дистанцию до надводных кораблей (НК), поскольку обнаружение современных подводных лодок ввиду их низкой шумности в условиях ДЗАО маловероятно [4], а НК, обладающие высокой шумностью, могут обнаруживаться не только в первой, но и в последующих ДЗАО.
Трудность определения координат источника в условиях ДЗАО объясняется тем, что известные пассивные методы определения дистанции, обзор которых приведён в [5], в этих условиях не обеспечивают нужной точности ввиду больших расстояний между источником и приёмником и малых отношений сигнал/помеха (ОСП), препятствующих измерению ряда информативных параметров сигнала, либо вообще не работоспособны. Остановимся на данном тезисе подробнее.
Потенциальная точность энергетического метода позволяет определить дистанцию, в лучшем случае, с точностью до номера ДЗАО, что для практики недостаточно. Трудность применения спектрального метода состоит в недостаточной эффективной ширине спектра сигнала, принимаемого на большом расстоянии от источника. Условием использования лучевого и вертикального разностно-дальномерного методов является высокоточное определение углов прихода в вертикальной плоскости сигнала источника, что на практике при приёме сигнала на дистанциях в сотни километров реализовать затруднительно. Скорость изменения горизонтального угла прихода сигнала (пеленга) не является информативной, поскольку на рассматриваемых дистанциях величина изменения пеленга за приемлемое время меньше погрешности пеленгования.
Рассмотрение различных подходов к решению поставленной задачи привело к выводу, что решение следует искать в особенностях распространения акустического сигнала НК в условиях ДЗАО.
На основании этого вывода была теоретически и путём математического моделирования исследована лучевая структура сигнала источника на входе приёмной антенны в условиях ДЗАО. Теоретические исследования базировались на фундаментальных положениях распространения акустического сигнала в океаническом волноводе [1]. В качестве инструмента для моделирования была использована лучевая программа расчёта поля источника акустического сигнала, входящая в состав комплекса программ [6].
Условиями возникновения ДЗАО являются [1]:
– глубина моря более 2 км;
– наличие подводного звукового канала (ПЗК);
– скорость звука на глубинах погружения источника и приёмника? должна быть меньше скорости звука у дна;
– источник или приёмник должен находиться по глубине вне ПЗК.
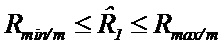
Типовое вертикальное распределение скорости звука (ВРСЗ), характерное для центральной части Тихого океана, при котором возможно появление ДЗАО, приведено на фиг.1 [2].
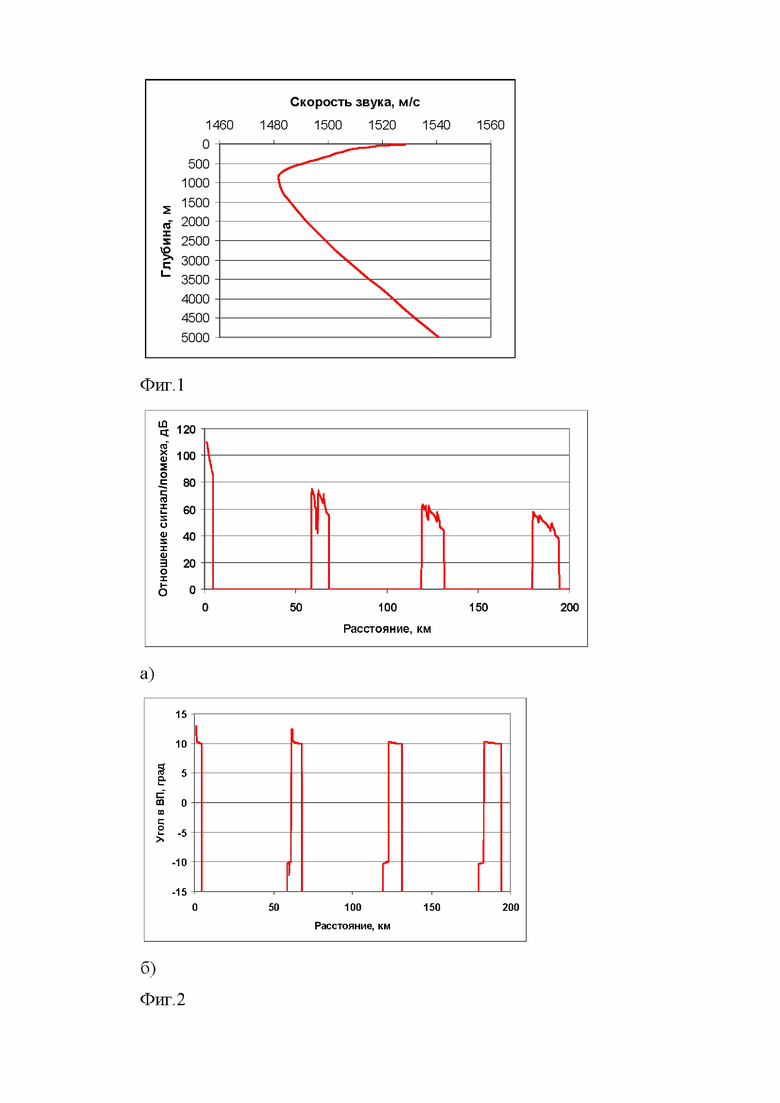
В результате проведённого исследования были установлены следующие закономерности, проиллюстрированные на фиг.2 для ВРСЗ, изображённой на фиг.1, и глубины ПЛ-носителя ШПС (далее ПЛ) 200 м: на фиг.2а приведена зависимость отношения сигнал/помеха от дистанции до НК; на фиг. 2б изображена зависимость от дистанции до НК угла в вертикальной плоскости (ВП) прихода максимальной энергии его сигнала.
1) Уровень сигнала приповерхностного источника, которым является НК, приходящего из каждой последующей ДЗАО, подчиняется цилиндрическому закону распространения сигнала [1]. Протяжённость ДЗАО возрастает с увеличением её номера (фиг.2а).
2) При нахождении приповерхностного источника звука в любой ДЗАО на вход приёмной антенны ШПС приходит 2 группы сигнальных лучей, одна из которых имеет положительные углы скольжения, другая – отрицательные. На большей части ДЗАО основную энергию сигнала несут лучи с положительными углами скольжения. Но что особенно важно, при вхождении цели в ДЗАО путём пересечения её ближней границы максимум энергии её сигнала приходит на антенну по лучам с отрицательными углами скольжения, а при вхождении цели в ДЗАО путём пересечения её дальней границы – по лучам с положительными углами скольжения (фиг.2б).
3) Расстояния от ПЛ до границ каждой ДЗАО, а также до точки внутри каждой ДЗАО, в которой угол в вертикальной плоскости прихода максимума энергии сигнала изменяет знак на противоположный, поддаются точному расчёту с использованием лучевой программы расчёта поля источника акустического сигнала. Для этого надо знать ВРСЗ и глубины источника и ПЛ.
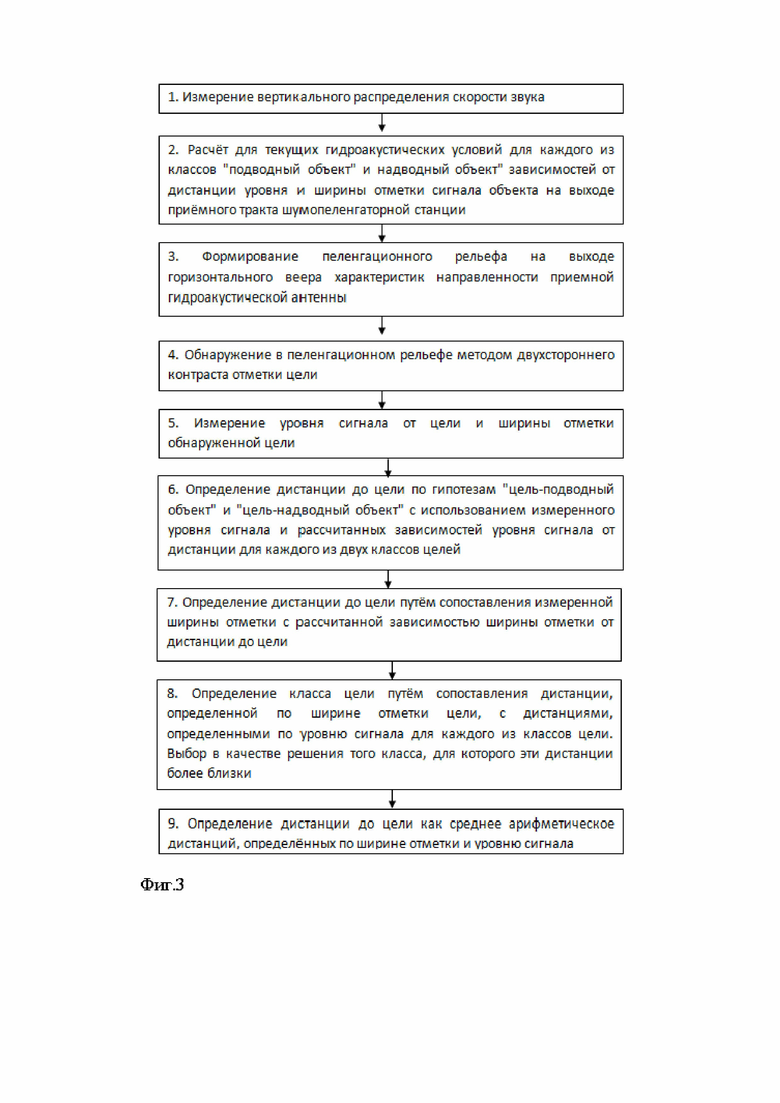
В качестве способа-прототипа выберем изобретение [7]. На фиг.3 приведена его блок-схема.
Недостатком способа-прототипа является недостаточно высокая точность определения дистанции до цели, которая в условиях ДЗАО позволяет определить только номер ДЗАО, в котором находится НК. При обнаружении НК в ДЗАО, и не зная, с ближней или дальней границы осуществлён вход в ДЗАО, предельная погрешность определения дистанции до НК равна ширине ДЗАО, которая составляет более 10 км для 1-й ДЗАО и пропорционально возрастает для последующих ДЗАО.
Решаемая техническая проблема – повышение эксплуатационных характеристик шумопеленгаторной станции.
Достигаемый технический результат – повышение точности определения дистанции до НК в условиях ДЗАО.
Указанный технический результат достигается за счёт использования описанной выше установленной закономерности поведения угла в вертикальной плоскости прихода максимума энергии сигнала приповерхностного источника звука.
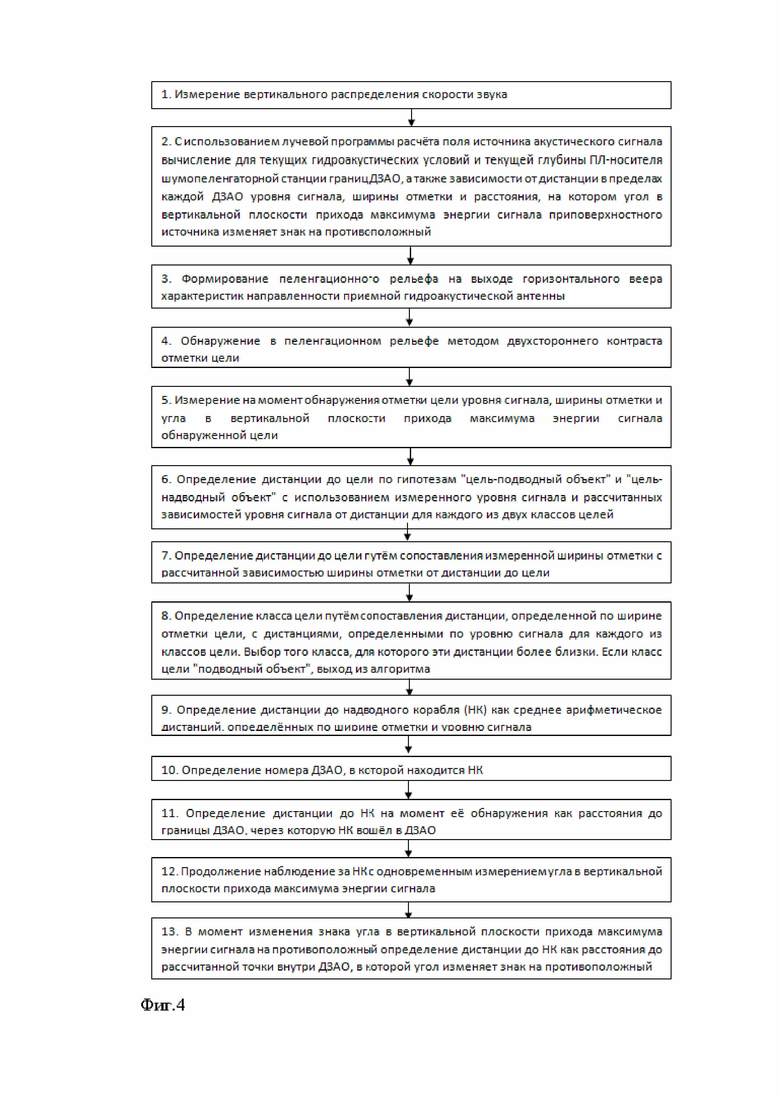
Существо способа поясняется фиг.4, на котором приведена блок-схема алгоритма действий, реализующего заявляемый способ.
Существенными признаками заявляемого способа являются:
1) Вычисление с использованием лучевой программы расчёта поля источника акустического сигнала для текущих гидроакустических условий и текущей глубины ПЛ дистанции от ПЛ до ближней 




2) Измерение в момент обнаружения цели угла в вертикальной плоскости 
3) Определение номера 


где



4) Определение дистанции до НК 

где

Смысл формулы (2) заключается в том, что, если в момент обнаружения цели измеренный угол в вертикальной плоскости прихода максимума энергии сигнала меньше нуля, то цель находится на ближней границе ДЗАО, и дистанция до неё от ПЛ равна вычисленному расстоянию до ближней границы ДЗАО. Если же этот угол положительный, то цель находится на дальней границе ДЗАО, и дистанция до неё равна вычисленному расстоянию до дальней границы ДЗАО.
Предельная погрешность оценки дистанции 
5) Продолжение в блоке 12 наблюдения за целью с одновременным измерением угла в вертикальной плоскости 
6) Определение в блоке 13 момента времени 



Предельная погрешность оценки
Рассмотрим типовой пример. Находясь в центральной части Тихого океана, ПЛ с использованием штатного измерителя скорости звука измеряет ВРСЗ. Результат измерения приведён на фиг.1. Маневрируя на глубине 200 м, ПЛ обнаруживает шумящую цель, фактическая дистанция до которой 113,3 км. На момент обнаружения цели измеряют уровень сигнала, ширину отметки и угол 


Таблица
По формуле (1) определяют, что НК находится во 2-й ДЗАО. По формуле (2) с учётом того, что измеренный угол
Продолжая, наблюдение за целью, фиксируют время, когда знак угла 
Таким образом, ошибка оценки дистанции до НК составила:
– способом-прототипом 127,3-113,3=14,0 км;
– заявляемым способом в момент обнаружения НК 119,1-113,3=5,8 км;
– заявляемым способом в процессе наблюдения за НК не более 2 км.
Реализуемость заявляемого способа и указанные точности определения дистанции проверены экспериментально.
Таким образом, заявленный технический результат – повышение точности определения дистанции до НК в условиях ДЗАО, – можно считать достигнутым.
Источники информации:
1. Акустика океана под ред. Л.М.Бреховских // М.: Наука, 1974.
2. Климатические характеристики скорости звука в северной части Тихого океана // М.: Московское отделение Гидрометеоиздата, 1981.
3. Климатические характеристики скорости звука в северной части Атлантического океана // М.: Московское отделение Гидрометеоиздата, 1984.
4. Лободин И.Е., Машошин А.И. О возможности обнаружения современных подводных лодок в дальних зонах акустической освещённости // Морская радиоэлектроника. 2019. № 3 (69). С.44-47.
5. Машошин А.И. Синтез оптимального алгоритма пассивного определения дистанции до цели // Морская радиоэлектроника, 2012, № 2 (40), с. 30-34.
6. Свидетельство о государственной регистрации программы для ЭВМ "Гидроакустические расчёты для станции шумопеленгования" № 2021616671 от 26.04.2021.
7. Патент РФ № 2681432.
8. Микушин И.И., Серавин Г.Н. Методы и средства измерения скорости звука в море // СПб.: Судостроение, 2012, 224 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат шумящих объектов с использованием вертикально развитых опускаемых разворачивающихся звукопрозрачных антенн гидроакустических комплексов | 2024 |
|
RU2831710C1 |
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681526C1 |
| Способы определения координат морской шумящей цели | 2023 |
|
RU2812119C1 |
| Способы определения координат морской шумящей цели | 2022 |
|
RU2797161C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681432C1 |
| Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной | 2024 |
|
RU2838637C1 |
| Способ пассивного определения координат шумящего в море объекта | 2021 |
|
RU2764386C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОДВОДНОЙ ШУМНОСТИ КОРАБЛЯ-ЦЕЛИ | 1989 |
|
SU1840512A1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |
Изобретение относится к способу определения дистанции до надводного корабля в условиях дальних зон акустической освещённости по данным шумопеленгаторной станции, установленной на подводной лодке. Для этого производят измерение вертикального распределения скорости звука определенным образом, формируют пеленгационный рельеф с помощью гидроакустической антенны, обнаруживают отметку цели, продолжают слежение за ней, определяют дистанцию до цели путем обеспечения определенных вычислений. Обеспечивается повышение точности определения дистанции. 4 ил., 1 табл.
Способ определения дистанции до надводного корабля в условиях дальних зон акустической освещённости (ДЗАО) по данным шумопеленгаторной станции (ШПС), установленной на подводной лодке, включающий измерение вертикального распределения скорости звука, c использованием лучевой программы расчёта поля источника акустического сигнала вычисление для текущих гидроакустических условий и текущей глубины носителя ШПС зависимости от дистанции уровня сигнала и ширины отметки цели, формирование пеленгационного рельефа на выходе горизонтального веера характеристик направленности приемной гидроакустической антенны, обнаружение в пеленгационном рельефе методом двухстороннего контраста отметки цели, измерение на момент обнаружения отметки цели уровня сигнала и ширины отметки сигнала обнаруженной цели, определение дистанции до цели по гипотезам "цель - подводный объект" и "цель - надводный объект" с использованием измеренного уровня сигнала и рассчитанных зависимостей уровня сигнала от дистанции для каждого из двух классов целей, определение дистанции до цели путём сопоставления измеренной ширины отметки с рассчитанной зависимостью ширины отметки от дистанции до цели, определение класса цели путём сопоставления дистанции, определенной по ширине отметки цели, с дистанциями, определенными по уровню сигнала для каждого из классов цели, выбор того класса, для которого эти дистанции более близки, определение дистанции до цели 







где


продолжают наблюдать за целью с одновременным измерением угла в вертикальной плоскости прихода максимума энергии сигнала, в момент изменения знака угла в вертикальной плоскости прихода максимума энергии сигнала на противоположный принимают в качестве дистанции до цели расстояние 

| Система шумопеленгования гидроакустического комплекса подводной лодки | 2020 |
|
RU2735630C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ (ПЕЛЕНГА И ДИСТАНЦИИ) И ПАРАМЕТРОВ ДВИЖЕНИЯ (КУРСА И СКОРОСТИ) МОРСКОЙ ШУМЯЩЕЙ ЦЕЛИ | 2017 |
|
RU2649887C1 |
| US 20210302556 A1, 30.09.2021 | |||
| DE 10130460 C2, 30.04.2003. | |||

