Изобретение относится к области техники и информатики, а более конкретно - к способу предсказания состояния технической системы на основе разностных функций.
Настоящее изобретение может найти применение при создании, эксплуатации и управлении систем различного назначения, включая сложные технические системы, в которых интегрированы ресурсы различного назначения и архитектуры, используемые в энергетике, машиностроении, коммунальном и сельском хозяйстве, медицине и других отраслях.
В основу настоящего изобретения положена задача создания такого способа предсказания состояния технической системы, который позволил бы объективно оценивать и прогнозировать состояние технической или технологической системы, используя математический аппарат разностных функций и уравнений, позволял бы достигать оптимального функционирования системы ее агрегатов и подсистем, оценивать возможные последствий изменения параметров системы и управляющих ею процессов при различных, включая большие, управляющих воздействиях. Применение аппарата разностей для предсказания обосновано тем, что контроль и мониторинг состояния технической системы производится в некоторые моменты времени и оцениваются изменения ее состояния от одного момента времени к другому, а изменения характеризуются разностями значений.
Обыкновенное разностное уравнение устанавливает связь между значениями функции Y=Y(x), рассматриваемой для ряда равноотстоящих значений аргумента х. При этом можно без ограничения общности считать, что искомая функция определена для равноотстоящих значений аргумента с шагом, равным единице. Таким образом, если начальное значение аргумента есть x, то ряд его равноотстоящих значений будет x, х+1, х+2,… и в обратном направлении: x, х-1, х-2,…. Соответствующие значения функции будем обозначать Yx, Yx+l, Yx+2,… или Yx, Yx-1, Yx-2.
Наиболее близким к данному изобретению является «Способ измерения физической величины" (патент на изобретение №2104495, 17.10.1994), заключающийся в том, что осуществляют преобразование измеряемой физической величины в выходные сигналы N датчиков, вычисляют оптимальные параметры N фильтров и настраивают их, фильтруют выходные сигналы датчиков соответствующими фильтрами и получают значение измеренной физической величины суммированием отфильтрованных сигналов, отличающийся тем, что вычисляют N разностей выходных сигналов датчиков, образующих попарно неповторяющиеся совокупности, причем каждый выходной сигнал используют при вычислении упомянутых разностей не менее двух раз, одновременно вычисляют корреляционные функции разностных сигналов для q априорно заданных интервалов корреляции, по ним определяют q параметров априорно известных корреляционных функций погрешностей преобразования.
Описанный способ можно принять за прототип. Однако этот способ имеет следующие существенные недостатки:
1. Способ относится только к разностям первого порядка и измерениям физических величин.
2. Способ не позволяет прогнозировать состояние системы, а служит только для повышения точности измерений.
3. Способ использует только корреляционные функции разностных сигналов, что существенно сужает возможность его использования.
Задачи изобретения решены и недостатки прототипа устранены в заявляемом способе предсказания состояния технической системы на основе разностных функций с использованием данных о функционировании агрегатов и/или подсистем агрегатов, из которых состоит рассматриваемая техническая система, при этом данные о функционировании представлены в виде показателей в различных материальных формах в их дискретном цифровом представление и характеризуют технологические параметры системы и/или ее подсистем, и предусматривающий следующие стадии:
1) накапливают данные о функционировании в виде показателей в различных материальных формах в их дискретном цифровом представление о функционировании агрегатов и/или подсистем агрегатов и передают их эксперту;
2) эксперт на основе выбора методов построения моделей функционирования отдельных агрегатов и/или подсистем агрегатов, и/или системы в целом и показателей функционирования, либо их подмножества выбирает по меньшей одну из моделей функционирования отдельных агрегатов и/или подсистем агрегатов, и/или системы в целом, допускающую представление в виде разностного уравнения или функции;
3) эксперт исходя из данных, полученных на стадиях 1 и 2 получает аппроксимацию показателей в их дискретном цифровом представление о функционировании агрегатов и/или подсистем агрегатов к разностной функции, таким образом, что она принимает значения показателей в реальные или условные моменты времени.
4) в процессе функционирования отдельных агрегатов и сложных технологических комплексов, состоящих из отдельных агрегатов и/или подсистем агрегатов получают текущие показатели функционирования;
5) полученные текущие показатели в автоматизированном режиме сравнивают со значениями разностных уравнений, полученных на стадии 3 и необязательно получают разностные уравнения следующего порядка;
6) при помощи решения разностного уравнения прогнозируют состояние отдельных агрегатов и/или подсистем агрегатов, и/или системы в целом в следующие моменты времени, осуществляя прогнозирование;
7) полученные решения, показатели и состояния необязательно сохраняют и используют в качестве управляющих воздействий для данной или аналогичной технической системы, позволяющих достичь оптимального функционирования отдельных агрегатов и/или подсистем агрегатов, и/или системы в целом.
За счет реализации заявленного способа достигаются следующие технические результаты:
1. Возможно использовать разности не только первого, но и более высоких порядков и использовать его не только для измерения физических величин, но и для весьма широкого круга технических и технологических систем.
2. Способ позволяет эффективно прогнозировать состояние системы.
3. Способ использует не только корреляционные функции разностных сигналов, а широкий круг функций, выбираемых экспертом, что существенно расширяет возможность его использования.
Разности различных порядков функции Yx с помощью следующих формул:
Разности первого порядка
D Yx=Yx+1-Yx,
D Yx+1=Yx+2-Yx+1,
DYx+2=Yx+3-Yx+2,
… … … … …
Разности второго порядка
D2Yx=DYx+1-D Yx,
D2Yx+1=D Yx+2-DYx+1,
D2Yx+2=D Yx+3-DYx+2,
Настоящее изобретение будет раскрыто в нижеследующем примере со ссылкой на Фиг. 1-4, описывающими применение заявляемого способа.
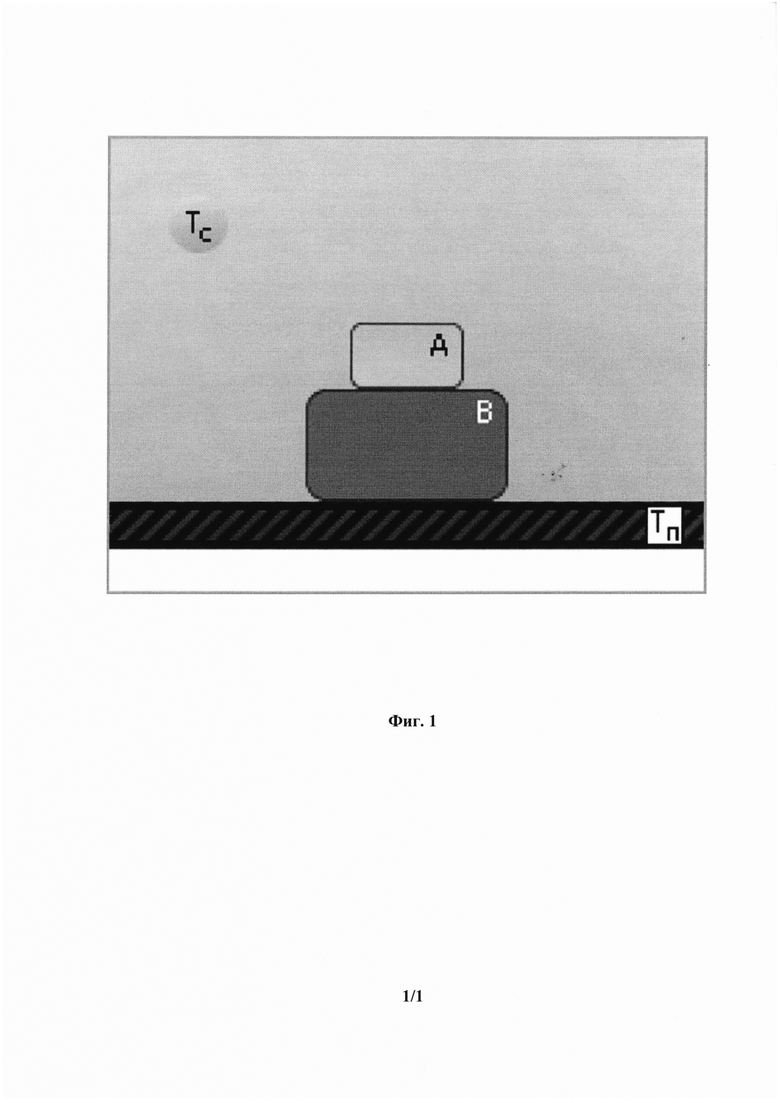
На Фиг. 1 схематически изображена система двух материальных тел А и В с различными теплофизическими свойствами. Система контактирует с опорой с температурой Тп и помещена во внешнюю среду с температурой Тс. При помощи заявляемого способа будем прогнозировать протекание процесса изменения температур тел.
Как видно, в системе изменяются (могут измениться) четыре показателя: температуры тел А, В, Тс, Тп. Значит, мы имеем дело с четырьмя переменными, зависящими от времени (поскольку переменные меняют свои значения со временем). Введем эти переменные: X1(t), X2(t), X3(t), X4(t).
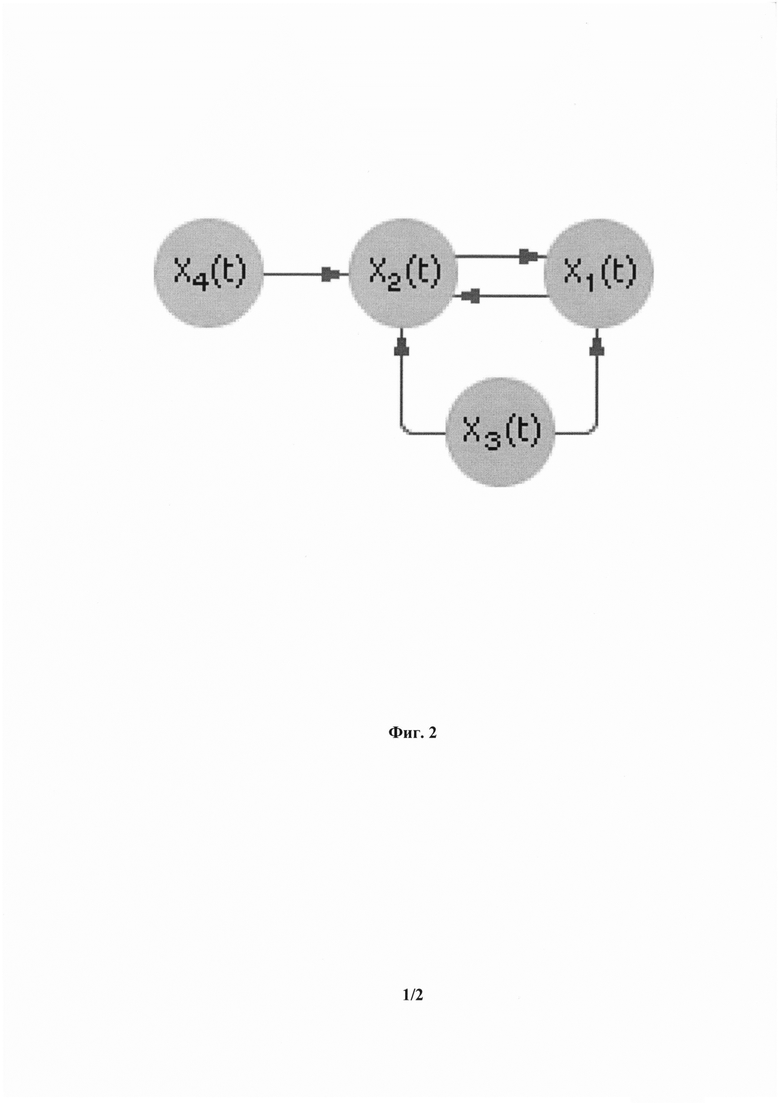
Для построения математической модели данной системы отразим процесс теплопередачи в виде графа зависимостей, показанного на Фиг. 2.
Стрелка от А к В обозначает изменение температуры X2(t) объекта В под влиянием объекта А. Понятно, что ряд стрелок (например, от В к Тс, от А к Тп и др.) отсутствует, то есть нет влияния одних параметров на другие: тело В не в состоянии сколько-нибудь существенно нагреть открытую атмосферу, а тело А - массивную и потенциально бесконечную опору. Строго говоря, такое влияние есть, но оно настолько ничтожно, что разумно им пренебречь.
Поскольку экспертом выделено четыре переменных, то необходимо, как минимум, четыре закона, описывающих их изменение. В общем виде, учитывая, от каких переменных зависит каждый показатель, получим:
- для тела А имеем зависимость температуры X1(t) от температуры тела В и температуры атмосферы Тс: dX1(t)/dt=f1(X2(t), X3(t));
- для тела В имеем зависимость температуры X2(t) от температуры тела А, температуры атмосферы Тс и опоры Тп: dX2(t)/dt=f2(X1(t), X3(t), X4(t)).
Стрелки, входящие в соответствующий кружок, указывают на количество влияющих параметров, а то, откуда они исходят, определяет конкретные названия переменных.
Для среды закон имеет вид: X3(t)=const, то есть, температура атмосферы Тс не зависит от остальных составляющих данной системы и, соответственно, не изменяется. Для опоры закон имеет вид: X4(t)=const, то есть, температура опоры Тп не зависит от остальных составляющих данной системы и, соответственно, не изменяется.
Система законов в первом приближении сформирована. Остается определить их конкретный вид: раскрыть, что из себя представляют значения выражений f1 и f2. Так как мы имеем дело с системой, зависящей от своего прошлого поведения на каждом последующем шаге, то мы применили для ее описания разностные уравнения.
Таким образом, накапливают данные о функционировании в виде показателей в различных материальных формах в их дискретном цифровом представление о функционировании системы теплопередачи тел и передают их эксперту.
Эксперт на основе выбора методов построения моделей функционирования системы в целом и показателей ее функционирования, либо их подмножества выбирает модель функционирования отдельных агрегатов и/или подсистем агрегатов, и/или системы в целом, допускающую представление в виде разностного уравнения.
В итоге модель имеет вид:
dX1(t)/dt=К21⋅(X2(t)-X1(t))+К31⋅(X3(t)-X1(t)).
В конце следует проверить размерности уравнения; размерность левой части должна совпасть с размерностью правой. Напомним только, что производная имеет размерность показателя X, деленного на единицу времени.
Теперь эксперт синтезирует аналогично второе уравнение:
dX2(t)/dt=К12⋅(X1(t)-2(t))+К32⋅(X3(t)-X2(t))+K42⋅(X4(t)-X2(t)).
Эксперт задает значения коэффициентов модели: К12=К21=0.2, К31=0.1, К32=0.05, К42=0.1. Зададим начальные условия системы (в момент времени t=0): Х1(0)=30°С, Х2(0)=70°С, Х3(0)=22°С, Х4(0)=15°С. Выбираем шаг моделирования Δt равный, например, 0.2 с. Примем конечное значение времени моделирования за Тk=4 с.
Подставим значения коэффициентов:
X1(t+Δt)=X1(t)+[0.2⋅(X2(t)-X1(t))+0.1⋅(22-X1(t))]⋅Δt
X2(t+Δt)=X2(t)+[0.2⋅(X1(t)-X2(t))+0.05⋅(22-X2(t))+0.1⋅(15-X2(t))]⋅Δt
Эксперт исходя из данных, полученных на предыдущих стадиях получает аппроксимацию показателей в их дискретном цифровом представление о функционировании агрегатов и/или подсистем агрегатов к разностной функции, таким образом, что она принимает значения показателей в реальные или условные моменты времени (приведены в таблице).
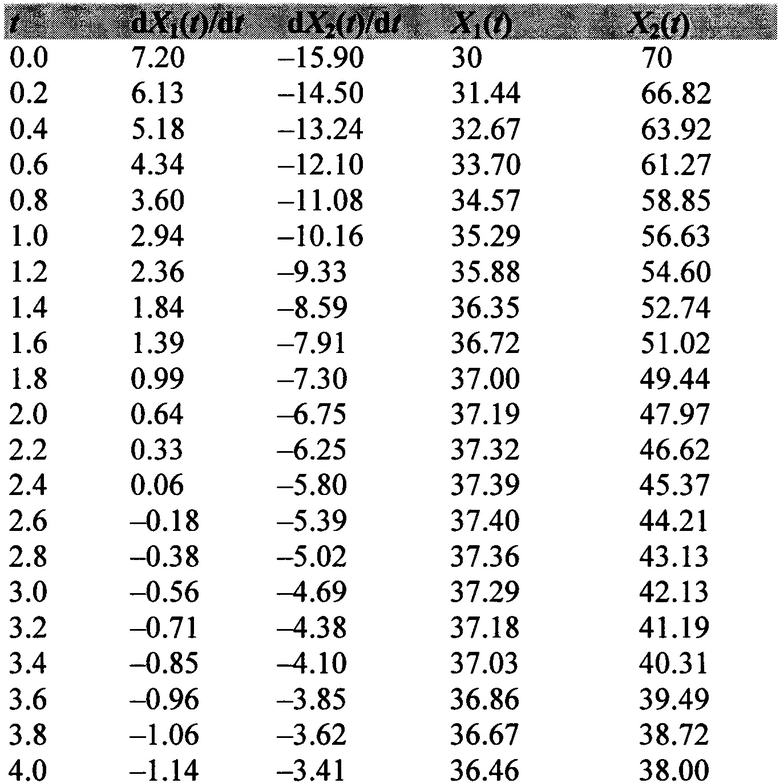
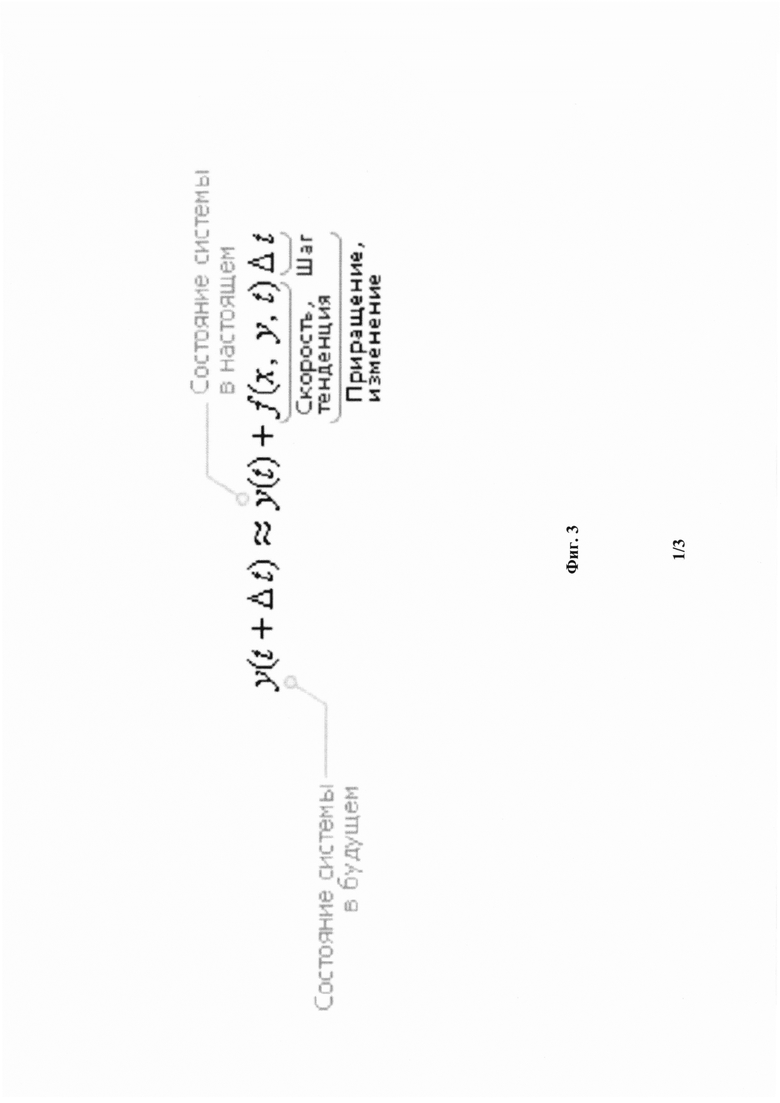
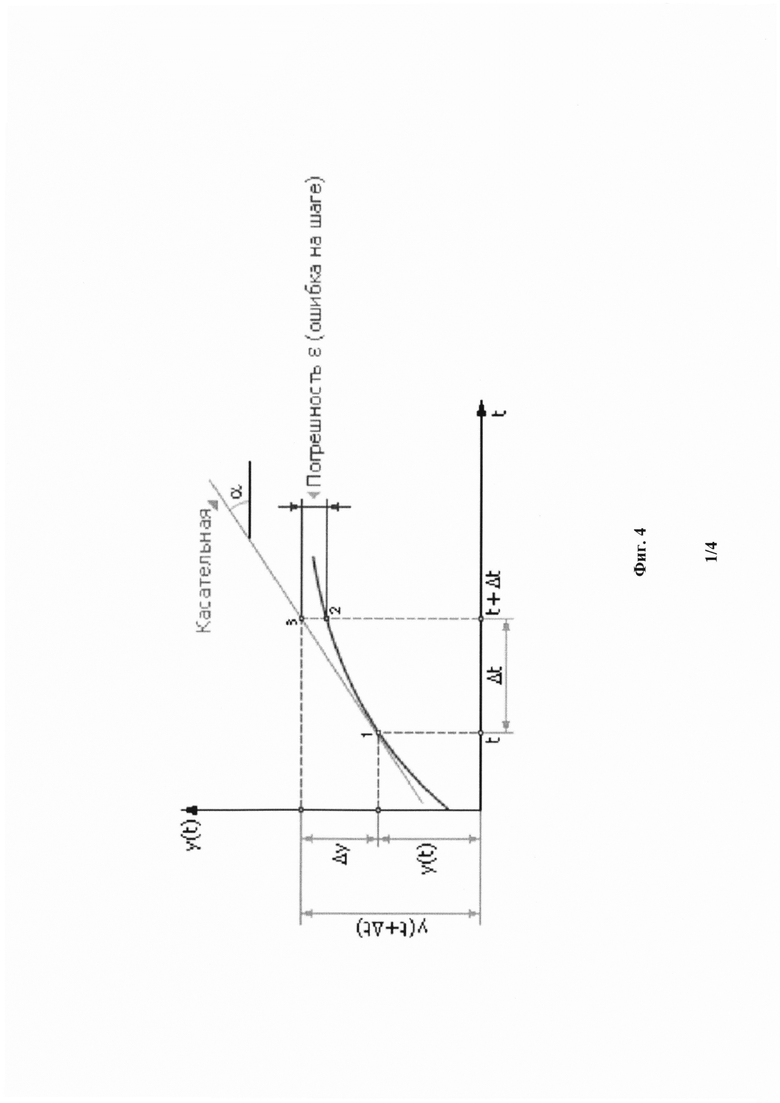
Далее эксперт при помощи решения разностного уравнения прогнозируют состояние отдельных агрегатов и/или подсистем агрегатов, и/или системы в целом в следующие моменты времени, осуществляя прогнозирование, как показано на Фиг. 3 и Фиг. 4.
По сравнению со способами, известными авторам, заявляемый способ позволяет использовать разности не только первого, но и более высоких порядков и использовать его не только для измерения физических величин, но и для весьма широкого круга технических и технологических систем, позволяет эффективно прогнозировать состояние системы и использует не только корреляционные функции разностных сигналов, а широкий круг функций, выбираемых экспертом, что существенно расширяет возможность его использования.
Изобретение относится к области техники и информатики, а более конкретно к способу предсказания состояния технической системы на основе разностных функций. Технический результат - возможность использовать разности не только первого, но и более высоких порядков, что позволяет эффективно прогнозировать состояние системы. Для этого предложен способ предсказания состояния технической системы на основе разностных функций, в котором накапливают данные о функционировании системы, на их основе выбирают метод построения модели, получают аппроксимацию показателей в их дискретном цифровом представлении, получают текущие показатели функционирования, полученные текущие показатели сравнивают со значениями разностных уравнений и получают разностные уравнения следующего порядка, прогнозируют состояние системы и используют решения, показатели и состояния в качестве управляющих воздействий. 4 ил., 1 табл.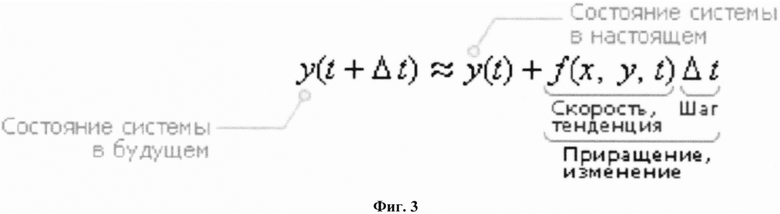
Способ предсказания состояния технической системы на основе разностных функций с использованием данных о функционировании агрегатов и/или подсистем агрегатов, из которых состоит рассматриваемая техническая система, при этом данные о функционировании представлены в виде показателей в различных материальных формах в их дискретном цифровом представлении и характеризуют технологические параметры системы и/или ее подсистем, предусматривающий следующие стадии:
1) накапливают данные о функционировании в виде показателей в различных материальных формах в их дискретном цифровом представлении о функционировании агрегатов и/или подсистем агрегатов;
2) на основе накопленных данных и выбора методов построения моделей функционирования отдельных агрегатов, и/или подсистем агрегатов, и/или системы в целом и показателей функционирования либо их подмножества выбирают по меньшей одну из моделей функционирования отдельных агрегатов, и/или подсистем агрегатов, и/или системы в целом, допускающую представление в виде разностного уравнения или функции;
3) исходя из данных, полученных на стадиях 1 и 2, получают аппроксимацию показателей в их дискретном цифровом представлении о функционировании агрегатов и/или подсистем агрегатов к разностной функции таким образом, что она принимает значения показателей в реальные или условные моменты времени;
4) в процессе функционирования отдельных агрегатов и сложных технологических комплексов, состоящих из отдельных агрегатов и/или подсистем агрегатов, получают текущие показатели функционирования;
5) полученные текущие показатели в автоматизированном режиме сравнивают со значениями разностных уравнений, полученных на стадии 3, и получают разностные уравнения следующего порядка;
6) при помощи решения разностного уравнения прогнозируют состояние отдельных агрегатов, и/или подсистем агрегатов, и/или системы в целом в следующие моменты времени, осуществляя прогнозирование;
7) полученные решения, показатели и состояния сохраняют и используют в качестве управляющих воздействий для данной или аналогичной технической системы, позволяющих достичь оптимального функционирования отдельных агрегатов, и/или подсистем агрегатов, и/или системы в целом.
| СПОСОБ ИЗМЕРЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 1994 |
|
RU2104495C1 |
| СПОСОБ АНАЛИЗА И ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ ДИНАМИЧЕСКОЙ СИСТЕМЫ И ЕЕ ОТДЕЛЬНЫХ ЭЛЕМЕНТОВ | 2000 |
|
RU2236700C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ФАЗОВОГО СОСТОЯНИЯ СУДНА | 2002 |
|
RU2221726C1 |
| WO 1997042553 A1, 13.11.1997. | |||

