Перекрестная ссылка на связанные заявки
[0001] Настоящая заявка ссылается на приоритет заявки на патент КНР №201511016979.2, зарегистрированной 29 декабря 2015 г., все содержание которой включено в данный документ путем ссылки.
Область техники
[0002] Настоящее изобретение относится к области инспекции вагонов, а в частности - к способу и системе для идентификации номера вагона и типа вагона, а также к способу и системе для проведения инспекции безопасности вагона.
Предпосылки создания изобретения
[0003] При управлении движением поездов нужно регистрировать и проверять номера вагонов. Обработка номеров вагонов вручную занимает много времени и энергии и не свободна от ошибок. Один из автоматических способов заключается в использовании RFID-меток (устройств радиочастотной идентификации). Однако этот способ отличается высокой стоимостью и не всегда может использоваться. Другой способ заключается в использовании для автоматического распознавания номера вагона цифрового изображения. При применении цифрового изображения идентификация может быть выполнена с использованием сложных вычислений, и при этом можно достигнуть относительно высокой точности. Таким образом, создание цифрового изображения стало общепринятым способом идентификации. Для распознания номера вагона с помощью цифрового изображения необходимо получить изображения боковых сторон вагонов. При наличии искажений в полученных изображениях, точность распознания номера вагона ставится под угрозу.
[0004] Таким образом, необходимо иметь надежный способ идентификации номера вагона, убирающий искажения в изображениях вагонов.
[0005] Описанная выше информация используется только для лучшего понимания предпосылок настоящего изобретения. Поэтому вышеуказанная информация может включать информацию из соответствующих областей техники, известную специалистам.
Сущность изобретения
[0006] Настоящее изобретение относится к способу и системе для идентификации типа вагона, а также к способу и системе для проведения инспекции безопасности вагонов, которые способны осуществлять автоматическую идентификацию типа вагона.
[0007] Другие признаки, особенности и преимущества настоящего изобретения станут очевидными из последующего подробного описания или частично выведены из практической реализации настоящего изобретения.
[0008] Согласно первому аспекту настоящего изобретения, предложен способ идентификации номера вагона, включающий: непрерывное фотографирование инспектируемого вагона с использованием линейного массива фотокамер, движущегося относительно инспектируемого вагона, и генерацию множества частичных изображений вагона; сшивание множества частичных изображений вагона с получением сшитого изображения; коррекцию искажений в сшитом изображении с получением скорректированного изображения; идентификацию номера вагона по скорректированному изображению; при этом коррекция искажений сшитого изображения включает: извлечение контура колеса из сшитого изображения; получение на основе указанного контура отношения между горизонтальным диаметром и вертикальным диаметром колеса; если это отношение больше первого заданного порога, сжатие сшитого изображения в горизонтальном направлении согласно этому отношению; а если отношение меньше второго заданного порога, растягивание сшитого изображения в горизонтальном направлении.
[0009] Согласно некоторым другим вариантам выполнения настоящего изобретения, модуль получения изображения получает множество частичных изображений, сфотографированных линейным массивом фотокамер с заданной частотой фотографирования.
[0010] Согласно некоторым другим вариантам выполнения настоящего изобретения, идентификация номера вагона по скорректированному изображению включает: вырезание области номера вагона в скорректированном изображении с получением изображения области номера вагона; сглаживание и цифровую обработку изображения области номера вагона; идентификацию номера вагона с использованием средства для распознавания символов; и автоматическую коррекцию идентифицированного номера вагона согласно правилу назначения номеров вагонов.
[0011] Согласно еще одному аспекту настоящего изобретения, предложена система идентификации номера вагона, содержащая: модуль получения изображения, предназначенный для получения множества частичных изображений инспектируемого вагона, которое генерируются путем непрерывного фотографирования инспектируемого вагона с использованием линейного массива фотокамер, движущихся относительно инспектируемого вагона; модуль сшивания изображений, предназначенный для сшивания множества частичных изображений вагона с формированием сшитого изображения; модуль коррекции изображения, предназначенный для коррекции искажений сшитого изображения с получением скорректированного изображения; модуль идентификации номера вагона, предназначенный для идентификации номера вагона по скорректированному изображению; при этом модуль коррекции изображения: извлекает контур колеса из сшитого изображения; получает отношение между горизонтальным диаметром и вертикальным диаметром колеса по указанному контуру; если это отношение больше первого заданного порога, сжимает сшитое изображение в горизонтальном направлении согласно этому отношению; а если это отношение меньше второго заданного порога, растягивает сшитое изображение в горизонтальном направлении.
[0012] Согласно некоторым вариантам выполнения настоящего изобретения, модуль получения изображения предназначен для получения множества частичных изображений, сфотографированных линейным массивом фотокамер с заданной частотой фотографирования.
[0013] Согласно некоторым вариантам выполнения настоящего изобретения, модуль идентификации номера вагона выполняет следующее: вырезание области номера вагона в скорректированном изображении с получением изображения области номера вагона; сглаживание и цифровую обработку изображения области номера вагона; идентификацию номера вагона с использованием средства для распознавания символов; и автоматическую коррекцию идентифицированного номера вагона согласно правилу назначения номеров вагонов.
[0014] Согласно еще одному аспекту настоящего изобретения, предложен способ идентификации типа вагона, включающий: идентификацию номера вагона; и определение типа вагона согласно номеру вагона.
[0015] Согласно некоторым вариантам выполнения настоящего изобретения, идентификация номера вагона включает идентификацию номера вагона с использованием любого из способов идентификации номера вагона, описанных выше.
[0016] Согласно некоторым вариантам выполнения настоящего изобретения, определение типа вагона согласно номеру вагона включает: поиск указанного типа в базе данных или в списке данных с использованием номера вагона.
[0017] Согласно некоторым вариантам выполнения настоящего изобретения, определение типа вагона согласно номеру вагона включает: прямое определение типа вагона по номеру вагона согласно правилу назначения номеров вагонов.
[0018] Согласно еще одному аспекту настоящего изобретения, предложена система идентификации типа вагона, содержащая: модуль идентификации номера вагона, предназначенный для идентификации номера вагона; и модуль определения типа вагона, предназначенный для определения типа вагона согласно номеру вагона.
[0019] Согласно некоторым вариантам выполнения настоящего изобретения, модуль идентификации номера вагона представляет собой любую из систем идентификации номера вагона, описанных выше.
[0020] Согласно некоторым вариантам выполнения настоящего изобретения, модуль определения типа вагона предназначен для поиска указанного типа в базе данных или в списке данных с использованием номера вагона.
[0021] Согласно некоторым вариантам выполнения настоящего изобретения, модуль определения типа вагона предназначен для прямого определения типа вагона по номеру вагона согласно правилу назначения номеров вагонов.
[0022] Согласно некоторым вариантам выполнения настоящего изобретения, тип вагона представляет собой любой из следующего: локомотив, грузовой вагон и пассажирский вагон.
[0023] Согласно некоторым вариантам выполнения настоящего изобретения, система идентификации типа вагона дополнительно содержит: модуль идентификации сцепки, предназначенный для определения мест сцепки вагонов; и модуль разделения изображения, предназначенный для разбиения изображения поезда на множество субизображений вагонов согласно положениям сцепок.
[0024] Согласно другому аспекту настоящего раскрытия, предложен способ инспекции безопасности вагона, включающий: идентификацию типа инспектируемого вагона, который входит в область инспекции, с использованием любого из способов идентификации типа вагона, описанного выше; и, если инспектируемый вагон - локомотив или пассажирский вагон, облучение инспектируемого вагона низкой дозой или необлучение инспектируемого вагона; а если инспектируемый вагон - грузовой вагон, облучение инспектируемого вагона высокой дозой облучения.
[0025] Согласно еще одному аспекту настоящего изобретения, предложена система для инспекции безопасности вагона, содержащая: любую из систем идентификации типа вагона, описанную выше; и модуль управления облучением, предназначенный для того, чтобы, согласно типу инспектируемого вагона, определенному системой идентификации типа вагона, управлять источником облучения для облучения инспектируемого вагона первой дозой или необлучения инспектируемого вагона, если инспектируемый вагон - это локомотив или пассажирский вагон, и управлять источником облучения для облучения инспектируемого вагона второй дозой, если инспектируемый вагон - грузовой вагон, при этом первая доза меньше, чем вторая доза.
[0026] Способ и система для идентификации типа вагона и способ и система для проведения инспекции безопасности вагонов, раскрытые в настоящем изобретении, способны реализовать автоматическую идентификацию типа вагона и проверку безопасности вагона и обладают такими преимуществами, как высокая производительность и легкость использования. Кроме того, способ и система согласно настоящему изобретению позволяют автоматически распознать переоборудованные транспортные средства.
Краткое описание чертежей
[0027] Ниже примеры вариантов выполнения настоящего изобретения описаны подробно со ссылками на сопровождающие чертежи. На таких чертежах вышеуказанные признаки и другие особенности и преимущества изобретения становятся более очевидными.
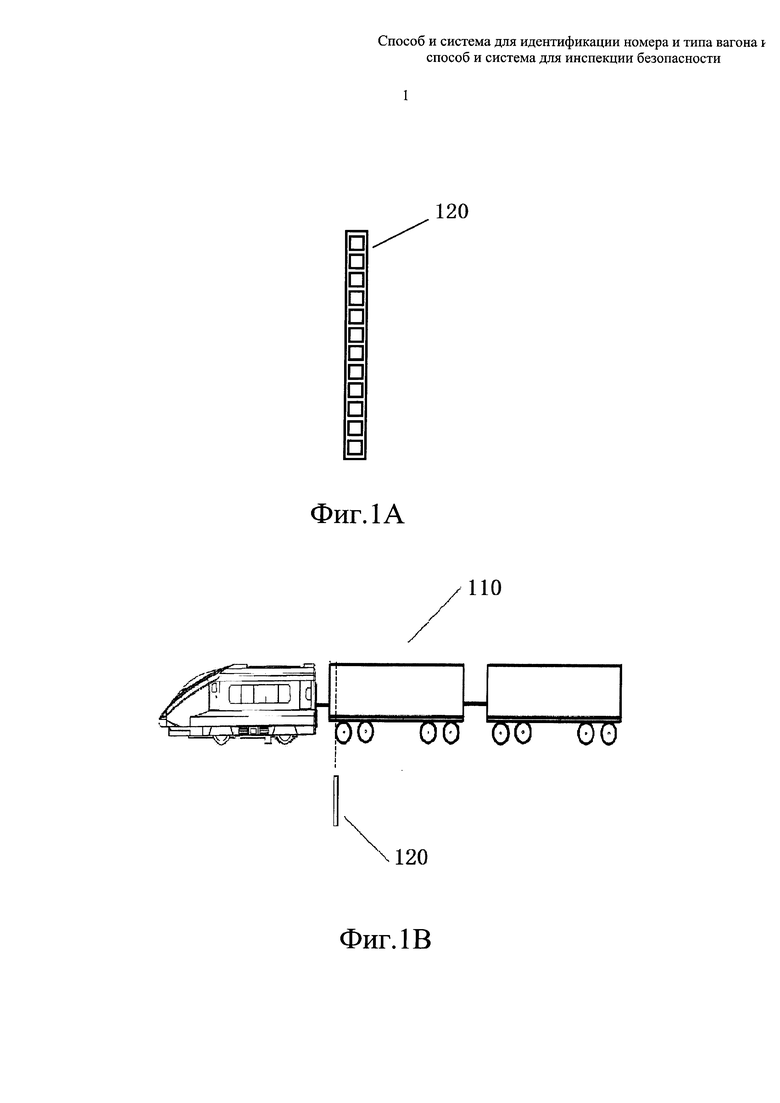
[0028] На фиг. 1А схематично показан линейный массив фотокамер для использования в устройстве для идентификации номера и типа вагона согласно некоторым данным в качестве примера вариантам выполнения настоящего изобретения;
[0029] на фиг. 1В схематично показана идентификация номера и типа вагона согласно некоторым данным в качестве примера вариантам выполнения настоящего изобретения;
[0030] на фиг. 2 иллюстрируется способ идентификации номера вагона согласно некоторым вариантам выполнения настоящего изобретения;
[0031] на фиг. 3 схематично показана система идентификации номера вагона согласно некоторым вариантам выполнения настоящего изобретения;
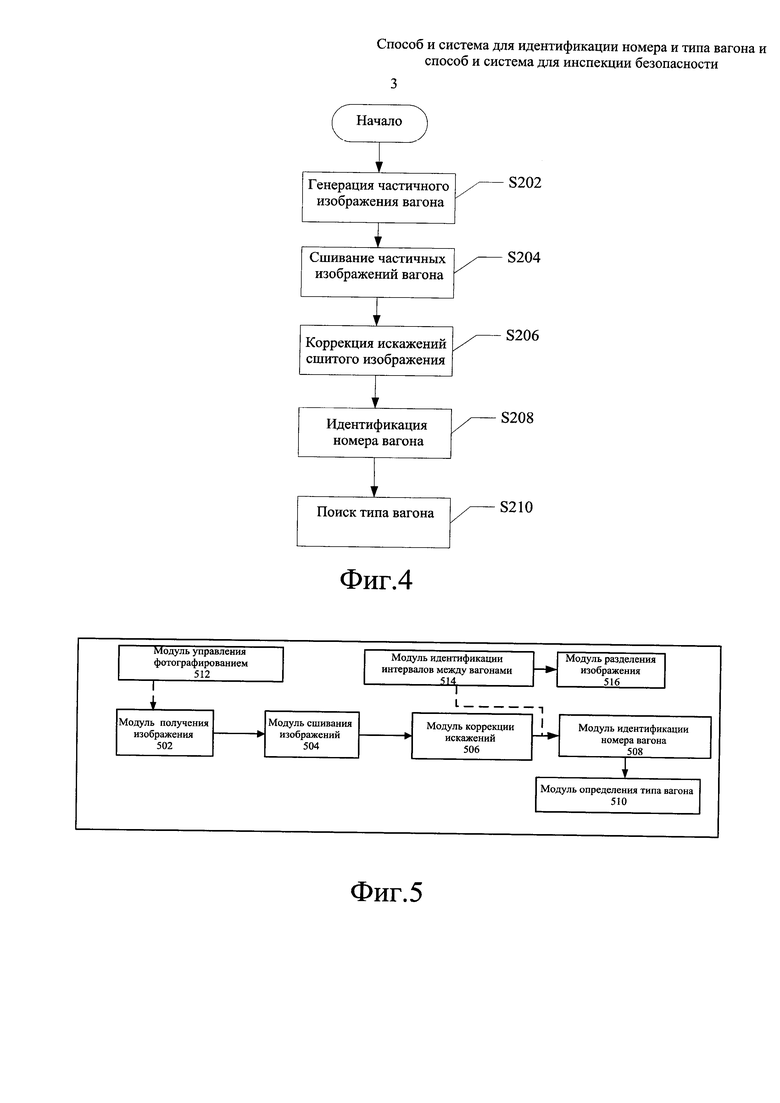
[0032] на фиг. 4 иллюстрируется способ идентификации типа вагона согласно некоторым вариантам выполнения настоящего изобретения;
[0033] на фиг. 5 схематично показана система идентификации типа вагона согласно некоторым вариантам выполнения настоящего изобретения;
[0034] на фиг. 6 иллюстрируется способ проведения инспекции безопасности вагонов согласно некоторым вариантам выполнения настоящего изобретения; и
[0035] на фиг. 7 схематично показана система для проведения инспекции безопасности вагонов согласно некоторым вариантам выполнения настоящего изобретения.
Подробное описание
[0036] Ниже данные в качестве примера варианты выполнения настоящего изобретения описаны более подробно со ссылками на сопровождающие чертежи. Однако данные в качестве примера варианты выполнения настоящего изобретения могут быть осуществлены множеством способов и не должны рассматриваться как ограниченные вариантами, описанным ниже. Напротив, такие данные в качестве примера варианты выполнения настоящего изобретения более полно иллюстрируют настоящее изобретение и передают специалистам в данной области техники концепции вариантов выполнения настоящего изобретения. На чертежах одинаковыми позициями обозначены одинаковые или подобные конструкции или элементы. Поэтому подробное описание этих конструкций или элементов далее опущено.
[0037] Кроме того, описанные характеристики, конструкции или признаки могут входить в один или большее количество вариантов выполнения настоящего изобретения любым подходящим способом. В дальнейшем описании раскрыто больше деталей, обеспечивающих достаточное понимание вариантов выполнения настоящего изобретения. Однако специалистам в данной области техники очевидно, что технические решения в рамках настоящего изобретения могут быть осуществлены без одного или большего количества конкретных деталей или могут быть осуществлены с использованием других способов, компонентов, материалов, устройств, шагов и т.п. В других случаях общеизвестные конструкции, способы, устройства, практическая реализация, материалы и операции не поясняются и не описаны подробно, чтобы избежать загромождения аспектов настоящего раскрытия ненужными подробностями.
[0038] Блок-схемы, показанные на чертежах, являются просто функциональными объектами, но не обязательно физически независимыми объектами. Таким образом, эти функциональные объекты могут быть реализованы посредством программного обеспечения, или же эти функциональные объекты или их часть могут быть осуществлены в одном, или множестве аппаратных элементов, усиленных программным обеспечением, или эти функциональные объекты могут быть осуществлены в различных сетях, и/или процессорах, и/или микроконтроллерах.
[0039] Настоящее изобретение относится к системе регистрации в реальном времени, к системе и способу проведения инспекции безопасности для использования с крупномасштабными целевыми объектами, так, чтобы человек, отвечающий за проверку безопасности, мог следить за процессом сканирования посредством изображений в реальном времени и принимать предварительное решение относительно инспектируемого объекта согласно этим изображениям в реальном времени.
[0040] На фиг. 1А схематично показан линейный массив 120 фотокамер для использования в устройстве для идентификации номера и типа вагона согласно некоторым вариантам выполнения настоящего изобретения. На фиг. 1В схематично иллюстрируется идентификация номера и типа вагона согласно некоторым вариантам выполнения настоящего изобретения.
[0041] Как показано на фиг. 1А и 1В, линейный массив 120 фотокамер может использоваться для фотографирования вагона 110 с целью идентификации номера и типа вагона.
[0042] В способе идентификации номера и типа вагона согласно настоящему изобретению, изображения вагонов, полученных линейным массивом 120 фотокамер, могут использоваться для идентификации типа вагона.
[0043] На фиг. 2 иллюстрируется способ идентификации номера вагона согласно некоторым вариантам выполнения настоящего изобретения.
[0044] На фиг. 2 на шаге S202 способа идентификации номера вагона согласно настоящему раскрытию линейный массив фотокамер, движущийся относительно инспектируемого вагона непрерывно фотографирует этот инспектируемый вагон с формированием множества частичных изображений вагона. Правила и использование линейного массива фотокамер известны и здесь не описаны. Во время фотографирования инспектируемого вагона с использованием линейного массива фотокамер этот линейный массив фотокамер может быть установлен сбоку от вагона для получения изображения боковой стороны вагона. Однако настоящее изобретение этим не ограничено. Например, согласно фактическим потребностям, линейный массив фотокамер может также быть установлен над вагоном для получения изображения вагона сверку. Альтернативно, линейный массив фотокамер может быть установлен во множестве мест для получения изображения вагона с большего количества направлений. Кроме того, номер вагона, упомянутый в настоящем изобретении, следует понимать широко, не ограничиваясь официальным номером вагона. Например, в контексте настоящего изобретения номер вагона может также относиться к знаку, размещенному в любом месте корпуса вагона и предназначенному для идентификации вагона.
[0045] На шаге S204 сшивают множество частичных изображений вагона с формированием сшитого изображения. Например, множество частичных изображений вагона можно сшивать с использованием компьютерной системы обработки изображений с формированием изображения вагона. Как описано ниже, в процессе сшивания изображений изображение можно обрабатывать. Альтернативно, изображение можно обработать согласно фактическим условиям после завершения сшивания.
[0046] На шаге S206 корректируют искажение сшитого изображения с формированием скорректированного изображения.
[0047] Искажение изображения вагона может влиять на идентификацию номера вагона. Искажение изображения вагона связано со скоростью вагона и частотой фотографирования камеры. Согласно некоторым вариантам выполнения настоящего изобретения, линейным массивом фотокамер можно управлять для непрерывного фотографирования инспектируемого вагона с частотой фотографирования, вычисленной согласно относительной скорости инспектируемого вагона.
[0048] Очевидно, что отношение между относительной скоростью инспектируемого вагона в пределах каждого временного периода и количеством частичных изображений вагона в пределах этого временного периода определяется шириной объекта, идентифицируемого каждым блоком отображения в линейном массиве фотокамер в каждую секунду.
[0049] Например, если предположить, что фокусное расстояние f линейного массива фотокамер составляет 35 мм, ширина d (которая в общем случае представляет собой ширину точки пикселя в линейном массиве фотокамер; если в линейном массиве фотокамер используется n пикселей, ширина блока отображения равна n, умноженной на ширину одного пикселя соответственно) элемента отображения равна 14 мкм, расстояние h до объекта равно 2,5 м, ширина объекта (ширина объекта определяется каждым элементом отображения) равна W=d×h/f=1 мм, тогда увеличение, даваемое линейным массивом фотокамер, равно в этом случае h/f=7143. Если предполагается, что частота фотографирования линейным массивом фотокамер составляет 10 кГц, тогда как ширина объекта, определяемая каждым элементом отображения в секунду, составляет D=10000 частичных изображений × 1 мм = 10 м., то есть, у каждого элемента отображения имеется скорость идентификации 10 м/с=36 км/час. В этом случае отношение между относительной скоростью вагона в пределах каждого временного периода и количеством частичных изображений вагона в пределах временного периода составляет 36 км/час÷10000 частичных изображений/с = 1 мм/частичное изображение (здесь временной период установлен равным 1 с), и это отношение представляет собой ширину w объекта идентифицированного каждым элементом изображения. Если вагон проезжает область фотографирования со скоростью 36 км/час, линейный массив фотокамер способен получать изображения с той же пропорцией физического объекта (то есть, не сжатого и не растянутого) с частотой фотографирования. Если вагон проходит область фотографирования со скоростью 18 км/час, исходные 10000 частичных изображений/с комбинируют с 5000 частичными изображениями/с с использованием некоторого алгоритма, и отношение между относительной скоростью вагона в пределах каждого временного периода и количеством частичных изображений вагона в пределах временного периода составляет 18 км/час÷5000 частичных изображений/час = 1 мм/частичное изображение (здесь временной период также установлен равным 1 с), и это отношение также представляет собой ширину w объекта, идентифицированного каждым элементом отображения. Как следует из вышеизложенной теории, количество используемых частичных изображений вагона может быть определено согласно фактически измеренной скорости вагона и вышеуказанного отношения. Таким образом, сшитое изображение вагона может быть изображением вагона, свободным от искажений.
[0050] Есть множество подходов для измерения скорости вагона. Скорость вагона можно измерить непосредственно датчиком скорости, таким как радар для измерения скорости, установленный около линейного массива фотокамер. Альтернативно, скорость вагона можно также измерить на основе моментов времени, когда вагон проезжает мимо двух датчиков положения, и расстояния между этими двумя датчиками положения, в качестве которых можно использовать индукционные катушки, и/или фотоэлектрические выключатели, и/или электронные экраны. Согласно некоторым вариантам выполнения настоящего изобретения, в качестве опции, после того, как инспектируемый вагон обнаружен с использованием радара или датчика, линейным массивом фотокамер управляют так, чтобы они немедленно произвели фотографирование, или запускают фотографирование с задержкой. Например, при использовании датчиков положения, таких как фотоэлектрические выключатели или электронные экраны, когда вагон подходит, датчик блокируется, то есть датчик фиксирует прибытие вагона. Альтернативно, прибытие вагона может быть известно при использовании датчиков скорости, таких как радар измерения скорости. В качестве опции, скорость вагона может возвращаться в режиме реального времени в качестве параметра обратной связи, и частоту фотографирования вагона линейным массивом фотокамер для генерации частичных изображений вагона можно регулировать согласно этой скорости обратной связи так, чтобы частота генерирования частичных изображений линейным массивом фотокамер в пределах каждого временного периода была пропорциональна средней скорости вагона в пределах этого временного периода, что предотвращает искажение изображения. Датчик (датчики) может быть установлен рядом с линейным массивом фотокамер, и, когда вагон попадает в зону действия датчика, этот датчик выдает в режиме реального времени команду, предписывающую линейному массиву фотокамер немедленно сфотографировать вагон. Альтернативно, датчик может быть также установлен перед линейным массивом фотокамер на заранее заданном расстоянии. Когда датчик обнаруживает, что прибывает вагон, этот датчик выдает команду линейному массиву фотокамер немедленно сфотографировать вагон, или выдает команду линейному массиву фотокамер начать фотографирование вагона с некоторой задержкой.
[0051] Очевидно, что линейным массивом фотокамер можно управлять для непрерывного фотографирования инспектируемого вагона согласно заранее заданной частоте фотографирования (например, если частота фотографирования линейным массивом фотокамер составляет 10 кГц, то есть, 10000 частичных изображений/с, одно частичное изображение вагона генерируется за 1/10000 секунды), и количество частичных изображений можно отрегулировать. Например, можно определить соседние временные периоды, и количество частичных изображений в пределах каждого временного периода может быть отрегулировано согласно относительной скорости инспектируемого вагона в каждом временном периоде на основе вышеуказанных правил так, чтобы отношение между относительной скоростью инспектируемого вагона в пределах каждого временного периода и количеством частичных изображений в пределах временного периода оставалось согласованным.
[0052] Если относительная скорость инспектируемого вагона ниже относительной скорости, соответствующей заранее заданной частоте фотографирования, по меньшей мере одно частичное изображение можно вычесть согласно заранее заданному правилу из частичных изображений, полученных в пределах временного периода. Если относительная скорость инспектируемого вагона выше относительной скорости, соответствующей заранее заданной частоте фотографирования, по меньшей мере одно частичное изображение можно добавить к частичным изображениям, полученных в пределах временного периода, посредством интерполяции.
[0053] Например, временной период можно определить путем вычисления согласно количеству частичных изображений и/или скорости вагона, или его можно установить вручную, например, временной период может быть установлен равным 1 с или 10 с. В общем случае при высокой скорости вагона требуется высокая частота фотографирования линейным массивом фотокамер, и временной период может быть установлен относительно малым. Однако в общем случае в пределах временного периода генерируется более одного частичного изображения. Скорость вагона в пределах каждого временного периода может быть средней скоростью вагона в пределах временного периода или скоростью вагона в начале или в конце этого временного периода.
[0054] Согласно некоторым вариантам выполнения настоящего изобретения, линейный массив фотокамер на максимальной частоте фотографирования захватывает максимальное число частичных изображений в пределах временного периода инспектирования вагона (то есть, продолжительности времени, необходимого для прохождения всего вагона). Если скорость инспектируемого вагона в пределах этого временного периода ниже, чем предельная скорость, количество частичных изображений в пределах этого временного периода уменьшают посредством вычитания согласно разности между действительной скоростью и предельной скоростью так, чтобы скорость вагона в пределах каждого временного периода была приблизительно пропорциональна количеству генерируемых частичных изображений. Это может предотвратить искажение изображения, обусловленное скоростью вагона. Например, если предельная скорость вагона в пределах времени инспектирования составляет 30 км/час, соответствующая частота фотографирования равна 50 частичных изображений/с (то есть, частоте генерирования частичных изображений вагона), а если измеренная скорость вагона в пределах временного периода равна 24 км/час, количество частичных изображений в пределах этого временного периода изменяется на 40 частичных изображений/с соответственно, то есть, вычитают одно частичное изображение из каждых пяти частичных изображений. Частичные изображения могут быть вычтены согласно заранее заданному правилу, например, вычитают три частичных изображения из каждых пяти частичных изображений. Кроме того, обеспечивают, чтобы скорость вагона была пропорциональна количеству частичных изображений вагона так, чтобы изображение вагона, полученного посредством сшивания частичных изображений вагона, захваченных линейным массивом фотокамер в пределах каждого временного периода, было свободно от искажений.
[0055] Например, линейный массив фотокамер может сфотографировать вагон на средней частоте фотографирования, которая соответствует наиболее частой скорости вагона или средней скорости вагона в пределах инспекционного временного периода. Если скорость вагона в пределах временного периода больше, чем самая частая скорость вагона или средняя скорость вагона, можно использовать интерполяцию, чтобы избежать искажений. Например, два изображения, сфотографированные подряд в соответствующем месте в пределах временного периода, подвергают подгонке и сглаживанию для обеспечения интерполяции между этими двумя частичными изображениями и формирования новых частичных изображений вагона. Таким образом, хотя полученное изображение имеет более низкое разрешение, чем разрешение частичных изображений, полученных посредством фотографирования, оно характеризуется такими же пропорциями расстояний в изображении в профиле вагона и в фактическом вагоне. Если скорость вагона в пределах временного периода ниже самой частой скорости вагона, количество частичных изображений уменьшают посредством вышеуказанного способа вычитания. Например, если средняя скорость вагона составляет 30 км/час, соответствующая частота фотографирования равна 50 частичных изображений/с (то есть, частоте генерирования частичных изображений вагона), а если измеренная скорость вагона в пределах временного периода равна 36 км/час, количество частичных изображений в пределах этого временного периода изменяется на 60 частичных изображений/с соответственно, то есть, к каждым пяти частичным изображениям прибавляют одно частичное изображение. Например, новое частичное изображение вагона, полученное путем подгонки или усреднения, можно добавить между вторым частичным изображением и третьим частичным изображением вагона. Это обеспечивает ситуацию, при которой скорость вагона пропорциональна количеству частичных изображений вагона.
[0056] Для коррекции сшитого изображения можно использовать различные способы.
[0057] Согласно данному в качестве примера варианту выполнения настоящего изобретения изображение корректируют с использованием колеса в качестве эталона профиля. Такой способ коррекции прост и эффективен и может повысить эффективность обработки и снизить ее стоимость.
[0058] Например, после того, как сшитое изображение получено, можно извлечь из сшитого изображения профиль колеса. Затем из профиля колеса получают отношение между горизонтальным диаметром и вертикальным диаметром колеса. Если это отношение больше первого заранее заданного порога, сшитое изображение является сжатым в горизонтальном направлении; а если отношение меньше второго заранее заданного порога, сшитое изображение является растянутым в горизонтальном направлении. В результате для последующих операций получают изображение вагона с малыми искажениями.
[0059] На шаге 208 идентифицируют номер вагона. Номер вагона может быть идентифицирован на основе полученного изображения вагона с использованием известных способов идентификации номера вагона. Например, область номера вагона можно вырезать из скорректированного изображения, можно применить сглаживание (сглаживание может убрать шумы) и цифровую обработку изображения области номера вагона, а затем изображение области номера вагона посылают в средство для распознавания символов для идентификации номера вагона. Наконец, номер вагона, идентифицированный средством для распознавания символов, может быть автоматически скорректирован согласно некоторому правилу назначения номеров вагонов. Поскольку способы идентификации номера вагона известны специалистам, подробности здесь не обсуждаются.
[0060] Для удобства просмотра изображения оператором, согласно некоторым вариантам выполнения настоящего изобретения, по полученному изображению вагона можно определить места сцепки вагонов, а затем изображение вагона может быть разделено на множество субизображений согласно местоположениям сцепок.
[0061] Выше описан способ идентификации номера вагона согласно настоящему изобретению. Ниже описана система идентификации номера вагона, которая может осуществить вышеуказанный способ.
[0062] Как показано на фиг. 3, система идентификации номера вагона согласно некоторым вариантам выполнения настоящего изобретения может содержать модуль 502 получения изображения, модуль 504 сшивания изображений, модуль 506 коррекции искажений и модуль 508 идентификации номера вагона.
[0063] Модуль 502 получения изображения предназначен для получения множества частичных изображений инспектируемого вагона, которые генерируются при непрерывном фотографировании инспектируемого вагона с использованием линейного массива фотокамер, движущихся относительно инспектируемого вагона.
[0064] В модифицированном варианте выполнения настоящего изобретения система может дополнительно содержать модуль 512 управления фотографированием, предназначенный для непрерывного фотографирования инспектируемого вагона согласно частоте фотографирования, вычисленной согласно относительной скорости инспектируемого вагона. Альтернативно, модуль 502 получения изображения получает множество частичных изображений, сфотографированных линейным массивом фотокамер согласно заранее заданной частоте фотографирования.
[0065] Модуль 504 сшивания изображений предназначен для сшивания множества частичных изображений вагона с формированием сшитого изображения.
[0066] В модифицированном варианте выполнения настоящего изобретения модуль 504 сшивания изображений дополнительно определяет соседние временные периоды и подгоняет количество частичных изображений вагона в пределах каждого временного периода согласно относительной скорости инспектируемого вагона в каждом временном периоде так, что отношение относительной скорости инспектируемого вагона в пределах каждого временного периода и количества частичных изображений вагона в пределах временного периода остается согласованным. Если относительная скорость инспектируемого вагона ниже относительной скорости, соответствующей заранее заданной частоте фотографирования, по меньшей мере одно частичное изображение вычитается согласно заранее заданному правилу из частичных изображений, полученных в пределах временного периода; а если относительная скорость инспектируемого вагона выше относительной скорости, соответствующей заранее заданной частоте фотографирования, по меньшей мере одно частичное изображение прибавляется к частичным изображениям вагона, полученным в пределах временного периода, посредством интерполяции.
[0067] Модуль 506 коррекции искажений предназначен для коррекции искажений в сшитом изображении.
[0068] Например, модуль 506 коррекции искажений может: извлекать контур колеса из сшитого изображения; получать отношение между горизонтальным диаметром и вертикальным диаметром колеса по этому контуру; если указанное отношение превышает первый заданный порог, сжимать сшитое изображение в горизонтальном направлении согласно этому отношению; а если указанное отношение меньше второго заданного порога, растягивать сшитое изображение в горизонтальном направлении.
[0069] Модуль 508 идентификации номера вагона предназначен для идентификации номера вагона по скорректированному изображению, и подробное его описание здесь опущено.
[0070] Кроме того, согласно номеру вагона можно идентифицировать тип вагона.
[0071] Идентификацию типа вагона широко применяют на практике, например при инспекции безопасности вагона или при определении места для ремонта вагона. В области проведения инспекции безопасности вагона различают различные типы вагонов с целью определить, переводит ли инспектируемый вагон пассажиров, чтобы можно было задать различные дозы рентгеновского облучения, или же вагон не перевозит пассажиров: при этом вагон с пассажирами при инспекции не облучают рентгеновскими лучами. Для этого требуется, чтобы идентификация типа вагона сначала включала определение, является ли вагон, входящий в инспекционную область, локомотивом или пассажирским вагоном, перевозящим пассажиров.
[0072] Типы вагонов разбиты на следующие категории: локомотив, пассажирский вагон, грузовой вагон и т.п. Грузовые вагоны при более точной категоризации подразделяются на крытые вагоны, платформы, нефтяные цистерны, вагоны-автомобилевозы и т.п. Вагоны различных типов имеют различные колесные базы, высоту, тип перевозимых объектов (например, перевозимыми объектами на вагонах различных типов могут быть пассажиры, твердотельные грузы, жидкие грузы и т.п.). В одном из способов идентификации типа вагона вдоль железной дороги устанавливают множество точек осмотра, и в каждой инспекционной точке устанавливают магнитную сталь. Обнаруживают относительную скорость и положение оси вагона для определения колесной базы. Пассажирские вагоны можно отличить от грузовых вагонов на основе различия в колесных базах. Однако в разных странах имеются различные заданные стандарты для вагонов, так что у вагонов одного типа может и не быть той же самой колесной базы. Поэтому вагоны одного и того же типа в разных странах нельзя идентифицировать при использовании способа с измерением колесной базы. Кроме того, иногда вагоны переоборудуют (например, пассажирские вагоны могут быть переоборудованы в вагоны-рефрижераторы, которые перевозят груз вместо пассажиров), в результате объекты перевозки меняются, но колесная база в общем случае остается той же самой. Кроме того, объекты перевозки вагонами невозможно идентифицировать посредством измерения колесной базы.
[0073] На фиг. 4 иллюстрируется способ идентификации типа вагона согласно варианту выполнения настоящего изобретения. В варианте выполнения настоящего изобретения на фиг. 4 используется способ, раскрытый при описании фиг. 2. Более конкретно, добавлен шаг S210 определения типа вагона. Детали шага S210 описаны ниже.
[0074] На шаге S210 тип ищут в базе данных или списке данных с использованием идентифицированного номера вагона. Например, база данных или список данных могут содержать запись соответствующей связи между номерами вагонов и типами вагонов, и при использовании идентифицированного номера вагона можно найти тип вагона. В модифицированном варианте выполнения настоящего изобретения поиск невозможен, вместо этого тип вагона можно определить непосредственно по номеру вагона согласно правилу, определяющему номера вагонов. Например, согласно правилу определения номера вагона, первые два символа могут представлять тип вагона.
[0075] Очевидно, что способ идентификации типа вагона согласно настоящему изобретению не ограничен использованием номера вагона, идентифицированного согласно способу, предложенному в настоящем описании.
[0076] На фиг. 5 показана система идентификации типа вагона согласно еще одному варианту выполнения настоящего изобретения. В варианте выполнения настоящего изобретения, показанном на фиг. 5, используется система, показанная на фиг. 3. Более конкретно, добавлен модуль 510 определения типа вагона.
[0077] Модуль 510 определения типа вагона может производить поиск указанного типа в базе данных или в списке данных с использованием идентифицированного номера вагона. Например, база данных или список данных могут содержать запись соответствующей связи между номерами вагона и типами вагонов, и при использовании идентифицированного номера вагона можно найти тип вагона. В модифицированном варианте выполнения настоящего изобретения модуль 510 определения типа вагона не обязан выполнять поиск; вместо этого модуль 510 идентификации типа вагона может определять тип вагона непосредственно по номеру вагона согласно правилу, определяющему номера вагонов.
[0078] В еще одном модифицированном варианте выполнения настоящего изобретения система может дополнительно содержать модуль 514 идентификации сцепки и модуль 516 разделения изображения. Модуль 514 идентификации сцепки предназначен для определения местоположения сцепки (то есть, элементов сцепки между вагонами поезда, используемыми для сцепления вагонов) вагонов. Модуль 516 разделения изображения предназначен для разбиения изображения вагона на множество субизображений вагона согласно местоположениям сцепок.
[0079] Очевидно, что система идентификации типа вагона согласно настоящему изобретению не ограничена использованием системы идентификации номера вагона согласно настоящему изобретению.
[0080] При использовании способа идентификации типа вагона согласно настоящему изобретению можно понять процесс проведения инспекции безопасности вагонов, как показано на фиг. 6.
[0081] На фиг. 6 на шаге 602 идентифицируют тип инспектируемого вагона, который входит в инспекционную область, с использованием способа идентификации типа вагона, описанного выше.
[0082] На шаге 604 производят соответствующую инспекцию с использованием облучения согласно типу вагона. Если инспектируемый вагон - локомотив или пассажирский вагон, этот инспектируемый вагон облучают малой дозой или вообще не облучают, а и если инспектируемый вагон - грузовой вагон, то этот вагон облучают большой дозой.
[0083] На фиг. 7 показана система для проведения инспекции безопасности вагонов согласно некоторым вариантам выполнения настоящего изобретения, способная осуществить вышеуказанный способ проведения инспекции безопасности вагонов.
[0084] Как показано на фиг. 7, система для проведения инспекции безопасности вагонов может содержать систему 702 идентификации типа вагона и модуль 704 управления облучением. Модуль 704 управления облучением предназначен для того, чтобы, согласно типу инспектируемого вагона, как определено системой идентификации типа вагона, управлять источником облучения для облучения инспектируемого вагона первой дозой или необлучения его вообще, когда инспектируемый вагон - локомотив или пассажирский вагон, и управлять источником облучения для облучения инспектируемого вагона второй дозой, когда инспектируемый вагон - грузовой вагон, при этом первая доза меньше, чем вторая доза. Система 702 идентификации типа вагона была описана выше, и повторное ее описание опущено.
[0085] Из приведенного выше подробного описания специалисту очевидно, что система и способ согласно вариантам выполнения настоящего изобретения имеют один или большее количество следующих преимуществ.
[0086] Корректировка искажений производится с использованием профиля колеса и, таким образом, обеспечивается простая и удобная идентификация номера вагона.
[0087] Определение типа вагона согласно номеру вагона просто и понятно и обеспечивает высокую точность идентификации.
[0088] Их приведенного выше подробного описания специалисту очевидно, что способ и соответствующие модули согласно вариантам выполнения настоящего изобретения могут быть осуществлены посредством программного обеспечения или программного обеспечения с частичным использованием аппаратных средств. При понимании вышеуказанного технические решения согласно вариантам выполнения настоящего изобретения могут быть по существу реализованы в виде программного продукта. Программный продукт может храниться на долговременном носителе данных, таком как постоянное запоминающее устройство (ROM), U-диск, мобильный жесткий диск и т.п. Программный продукт содержит множество инструкций, которые позволяют компьютерному устройству (персональному компьютеру, серверу, мобильному терминалу или сетевому устройству) реализовать способ, предложенный в вариантах выполнения настоящего изобретения.
[0089] Специалисту очевидно, что сопровождающие чертежи предназначены только для иллюстрации данных в качестве примера вариантов выполнения настоящего изобретения, и модули или последовательности операций на чертежах не являются необходимыми для этих вариантов выполнения настоящего изобретения и, таким образом, не ограничивают патентуемый объем настоящего изобретения.
[0090] Специалисту очевидно, что вышеуказанные модули могут быть установлены в устройстве согласно описанию, данному в вариантах выполнения настоящего изобретения, или могут быть подходящим образом модифицированы и установлены в одном или большем количестве устройств, отличающихся от показанных в этом варианте выполнения настоящего изобретения. Модули согласно вышеуказанным вариантам выполнения настоящего изобретения могут быть скомбинированы в одном модуле, или распределены по множеству субмодулей.
[0091] Выше подробно рассмотрены примеры вариантов выполнения настоящего изобретения. Подразумевается, что настоящее изобретение не ограничено вышеуказанными примерами вариантов его выполнения. Напротив, предполагается, что настоящее изобретение охватывает различные модификации и эквиваленты в пределах объема пунктов формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ИНСПЕКЦИИ ОБЪЕКТОВ | 2006 |
|
RU2390762C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ МАТЕРИАЛОВ С ПОМОЩЬЮ БЫСТРЫХ НЕЙТРОНОВ И НЕПРЕРЫВНОГО СПЕКТРАЛЬНОГО РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ | 2006 |
|
RU2305829C1 |
| СИСТЕМА И СПОСОБ СКАНИРОВАНИЯ | 2004 |
|
RU2298292C2 |
| СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ИЗЛУЧЕНИЯ | 2008 |
|
RU2399172C2 |
| МОНИТОРИНГ ТОЛЩИНЫ СТЕНКИ | 2003 |
|
RU2323410C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ГЛАЗ ЛЮДЕЙ И ЖИВОТНЫХ | 2002 |
|
RU2223516C1 |
| СИСТЕМА И СПОСОБ СКАНИРОВАНИЯ И КОПИРОВАНИЯ | 2004 |
|
RU2368091C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ БАНКОМАТАМИ | 2016 |
|
RU2708422C1 |
| СИСТЕМА И СПОСОБ ИДЕНТИФИКАЦИИ ЖЕЛЕЗНОДОРОЖНЫХ НОМЕРНЫХ ДЕТАЛЕЙ ПО ИЗОБРАЖЕНИЮ ИХ ПОВЕРХНОСТЕЙ С КЛЕЙМАМИ И ЗНАКАМИ МАРКИРОВКИ | 2019 |
|
RU2702965C1 |
| СПОСОБ, СИСТЕМА, ЦИФРОВАЯ ФОТОКАМЕРА И СИС, ОБЕСПЕЧИВАЮЩИЕ ГЕОМЕТРИЧЕСКОЕ ПРЕОБРАЗОВАНИЕ ИЗОБРАЖЕНИЯ НА ОСНОВАНИИ ПОИСКА ТЕКСТОВЫХ СТРОК | 2006 |
|
RU2412482C2 |


Изобретение относится к средствам идентификации и инспекции вагонов. Технический результат заключается в расширении арсенала средств для идентификации вагонов. В способе осуществляют непрерывное фотографирование инспектируемого вагона с использованием линейного массива фотокамер, движущегося относительно вагона, и генерацию множества частичных изображений вагона и их сшивание с получением сшитого изображения, коррекцию искажений в сшитом изображении с получением скорректированного изображения, идентификацию номера вагона по скорректированному изображению, при этом указанная коррекция включает извлечение контура колеса из сшитого изображения, получение из указанного контура отношения между горизонтальным диаметром и вертикальным диаметром колеса, если это отношение больше первого заданного порога, сжатие сшитого изображения в горизонтальном направлении согласно этому отношению, если это отношение меньше второго заданного порога, растягивание сшитого изображения в горизонтальном направлении. 10 н. и 20 з.п. ф-лы, 8 ил.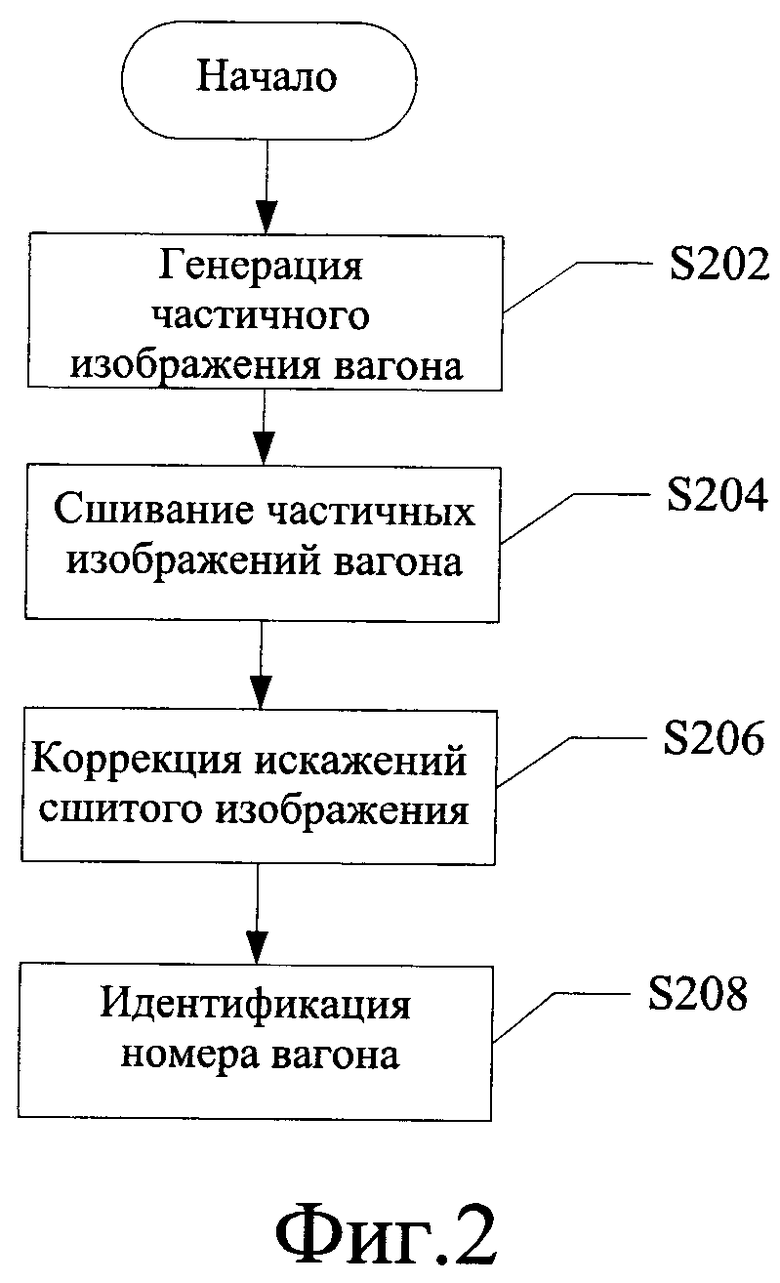
1. Способ идентификации номера вагона, включающий:
непрерывное фотографирование инспектируемого вагона с использованием линейного массива фотокамер, движущегося относительно инспектируемого вагона, и генерацию множества частичных изображений вагона;
сшивание множества частичных изображений вагона с получением сшитого изображения;
коррекцию искажений в сшитом изображении с получением скорректированного изображения;
идентификацию номера вагона по скорректированному изображению;
при этом коррекция искажений сшитого изображения включает:
извлечение контура колеса из сшитого изображения;
получение из указанного контура отношения между горизонтальным диаметром и вертикальным диаметром колеса;
если это отношение больше первого заданного порога, сжатие сшитого изображения в горизонтальном направлении согласно этому отношению; а если это отношение меньше второго заданного порога, растягивание сшитого изображения в горизонтальном направлении.
2. Способ по п. 1, в котором множество частичных изображений, сфотографированных линейным массивом фотокамер с заданной частотой фотографирования, получают с помощью модуля получения изображения.
3. Способ по п. 1, в котором идентификация номера вагона по скорректированному изображению включает:
вырезание области номера вагона в скорректированном изображении с получением изображения области номера вагона;
сглаживание и цифровую обработку изображения области номера вагона;
идентификацию номера вагона с использованием средства для распознавания символов; и
автоматическую коррекцию идентифицированного номера вагона согласно правилу назначения номеров вагонов.
4. Система идентификации номера вагона, содержащая:
модуль получения изображения, предназначенный для получения множества частичных изображений инспектируемого вагона, которые генерируются путем непрерывного фотографирования инспектируемого вагона с использованием линейного массива фотокамер, движущегося относительно инспектируемого вагона;
модуль сшивания изображений, предназначенный для сшивания множества частичных изображений вагона с формированием сшитого изображения;
модуль коррекции изображения, предназначенный для коррекции искажений сшитого изображения с получением скорректированного изображения;
модуль идентификации номера вагона, предназначенный для идентификации номера вагона по скорректированному изображению;
при этом модуль коррекции изображения выполнен с возможностью:
извлечения контура колеса из сшитого изображения;
получения отношения между горизонтальным диаметром и вертикальным диаметром колеса из указанного контура;
если это отношение больше первого заданного порога, сжатия сшитого изображения в горизонтальном направлении согласно этому отношению; а если это отношение меньше второго заданного порога, растягивания сшитого изображения в горизонтальном направлении.
5. Система по п. 4, в которой модуль получения изображения предназначен для получения множества частичных изображений, сфотографированных линейным массивом фотокамер с заданной частотой фотографирования.
6. Система по п. 4, в которой модуль идентификации номера вагона выполняет следующее:
вырезание области номера вагона в скорректированном изображении с получением изображения области номера вагона;
сглаживание и цифровую обработку изображения области номера вагона;
идентификацию номера вагона с использованием средства для распознавания символов; и
автоматическую коррекцию идентифицированного номера вагона согласно правилу назначения номеров вагонов.
7. Способ идентификации типа вагона, включающий:
идентификацию номера вагона согласно способу по любому из пп. 1-3; и
определение типа вагона согласно номеру вагона.
8. Способ по п. 7, в котором определение типа вагона согласно номеру вагона включает:
поиск указанного типа в базе данных или списке данных с использованием номера вагона.
9. Способ по п. 7, в котором определение типа вагона согласно номеру вагона включает:
прямое определение типа вагона по номеру вагона согласно правилу назначения номеров вагонов.
10. Система идентификации типа вагона, содержащая:
модуль идентификации номера вагона, предназначенный для идентификации номера вагона, по любому из пп. 4-6; и
модуль определения типа вагона, предназначенный для определения типа вагона согласно номеру вагона.
11. Система по п. 10, в которой модуль определения типа вагона предназначен для поиска указанного типа в базе данных или в списке данных с использованием номера вагона.
12. Система по п. 10, в которой модуль определения типа вагона предназначен для прямого определения типа вагона по номеру вагона согласно правилу назначения номеров вагонов.
13. Система по п. 10, в которой тип вагона представляет собой любое из следующего: локомотив, грузовой вагон и пассажирский вагон.
14. Система по п. 10, дополнительно содержащая:
модуль идентификации сцепки, предназначенный для определения мест сцепок вагонов; и
модуль разделения изображения, предназначенный для разбиения изображения поезда на множество субизображений вагонов согласно положениям сцепок.
15. Система для инспекции безопасности вагонов, содержащая:
систему идентификации типа вагона по любому из пп. 10-14; и
модуль управления облучением, предназначенный для того, чтобы, согласно типу инспектируемого вагона, определенному системой идентификации типа вагона, управлять источником облучения для облучения инспектируемого вагона первой дозой или необлучения инспектируемого вагона, если инспектируемый вагон - это локомотив или пассажирский вагон, и управлять источником облучения для облучения инспектируемого вагона второй дозой, если инспектируемый вагон - грузовой вагон, при этом первая доза меньше, чем вторая доза.
16. Способ идентификации номера вагона, включающий:
непрерывное фотографирование инспектируемого вагона с использованием линейного массива фотокамер, движущегося относительно инспектируемого вагона, и генерацию множества частичных изображений вагона;
сшивание множества частичных изображений вагона с получением сшитого изображения;
коррекцию искажений в сшитом изображении с получением скорректированного изображения;
идентификацию номера вагона по скорректированному изображению;
при этом коррекция искажений сшитого изображения включает:
получение отношения между горизонтальным расстоянием и вертикальным расстоянием изображения колеса, извлеченного из сшитого изображения, где горизонтальное расстояние - это расстояние между самой левой и самой правой точками колеса, а вертикальное расстояние - это расстояние между самой верхней и самой нижней точками колеса;
если это отношение больше первого заданного порога, сжатие сшитого изображения в горизонтальном направлении согласно этому отношению; а если это отношение меньше второго заданного порога, растягивание сшитого изображения в горизонтальном направлении.
17. Способ по п. 16, в котором множество частичных изображений, сфотографированных линейным массивом фотокамер с заданной частотой фотографирования, получают с помощью модуля получения изображения.
18. Способ по п. 16, в котором идентификация номера вагона по скорректированному изображению включает:
вырезание области номера вагона в скорректированном изображении с получением изображения области номера вагона;
сглаживание и цифровую обработку изображения области номера вагона;
идентификацию номера вагона с использованием средства для распознавания символов; и
автоматическую коррекцию идентифицированного номера вагона согласно правилу назначения номеров вагонов.
19. Система идентификации номера вагона, содержащая:
модуль получения изображения, предназначенный для получения множества частичных изображений инспектируемого вагона, которые генерируются путем непрерывного фотографирования инспектируемого вагона с использованием линейного массива фотокамер, движущегося относительно инспектируемого вагона;
модуль сшивания изображений, предназначенный для сшивания множества частичных изображений вагона с формированием сшитого изображения;
модуль коррекции изображения, предназначенный для коррекции искажений сшитого изображения с получением скорректированного изображения;
модуль идентификации номера вагона, предназначенный для идентификации номера вагона по скорректированному изображению;
при этом модуль коррекции изображения выполнен с возможностью:
получения отношения между горизонтальным расстоянием и вертикальным расстоянием изображения колеса, извлеченного из сшитого изображения, где горизонтальное расстояние - это расстояние между самой левой и самой правой точками колеса, а вертикальное расстояние - это расстояние между самой верхней и самой нижней точками колеса;
если это отношение больше первого заданного порога, сжатия сшитого изображения в горизонтальном направлении согласно этому отношению; а если это отношение меньше второго заданного порога, растягивания сшитого изображения в горизонтальном направлении.
20. Система по п. 19, в которой модуль получения изображения предназначен для получения множества частичных изображений, сфотографированных линейным массивом фотокамер с заданной частотой фотографирования.
21. Система по п. 19, в которой модуль идентификации номера вагона выполняет следующее:
вырезание области номера вагона в скорректированном изображении с получением изображения области номера вагона;
сглаживание и цифровую обработку изображения области номера вагона;
идентификацию номера вагона с использованием средства для распознавания символов; и
автоматическую коррекцию идентифицированного номера вагона согласно правилу назначения номеров вагонов.
22. Способ идентификации типа вагона, включающий:
идентификацию номера вагона согласно способу по любому из пп. 16-18; и
определение типа вагона согласно номеру вагона.
23. Способ по п. 22, в котором определение типа вагона согласно номеру вагона включает:
поиск указанного типа в базе данных или списке данных с использованием номера вагона.
24. Способ по п. 22, в котором определение типа вагона согласно номеру вагона включает:
прямое определение типа вагона по номеру вагона согласно правилу назначения номеров вагонов.
25. Система идентификации типа вагона, содержащая:
модуль идентификации номера вагона, предназначенный для идентификации номера вагона, по любому из пп. 19-21; и
модуль определения типа вагона, предназначенный для определения типа вагона согласно номеру вагона.
26. Система по п. 25, в которой модуль определения типа вагона предназначен для поиска указанного типа в базе данных или в списке данных с использованием номера вагона.
27. Система по п. 25, в которой модуль определения типа вагона предназначен для прямого определения типа вагона по номеру вагона согласно правилу назначения номеров вагонов.
28. Система по п. 25, в которой тип вагона представляет собой любое из следующего: локомотив, грузовой вагон и пассажирский вагон.
29. Система по п. 25, дополнительно содержащая:
модуль идентификации сцепки, предназначенный для определения мест сцепок вагонов; и
модуль разделения изображения, предназначенный для разбиения изображения поезда на множество субизображений вагонов согласно положениям сцепок.
30. Система для инспекции безопасности вагонов, содержащая:
систему идентификации типа вагона по любому из пп. 25-29; и
модуль управления облучением, предназначенный для того, чтобы, согласно типу инспектируемого вагона, определенному системой идентификации типа вагона, управлять источником облучения для облучения инспектируемого вагона первой дозой или необлучения инспектируемого вагона, если инспектируемый вагон - это локомотив или пассажирский вагон, и управлять источником облучения для облучения инспектируемого вагона второй дозой, если инспектируемый вагон - грузовой вагон, при этом первая доза меньше, чем вторая доза.
| Способ изготовления щелочных стаканчиковых элементов | 1959 |
|
SU133082A1 |
| Хроматографическдой экспресс-метод количественного анализа состава смесей 2-алкил- и 2,6-диалкилпиридинов с 3- или 4-алкилпиридинами | 1957 |
|
SU111936A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| CN 103679140 A, 26.03.2014 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |

