Предлагаемое техническое решение относится к области электротехники и может быть использовано для векторного управления явнополюсным синхронным двигателем с постоянными магнитами в условиях минимизации реактивной мощности, циркулирующей в обмотках двигателя, при линеаризации структуры формирования электромагнитного момента, за счёт подачи на обмотки статора переменного напряжения требуемой амплитуды и фазы. Изобретение может быть использовано в электроприводе транспорта, где в условиях ограничения тока и напряжения, подводимого к обмоткам двигателя, важно передать исполнительному механизму максимальную мощность путём формирования управления, обеспечивающего эффективную работу электрической машины.
Известно аналогичное техническое решение (патент RU № 2397601, МПК H02P 21/00; H02P 21/12; H02P 27/06, опубл. 20.08.2010), техническая сущность которого заключается в нижеследующей совокупности существенных признаков:
- формируют сигнал управления синхронным двигателем;
- преобразуют сигнал управления в два дополнительных сигнала задания, связанных с сигналом управления посредством аппроксимации нелинейных функций, для формирования переменного напряжения на обмотках двигателя требуемой амплитуды и фазы;
- измеряют фазные токи;
- преобразуют сигналы измеренных фазных токов с помощью сигналов датчика положения, механически связанного с ротором синхронного двигателя, в два сигнала обратной связи;
- сравнивают сформированные сигналы задания с преобразованными сигналами обратной связи и их разность подают на два регулятора;
- преобразуют сигналы с выхода регуляторов, используя гармонические сигналы датчика положения, в управляющие сигналы;
- управляющие сигналы преобразуют в импульсы широтно-импульсной модуляции для управления транзисторами силового блока преобразователя;
- подают управляющие импульсы на соответствующие входы силового преобразователя;
- транзисторы силового преобразователя посредством импульсов широтно-импульсной модуляции преобразуют постоянное напряжение, подводимое к соответствующим входам силового преобразователя, в переменное трёхфазное напряжение требуемой амплитуды и фазы;
- получают переменное трёхфазное напряжение;
- подают переменное трёхфазное напряжение через датчики тока на статорные обмотки явнополюсного синхронного электродвигателя;
- управляют синхронным электродвигателем.
Известно также аналогичное техническое решение (патент RU № 2805989, МПК H02P 21/22; H02P 21/12, опубл. 24.10.2023), которое выбрано в качестве ближайшего аналога прототипа и которое заключается в нижеследующей совокупности существенных признаков:
- формируют сигнал управления синхронным двигателем;
- преобразуют сигнал управления в два дополнительных сигнала задания, обеспечивающих формирование переменного напряжения, подводимого к обмоткам двигателя, требуемой амплитуды и фазы для формирования электромагнитного момента в условиях минимизации тепловых потерь;
- измеряют фазные токи;
- преобразуют сигналы измеренных фазных токов с помощью гармонических сигналов датчика положения, механически связанного с ротором синхронного двигателя, в два сигнала обратной связи;
- сравнивают сформированные сигналы задания с преобразованными сигналами обратной связи и их разность подают на два регулятора;
- преобразуют сигналы с выхода регуляторов, используя гармонические сигналы датчика положения, в управляющие сигналы;
- управляющие сигналы преобразуют в импульсы широтно-импульсной модуляции для управления транзисторами силового блока преобразователя;
- подают управляющие импульсы на соответствующие входы силового преобразователя;
- транзисторы силового преобразователя посредством импульсов широтно-импульсной модуляции преобразуют постоянное напряжение, подводимое к соответствующим входам силового преобразователя, в переменное трёхфазное напряжение требуемой амплитуды, частоты и фазы;
- получают переменное трёхфазное напряжение;
- подают переменное трёхфазное напряжение через датчики тока на статорные обмотки явнополюсного синхронного электродвигателя;
- управляют синхронным электродвигателем.
Общими признаками предлагаемого способа управления синхронным двигателем и выше охарактеризованными аналогичными техническими решениями являются:
- формируют два сигнала задания управления синхронным двигателем;
- измеряют фазные токи;
- преобразуют сигналы датчиков измеренных фазных токов в зависимости от гармонических сигналов датчика положения механически связанного с ротором синхронного двигателя в сигналы обратной связи;
- сравнивают сформированные сигналы задания с сигналами обратной связи и их разность подают на регуляторы;
- преобразуют сигналы с выхода регуляторов, используя гармонические сигналы датчика положения, в управляющие сигналы;
- управляющие сигналы преобразуют в импульсы широтно-импульсной модуляции для управления транзисторами силового блока преобразователя;
- подают управляющие импульсы на соответствующие входы силового преобразователя;
- транзисторы силового преобразователя посредством импульсов широтно-импульсной модуляции преобразуют постоянное напряжение, подводимое к соответствующим входам силового преобразователя, в переменное трёхфазное напряжение требуемой амплитуды и фазы;
- получают переменное трёхфазное напряжение;
- подают переменное трёхфазные напряжение через датчики тока на статорные обмотки явнополюсного синхронного электродвигателя;
- управляют синхронным электродвигателем.
Все вышеперечисленные признаки прототипа являются общими с предлагаемым для патентования техническим решением.
Технический результат, который невозможно достичь ни одним из аналогичных выше охарактеризованных технических решений, заключается в формировании напряжения, подводимого к обмоткам двигателя, такой величины и фазы, чтобы обеспечить его линейное управление при минимизации циркулирующей в его обмотках реактивной мощности, тем самым повышая эффективность использования мощности, подводимой к обмоткам двигателя в условиях ограничения тока и напряжения источника питания, что позволяет увеличить максимальную скорость двигателя и мощность, отдаваемую исполнительному механизму.
Причиной невозможности достижения вышеуказанного технического результата является отличие способа формирования управляющих воздействий.
Анализируя аналогичные технические решения и рассматривая их характеристики можно сделать вывод, что задача поиска способов и создания устройств управления, обеспечивающих более эффективное использование мощности при ограничении тока и напряжения, подводимого к обмоткам двигателя, обладающих высокой точностью регулирования, является актуальной на сегодняшний день. Решение этой задачи позволит снизить потери в стали, увеличить скорость и мощность, отдаваемую исполнительному механизму, за счёт повышения эффективности использования мощности, подводимой к обмоткам двигателя.
Технический результат, заключающийся в минимизации реактивной мощности, циркулирующей в обмотках двигателя, достигается тем, что в способе управления явнополюсным синхронным двигателем формируются два сигнала задания управления, посредством которых формируется трёхфазное напряжение требуемой амплитуды и фазы. За счёт вычисления положения векторов, при котором выполняется условие минимизация реактивной мощности, и линеаризации структуры управления, формируемое напряжение обеспечивает точное формирование электромагнитного момента при минимизации реактивной мощности.
Техническая сущность предлагаемого способа управления явнополюсным синхронным двигателем заключается в следующем:
- формируют два сигнала задания управления синхронным двигателем, обеспечивающие получение необходимого переменного трёхфазного напряжения для управления двигателем;
- измеряют фазные токи;
- преобразуют сигналы измеренных фазных токов с помощью гармонических сигналов датчика положения, механически связанного с ротором синхронного двигателя, в два сигнала обратной связи;
- сравнивают сформированные сигналы задания с преобразованными сигналами обратной связи и их разность подают на два регулятора;
- преобразуют сигналы с выхода регуляторов, используя гармонические сигналы датчика положения, в управляющие сигналы;
- управляющие сигналы преобразуют в импульсы широтно-импульсной модуляции для управления транзисторами силового блока;
- подают импульсы на соответствующие входы силового преобразователя;
- посредством широтно-импульсной модуляции преобразуют постоянное напряжение, подводимое к соответствующим входам силового преобразователя, в переменное трёхфазное напряжение;
- получают переменное трёхфазное напряжение;
- подают переменное трёхфазное напряжение через датчики тока на статорные обмотки синхронного электродвигателя;
- управляют синхронным электродвигателем.
При этом два сигнала задания, необходимых для организации трёхфазного напряжения требуемой амплитуды и фазы, формируют таким образом, чтобы регулирование электромагнитного момента осуществлялось в условиях минимизации реактивной мощности, циркулирующей в обмотках двигателя. За счёт точного вычисления положения вектора тока и линеаризации структуры управления, напряжение, подводимое к обмоткам двигателя, формируется с высокой точностью.
Положения векторов определено посредством аналитического преобразования реактивной мощности явнополюсного двигателя, при котором её величина равна нулю.
Линеаризация структуры управления осуществляется путём формирования нелинейных регуляторов, на вход которых подают разность сигналов задания и сигналов обратной связи.
Проведённый анализ совокупности существенных признаков предлагаемого к патентованию способа управления синхронным двигателем показал, что ни одно из известных технических решений не содержит, как всей совокупности существенных признаков, так и отличительных признаков, что позволило сделать вывод о наличии критериев патентоспособности «новизна» и «изобретательский уровень».
Предлагаемый способ управления явнополюсным синхронным двигателем можно пояснить, рассмотрев функциональную схему фиг. 1, реализующую предлагаемый способ управления синхронным двигателем.
Схема содержит:
- источник - 1 двух сигналов задания Vdref, Vqref обеспечивающих формирование напряжение двигателя 14 требуемой амплитуды и фазы. Формирование сигналов Vdref, Vqref задания осуществляется посредством вычисления положения вектора тока μopt, при котором достигается минимум реактивной мощности. Положение вектора тока μopt, определено с помощью сигнала ψ0, соответствующего величине потока постоянных магнитов, и сигналов id, iq, несущих полную информацию о мгновенных значениях фазных токах двигателя, полученных в результате прямого преобразования по схеме 6 сигналов датчиков тока 10, 11 и 12 системы А, В, С, в зависимости от сигналов sin(θ), cos(θ) датчика положения 13, механически связанного с ротором двигателя 14. Второй сигнал управления определяет задание mref электромагнитного (вращающего) момента;
- блок 2, где сравниваются сигналы задания Vdref, Vqref с сигналами обратной связи, сформированными в результате преобразования сигналов тока id, iq, полученными посредством преобразования в блоке 6;
- регуляторы 3 преобразует разностные сигналы  полученные в блоке 2 в результате сравнения, обеспечивая линейную зависимость электромагнитного момента и положения векторов от задания посредством регулирования напряжения, подводимого к обмоткам двигателя 14;
полученные в блоке 2 в результате сравнения, обеспечивая линейную зависимость электромагнитного момента и положения векторов от задания посредством регулирования напряжения, подводимого к обмоткам двигателя 14;
- преобразование 4 обеспечивает вычисление скорости двигателя в зависимости от сигналов с датчика положения 13;
- обратное 5 преобразование необходимо для преобразования сигналов с выхода блока регуляторов 3 с помощью гармонических сигналов sin(θ), cos(θ) датчика положения 13, механически связанного с ротором синхронного двигателя 14, в управляющие сигналы трёхфазной системы А, В, С, поступающие на формирователь импульсов 7 широтно-импульсной модуляции управления;
- прямое 6 преобразование обеспечивает преобразование сигналов с датчиков фазных токов системы А, В, С, посредством гармонических сигналов sin(θ), cos(θ) датчика положения 13, механически связанного с ротором синхронного двигателя 14 в сигналы id, iq, несущие полную информацию о мгновенных значениях фазных токов:
- формирование 7 импульсов управления обеспечивает преобразование сигналов управления трехфазной системы А, В, С полученных в результате преобразования 5 сигналов в импульсы широтно-импульсной модуляции для управления ключевыми элементами преобразователя 9;
- источник 8 постоянного напряжения;
- преобразователь 9 обеспечивает преобразование постоянного напряжения источника питания 8 в переменное трехфазное напряжение, подводимое к двигателю 14, посредством ключевых элементов, управление которыми осуществляется сформированными в 7 импульсами широтно-импульсной модуляции;
- датчики 10, 11 и 12 фазных токов трёхфазной системы А, В, С, сигналы с которых прямо преобразуются в блоке 6, посредством гармонических сигналов sin(θ), cos(θ) датчика положения 13, механически связанного с ротором синхронного двигателя 14 в сигналы id, iq, несущие полную информацию о фазном токе двигателя, соединяют выходы преобразователя 9 с синхронным двигателем 14;
- датчик 13 положения, механически связанный с ротором синхронного двигателя 14, формирует в функции электрического угла Ɵ положения ротора гармонические сигналы sin(θ), cos(θ);
- синхронный 14 явнополюсный двигатель с постоянными магнитами, на валу ротора которого установлен датчик положения 13.
Решения, входящие в состав функциональной схемы, реализующие способ управления явнополюсным синхронным двигателем с постоянными магнитами широко известны и опубликованы в различных источниках информации.
Предложенная функциональная схема фиг. 1, реализующая способ управления по минимуму тока синхронным двигателем отличается от известных решений узлами 1, 2 и 3, которые работают следующим образом.
Вектор напряжение U, подводится к обмоткам синхронного двигателя:
 , (1)
, (1)
 ;
;  ,
,
 ;
;  ;
;  ;
;  ,
,
 ;
;  ;
;  ,
,
 , (2)
, (2)
 , (3)
, (3)
 ,
,  ,
,
 ,
,  , (4)
, (4)
Ψ, I, U - векторы потокосцепления, тока и напряжения; R, L - матрицы сопротивлений и индуктивностей, Ψ0 - приведённое к обмоткам двигателя значение потока постоянных магнитов, N - матрица столбец, характеризующая ориентацию системы относительно потока Ψ0 постоянных магнитов, D - матрица поворота, J - приведённый к валу двигателя момент инерции, mс - момент статического сопротивления, ω - скорость вращения ротора, p - число пар полюсов, m - электромагнитный момент, Q - реактивная мощность (3), ΔP - потери в меди, Pm - потери в стали, при достаточно точном приближении сводятся к одной простой эмпирической формуле (4), где коэффициент Z зависит от формы и размеров постоянных магнитов (определён при номинальном режиме работы конкретной электрической машины), ϕ - угол, определяет положение вектора тока относительно ЭДС от потокосцепления статора. При некотором допущении соs(ϕ) не отличается от стандартной оценки, обусловленной фазовым сдвигом основной гармоники питающего двигатель напряжения относительно синусоидального тока статора.
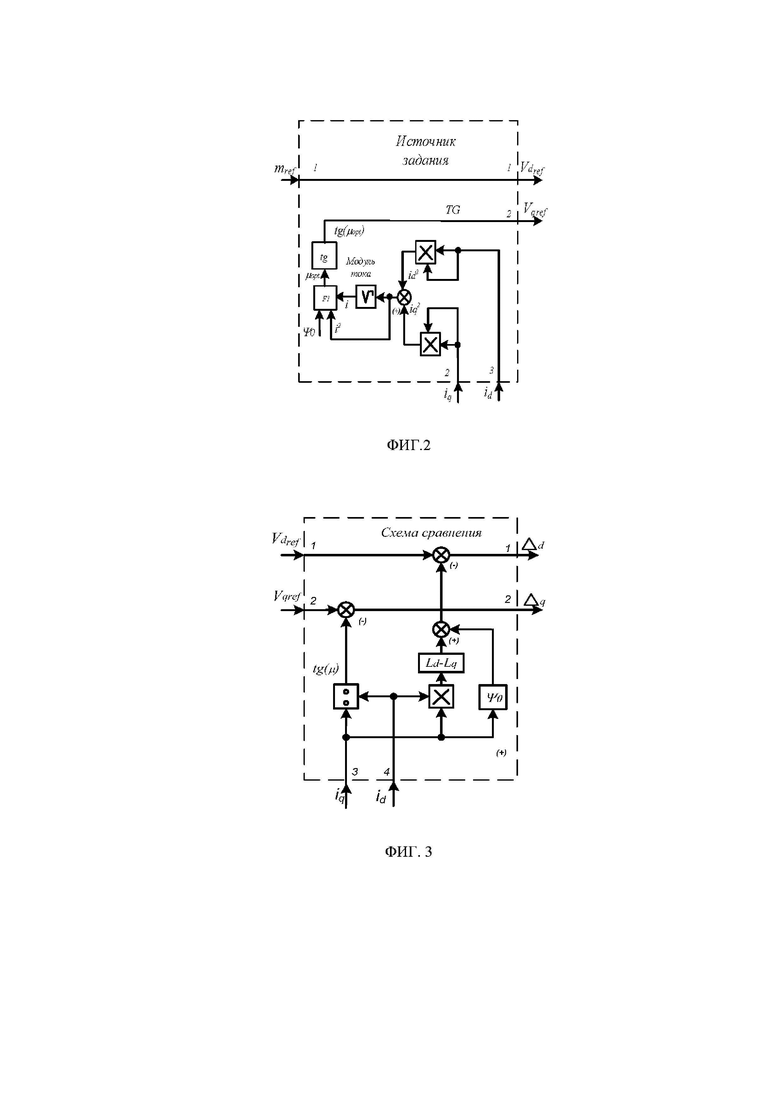
Задание управления фиг. 1 явнополюсным синхронным (1) двигателем 14, обеспечивающее формирование электромагнитного момента m (2) при минимизации (3) реактивной мощности Q, формируют в блоке 1 в виде двух сигналов Vdref, Vqref фиг. 2. Сигнал Vdref непосредственно получен от сигнала задания вращающего (электромагнитного) момента mref. Если есть контур тока, то сигнал mref формируется с выхода регулятора скорости. Сигнал Vqref сформирован посредством функционального преобразования в блоке F1, где с помощью дополнительных сигналов проекций вектора тока id, iq и постоянного сигнала, соответствующего величине постоянных магнитов  , формируется сигнал задания положения вектора тока μopt, при котором выполняются условия минимизации реактивной мощности Q (3) двигателя:
, формируется сигнал задания положения вектора тока μopt, при котором выполняются условия минимизации реактивной мощности Q (3) двигателя:
 ,
,

 , (5)
, (5)
 ;
;  . (6)
. (6)
Тангенс TG сигнала μopt определяет задание Vqref блока 1, тем самым, в совокупности с сигналом mref, определяет вектор задания Vref вектора Y выходных величин, формируемый посредством напряжения, подводимого к обмоткам двигателя. При положительном сигнале задания mref, сигнал  должен быть отрицательным, обеспечивая формирование сигналов управления при минимизации реактивной мощности Q в зависимости от модуля тока i.
должен быть отрицательным, обеспечивая формирование сигналов управления при минимизации реактивной мощности Q в зависимости от модуля тока i.
Поскольку вращающий момент двигателя m (2) и отношение токов id, iq (6), доставляющее минимум реактивной мощности Q, нелинейно зависят от токов id, iq, сформированных посредством напряжения (1), сигналы ud и uq вектора u следует преобразовать, линеаризуя структуру управления двигателем 14 путём определённого формирования вектора управления u. Для этой цели уравнение двигателя (1) приведено к следующему виду:
 , (7)
, (7)
 (8)
(8)
 ,
,
 ,
,
где Кр коэффициент усиления силовой части преобразователя. С помощью матриц  осуществляется преобразование нелинейных сигналов (8) в сигналы управления вектора
осуществляется преобразование нелинейных сигналов (8) в сигналы управления вектора  , для линеаризации структуры управления двигателем. В блоке 2 сравниваются фиг. 3 сигналы Vdref, Vqref вектора V задания и сигналы вектора (6) обратной связи Y:
, для линеаризации структуры управления двигателем. В блоке 2 сравниваются фиг. 3 сигналы Vdref, Vqref вектора V задания и сигналы вектора (6) обратной связи Y:
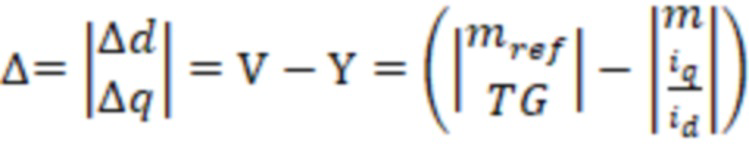 ;
;  ,
,
 .
.
Разностный сигал  с блока 2 подается на блок 3 нелинейных регуляторов фиг. 4, где в совокупности с сигналом
с блока 2 подается на блок 3 нелинейных регуляторов фиг. 4, где в совокупности с сигналом  = TG преобразуется и поступает на пропорциональные регуляторы Rd и Rq, выход которых в блоке 3 суммируется с сигналами
= TG преобразуется и поступает на пропорциональные регуляторы Rd и Rq, выход которых в блоке 3 суммируется с сигналами  , компенсирующими внутренние (перекрёстные) связи двигателя, образуя вектор управления u (7), обеспечивающего формирование требуемого выходного напряжения:
, компенсирующими внутренние (перекрёстные) связи двигателя, образуя вектор управления u (7), обеспечивающего формирование требуемого выходного напряжения:
 , (9)
, (9)
 .
.
Сформированный вектор напряжения U = uKp обеспечивает линейную зависимость вектора выходных величин Y от составляющих вектора задания V:
 ,
,
 ,
,
 . (10)
. (10)
Сигналы фиг. 1, с выходов регуляторов  блока 3 поступают на схему обратного преобразования 5, где посредством гармонических сигналов sin(Ɵ), cos(Ɵ) датчика положения 13, механически связанного с ротором синхронного двигателя 14, преобразуют в сигналы управления трехфазной системы А, В, С, которые подаются на формирователь импульсов 7, где в соответствии с сигналами управления А, В, С формируют импульсы управления широтно- импульсной модуляции, которые подаются на ключевые элементы преобразователя 9 постоянного напряжения 8 в трёхфазное напряжение, которое через датчики фазного тока 10,11 и 12 подаётся на обмотки синхронного двигателя 14, обеспечивая регулирование выходных величин при минимизации реактивной мощности за счёт нового способа управления, реализованного в блоках 1, 2 и 3.
блока 3 поступают на схему обратного преобразования 5, где посредством гармонических сигналов sin(Ɵ), cos(Ɵ) датчика положения 13, механически связанного с ротором синхронного двигателя 14, преобразуют в сигналы управления трехфазной системы А, В, С, которые подаются на формирователь импульсов 7, где в соответствии с сигналами управления А, В, С формируют импульсы управления широтно- импульсной модуляции, которые подаются на ключевые элементы преобразователя 9 постоянного напряжения 8 в трёхфазное напряжение, которое через датчики фазного тока 10,11 и 12 подаётся на обмотки синхронного двигателя 14, обеспечивая регулирование выходных величин при минимизации реактивной мощности за счёт нового способа управления, реализованного в блоках 1, 2 и 3.
Таким образом, предлагаемый для патентования способ управления явнополюсным синхронным двигателем, за счёт двух сигналов задания Vdref, Vqref, сформированными посредством задания электромагнитного момента mref и задания положения векторов μopt, при котором достигается минимизация реактивной мощности, сформированными сигналами обратной связи и нелинейного регулятора блока 3, обеспечивающего линеаризацию структуры управления синхронным двигателем, подавая на статорные обмотки переменное трёхфазное напряжение, позволяет осуществить управление явнополюсным синхронным двигателем в условиях минимизации реактивной мощности, циркулирующей в обмотках двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ВОЗБУЖДЕНИЕМ ОТ ПОСТОЯННЫХ МАГНИТОВ | 2022 |
|
RU2805989C2 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Электропривод с синхронным двигателем | 1972 |
|
SU553948A3 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Способ управления активным двунаправленным преобразователем частоты | 2015 |
|
RU2628666C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРОМ С БЛОКОМ ФОРМИРОВАНИЯ ЗАДАННЫХ ЗНАЧЕНИЙ ТОКА ВОЗБУЖДЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА ТОКА СТАТОРА ПО ПРОДОЛЬНОЙ И ПОПЕРЕЧНОЙ ОСЯМ | 2000 |
|
RU2200871C2 |
| Способ управления синхронным электродвигателем на постоянных магнитах | 2018 |
|
RU2683586C1 |
| Устройство для управления асинхронизированной синхронной машиной | 1980 |
|
SU904178A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2115218C1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |


Изобретение относится к области электротехники и может быть использовано для векторного управления явнополюсным синхронным двигателем с постоянными магнитами. Технический результат предлагаемого решения заключается в повышении эффективности использования мощности, подводимой к обмоткам двигателя в условиях ограничения тока и напряжения источника питания, что позволяет увеличить максимальную скорость двигателя и мощность, отдаваемую исполнительному механизму. Этот результат достигается за счёт вычисления положения вектора тока, при котором выполняется условие минимизации реактивной мощности и линеаризации структуры управления путём формирования нелинейных сигналов, подаваемых на регуляторы. Техническая сущность предлагаемого способа управления явнополюсным синхронным двигателем заключается в следующем. Формируют два сигнала задания, измеряют фазные токи, преобразуют сигналы измеренных фазных токов в два сигнала обратной связи, сравнивают сформированные сигналы задания с сигналами обратной связи и их разность подают на два регулятора, преобразуют сигналы с выхода регуляторов, используя гармонические сигналы датчика положения. Преобразованные сигналы посредством широтно-импульсной модуляции преобразуют в управляющие импульсы. Подают управляющие импульсы на соответствующие входы силового преобразователя, преобразуют посредством широтно-импульсной модуляции постоянное напряжение, подводимое к соответствующим входам силового преобразователя, в переменное трёхфазное напряжение, получают переменное трёхфазное напряжение, подают переменное трёхфазное напряжение, на статорные обмотки синхронного электродвигателя, управляют синхронным двигателем. 4 ил.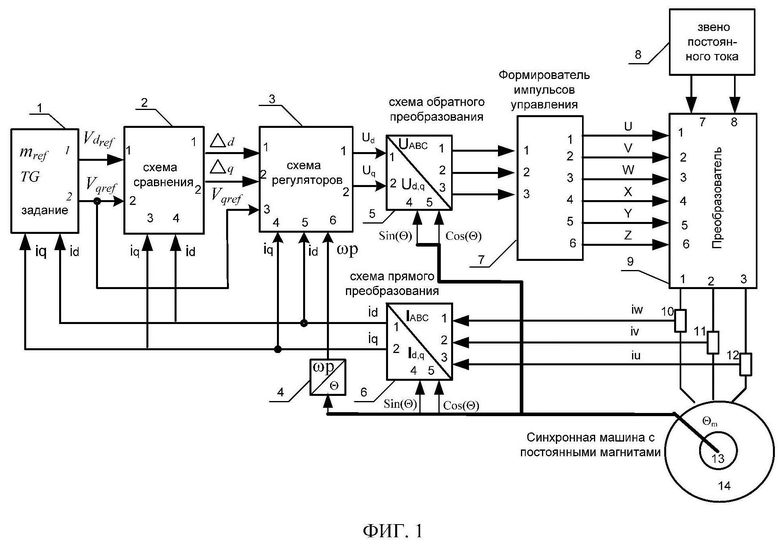
Способ управления явнополюсным синхронным электродвигателем с возбуждением от постоянных магнитов, организованный посредством векторного управления при минимизации реактивной мощности, циркулирующей в обмотках двигателя, заключающийся в том, что формируют два сигнала, обеспечивающие формирование напряжения, подводимого к обмоткам двигателя, сравнивают сигналы задания с сигналами обратной связи, получают разность этих сигналов и подают на регуляторы, преобразуют сигналы с выхода регуляторов в управляющие импульсы широтно-импульсной модуляции, подают управляющие импульсы на соответствующие входы преобразователя напряжения, преобразуют постоянное напряжение в переменное трёхфазное напряжение, подводимое к статорным обмоткам синхронного двигателя, управляют синхронным двигателем, отличающийся тем, что один сигнал задания формируют путём вычисления положения вектора тока, при котором реактивная мощность, циркулирующая в обмотках двигателя, равна нулю, сравнивают два сигнала задания, необходимые для организации трёхфазного напряжения требуемой амплитуды и фазы, с соответствующими сигналами обратной связи, полученными в результате преобразования сигналов с датчиков тока, получают разность этих сигналов, соответствующим образом преобразуют и подают на регуляторы.
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ВОЗБУЖДЕНИЕМ ОТ ПОСТОЯННЫХ МАГНИТОВ | 2022 |
|
RU2805989C2 |
| CN 102710210 A, 03.10.2012 | |||
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ТЯГИ И СИЛОВОЙ ПЕРЕДАЧИ C СИНХРОННЫМ ДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ | 2018 |
|
RU2740000C1 |
| УСТРОЙСТВО ВЕКТОРНОГО УПРАВЛЕНИЯ ДВИГАТЕЛЯ С СИНХРОНИЗАЦИЕЙ НА ПОСТОЯННОМ МАГНИТЕ | 2006 |
|
RU2397601C1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |

