ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу и системе сбора и обработки данных о состоянии объекта произвольной геометрии, в частности, о геометрических, физических, включая радиационные, и химических характеристиках объекта использования атомной энергии, остановленного для вывода из эксплуатации.
УРОВЕНЬ ТЕХНИКИ
Жизненный цикл объекта использования атомной энергии как любого сложного техногенного объекта в общем виде включает четыре стадии: проектирование, строительство, эксплуатация и вывод из эксплуатации (утилизация).
Отличительной особенностью объектов атомной энергетики и атомной промышленности в целом, от иных промышленных объектов, является наличие радиационного загрязнения, что делает невозможным прямое участие и нахождение персонала в определенных операциях и зонах объекта, а также радиоактивных отходов, накопленных за период его эксплуатации и массово образующихся при выводе из эксплуатации.
Соответствующие особенности остановленного объекта атомной энергии создают повышенные угрозы безопасности персонала, населения прилегающий территорий и окружающей среды. Необходимость минимизации возникающих угроз приводит к тому, что стадия вывода из эксплуатации объектов атомной энергетики является обязательной, а сам вывод из эксплуатации достаточно дорогостоящей стадией жизненного цикла. (Для некоторых типов объектов использования атомной энергии стоимость реализации вывода из эксплуатации может быть сопоставима со стоимостью сооружения объекта.)
Проблема обеспечения безопасности вывода из эксплуатации усугубляется и тем, что длительность стадии вывода из эксплуатации объектов использования атомной энергии в целом, зачастую, сопоставима с длительностью стадии эксплуатации объекта (30 и более лет), что требует наличия эффективной технологии сбора, обработки и анализа данных о реальном состоянии объекта как при подготовке к выводу из эксплуатации, так и непосредственно в процессе вывода из эксплуатации.
Выполнение практических работ по выводу из эксплуатации связано с повышенными дозовыми радиационными нагрузками на персонал, осуществляющий демонтажные и иные операции. Оптимизация дозовых радиационных нагрузок на персонал оказывает существенное влияние на общую затратность и безопасность вывода из эксплуатации. Помимо радиационных нагрузок на персонал, который осуществляет практические работы по выводу из эксплуатации, другим фактором, значительно влияющим на стоимость вывода из эксплуатации, являются затраты на обращение с радиоактивными отходами, массово образующимися при демонтаже оборудования, систем, строительных конструкций, включая затраты на переработку и захоронение образующихся радиоактивных отходов.
Совокупность указанных проблем стадии вывода из эксплуатации объектов использования атомной энергии и безусловность осуществления этой стадии жизненного цикла в полном объеме снижает привлекательность и конкурентоспособность атомной энергетики перед другими видами генерации электроэнергии.
Международным агентством по атомной энергии (МАГАТЭ) разработаны рекомендации, закрепленные в нормативно-технической документации национальных регуляторов в области использования атомной энергии о процедурах (этапах) проведения работ по выводу из эксплуатации ОИАЭ.. Одним из этапов вывода ОИАЭ из эксплуатации является комплексное инженерное и радиационное обследование (КИРО), которое выполняется с целью получения информации, необходимой планирования работ и разработки проектной документации на вывод из эксплуатации. С учетом особенностей ОИАЭ и возможных вариантов его вывода из эксплуатации в ходе КИРО ОИАЭ получают данные, характеризующие фактическое состояние ОИАЭ на момент проведения обследования и позволяющие оценить состояние ОИАЭ на момент начала и в ходе его вывода из эксплуатации. В результате становится возможным планирование мероприятий по подготовке к выводу и собственно выводу из эксплуатации ОИАЭ. При этом сведения, полученные при КИРО, в современных документах МАГАТЭ публикациях МАГАТЭ и ряде последних руководств по безопасности по проведению КИРО ОИАЭ Ростехнадзора рекомендуется представлять в виде цифровой инженерно-радиационной модели, под которой понимается логико-математическое представление в цифровой форме зданий, сооружений, систем и элементов ОИАЭ, объектов на площадке ОИАЭ и топологических отношений между ними, включающее данные об их техническом и радиационном состоянии.
Одной из ключевых задач КИРО является оценка объемов образования радиоактивных отходов всех классов, которые будут образовываться при выводе из эксплуатации.
Для получения такой оценки необходимо решить так называемую «обратную задачу» - восстановить удельную активность находящихся внутри пространства ОИАЭ компонентов по пространственному распределению радиационных измерений.
Из уровня техники известны решения, направленные на подготовку и проведение КИРО.
Из заявки на патент США US2016203240 известен способ моделирования пространства, имеющего риск заражения радионуклидами. Способ предполагает обследование пространства при помощи платформы с датчиками, перемещаемой человеком или дроном, с дальнейшим построением распределения измеренных характеристик в объеме обследуемого помещения и определения уровня радиоактивной загрязненности элементов в объеме помещения. Недостатками указанного технического решения являются невозможность измерить уровень альфа- и бета- излучений; итоговая объемная карта свойства пространства не является цифровой исполнительной радиационной моделью помещения, поскольку в указанном техническом решении не предполагается распознавание отдельных элементов внутри помещения с учетом их свойств и атрибутов; способ моделирования распределения радиационных характеристик не позволяет дифференцировать собственное излучение, вызванное радиоактивной загрязненностью элемента от излучения, возникшего в результате процессов рассеяния/накопления излучения элементом как барьером к излучению других источников.
В заявке на патент США US2015155062 описан способ определения уровня объемного загрязнения элемента цилиндрической формы, который подвергается дискретизации на множество трехмерных элементов; способ включает построение и решение системы линейных уравнений относительно уровня объемного загрязнения, при этом коэффициенты при неизвестных зависят от геометрических и физических характеристик источника ионизирующего излучения и могут быть вычислены заранее, а для решения системы требуется провести такое количество измерений, которое равно количеству исследуемых ИИИ. Недостатком данного технического решения является чрезмерно упрощенная геометрия объекта; задача решаема только для самых простых вариантов геометрии при небольшом числе источников излучения, остальные технологические элементы в модели могут быть только незагрязненными барьерами, излучающими только в результате накопления излучения от проходящего через них единственного загрязненного изотопами источника; кроме того, в решении не учитывается приборная погрешность датчиков.
Те же недостатки присущи и работе «Расчетное моделирование радиационных характеристик объектов ядерной техники на заключительных стадиях их жизненного цикла» (Блохин П.А. диссертация на соискание ученой степени кандидата технических наук: Институт проблем безопасного развития атомной энергетики РАН, 2019); кроме того, расчет проводится в течение весьма длительного времени.
Предлагаемое техническое решение направлено на устранение недостатков известного уровня техники и обеспечивает следующие технические результаты:
а) повышение точности оценки объемов образования радиоактивных отходов вследствие построения модели ОИАЭ, учитывающей физические особенности процессов распространения ионизирующего излучения;
б) обеспечение возможности построения цифровой инженерно-радиационной модели ОИАЭ без ограничения количества или сложности элементов, расположенных в ОИАЭ, и любого их расположения;
в) снижение времени, потребного для построения ЦИИРМ и, соответственно, проведения КИРО в целом;
г) снижение угрозы здоровью персонала при проведения КИРО вследствие применения технологий дистанционного сбора данных.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Поставленные задачи решаются, а технические результаты достигаются за счет того, что заявлен способ построения цифровой исполнительной инженерно-радиационной модели остановленного для вывода из эксплуатации объекта использования атомной энергии ОИАЭ, включающий следующие этапы: (S1) выполняют лазерное сканирование и сферическое фотографирование по меньшей мере одного помещения ОИАЭ с получением объектов помещения, сопоставляют полученные объекты помещения с библиотекой САПР-моделей и цифровых схем объекта ОИАЭ для идентификации объектов помещения, и формируют цифровую исполнительную инженерную модель (ЦИИМ) указанного меньшей мере одного помещения ОИАЭ;
(S2) аппроксимируют каждый из объектов помещения ЦИИМ геометро-физическими примитивами, формируя фантомную модель помещения;
(S3) измеряют мощность эквивалентной дозы в заранее определенных точках каждого из по меньшей мере одного помещения ОИАЭ;
(S4) решают обратную задачу, определяя величину уровня радиоактивного загрязнения каждого из фантомов с учетом измеренной мощности эквивалентной дозы;
(S5) определяют элементы внутри каждого из по меньшей мере одного из помещений ОИАЭ, предположительно являющиеся источниками α- и/или β- излучения, и проводят обследование поверхностей указанных элементов с целью выявления источников α- и/или β- излучения;
(S6) получают цифровую исполнительную инженерно-радиационную модель исследуемого помещения.
Поставленные задачи решаются, а технические результаты достигаются также за счет того, что на этапе S1 получение массива данных лазерного сканирования и сферического фотографирования, а на этапе S5 обследование поверхностей элементов с целью выявления источников α- или β- излучения осуществляют дистанционно посредством автономных движущихся устройств.
Поставленные задачи решаются, а технические результаты достигаются также за счет того, что заявленный способ дополнительно включает этап S7 получения отчета, включающего объемы образующихся первичных отходов, загрязненных радионуклидами, и/ или промышленных отходов.
Поставленные задачи решаются, а технические результаты достигаются также за счет того, что заявлена система для построения цифровой исполнительной инженерно-радиационной модели остановленного для вывода из эксплуатации объекта использования атомной энергии, содержащая подсистему сбора данных СД, выполненную с возможностью сбора геометрических и радиационных данных в привязке к локальным координатам ограниченного пространства произвольной геометрии с размещенными в нем объектами, включающую множество автономных движущихся устройств, оснащенных датчиками для сбора данных; управляющую станцию, включающую по меньшей мере одну базовую метку; модуль запуска-останова автономных движущихся устройств; подсистему построения цифровой исполнительной инженерной модели ЦИИМ, включающую модуль ЦИИМ хранения данных, модуль ЦИИМ ввода-вывода данных, вычислительный модуль ЦИИМ, модуль жизнеобеспечения ЦИИМ; подсистему построения ЦИИРМ, включающую модуль ЦИИРМ хранения данных, модуль ЦИИРМ ввода-вывода данных, вычислительный модуль ЦИИРМ, модуль жизнеобеспечения ЦИИРМ.
КРАТКОЕ ОПИСАНИЕ ФИГУР
На фиг. 1 показаны основные этапы способа построения цифровой исполнительной инженерно-радиационной модели в соответствии с заявленным изобретением.
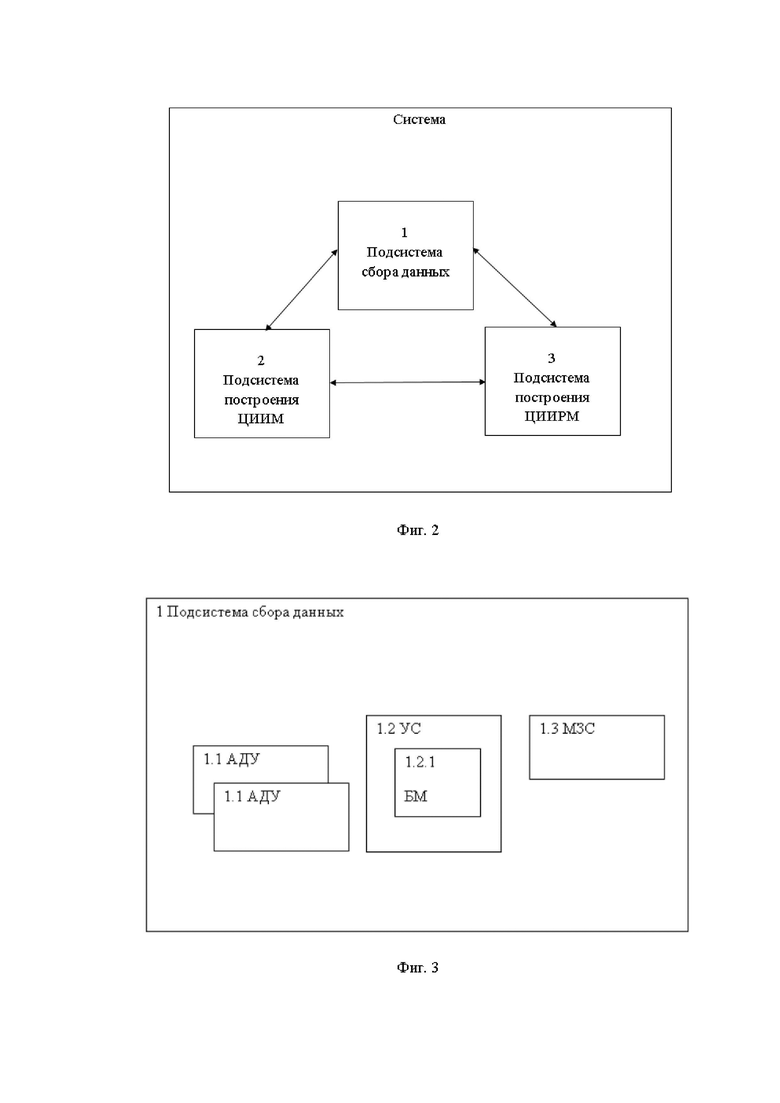
На фиг. 2 показаны основные компоненты системы, реализующей заявленный способ.
На фиг. 3 показаны компоненты подсистемы сбора данных заявленной системы.
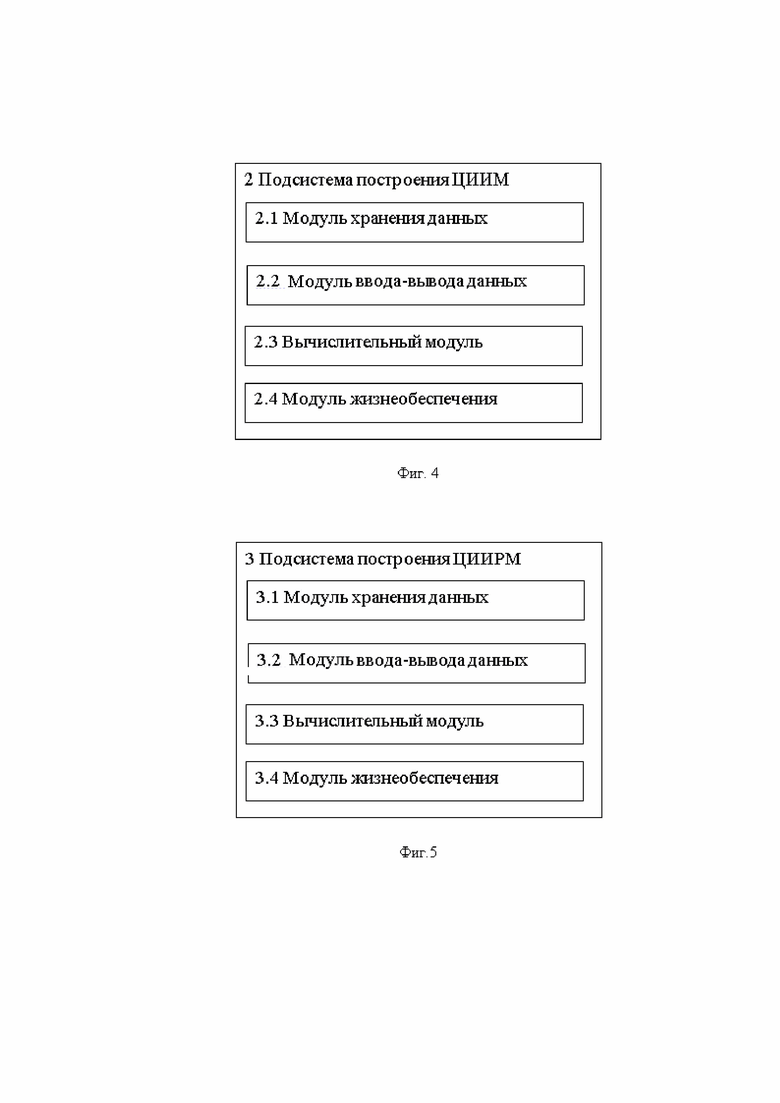
На фиг. 4 показаны компоненты подсистемы создания цифровой исполнительной инженерной модели (ЦИИМ) заявленной системы.
На фиг. 5 показаны компоненты подсистемы создания цифровой исполнительной инженерно-радиационной модели (ЦИИРМ) заявленной системы.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Далее со ссылками на фигуры будут подробно раскрыты варианты осуществления заявленного способа и соответствующая система, реализующая указанный способ.
На фигуре 1 показаны основные этапы способа построения цифровой исполнительной инженерно-радиационной модели.
Задачей первого этапа является получение цифровой исполнительной инженерной модели (ЦИИМ) каждого из помещений объекта использования атомной энергии.
Под ЦИИМ здесь и далее понимается логико-математическое представление в цифровой форме зданий, сооружений, систем и элементов ОИАЭ, объектов на площадке ОИАЭ и топологических отношений между ними, включающее данные об их техническом состоянии и не включающее данные об их радиационных характеристиках.
В теории каждое изменение в конструкции здания ОИАЭ, а также в комплектации, состоянии и размещении оборудования в пределах помещений ОИАЭ должно сопровождаться соответствующей проектно-технической документацией. Предполагается, что для каждого элемента оборудования известны все его характеристики, включая расположение, назначение, модель, массо-габаритные характеристики, режимы работы, материал, актуальное состояние, процент износа и т.д. В этом случае построение ЦИИМ заключается, по существу, в построении объемной модели ОИАЭ на основе имеющейся конструкторско-технической документации.
Однако на практике зачастую такая документация оказывается недостоверной, либо не полной, либо вообще отсутствует. Поэтому возникает необходимость актуализации данных о состоянии всех элементов конструкций и технологического оборудования, размещенных в пределах ОИАЭ, путем проведения обследования каждого из помещений ОИАЭ.
В общем случае ОИАЭ на этапе подготовки к выводу из эксплуатации включает по меньшей мере одно, а чаще – множество насыщенных оборудованием помещений, которые представляют радиационную опасность для пребывания персонала. Поэтому сбор данных о техническом состоянии элементов внутри ОИАЭ для построения ЦИИМ целесообразно проводить дистанционно, без участия или с минимальным участием человека. Оптимальным решением здесь служит применение автономных движущихся устройств (далее АДУ), таких как дроны, самоходные тележки и тому подобные устройства. При этом, руководствуясь техническим решением в соответствии с патентом RU2683993, сбор данных возможно осуществлять без использования предварительно созданного плана помещений и размещенных в нем объектов, без предварительной подготовки ограниченного пространства, без уточнения координат автономных движущихся устройств в процессе их перемещения, а также без использования систем определения абсолютных (глобальных) координат автономных движущихся устройств.
Интересующие данные представляют собой результаты лазерного сканирования и пространственно-привязанные данные сферического фотографирования каждого из помещений ОИАЭ. Обрабатывая полученные данные известными в уровне техники способами, получают единый пространственный массив данных (ЕПМД), отражающий геометрическую структуру исследуемого помещения в привязке к определенным в процессе обследования локальным координатам.
Далее, для идентификации всех элементов, находящихся в каждом из обследуемых помещениях, необходимо сравнить данные ЕПМД с опорными данными.
Для этого до проведения обследования формируют библиотеку опорных данных.
Библиотека опорных данных включает в себя данные четырех типов, которые формируются преимущественно на основе имеющейся конструкторско-технической документации.
Первый тип опорных данных включает в себя цифровые схемы объекта исследования (ЦСОИ). Под ЦСОИ понимаются цифровые схемы, отражающие технологические, электротехнические, вентиляционные, канализационные, газоснабжающие и другие инженерно-технологические системы исследуемого объекта. Каждый из элементов на схеме маркируется кодом и соответствующими атрибутами. ЦСОИ формируются на основе набора данных об обследуемом помещении, который создавался на соответствующих стадиях жизненного цикла исследуемого объекта, включающих по меньшей мере одну из группы, содержащей стадию проектирования ОИАЭ, стадию сооружения ОИАЭ, стадию эксплуатации ОИАЭ, в цифровом виде. В частности, к таким данным относятся проектно-сметная документация, исполнительная документация, технологические схемы помещения, документация о проведении плановых и внеплановых работ по обслуживанию и ремонту объектов внутри помещения и конструктивных элементов самого помещения, данные о проведенных заменах и модернизации компонентов оборудования в исследуемом помещении, данные об авариях, связанных с утечкой и образованием источников ионизирующего излучения. При этом каждому элементу, отраженному в архивной документации и характеризующему объект и/или конструктивные элементы исследуемого помещения, сопоставлены его атрибуты, например, габариты, масса (удельная масса для линейных элементов), химический и физический состав жидких и газообразных сред внутри трубопроводов, химические и физические показатели материала, из которого изготовлен данный элемент.
Второй тип опорных данных включает в себя каталог типовых элементов, характерных для данного помещения ОИАЭ и выполненных в виде объемных цифровых моделей в системах автоматизированного проектирования (3Д-САПР-модели). Элементы кодируются и атрибутируются аналогично опорным данным первого типа. Номенклатура САПР-моделей соответствует технологическим и конструктивным элементам объекта исследования, которые предположительно (в соответствии с ЦСОИ) расположены в объеме исследуемого помещения. Так, САПР-моделями представляют компоненты систем вентиляции, трубопроводов, насосов; ограждений, лестниц, кран-балок, колонн и т.п. Кроме того, в библиотеке 3Д-САПР-элементов могут содержатся САПР-модели, представляющие собой геометрические примитивы, например, сферы, шары, полнотелые и пустотелые призмы, цилиндры, параллелепипеды.
Первый и второй тип данных в совокупности представляют собой объектно-схематическую цифровую модель (ОСЦМ) исследуемого помещения.
Третий тип опорных данных включает в себя скан-копии технической документации, реализованной, как правило, в виде двумерных чертежей, при их наличии. При этом каждый из объектов также маркируется кодом и соответствующими атрибутами, аналогично опорным данным первого типа. В дальнейшем при построении ЦИИМ эти документы могут быть автоматически, в соответствии с кодами, привязаны к трехмерной модели, входящей в ЦИИМ.
Четвертый тип опорных данных включает в себя радионуклидный вектор, который может быть получен на основании спектрометрических исследований обследуемого помещения и/ или радиохимического анализа образцов, взятых из обследуемого помещения. Указанные данные могут быть получены заранее в процессе подготовительных работ стандартными методиками. Альтернативно, указанные данные могут быть получены на одном из последующих этапов заявленного способа путем обследования помещения при помощи автономных движущихся устройств специального типа.
Получив единый пространственный массив данных (ЕПМД), проводят сопоставление ЕПМД с ОСЦМ и идентифицируют элементы, отраженные в ЕПМД. Затем замещают набор данных ЕПМД, соответствующий идентифицированному элементу, 3Д-САПР-моделью данного элемента. Таким образом формируют ЦИИМ.
Альтернативно, сопоставление ЕПМД с опорными данными, распознавание элементов и замещение элементов 3Д-САПР-моделями проводят не по завершении этапа обследования, а в режиме реального времени по мере появления достаточного для идентификации множества данных ЕПМД.
Целью следующего этапа является формирование гипотезы об источниках ионизирующего излучения для каждого из обследуемых помещений, расположенных в пределах ОИАЭ.
Для этого каждый из 3D-САПР-объектов модели ЦИИМ, соответствующих реальным технологическим объектам и конструкционным элементам, представляют в упрощенном виде, аппроксимируя геометрическими примитивами.
В группу геометрических примитивов могут входить, например, полнотелый параллелепипед, пустотелый параллелепипед, полнотелый цилиндр, пустотелый цилиндр, и другие подобные геометрические формы.
При этом отдельные грани пустотелых параллелепипедов и основания цилиндров могут отсутствовать, имитируя днища, крышки и не заглушенные с торцов трубы.
Для пустотелых геометрических примитивов задают толщину стенки, рассчитанную с учетом толщины стенки упрощаемого 3D-САПР-объекта.
Объекты сложной формы, например, изогнутые трубы, представляют набором примитивов простой формы. Многокомпонентные объекты, такие как задвижки, насосы и тому подобное технологическое оборудование, аппроксимируют полнотелыми примитивами. При этом используется допущение, заключающееся в том, что все материальные характеристики входящих в объект компонентов гомогенизируют по объему аппроксимирующего данный объект полнотелого примитива или набора примитивов. В результате материальные характеристики всех компонентов, входящих в данный многокомпонентный объект, моделируются условным композитным материалом, физические характеристики которого автоматически определяются в виде таблиц по характеристикам материалов исходных компонентов указанного многокомпонентного 3D-САПР-объекта. Причем плотность определяется как общая масса, деленная на общий объем, а таблицы барьерных свойств композитного материала составляются в функциях энергии гамма-излучения и оптической толщины барьера.
Габаритные размеры примитивов, которыми аппроксимируется 3D-САПР-объект, задаются не меньшими, чем размеры данного 3D-САПР-объекта.
Полученные в результате аппроксимации упрощенные геометрическо-физические представления 3D-САПР-объектов именуют фантомами. Указанные фантомы наследуют все материальные характеристики исходных объектов, включая габариты и морфологический состав материалов, входящих в состав объектов. Координаты фантомов задаются в соответствии с координатами исходных объектов, полученных при построении ЦИИМ.
При этом принимаются следующие допущения:
a) каждый фантом представляет собой отдельный источник ионизирующего гамма-излучения с набором излучающих изотопов и с соответствующим этим изотопам набором энергий с парциальными коэффициентами гамма-излучения. Причем набор излучающих изотопов у разных фантомов может быть различным, если это известно по результатам предварительных спектральных измерений в помещении; иначе говоря, если заранее известен радионуклидный вектор;
b) каждый фантом является барьером на траектории от другого фантома – источника ионизирующего излучения до точки измерения мощности экспозиционной дозы гамма-излучения (МЭД), если находится на этой траектории, причем энергозависимые характеристики барьеров определяются спектром излучения фантома-источника;
c) пустотелые фантомы имеют поверхностное загрязнение внутренней поверхности радиоактивными гамма-излучающими изотопами;
d) полнотелые фантомы имеют объемное загрязнение радиоактивными гамма-излучающими изотопами;
e) уровень загрязнения по объему данного полнотелого фантома или по внутренней поверхности данного пустотелого фантома считается одинаковым, что является условием разделения объекта на отдельные фантомы, если из физических соображений по его объему или поверхности предполагается различный уровень радиоактивного загрязнения;
f) фантомы в пространстве не пересекаются, то есть не имеют общих объемов, за исключением возможного варианта нахождения фантомов внутри пустотелого фантома, например, если отдельным пустотелым фантомом представляется помещение;
g) поглощающие и рассеивающие свойства всех материалов фантомов считаются известными или для композитных материалов рассчитываются на основании свойств их компонентов, в частности для гомогенизированных сред.
Таким образом, получают структуру, состоящую из фантомов, расположенных в пространстве исследуемого помещения. Каждому из фантомов присваивается имя в виде номера j от 1 до J.
Далее для каждого из обследуемых помещений ОИАЭ определяют координаты точек в системе координат помещения, определенных на этапе создания ЦИИМ, в которых необходимо провести измерение МЭД. Одним из условий выбора точки является то, что ее координаты не находятся внутри любого из фантомов. Таким образом получают множество точек i от 1 до I для измерения МЭД.
Далее каждый фантом подвергают трехмерной дискретизации, или разбиению, на некоторое множество элементарных объемов. При этом в зависимости от симметрии геометрического примитива дискретизацию проводят в декартовых xyz или в полярных rφz координатах. Каждый из указанного множества элементов считается источником ионизирующего излучения (ИИИ) и барьером на пути от другого ИИИ до точки измерения МЭД, если находится на соответствующей траектории. Специалисту в области техники понятно, что с увеличением степени дискретизации, то есть, с ростом количества элементов фантома, точность расчетов будет повышаться. С другой стороны, увеличение степени дискретизации приведет к росту объема вычислительных операций и длительности расчетов. Соответственно, возникает необходимость определения оптимальной степени дискретизации для каждого из J фантомов.
Авторами изобретения с помощью расчетов было показано, что, в отличие от физических свойств материалов и геометрии реальных объектов, величина уровня радиоактивного загрязнения фантома не влияет на результаты оптимизации его дискретизации. Поэтому, с целью нахождения оптимальной степени дискретизации, каждому из фантомов на время процесса оптимизации присваивается конкретное численное значение уровня загрязнения, например, равное 10000 единиц.
Далее каждый из фантомов подвергают дискретизации на два набора элементов по каждой из координат. Например, первая дискретизация j-того фантома включает 27 элементов: [3;3;3]; вторая дискретизация того же j-того фантома включает 125 элементов: [5,5,5].
Затем решают прямую задачу «один фантом – много точек измерения», т.е. находят суперпозицией значение МЭД для указанного фантома в каждой i-той из определенного ранее множества точек, в которых запланировано измерение МЭД.
Решая прямую задачу для первого и для второго варианта дискретизации в каждой i-той из определенного ранее множества точек, получают расчетные значения МЭД для каждой i-той точки. Определяют разницу между рассчитанными значениями для каждой i-той точки для первого и второго варианта дискретизации. Далее определяют точку пространства imax, в которой указанная разница максимальна. Эту точку принимают за максимально чувствительную точку расчета для данного j фантома imax j.
Затем решают оптимизационную задачу дискретизации «один фантом-одна точка». Для этого произвольно выбирают минимальный коэффициент дискретизации по трем координатам для данного фантома, например, [2,2,2] и производят расчет значения МЭД в точке imax j. После этого увеличивают в два раза дискретизацию по одной из координат, а остальные фиксируют (например, [4,2,2]) и повторяют расчет в той же точке. Результаты сравнивают. Если разница между вычисленными значениями меньше заданной пороговой величины, например, 1%, то меньший из двух варьируемых коэффициентов дискретизации по данной координате считается удовлетворительным и фиксируется, после чего переходят к варьированию коэффициента по следующей координате. Если же разница между вычисленными значениями превышает пороговую, то разбиение по первой координате увеличивают еще в два раза ([8,2,2], потом по необходимости до [16,2,2], [32,2,2] и т.д.), пока разница между рассчитанными МЭД для двух последовательных разбиений не окажется меньше порогового значения. После этого процедуру повторяют для второй и третьей координаты.
Совершив аналогичные действия последовательно для каждого из фантомов, получают коллекцию оптимизированной дискретизации каждого из фантомов данного исследуемого помещения из множества помещений ОИАЭ.
Целью следующего этапа является решение обратной задачи для определения уровня радиоактивного загрязнения каждого из фантомов и, соответственно, каждого технологического объекта, аппроксимированного данным фантомом.
Для определения уровня мощности экспозиционной дозы проводят измерения МЭД в каждой i-той точке из определенных ранее. Полученные значения используют для решения обратной задачи.
Рассчитываемое в точках измерения значение МЭД является суперпозицией МЭД от излучений всех элементов дискретизации всех моделируемых в помещении J фантомов с учетом поглощения и рассеивания излучения барьерами на траекториях от ИИИ до точек измерения МЭД:

Методами пространственно-геометрических преобразований с решением систем уравнений тел и поверхностей находятся траектории для каждой пары ИИИ - точка измерения МЭД и оптические длины для каждого из барьеров между ИИИ и точками измерения МЭД.
Поскольку в результате оптимизации дискретизации число элементарных объемов на один фантом может достигать миллионов, число расчетных сочетаний всех точек измерения и всех элементарных объемов всех фантомов в качестве источников и барьеров в помещении при числе фантомов в помещении, измеряемом сотнями, становится практически непригодным для расчета из-за высоких требований к вычислительной мощности. Для получения решения посредством существующих вычислительных технологий применяют справочную систему, реализованную в виде тензора третьего ранга с координатами «имя точки измерения»- «имя фантома»- «имя фантома-барьера». Тензор получается специальным расчетом траекторий при заданном низком уровне дискретизации каждого фантома на этапе начального уровня процессе оптимизации дискретизации. Например, низкому уровню дискретизации отвечает коэффициент дискретизации, соответствующий разбиению по каждой из координат на пять частей.
Это, в свою очередь, позволяет найти результирующие для траекторий значения коэффициентов линейного ослабления и дозовые факторы накопления для уравнения МЭД в точке от любого фантома-источника:

где  - значение амбиентного эквивалента дозы для таблицы
- значение амбиентного эквивалента дозы для таблицы  от фантома-источника j в точке пространства r,
от фантома-источника j в точке пространства r,
– одна из таблиц коэффициента пересчета флюенса гамма-квантов с энергией  в амбиентный эквивалент (внешнее облучение, хрусталик глаза или кожа),
в амбиентный эквивалент (внешнее облучение, хрусталик глаза или кожа),
 - интенсивность поверхностного (s) или объемного (v) радиоактивного загрязнения в зависимости от того, полнотелым или пустотелым является ИИИ,
- интенсивность поверхностного (s) или объемного (v) радиоактивного загрязнения в зависимости от того, полнотелым или пустотелым является ИИИ,
m – номер ИИИ (от 1 до M),
 - парциальные доли гамма-квантов с энергией в спектре загрязняющего объем или площадь принятого за точку m радиоактивного изотопа,
- парциальные доли гамма-квантов с энергией в спектре загрязняющего объем или площадь принятого за точку m радиоактивного изотопа,
 – объем или площадь ИИИ в зависимости полнотелый или пустотелый ИИИ,
– объем или площадь ИИИ в зависимости полнотелый или пустотелый ИИИ,
 - квадрат расстояния от центра ИИИ до точки измерения МЭД,
- квадрат расстояния от центра ИИИ до точки измерения МЭД,
 – эквивалентное значение дозового фактора накопления барьеров для траектории ИИИ-точка измерения,
– эквивалентное значение дозового фактора накопления барьеров для траектории ИИИ-точка измерения, 
 – эквивалентная оптическая толщина барьеров для траектории ИИИ-точка измерения,
– эквивалентная оптическая толщина барьеров для траектории ИИИ-точка измерения,
 – линейный коэффициенты ослабления гамма-квантов с энергией в k-ой среде,
– линейный коэффициенты ослабления гамма-квантов с энергией в k-ой среде,  - для каждого материала или фантома в целом если он получен гомогенизацией физических объектов,
- для каждого материала или фантома в целом если он получен гомогенизацией физических объектов,
 – геометрическая толщина барьера среды k на траектории к точке измерения r от ИИИ m фантома j,
– геометрическая толщина барьера среды k на траектории к точке измерения r от ИИИ m фантома j,
k – номер барьера на траектории (от 1 до K), 
В силу принятого допущения об одинаковости уровня загрязнения по одному фантому, в уравнении (2) уровень поверхностного или объемного загрязнения для фантома можно вынести за скобки и считать единственной для фантома неизвестной величиной в системе уравнений. Внутри скобок останутся не зависящие от уровня радиоактивного загрязнения геометрические параметры и физические характеристики элементов, на которые делился фантом при его дискретизации. Часть этих параметров зависит от размеров и свойств материалов самого фантома, а часть - от свойств и геометрии материалов-барьеров по траектории до точки измерения. Содержимое скобок будет представлять коэффициент при уровне загрязненности конкретного фантома для уравнения конкретной точки измерения.

Здесь K1,2…М – набор коэффициентов, получаемых для каждого из М фантомов. Естественно, что в уравнениях для разных точек измерения r наборы коэффициентов K1,2…М будут различаться.
Линейная система уравнений (3) для набора точек измерения r может быть решена относительно неизвестных 
Очевидно, что для решения линейной системы уравнений количество переменных должно быть не меньше количества точек измерения, а для получения единственного решения количество переменных и количество точек измерений должно совпадать. То есть, очевидным представляется вывод о том, что количество точек измерения, совпадающее с количеством фантомов, достаточно для решения обратной задачи.
Однако на практике такому подходу препятствуют следующие обстоятельства.
Во-первых, фантомная модель исследуемого помещения, основанная на объемной САПР-модели, аппроксимирует характеристики реальных моделируемых объектов с определенной погрешностью. К таким характеристикам можно отнести координаты объекта, его объем, физические свойства материала объекта и т.п. С увеличением количества фантомов указанная погрешность нарастает.
Во-вторых, измерение МЭД производится с определенной погрешностью, которая обусловлена как приборной погрешностью самого датчика, так и методикой осуществления измерения, при этом погрешность измерения может нарастать с уменьшением длительности измерения.
В-третьих, координаты точек измерения МЭД также определяются с некоторой погрешностью, что существенно влияет на результаты измерений, поскольку МЭД, например, для точечного источника убывает как квадрат расстояния от источника.
Таким образом, при формировании системы уравнений возникает потребность учета указанных погрешностей.
На следующем этапе формируют уравнение для составления системы уравнений с учетом указанных выше погрешностей. При этом левую часть уравнений считают точной, а все источники погрешностей переносят в правую часть с неизвестными весами, тем самым предполагается, что правая часть задана с неизвестной погрешностью. Благодаря этому многомерная задача учета погрешностей для каждого уравнения сводится к одномерной:

здесь D – коэффициент ошибок.
Далее решают полученную систему уравнений.
Если количество уравнений, определяемое числом точек измерения МЭД, не достаточно для решения относительно числа неизвестных, систему уравнений дополняют уравнениями и неравенствами, отражающими физический смысл рассчитываемых величин. Например, уровень загрязнения каждого фантома не может быть отрицательным числом; уровни загрязнения некоторых фантомов, например, участков изогнутой трубы, одинаковы. Кроме того, из-за неопределенности в правой части уравнений в силу неизвестности коэффициента ошибок D и погрешности измерений МЭД система уравнений дополняется вариантами с другими значениями правой части, получаемыми в результате работы датчиков случайных чисел, моделирующих неопределенности правой части уравнения (4). Система уравнений случайных чисел становится переопределенной и никогда не имеющей точного решения. В целях получения приближенного решения данная система линейных уравнений решается одним из методов машинного обучения, например, методом линейной регрессии с кроссверификацией, то есть многократно по частям, одна из которых обучающая, другая контрольная. Метод кросс-верификации предполагает многократный случайный выбор уравнений для обучающей и контрольной частей. Результат многократного решения обрабатывается, статистически давая приближенный результат решения системы уравнений.
Часть так называемых токсичных для расчета точек, в которых произведено измерение МЭД, будет исключена из расчета обратной задачи. Примером точки, токсичной для решения обратной задачи, является точка, сильно удаленная от всех фантомов-источников. Уровень МЭД от источника ни на каком расстоянии от него не равен нулю, но быстро убывает с расстоянием. При включении точки измерения в систему уравнений могут возникать ситуации, когда измеренное значение МЭД от какого-либо фантома, находящегося далеко от точки измерения, чрезвычайно мало. Однако исключить из системы уравнений этот фантом из рассмотрения нельзя, поскольку в других уравнениях для других точек измерения вклад этого фантома может быть существенным. И в системе уравнений в предельном случае может остаться, например, уравнение только для одной точки, в котором присутствует фантом с существенным вкладом в МЭД, а в остальных уравнениях в столбце фантома будут коэффициенты, близкие к нулям. С учетом ограничений, накладываемых разрядностью мантисс используемых вычислительных средств, может возникнуть ситуация, когда при расчетах главного определителя матрицы системы уравнений разрядности мантиссы компьютера может не хватить, и главный определитель матрицы коэффициентов обнулится, матрица коэффициентов станет сингулярной, и решение получить окажется невозможным. При решении токсичные точки, находящиеся вдали от фантомов фантомной модели помещения, с которыми возможно возникновение сингулярности, должны быть исключены из расчета. Такие токсичные точки определяются пробными расчетами обратной задачи при диагностике сингулярности в решении.
Получив таким образом не противоречащие физическому смыслу решения для уровней радиоактивного загрязнения фантомов, выполняют корректировку, определяя токсичные для последующего расчета точки: решают прямую задачу в точках измерений МЭД для фантомов с найденным в обратной задаче уровнем радиоактивного загрязнения фантомов. Прямая задача – нахождение правых частей уравнений (4) при известных данных левой части. После этого для каждой из точек сравнивают измеренные и посчитанные значения. Точки, в которых фиксируется максимальное расхождение между рассчитанным уровнем дозы и измеренным, являются токсичными для расчета Токсичность определяется, например, серьезными ошибками в зафиксированных координатах произведенных измерений МЭД в помещении или погрешностями фантомной модели помещения, например, отсутствием в фантомной модели важных фантомов-барьеров на траектории от источников излучения до точки или отсутствием в фантомной модели важных фантомов-источников для точки измерения. Токсичные точки могут быть исключены из дальнейшего расчета для повышения его точности если нет возможности откорректировать их положение или фантомную модель.
Таким образом, после исключения при решении обратной и прямых задач токсичных точек из числа имеющихся точек измерения МЭД вероятной является ситуация, когда оставшееся число этих точек может оказаться недостаточным для последующего корректного решения системы уравнений обратной и прямой задачи в целях определения пространственных полей МЭД по объему помещения. В этом случае выполняют дополнительное проведение измерений МЭД в заданных точках с целью сохранения условия решаемости системы уравнений.
По результатам решения обратной задачи и с учетом значений радионуклидного вектора делают предположение о том, какие объекты исследуемого помещения могут являться источниками α- или β- излучения.
Далее, на следующем этапе, проводят обследование поверхностей элементов, представляющих собой источники α- или β- излучения. Полученными данными дополняют ЦИИРМ.
В результате проведения этапов заявленного способа получают цифровую исполнительную инженерно-радиационную модель исследуемого помещения.
На завершающем этапе на основании ЦИИРМ получают отчет о КИРО, содержащий результирующие показатели, например, объемы образующихся первичных отходов, загрязненные радионуклидами или промышленных отходов.
Заявленный способ осуществляется при помощи системы формирования цифровой исполнительной инженерно-радиационной модели объектов использования атомной энергии, остановленных для вывода из эксплуатации.
Указанная система (фиг.2) включает подсистему (1) сбора данных СД, подсистему (2) построения цифровой исполнительной инженерной модели ЦИИМ, подсистему (3) построения цифровой исполнительной инженерной радиационной модели ЦИИРМ.
На фиг. 3 показаны основные компоненты подсистемы (1) сбора данных. Подсистема (1) сбора данных предназначена для сбора данных в привязке к локальным координатам ограниченного пространства произвольной геометрии с размещенными в нем объектами по способу, изложенному в патенте РФ 2683993. Под локальными координатами в данном случае понимаются координаты, отсчитываемые от произвольно выбранной или заданной точки обследуемого пространства, идентифицируемой соответствующей базовой меткой – БМ. Локальные координаты не привязаны к каким-либо иным объектам, принадлежащим обследуемому пространству, за исключением указанной базовой метки. Локальные координаты не привязаны к объектам вне обследуемого пространства, равно как и не привязанные к абсолютным координатам, определяемым, например, с использованием системы глобального позиционирования.
Подсистема (1) сбора данных представляет собой мобильный и легко транспортируемый аппаратно-программный комплекс, включающий множество автономных движущихся устройств (1.1) АДУ и управляющую станцию (1.2) УС, в состав которой входит по меньшей мере одна БМ (1.2.1).
Под АДУ понимаются самоходные тележки, роботы, беспилотные летательные аппараты, в частности, вертикального взлета и посадки (VTOL), и подобные им устройства, способные заданное время в автономном режиме, т.е. без вмешательства со стороны оператора, совершать перемещения на плоскости и/или в пространстве обследуемого помещения.
В преимущественном варианте осуществления изобретения в качестве АДУ используются беспилотные летательные аппараты вертикального взлета и посадки (VTOL), также именуемые дронами.
Каждое АДУ (1.1) включает, помимо присущих данному типу АДУ средств обеспечения перемещения (опорная рама; мотор; винты, или колеса, или гусеницы и т.п.), следующие компоненты: модуль жизнеобеспечения, модуль предотвращения столкновений, модуль определения локальных координат; модуль сбора данных. Опционально, АДУ могут оснащаться модулем индикации «старт/стоп движение», расположенными, например, на несущей раме, которые сигнализируют об успешном размещении данного АДУ на стартовых пластинах модуля запуска.
Модуль жизнеобеспечения АДУ включает контрольно-вычислительный блок (процессор); блок связи для осуществления связи и передачи данных между АДУ (1.1) и УС (1.2) через БМ (1.2.1) и с другими АДУ (1.1); блок хранения собранных АДУ данных; блок контроля энергообеспечения. Модуль жизнеобеспечения АДУ может включать и другие блоки, назначение и функционал которых хорошо известны специалисту в области техники.
С целью предотвращения столкновений с подвижными или неподвижными объектами, а также между собой, АДУ (1.1) снабжается модулем предотвращения столкновений, который может функционировать по принципу ультразвукового сонара, или системы машинного стереоскопического зрения, или на основе другого принципа, позволяющего оперативно вычислять наличие преград на пути движения АДУ (статических, таких как компоненты оборудования, трубопроводы или другие элементы исследуемого ограниченного пространства; динамических, таких как другие АДУ (1.1), исследующие пространство).
Сбор данных осуществляется посредством установленного на АДУ (1.1) модуля сбора данных, который может включать одно или несколько средств измерения параметров объекта или среды, и/или средства фото- и/или видеофиксации. В зависимости от оснащенности модуля сбора данных возможно получить данные о по меньшей мере одном параметре из группы, включающей: температуру окружающей среды в точке замера; температуры сканируемой поверхности; атмосферное давление в точке замера; вибрационные характеристики исследуемой поверхности; влажность в точке замера; компонентный состав окружающей среды; электромагнитные характеристики исследуемой поверхности; характеристики альфа-, бета- гамма-излучений в точке замера; коэффициент светоотражения поверхности; шероховатость поверхности; фото-/или видеоизображение объекта внутри исследуемого пространства, сферическую панораму пространства, снятую из точки нахождения АДУ; данные лазерного сканирования, снятые (полученные) из точки нахождения АДУ; химический состав среды в точке измерения; а также другие параметры окружающей среды и объектов внутри исследуемого помещения ОИАЭ. В качестве средств измерения на АДУ могут использоваться как контактные, так и бесконтактные средства измерения, средства получения изображений в различных диапазонах длин волн, а также комбинации таких средств. Например, для измерения плотности излучения альфа-частиц в силу малой длины траектории пробега альфа-частиц в воздухе АДУ оснащают датчиком, который должен позиционироваться на уровне 1-2 мм от поверхности измерений, то есть, практически являться контактным датчиком.
Модуль определения локальных координат АДУ включает блок инерциального позиционирования и блок лазерной дальнометрии.
Блок инерциального позиционирования включает датчики инерциальной системы позиционирования, а также датчики измерения углов тангажа, крена и рыскания, измеряющие мгновенные углы поворота осей собственной системы координат АДУ в исследуемом пространстве.
Блок лазерной дальнометрии включает множество жестко закрепленных на поверхности конструкции АДУ датчиков облучения, фиксирующих облучение лазерным лучом заданных длин волн, соответствующих длине волны лазера базовой метки. Положение каждого из датчиков облучения относительно геометрического центра АДУ точно известно.
Кроме того, для АДУ, выполняющих функцию подвижной базовой метки (АДУ-ретрансляторы координат), блок лазерной дальнометрии включает лазерный сканер заданной длины волны, обеспечивающий сканирование и облучение пространства с целью обнаружения АДУ-исследователей и АДУ-обеспечителей, вышедших из зоны покрытия блока лазерной дальнометрии БМ (1.2.1). Сканер жестко координирован относительно геометрического центра АДУ.
В общем случае каждое АДУ может посредством беспроводной связи осуществлять взаимосвязь с УС и/или другими АДУ для обмена данными. В особых случаях, когда осуществление беспроводной связи по тем или иным причинам исключается или невозможно, АДУ выполняет задание в автономном режиме. Сбор данных в этом случае осуществляется в блок хранения данных модуля жизнеобеспечения. По возвращению АДУ к своей стартовой пластине собранные данные передаются посредством блока приема данных стартовой пластины в модуль хранения данных управляющей станции (1.2) для последующего анализа и обработки вычислительным модулем управляющей станции. В случае принудительного прерывания задания, например, в случае разряда батареи, АДУ возвращаются для подзарядки на пусковую площадку, а после осуществления полного заряда своей аккумуляторной батареи возвращаются в точку принудительного прерывания задания для продолжения его выполнения. Опционально, продолжить выполнение задания может другое АДУ, которое либо завершило свое задание, либо находится на пусковой площадке и имеет достаточный заряд аккумуляторных батарей.
Необходимым условием получения точной ЦИИРМ является минимальная погрешность в определении координат нахождения АДУ в момент осуществления сбора данных. В противном случае искажается реальная картина распределения свойств пространства в исследуемом объеме. Для обеспечения указанного условия вводится уставка погрешности накопления локальных координат в отсутствие облучения АДУ со стороны БМ (1.2.1) или АДУ-ретранслятора координат. При превышении уставки сбор данных прекращается, и АДУ переходит в режим ожидания облучения на заданный период времени, по окончании которого направляется к модулю запуска АДУ. Период ожидания облучения может определяться, в частности, особенностями полетного задания, типом данных, собираемых указанным АДУ, уровнем оставшегося заряда в аккумуляторах АДУ и т.п.
Подсистема сбора данных (1) в общем случае включает модуль запуска-останова (1.3) МЗС, выполненный в виде стартово-посадочных пластин с размещаемыми на них (1.1) АДУ, по меньшей мере одну базовую метку (1.2.1), модуль определения локальных координат, модуль хранения данных, модуль ввода данных, модуль энергоснабжения, модуль беспроводной связи, вычислительный модуль, модуль визуализации данных, модуль сигнализации, модуль контроля ионизирующего излучения.
Модуль запуска-останова (1.3) сформирован из стартовых пластин, которые предназначены для первоначального размещения АДУ; учета АДУ, выбранных для задания, их старта и посадки, подзарядки, приема данных от АДУ в случае, если передача данных от АДУ в процессе выполнения задания по беспроводной связи невозможна. Может быть реализован в виде кофра с посадочными гнездами для АДУ, или любым иным образом.
Модуль определения локальных координат в составе УС выполнен с возможностью обеспечения определения локальных координат АДУ (1.1) и включает по меньшей мере одну базовую метку (1.2.1) (БМ), обеспечивающую точку отсчета локальных координат. Каждая базовая метка включает модуль лазерной дальнометрии и модуль беспроводной связи. По существу, модуль лазерной дальнометрии выполняют в виде лазерного сканера требуемой точности и дальности действия, позволяющего проводить высокоточные измерения расстояний на дальностях, соответствующих геометрическим размерам исследуемого ограниченного пространства произвольной формы. Модуль беспроводной связи выполнен с возможностью осуществления многоканальной беспроводной связи с каждым из АДУ (1.1) для обеспечения двустороннего обмена информацией в реальном времени.
Устройство хранения данных сохраняет данные, собранные в ходе выполнения обследования каждым из АДУ и/или данных, полученных блоком приема данных каждой стартовой пластины, входящей в состав пусковой площадки. Устройство хранения данных по существу представляет собой известные устройства-накопители типа Flash-память, SSD, HDD и т.п. Опционально, устройство хранения данных обеспечивает возможность использования облачного сервиса хранения данных.
Терминал ввода данных управляющей станции обеспечивает возможность ввода командных данных в систему сбора данных, в частности, в УС. Опционально, управляющая станция может не оснащаться собственным физическим терминалом ввода данных, а для управления ею может использоваться любой удаленный терминал, например, планшет, ноутбук, компьютер, смартфон и т.п., снабженный специализированным приложением, или программой, для управления системой сбора данных. Терминал ввода данных может быть реализован как клавиатура, сенсорный экран, устройство голосового ввода или любым другим известным образом.
Модуль энергоснабжения УС контролирует и регулирует электроснабжение непосредственно УС и пусковой площадки, сформированной из стартовых пластин, и опосредованно отвечает за энергоснабжение всех АДУ, исследующих помещение. Энергоснабжение УС и пусковой площадки может осуществляться от любого подходящего источника энергии, например, от электрической сети, и/или от комплекта аккумуляторных батарей, и/или от солнечных батарей, и/или от генератора электричества, работающего на углеводордном топливе, и т.п.
Модуль беспроводной связи УС обеспечивает возможность беспроводной передачи данных между всеми компонентами подсистемы сбора данных по известным технологиям беспроводной передачи данных, например, Wi-Fi, Bluetooth и др., а также с другими подсистемами заявленной системы, оснащенными соответствующими модулями беспроводной связи, в том числе с БМ (1.2.1).
Модуль контроля ионизирующего излучения УС включает по меньшей мере один датчик контроля ионизирующего излучения и осуществляет контроль за уровнем ионизирующего излучения в зоне нахождения БМ (1.2.1) с целью предупреждения выхода их из строя.
Вычислительный модуль УС на основе данных, полученных устройством хранения данных УС формирует единый пространственный массив данных – ЕПМД, выполняет построение распределения свойств исследуемого пространства в объеме; результаты направляются в устройство хранения данных подсистемы (2) построения ЦИИМ. Кроме того, вычислительный модуль отслеживает параметры компонентов УС, включая датчик ИИ, и в случае, если значения параметров выходят за пределы заранее установленных диапазонов, инициирует подачу предупреждающего сигнала оператору.
Единый пространственный массив данных содержит данные со всех АДУ-исследователей и включает данные лазерного сканирования по геометрии помещения, пространственно-привязанные данные сферического фотографирования.
Устройство отображения данных управляющей станции предназначено для визуализации полученных при обследовании помещения набора данных в виде пространственного облака точек, при этом каждая точка представляет собой значение параметра объекта и/или среды исследуемого помещения ОИАЭ в привязке к локальным координатам точки измерения, рассчитанным в процессе сбора данных в соответствии с реализуемым способом определения локальных координат. По существу, устройство визуализации данных представляет собой жидкокристаллический дисплей заданного разрешения. Опционально, управляющая станция может не оснащаться собственным физическим дисплеем, а для визуализации полученных и обработанных вычислительным блоком УС данных может использоваться экран удаленного устройства визуализации, например, планшета, ноутбука, стационарного компьютера, смартфона, системы виртуальной реальности, системы дополненной реальности и т.п., снабженных специализированным приложением, или программой, для визуализации данных.
Кроме того, управляющая станция может быть оснащена блоком подачи предупреждающего сигнала, например, акустического или светового, которое срабатывает в ситуациях, когда какие-либо параметры работы подсистемы выходят за заранее установленные диапазоны их значений. К таким ситуациям относятся, например, резкое повышение температуры в месте нахождения УС, потеря связи базовой метки с количеством АДУ, превышающем заданное, превышение мощности экспозиционной дозы в месте нахождения УС или БС заранее заданного значения и др.
Для решения поставленной задачи подсистема сбора данных использует АДУ двух типов: АДУ-исследователи и АДУ-обеспечители.
АДУ-исследователи осуществляют сбор данных, как указано ранее, и различаются оснащением модуля сбора данных:
Альфа-АДУ – предназначены для проведения измерений плотности потока излучения альфа-частиц с поверхности перекрытия помещений и поверхностей оборудования, трубопроводов; оснащаются детектором плотности потока частиц альфа-излучения.
Бета-АДУ – предназначены для проведения измерений плотности потока излучения бета-частиц с поверхности перекрытия помещений и поверхностей оборудования, трубопроводов; оснащаются детектором плотности потока частиц бета-излучения.
Гамма-АДУ – предназначены для проведения измерений величин мощности экспозиционной дозы в пространстве помещения; оснащаются детектором гамма-излучения.
С целью определения изотопного состава РАО необходимым условием является получение спектра гамма-излучения. В настоящее время спектрометры представляют собой довольно массивное оборудование. Поэтому для исследования спектра гамма-излучения рационально использовать АДУ подходящего типа соответствующей грузоподъемности, например, самоходные тележки. Альтернативно, компоненты радионуклидного вектора могут быть определены или рассчитаны заранее до исследования, для всего объекта или индивидуально для каждого из помещений (группы помещений), и задаются в качестве исходных данных.
АДУ-сканер – оснащен головкой трехмерного лазерного сканирования для обеспечения трехмерной исполнительной геометрической съемки помещений.
АДУ-фотограф – оснащен фотоголовками для обычного и сферического фотографирования.
К АДУ-обеспечителям относятся:
АДУ-ретрансляторы беспроводной связи – используются для восстановления устойчивого канала беспроводной станции между одним или двумя АДУ и управляющей станцией посредством создания цепочки ретрансляции.
АДУ- мобильная метка дифференциальной коррекции АДУ-ретранслятор координат) – применяется для пространственно-высокоточного определения локальных координат АДУ-исследователей и АДУ-обеспечителей. Может использоваться одно или более.
Применяются АДУ-ретрансляторы координат следующим образом. В общем случае УС, обладая информацией о расположении модуля запуска и высоте парения каждого из АДУ, последовательно облучает лазерным лучом модуля лазерной дальнометрии БМ (1.2.1) телесные углы, в пределах которых предположительно должны находиться применяемые в исследовательской миссии АДУ. Модуль лазерной дальнометрии БМ (1.2.1) облучает пространство последовательно до получения от АДУ подтверждения облучения и определения, таким образом, АДУ своей начальной координаты в системе координат БМ (1.2.1). В процессе своего движения АДУ может выйти из зоны прямой доступности луча лазерного сканера модуля лазерной дальнометрии БМ (1.2.1). Для каждого АДУ управляющая станция постоянно определяет вероятность такого события, анализируя данные лазерного сканирования АДУ и топологию одновременно создаваемой цифровой исполнительной инженерной модели для определения расположения в ней АДУ и своевременного направления АДУ-ретранслятора для исключения прерывания канала передачи дифференциальных поправок координат и планируя траекторию его перемещения в исследуемом пространстве. При наступлении указанного события УС направляет АДУ-ретранслятор координат для уточнения координат дезориентированного АДУ, то есть, АДУ, находящегося вне зоны прямой видимости БМ (1.2.1). При этом АДУ-ретранслятор координат находится, с одной стороны, в зоне прямой видимости модуля лазерной дальнометрии БМ (1.2.1), а с другой стороны – в зоне прямой видимости датчиков облучения модуля определения локальных координат дезориентированного АДУ. Таким образом, АДУ-ретранслятор координат по существу выполняет функцию временной базовой метки для дезориентированного АДУ, что позволяет уточнить координаты дезориентированного АДУ.
Подсистема (2) построения цифровой исполнительной инженерной модели ЦИИМ (фиг.4) включает модуль (2.1) хранения данных, модуль (2.2) ввода-вывода данных, вычислительный модуль (2.3), опционально - модуль жизнеобеспечения (2.4).
Модуль (2.1) хранения данных представляет собой устройство хранения для хранения библиотеки цифровых схем объекта исследования (ЦСОИ), библиотеки САПР-элементов, а также данных ЕПМД, полученных от подсистемы (1) сбора данных, и данных, полученных как результат работы вычислительного модуля (2.3).
Модуль (2.2) ввода-вывода данных может быть реализован в виде любого устройства, позволяющего осуществлять ввод данных в подсистему и визуализацию данных, например, в виде планшета, стационарного компьютера, смартфона и т.п.
Вычислительный модуль (2.3), или процессор, осуществляет обработку ЕПМД, полученного в результате работы подсистемы (1) сбора данных, и, сопоставляя указанные данные и ОСЦМ, формирует цифровую исполнительную инженерную модель исследованного помещения ОИАЭ. Для этого вычислительный модуль (2.2) анализирует полученную при обследовании помещения подсистемой (1) совокупность геометрических и физических характеристик помещения, сферические фотопанорамы и ОСЦМ, сопоставляя и распознавая фото и ОСЦМ по кодам или иным критериям, и подбирает и размещает на модели по облакам точек соответствующие элементы из каталогов САПР. В случае невозможности сопоставить набор данных какому-либо объекту из ОСЦМ и/или САПР-модели из имеющихся библиотек, вычислительный модуль (2.2) подбирает наиболее подходящую по геометрическим характеристикам модель из серии геометрических примитивов, в качестве атрибутов присваивает этому примитиву набор собранных в этом участке пространства данных и оповещает оператора об этом, например, инициируя блок подачи предупреждающего сигнала.
В ответ на уведомление оператор подсистемы может вручную назначить выделенному набору данных ЕПМД атрибуты, характеризующие элемент.
Такая ситуация может возникнуть по целому ряду причин. Например, могла быть увеличена скважность сбора данных в определенном участке пространства исследуемого помещения ОИАЭ; произошел сбой определения локальных координат; произошел сбой работы датчика сбора данных; данные, включая координаты, были собраны корректно, однако сам объект является поврежденным оборудованием (участок разрыва трубы с рваными краями и т.п.) Оператор на основе анализа ситуации по своему усмотрению может либо подобрать иную модель из каталога САПР-моделей, либо присвоить подобранному подсистемой (2) геометрическому примитиву атрибуты в соответствии с имеющейся ОСЦМ.
Кроме того, оператор может получить уведомление о сбое в работе и в случае, если расхождение между какой-либо частью пространственно – увязанного набора измеренных данных и имеющимися библиотеками превышает заранее заданную величину, то есть, когда есть сомнения в правильности распознавания элемента. Оператор может вручную скорректировать результаты распознавания.
Модуль (2.4) жизнеобеспечения подсистемы (2) ЦИИМ включает контрольно-вычислительный блок (процессор); блок связи для осуществления связи и передачи данных между всеми подсистемами заявленной системы; опционально - блок контроля энергообеспечения. Также, аналогично подсистеме (1), модуль жизнеобеспечения подсистемы (2) включает блок подачи предупреждающего сигнала (акустического, светового), который срабатывает при достижении параметрами подсистемы (2) заранее установленных критериев (обобщенно такие ситуации можно назвать сбоем в работе). Альтернативно, устройство подачи предупреждающего сигнала может быть реализовано в виде машиночитаемого носителя данных, хранящего инструкции, в соответствии с которыми при наступлении аварийной ситуации осуществляется подачу специального изображения на смартфон оператора системы. Модуль (2.4) жизнеобеспечения подсистемы (2) может включать и другие блоки, назначение и функционал которых хорошо известны специалисту в области техники.
Подсистема (3) построения цифровой исполнительной инженерно-радиационной модели ЦИИРМ (фиг.5) включает модуль (3.1) хранения данных, модуль (3.2) ввода-вывода данных, вычислительный модуль (3.3), модуль жизнеобеспечения (3.4) и осуществляет построение фантомной модели исследуемого помещения, вычисляет набор оптимальных точек (их координат в локальной системе координат исследуемого помещения, установленной в процессе сбора данных в соответствии с выбранным способом определения локальных координат) для измерения параметров ионизирующего излучения, направляет указанный набор подсистеме (1) с целью получения данных о распределении ионизирующего излучения в пространстве исследуемого помещения, решает обратную задачу нахождения удельной активности источников ионизирующего излучения по данным о мощности экспозиционной дозы, измеренным в соответствии с определенным подсистемой набором оптимальных точек, проверяет полученное решение обратной задачи и сохраняет удостоверенное решение обратной задачи в модуле хранения данных.
Модуль (3.1) хранения данных представляет собой устройство хранения для хранения данных ЦИИМ, полученных от подсистемы (2) построения ЦИИМ, а также для хранения библиотеки геометрических примитивов, используемых при моделировании помещения фантомами, а также для хранения всех результатов, полученных в процессе расчета оптимальных точек измерения, решения обратной задачи и т.п. Модуль может быть реализован в виде любого известного устройства постоянного хранения данных, а также в виде облачного сервиса хранения данных.
Модуль (3.2) ввода-вывода данных может быть реализован в виде любого устройства, позволяющего осуществлять ввод данных в подсистему и визуализацию данных, например, в виде планшета, стационарного компьютера, смартфона и т.п.
Вычислительный модуль (3.3) представляет собой процессор, который осуществляет построение фантомной модели исследуемого помещения, вычисление набора оптимальных точек для измерения параметров ионизирующего излучения, а также направляет указанный рассчитанный набор оптимальных точек измерения подсистеме (1) с целью получения данных о распределении ионизирующего излучения в пространстве исследуемого помещения. Подсистема (1), получив координаты точек для измерения МЭД, направляет гамма-АДУ для выполнения полетного задания. Значения МЭД, полученные гамма-АДУ, передаются от подсистемы (1) к подсистеме (3).
После получения данных о распределении МЭД в пространстве исследуемого помещения от подсистемы (1) вычислительный модуль решает, в соответствии с этапами заявленного в настоящем изобретении способа, обратную задачу нахождения удельной активности источников ионизирующего излучения по данным о мощности экспозиционной дозы, измеренным в соответствии с определенным подсистемой набором оптимальных точек, проверяет полученное решение обратной задачи и сохраняет удостоверенное решение обратной задачи в модуле хранения данных.
В случае, если подсистемой (3) определено, что ряд точек измерения МЭД оказываются токсичными, проводится проверка достаточности количества точек для решения обратной задачи. В случае, когда точек недостаточно, подсистема (3) формирует дополнительный набор точек, координаты их направляются подсистеме (1) для дополнительного сбора данных о МЭД посредством гамма-АДУ.
По результатам решения обратной задачи и с учетом значений радионуклидного вектора оператор системы делает предположение о том, какие объекты исследуемого помещения могут являться источниками α- или β- излучения. Далее формируют задание на обследование для альфа-АДУ и бета-АДУ и направляют его подсистеме (1) сбора данных для осуществления полетного задания. Полученные подсистемой (1) результаты передаются подсистеме (3) для дополнения ЦИИРМ.
Модуль (3.4) жизнеобеспечения подсистемы (3) ЦИИРМ включает контрольно-вычислительный блок (процессор); блок связи для осуществления связи и передачи данных между всеми подсистемами заявленной системы; блок контроля энергообеспечения. Также, аналогично подсистемам (1) и (2), модуль (3.4) жизнеобеспечения подсистемы (3) включает блок подачи предупреждающего сигнала, который срабатывает при сбое работы подсистемы.
В общем случае в состав системы может входить оборудование, достаточное для формирования более чем одного набора для реализации подсистемы (1) сбора данных. Это может оказаться целесообразным для одновременного обследования нескольких помещений одного ОИАЭ. При этом каждая из подсистем (1) сбора данных выполнена с возможностью обмена данными с подсистемой (2) построения ЦИИМ и подсистемой (3) построения ЦИИРМ. В свою очередь, подсистемы (2) и (3) выполнены с возможностью реализации соответствующих этапов способа для каждого набора ЕПМД, полученного от каждой из подсистем (1) сбора данных, преимущественно в режиме одновременной обработки. Таким образом, заявленные способ и система позволяют одновременно построить цифровую исполнительную инженерно-радиационную модель для каждого из помещений ОИАЭ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ получения, обработки, отображения и интерпретации геопространственных данных для геодезического мониторинга деформационного состояния инженерного объекта | 2017 |
|
RU2668730C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ КООРДИНАТ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА | 2018 |
|
RU2683993C1 |
| СПОСОБ ПРЕДАВАРИЙНОГО, АВАРИЙНОГО И ПОСТАВАРИЙНОГО КОНТРОЛЯ ИСТОЧНИКОВ РАДИАЦИОННОЙ, ХИМИЧЕСКОЙ И ВЗРЫВОПОЖАРНОЙ ОПАСНОСТИ В ГЕРМЕТИЧНЫХ ОБИТАЕМЫХ ОБЪЕКТАХ, ПРЕИМУЩЕСТВЕННО ПОДВОДНЫХ ЛОДКАХ, И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2596063C1 |
| Инженерный симулятор процесса добычи и транспортировки продукции скважин | 2018 |
|
RU2703359C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОНТРОЛЬНОЙ ТОЧКИ ОБЪЕКТА С ПРИМЕНЕНИЕМ НАЗЕМНОГО ЛАЗЕРНОГО СКАНЕРА | 2013 |
|
RU2540939C2 |
| Система контроля жизненного цикла объекта и его инфраструктуры (варианты) | 2019 |
|
RU2755146C2 |
| АВТОМАТИЗИРОВАННАЯ КОМПЛЕКСНАЯ СИСТЕМА МОНИТОРИНГА УДАЛЕННЫХ ОБЪЕКТОВ И СПОСОБ МОНИТОРИНГА УДАЛЕННЫХ ОБЪЕКТОВ | 2023 |
|
RU2820412C1 |
| Способ геодезического мониторинга деформационного состояния земной поверхности в сейсмоопасных районах с применением технологии лазерного сканирования | 2018 |
|
RU2680978C1 |
| Способ мониторинга геопространственных изменений потенциально опасного объекта | 2024 |
|
RU2831502C1 |
| Система определения геометрических параметров трехмерных объектов | 2017 |
|
RU2650857C1 |

Группа изобретений относится к области атомной энергетики. Система сбора и обработки данных для построения цифровой исполнительной инженерно-радиационной модели (ЦИИРМ) остановленного для вывода из эксплуатации объекта использования атомной энергии содержит подсистему сбора данных (СД), выполненную с возможностью сбора геометрических и радиационных данных в привязке к локальным координатам ограниченного пространства произвольной геометрии с размещенными в нем объектами, включающую множество автономных движущихся устройств, оснащенных датчиками для сбора данных, управляющую станцию, включающую по меньшей мере одну базовую метку, модуль запуска-останова автономных движущихся устройств, подсистему построения цифровой исполнительной инженерной модели (ЦИИМ), подсистему построения ЦИИРМ. Технический результат – повышение точности оценки объемов образования радиоактивных отходов. 2 н. и 3 з.п. ф-лы, 5 ил.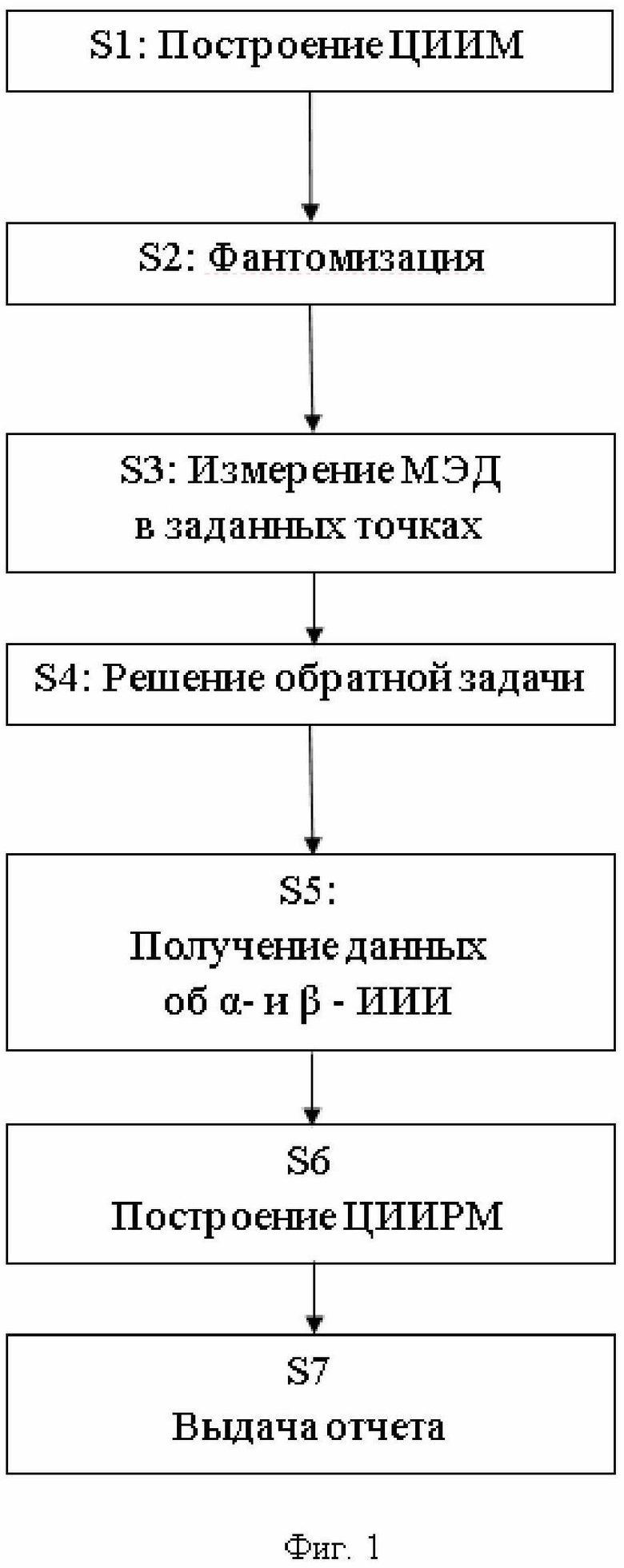
1. Система сбора и обработки данных для построения цифровой исполнительной инженерно-радиационной модели (ЦИИРМ) остановленного для вывода из эксплуатации объекта использования атомной энергии, содержащая:
подсистему (1) сбора данных (СД), выполненную с возможностью сбора геометрических и радиационных данных в привязке к локальным координатам ограниченного пространства произвольной геометрии с размещенными в нем объектами, включающую:
множество автономных движущихся устройств (1.1), оснащенных датчиками для сбора данных, причем по меньшей мере часть указанных автономных движущихся устройств (1.1) оснащена детекторами, выбранными из детектора альфа-излучения, детектора бета-излучения и детектора гамма-излучения,
управляющую станцию (1.2), включающую по меньшей мере одну базовую метку (1.2.1), и
модуль запуска-останова (1.3) автономных движущихся устройств;
подсистему (2) построения цифровой исполнительной инженерной модели (ЦИИМ), включающую модуль (2.1) ЦИИМ хранения данных, модуль (2.2) ЦИИМ ввода-вывода данных, вычислительный модуль (2.3) ЦИИМ; и
подсистему (3) построения ЦИИРМ, включающую модуль (3.1) ЦИИРМ хранения данных, модуль (3.2) ЦИИРМ ввода-вывода данных, вычислительный модуль (3.3) ЦИИРМ и модуль жизнеобеспечения (3.4) ЦИИРМ, включающий контрольно-вычислительный блок, блок связи, блок контроля энергообеспечения и блок подачи предупреждающего сигнала.
2. Способ сбора и обработки данных для построения цифровой исполнительной инженерно-радиационной модели остановленного для вывода из эксплуатации объекта использования атомной энергии (ОИАЭ) с использованием системы по п. 1, включающий следующие этапы:
(S1) выполняют лазерное сканирование и сферическое фотографирование по меньшей мере одного помещения ОИАЭ с получением объектов помещения, сопоставляют полученные объекты помещения с библиотекой САПР-моделей и цифровых схем объекта ОИАЭ для идентификации объектов помещения и формируют цифровую исполнительную инженерную модель (ЦИИМ) указанного по меньшей мере одного помещения ОИАЭ;
(S2) аппроксимируют каждый из объектов помещения ЦИИМ геометро-физическими примитивами, формируя фантомную модель помещения;
(S3) измеряют мощность эквивалентной дозы в заранее определенных точках каждого из по меньшей мере одного помещения ОИАЭ;
(S4) решают обратную задачу, определяя величину уровня радиоактивного загрязнения каждого из фантомов с учетом измеренной мощности эквивалентной дозы;
(S5) определяют элементы внутри каждого из по меньшей мере одного из помещений ОИАЭ, предположительно являющиеся источниками  - и/или
- и/или  -излучения, и проводят обследование поверхностей указанных элементов с целью выявления источников
-излучения, и проводят обследование поверхностей указанных элементов с целью выявления источников  - и/или
- и/или  -излучения; и
-излучения; и
(S6) получают цифровую исполнительную инженерно-радиационную модель исследуемого помещения.
3. Способ по п. 2, отличающийся тем, что на этапе S1 лазерное сканирование и сферическое фотографирование осуществляют дистанционно посредством автономных движущихся устройств.
4. Способ по п. 2 или 3, отличающийся тем, что на этапе S5 обследование поверхностей элементов с целью выявления источников  - и/или -излучения осуществляют дистанционно посредством автономных движущихся устройств.
- и/или -излучения осуществляют дистанционно посредством автономных движущихся устройств.
5. Способ по любому из пп. 2-4, отличающийся тем, что дополнительно включает этап S7 получения отчета, включающего объемы образующихся первичных отходов, загрязненных радионуклидами, и/ или промышленных отходов.
| Чуйко Д.В | |||
| "Применение имитационного моделирования для демонтажа реакторных установок первой очереди Белоярской АЭС" | |||
| Диссертация на соискание ученой степени кандидата технических наук | |||
| Москва, 2014 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Санкт-Петербург | |||
| - | |||
