Изобретение относится к области подвижной робототехники. Оно относится к устройству для предварительного позиционирования и для разъемного крепления шарнирных конечностей робота-гуманоида. Оно относится также к способу обслуживания, обеспечивающего простую и быструю замену неисправной шарнирной конечности запасной конечностью.
В области гуманоидной робототехники ставятся задачи объединения в одной машине наибольшего числа признаков человека. Прежде всего ставится задача приближения к человеку внешнего вида, морфологии или движений. Как правило, робот-гуманоид содержит несколько приводных шарниров, выполненных с возможностью приведения в движение одной конечности относительно другой при помощи электрического двигателя. Так, наиболее усовершенствованные роботы-гуманоиды содержат ноги, руки или кисти. Они могут шагать или танцевать наподобие человека. Они могут манипулировать при помощи рук предметами разной формы. Ставятся также задачи приближения к человеку по его поведению или интеллекту. Искусственный интеллект роботов все более совершенствуется, обеспечивая все более сложное взаимодействие с человеком-пользователем.
Роботы-гуманоиды находят самое разное применение. Так, предусмотрено их применение в промышленной области, например, для проникновения в зараженные зоны, представляющие собой риск для человека. Предусмотрены также варианты применения в области здравоохранения, например, для помощи лицам, страдающим каким-либо недостатком. Предусмотрено также более широкое использование в бытовых целях.
Задача масштабного применения, в том числе для широких слоев населения, порождает новые требования, например, промышленные, регламентные или связанные с обеспечением безопасности. Разработка самых современных поколений роботов включает в себя соблюдение набора условий, связанных с новыми регламентными требованиями. Например, робот, предназначенный для широких слоев населения, не должен быть связан ни с какими рисками для безопасности как при нормальной работе, так и в случае неисправности. Операции обслуживания должны быть доступны не только для опытного оператора, но и для простого пользователя. При проектировании робота следует также учитывать требования, связанные с послепродажным обслуживанием, например, для обеспечения легкой диагностики и простого и быстрого ремонта.
В связи с этим объектом изобретения является подвижный робот, содержащий туловище и несколько конечностей, разъемно соединенных с туловищем, отличающийся тем, что содержит:
- для каждой из конечностей средства для предварительного позиционирования упомянутой конечности на туловище, и
- единый наружный граничный элемент (крышка), соединенный с туловищем и выполненный с возможностью разъемного крепления всех конечностей на туловище.
Предпочтительно каждая из конечностей содержит приводной шарнир, при помощи которого упомянутую конечность позиционируют и крепят на туловище и приводят в движение относительно туловища.
Предпочтительно средства предварительного позиционирования, ассоциированные с одной из конечностей, содержат полость, сформированную в туловище, выполненную с возможностью вмещать приводной шарнир упомянутой конечности, и средства для защелкивания приводного шарнира в полости, так чтобы позиционировать и удерживать упомянутую конечность относительно туловища за счет действия усилием, превышающим усилие, создаваемое силой тяжести, между туловищем и упомянутой конечностью.
Предпочтительно средства защелкивания одной из конечностей содержат набор нервюр, сформированных в приводном шарнире и взаимодействующих с набором направляющих, сформированных в полости, ассоциированной с упомянутой конечностью.
Предпочтительно крышка выполнена подвижной относительно туловища с возможностью перемещения между открытым положением, позволяющим для каждой из конечностей позиционировать и убирать приводной шарнир относительно туловища, и закрытым положением, в котором крышка опирается на приводные шарниры всех конечностей; при этом робот содержит средства разъемного крепления для удержания крышки в закрытом положении.
Предпочтительно крышка соединена с туловищем при помощи поворотного соединения, выполненного с возможностью обеспечения перемещения крышки поворотом между открытым положением и закрытым положением таким образом, чтобы крышка удерживалась в открытом положении за счет силы тяжести.
Предпочтительно робот содержит для одной из конечностей первый и второй наборы мягких накладок, неподвижно соединенных соответственно с крышкой и полостью, ассоциированной с упомянутой конечностью, и выполненных с возможностью сжатия, обеспечивая удержание приводного шарнира, позиционированного и закрепленного на туловище.
Предпочтительно мягкие накладки выполнены из эластомерного пеноматериала.
Предпочтительно робот содержит для каждой из конечностей средства разъемного электронного соединения.
Предпочтительно шарнир одной из конечностей является приводным вокруг двух или трех осей вращения.
Предпочтительно робот содержит три конечности, при этом одна из конечностей, шарнирно установленная вокруг трех осей вращения относительно туловища, подобна голове, и две из конечностей, шарнирно установленных вокруг двух осей вращения относительно туловища и расположенных с двух сторон от туловища, подобны двум рукам.
Изобретение также относится к способу замены неисправной конечности робота, имеющего описанные выше признаки, исправной конечностью, отличающийся тем, что содержит этапы, на которых:
- убирают средства разъемного крепления,
- крышку перемещают в открытое положение,
- убирают неисправную конечность;
- исправную конечность предварительно позиционируют в полости (32), ассоциированной с неисправной конечностью,
- крышку перемещают в закрытое положение,
- устанавливают обратно средства крепления.
Предпочтительно способ дополнительно содержит этапы, на которых соответственно отсоединяют и подсоединяют средства электронного соединения между роботом и соответственно неисправной конечностью и исправной конечностью.
Изобретение будет более понятно, и его другие преимущества будут более очевидны из нижеследующего подробного описания варианта выполнения, представленного в качестве примера, со ссылками на следующие фигуры.
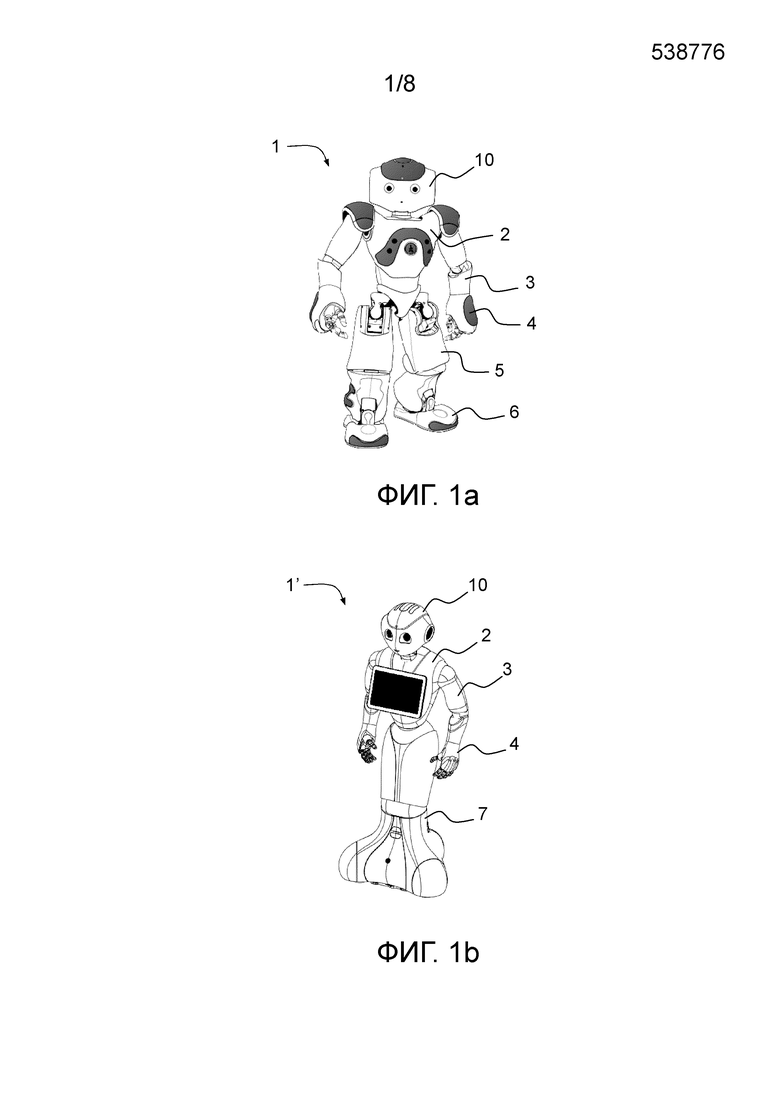
Фиг. 1а и 1b - два примера роботов-гуманоидов, которые можно оснастить устройством предварительного позиционирования и крепления, согласно изобретению.
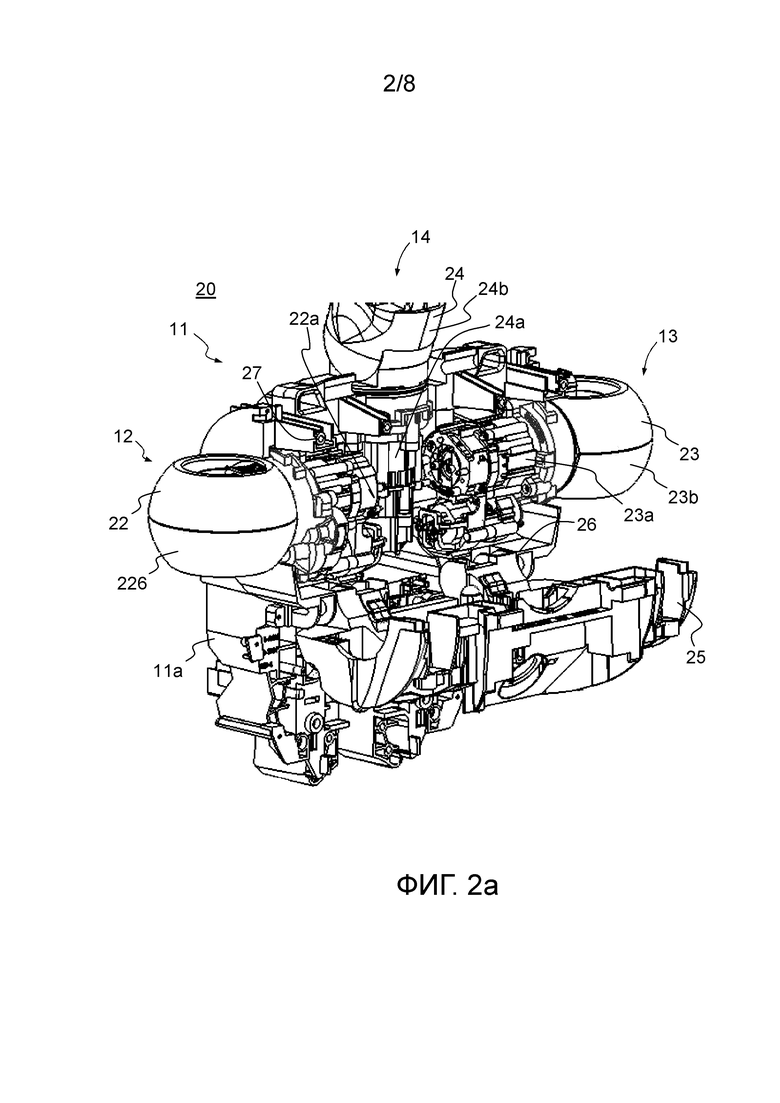
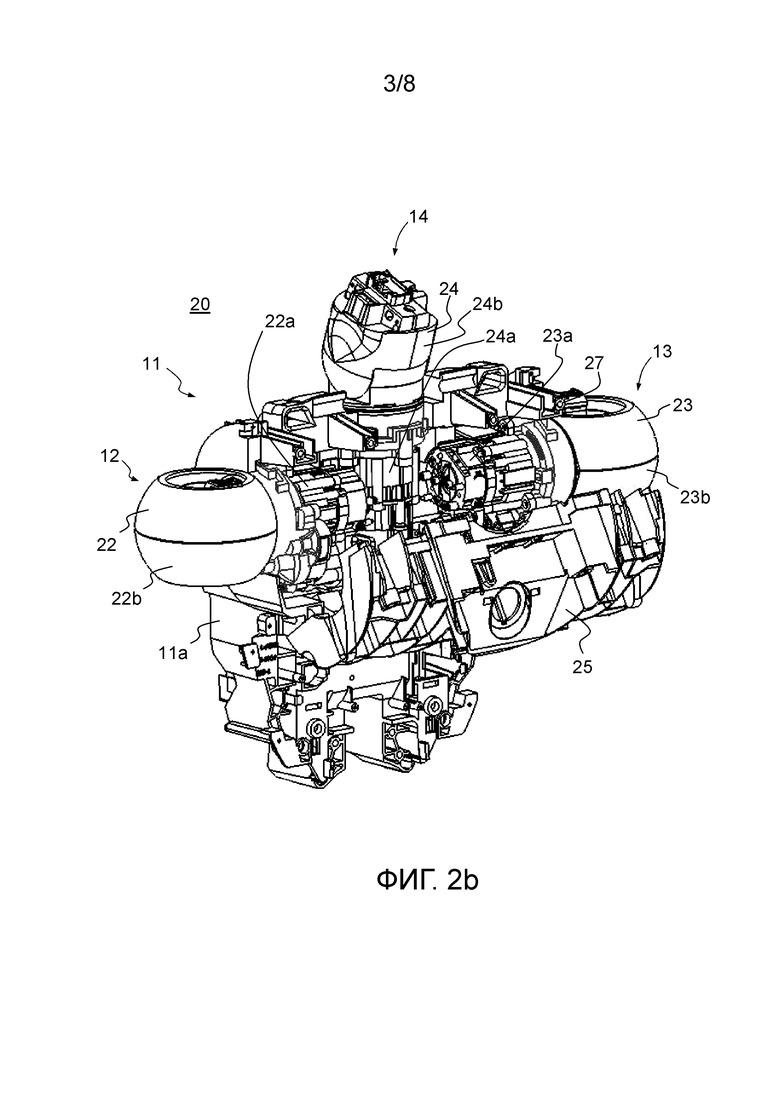
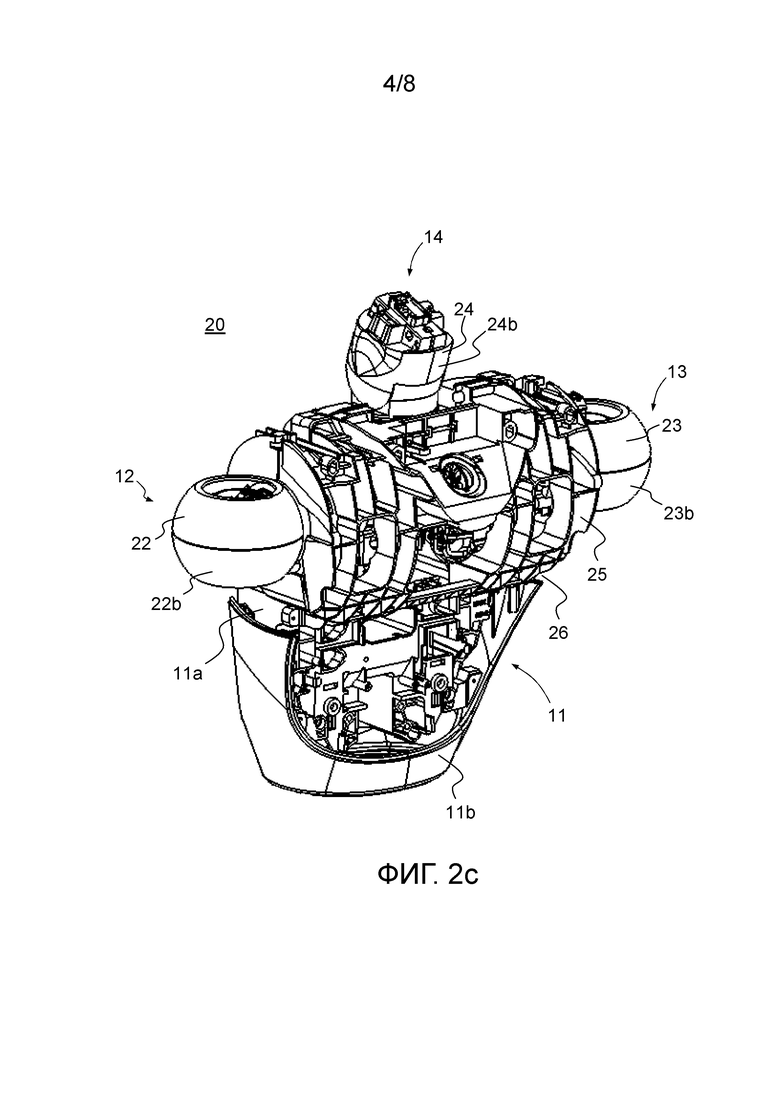
Фиг. 2а, 2b и 2с - пример заявленного робота, согласно изобретению, содержащего туловище и несколько шарнирных конечностей, закрепленных на туловище при помощи крышки, показанной в трех разных положениях.
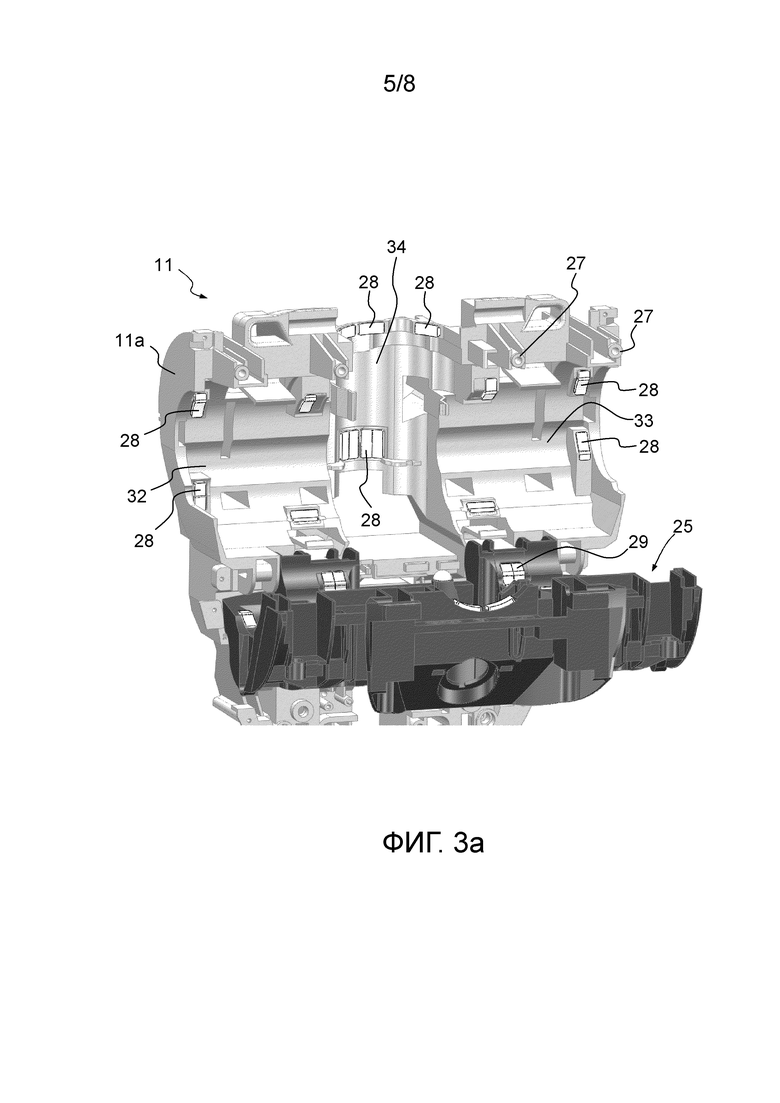
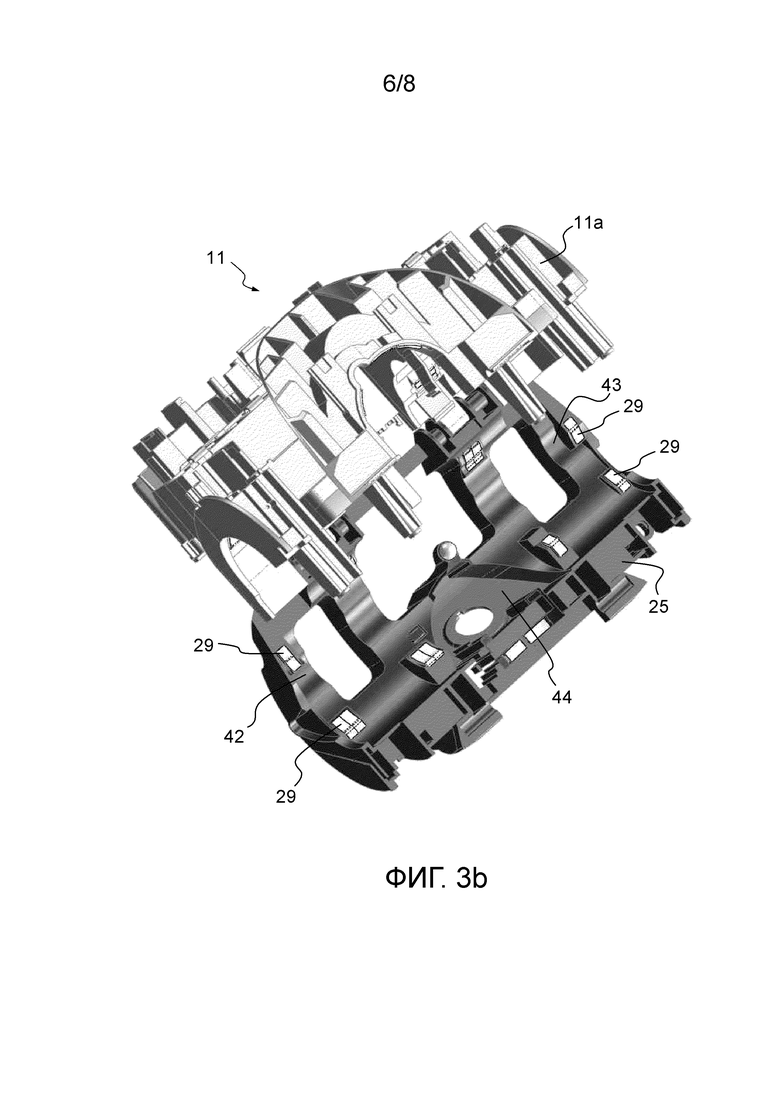
Фиг. 3а и 3b - два вида в перспективе туловища и крышки в открытом положении.
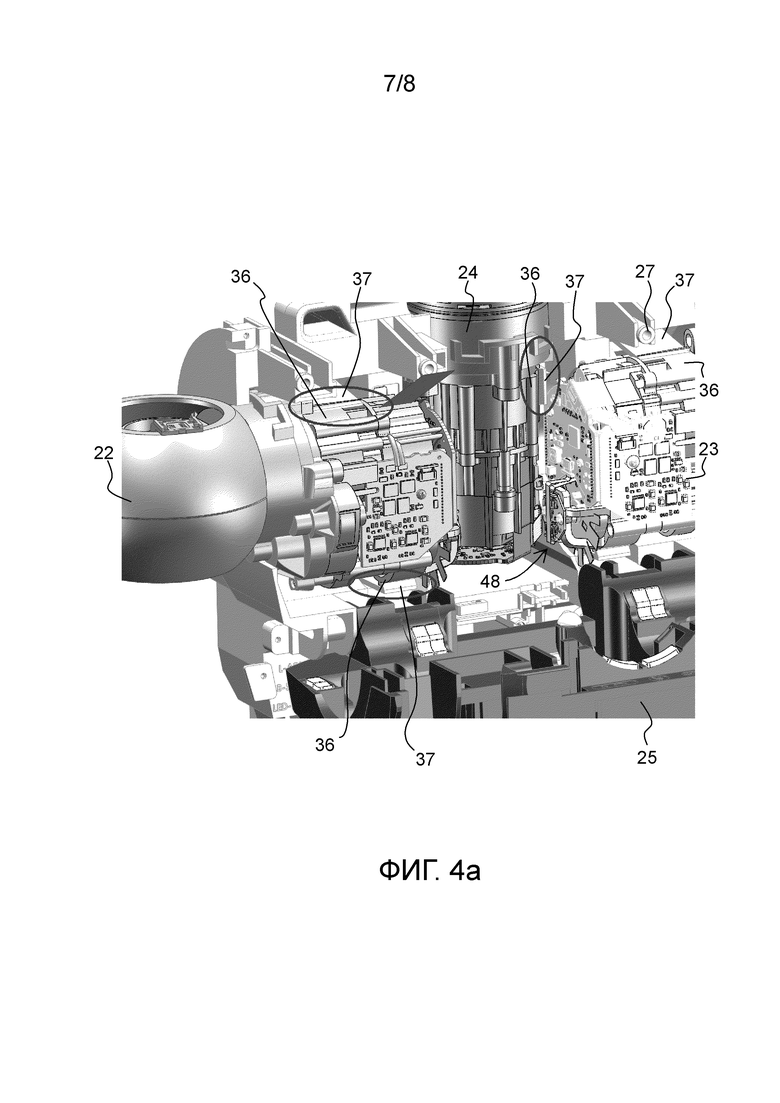
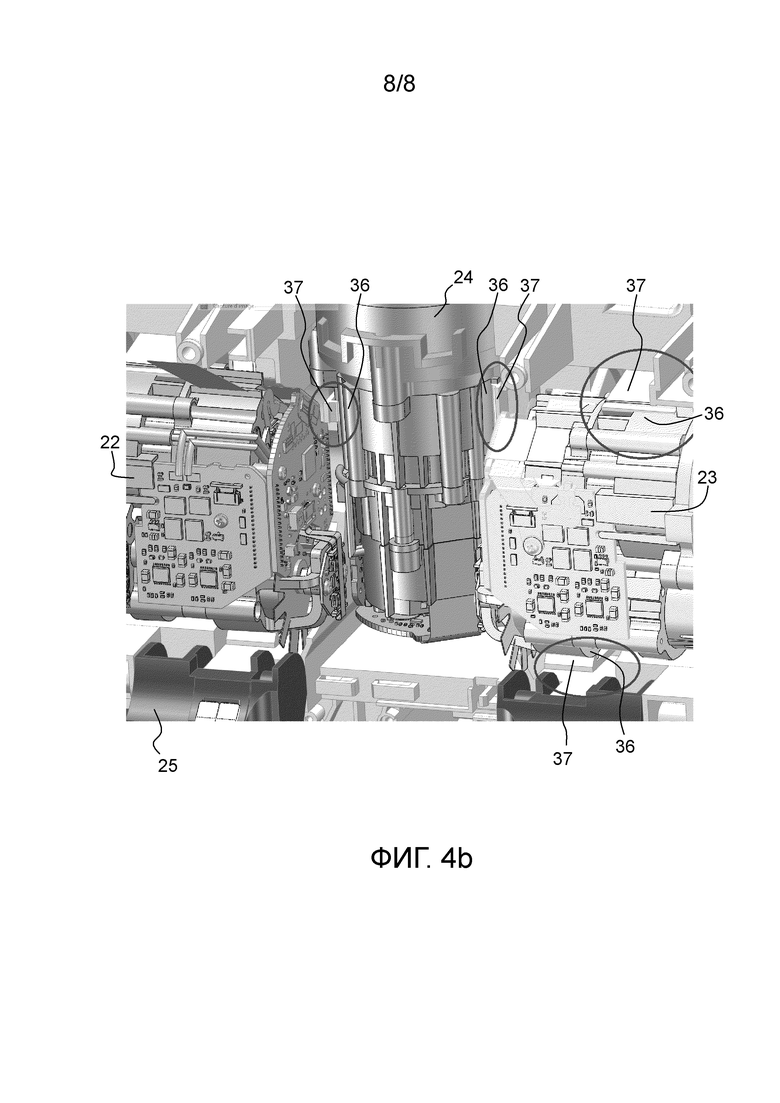
Фиг. 4а и 4b - средства предварительного позиционирования и крепления шарнирных конечностей на туловище робота.
Для большей ясности на разных фигурах одни и те же элементы имеют одинаковые обозначения.
На фиг. 1а и 1b показаны два примера роботов-гуманоидов, разработанных компанией ALDEBARAN ROBOTICSTM. Робот-гуманоид 1-, показанный на фиг. 1а, содержит голову 10, туловище 2, два плеча 3, две кисти 4, две ноги 5 и две ступни 6. Робот-гуманоид 1', показанный на фиг. 1b, содержит голову 10, туловище 2, два плеча 3, две кисти 4 и юбку 7. Эти два робота содержат несколько шарниров, обеспечивающих относительное движение различных элементов робота с целью воспроизведения морфологии человека и его движений. Роботы 1 и 1' содержат, например, шарнир 11 между туловищем 2 и каждым из плеч 3. Шарнир 11 является приводным вокруг двух осей вращения для обеспечения перемещения плеча 3 относительно туловища 2 наподобие возможных перемещений, посредством плечевым суставом человека.
Робот-гуманоид 1 содержит также несколько шарниров для приведения в движение ног робота и воспроизведения движения ходьбы, в частности, шарниры, подобные тазобедренному суставу между туловищем и бедром, коленному суставу между бедром и ногой, и лодыжке между ногой и ступней. Можно применять различные формы приводных шарниров, приводящих в движение одну из конечностей с одной или несколькими степенями свободы вращения.
Робот-гуманоид 1' имеет другую конструкцию. Чтобы улучшить устойчивость и опустить центр тяжести робота, робот имеет не ногу, а юбку 7, содержащую в своем основании треногу, выполненную с возможностью перемещения робота. Юбка содержит также первый шарнир, подобный коленному суставу, между ногой 7а и бедром 7b. Второй шарнир, подобный тазобедренному суставу, соединяет туловище 2 и бедро 7b. Эти два шарнира представляют собой поворотные соединения, являющиеся приводными вокруг оси вращения. Ось вращения Ха первого шарнира и ось вращения Хb второго шарнира по существу параллельны оси, соединяющей два плечевых сустава робота, что позволяет наклонять робот вперед или назад.
Общая идея настоящего изобретения состоит в разъемном соединении нескольких конечностей с туловищем робота при помощи устройства, позволяющего предварительно позиционировать каждый из элементов и закреплять конечности при помощи единой крышки. Открывание крышки позволяет быстро получить доступ к шарнирам конечностей. Устройство обеспечивает операцию легкой замены неисправной конечности.
Нижеследующее описание изобретения относится к роботу-гуманоиду, содержащему два плеча, шарнирно установленных вокруг двух осей вращения относительно туловища, и голову, шарнирно установленную вокруг трех осей вращения. Разумеется, изобретение не ограничивается этим частным примером. В целом, заявленное устройство можно применять для робота, содержащего несколько конечностей, шарнирно установленных относительно туловища. Робот может быть роботом-гуманоидом или роботом, подобным животному, объединенными общим названием подвижного робота. Изобретение можно также применять для промышленного робота. Шарнирные конечности, в общем, являются механическими узлами, которые должны перемещаться относительно друг друга или относительно туловища. Под «конечностью» следует понимать механический узел робота, подобный, например, ноге, бедру, туловищу, голове, плечу, кисти или их комбинации. Следует также отметить, что на фигурах детально представлен частный пример шарнира, приводного вокруг двух или трех степеней свободы, но, разумеется, изобретение в принципе можно применять для любого типа шарниров, например, для шарнира с одной, двумя или тремя степенями свободы во вращении или для шарнира с одной или несколькими степенями свободы в поступательном движении. Предпочтительно двигатель является электрическим двигателем. Не выходя за рамки изобретения, можно предусматривать другие двигатели, например, тепловой, гидравлический или пневматический двигатель. В данном примере устройство позволяет предварительно позиционировать и крепить три конечности, подобным двум плечам и голове. Устройство не включает в себя нижние конечности, такие как ноги или юбку. Этот выбор трех конечностей является частным случаем, и изобретение охватывает любой выбор нескольких конечностей робота.
На фиг. 2а, 2b и 2с представлен пример заявленного робота, содержащего туловище и несколько шарнирных конечностей, закрепленных на туловище при помощи крышки, показанной в трех разных положениях. В дальнейшем тексте описания название туловища использовано по аналогии с человеческой морфологией. Робот 20 содержит туловище 11 и три конечности 12, 13 и 14. Каждая из конечностей соединена с туловищем 11 соответственно при помощи приводного шарнира 22, 23 и 24. Для упрощения чертежей показан только приводной шарнир конечностей. Возможную форму конечностей можно представить себе из уже описанных фиг. 1а и 1b. На фиг. 2а-2с робот показан со спины и в положении стоя. По месту установки и по движениям относительно туловища конечности 12, 13 и 14 подобны соответственно левому плечу, правому плечу и голове. Робот может также содержать одну или несколько нижних конечностей , не показанных на фиг. 2а-2с, которые могут быть подобны конечностям, показанным на фиг. 1а и 1b.
Туловище 11 робота 20 содержит опорную ячеистую конструкцию 11а и наружный кожух 11b. Предпочтительно опорная конструкция 11а выполнена из жесткого термопластического материала. На конструкции 11а можно закрепить различные устройства, например, такие как электронные модули или аккумуляторные батареи.
Шарниры 22 и 23 плеч 12 и 13 представляют собой два механизированных соединения вокруг двух осей вращения. Приводной шарнир 22 содержит неподвижную часть 22а, предназначенную для крепления на туловище 11, и подвижную часть 22b, приводящую в движение плечо 12 относительно туловища. Точно так же, приводной шарнир 23 содержит неподвижную часть 23а, закрепленную на туловище 11, и подвижную часть 23b, приводящую в движение плечо 13. Шарнир 24 головы 14 является механизированным соединением вокруг трех осей вращения. Шарнир 24 содержит неподвижную часть 24а и подвижную часть 24b.
Согласно изобретению, робот содержит устройство предварительного позиционирования и разъемного крепления конечностей 12, 13 и 14 на туловище 11. Устройство содержит:
- для каждой из конечностей 12, 13 и 14 средства для предварительного позиционирования упомянутой конечности на туловище 11, и
- единая крышка 25, соединенная с туловищем 11 и выполненная с возможностью разъемного крепления всех конечностей на туловище 11.
Крышка 25 является подвижной относительно туловища 11 и выполнен с возможностью перемещения между открытым положением, показанным на фиг. 2а, и закрытым положением, показанным на фиг.2с. На фиг. 2b крышка показана в промежуточном положении между открытым положением и закрытым положением. Крышка 25 соединена с туловищем 11 при помощи поворотного соединения 26 с горизонтальной осью. Поворотное соединение 26 расположено в нижней части крышки и выполнено таким образом, чтобы открытое положение крышки было стабильным за счет силы тяжести. Открытое положение крышки, показанное на фиг. 2а, рассчитано таким образом, чтобы оператор робота мог получить доступ к шарнирам конечностей и устанавливать и снимать каждую из конечностей.
Крышка может удерживаться в закрытом положении при помощи средств разъемного крепления. В представленном примере удержание в закрытом положении обеспечивают четыре винта (не показаны), проходящие через верхнюю часть крышки и взаимодействующие с четырьмя гайками 27, находящимися на туловище и распределенными вдоль продольной оси. В закрытом положении, показанном на фиг.2с, крышка 25 опирается на приводные шарниры, одновременно обеспечивая крепление всех конечностей относительно туловища.
Предпочтительно крышка содержит ячеистую конструкцию, выполненную из жесткого термопластического материала, аналогичного материалу опорной конструкции туловища.
Следует отметить, что на фиг. 2с показан наружный кожух 11b, частично покрывающий туловище 11. Предусмотрен наружный кожух, полностью покрывающий туловище 11. Предусмотрен также наружный кожух, покрывающий крышку 25. Предпочтительно наружные кожухи подвергают поверхностной обработке, придающей эстетичный вид туловищу робота.
На фиг. 3а и 3b представлены два вида в перспективе туловища и крышки в открытом положении. Устройство обеспечивает предварительное позиционирование и крепление конечностей при помощи их приводных шарниров. Каждой из конечностей 12, 13 и 14 соответствует полость, выполненная в туловище 11, при этом полости соответственно обозначены 32, 33 и 34. Каждая из полостей выполнена с возможностью вмещения приводного шарнира соответствующей конечности. Так, полость 32 по существу полутрубчатой формы выполнена с возможностью вмещения неподвижной части 22b по существу цилиндрической формы приводного шарнира 22.
Точно так же, в крышке выполнена полость, ассоциированная с каждой из конечностей. Крышка 25 содержит три полости 42, 43 и 44, соответствующие конечностям 12, 13 и 14. Каждая из полостей по существу полутрубчатой формы должна охватывать в закрытом положении крышки по существу цилиндрическую форму неподвижной части шарниров каждой из конечностей.
Устройство предварительного позиционирования и разъемного крепления содержит также первый набор мягких накладок 28, неподвижно соединенных с туловищем и расположенных в полостях 32, 33 и 34 туловища таким образом, чтобы располагаться между жесткой опорной конструкцией и неподвижной частью приводного шарнира конечностей. Устройство содержит также второй набор мягких накладок 29, неподвижно соединенных с крышкой и расположенных, в частности, в полостях 42, 43 и 44 крышки таким образом, чтобы в закрытом положении крышки располагаться между крышкой и неподвижной частью приводного шарнира конечностей.
В предпочтительном варианте выполнения изобретения мягкие накладки 28 и 29 выполнены из эластомерного пеноматериала. Таким образом, мягкие накладки выполнены с возможностью частично сжиматься, когда крышка находится в закрытом положении, для обеспечения равновесного и не гиперстатического удержания приводного шарнира каждой из конечностей относительно туловища.
На фиг. 4а и 4b детально показаны средства предварительного позиционирования и разъемного крепления шарнирных конечностей на туловище робота. Согласно предпочтительному признаку изобретения, устройство содержит средства предварительного позиционирования, соответствующие каждой из конечностей, и средства разъемного крепления, выполненные с возможностью крепления всех конечностей при помощи единой крышки. Для каждой из конечностей средства предварительного позиционирования содержат, с одной стороны, полость, выполненную в туловище и соответствующую упомянутой конечности и обозначенную выше позициями 32, 33 и 34. С другой стороны, они содержат средства для защелкивания приводного шарнира в полости, чтобы позиционировать и удерживать упомянутую конечность относительно туловища. Не выходя за рамки изобретения, можно предусмотреть разные варианты выполнения средств защелкивания. В примере, представленном на фигурах, защелкивание осуществляют при помощи набора продольных нервюр 36, выполненных на неподвижной цилиндрической части шарнира и предназначенных для вхождения в контакт с набором направляющих 37, выполненных в конструкции туловища вблизи полости. Во время установки шарнира сначала неподвижную часть располагают напротив полости, затем защелкивают, прижимая неподвижную часть к полости туловища. Усилие, которым действует оператор на неподвижную часть, позволяет за счет упругой деформации переместить направляющие 37, пока в них не зайдут нервюры 36. После захождения нервюры направляющая возвращается в свое первоначальное положение. При этом неподвижная часть удерживается в полости туловища, опираясь на мягкие накладки, при помощи набора нервюр и направляющих. Во время демонтажа шарнира оператор действует усилием на направляющие 37, чтобы вывести шарнир из полости туловища. Предпочтительно средства предварительного позиционирования могут быть выполнены таким образом, чтобы создавать усилие между шарниром и туловищем, превышающим усилие, создаваемое за счет простой силы тяжести между туловищем и конечностью. Таким образом, средства защелкивания позволяют позиционировать и временно удерживать конечность относительно туловища, при этом конечность не может выйти из своего гнезда и выпасть под действием силы тяжести без намеренного внешнего вмешательства со стороны оператора.
Устройство может также содержать средства разъемного электронного соединения между туловищем и по меньшей мере одной конечностью. В представленном примере устройство содержит средства разъемного соединения между туловищем и каждой из конечностей. Средства электронного соединения выполнены с возможностью обеспечения электрического питания и электронного возбуждения для приводного шарнира и/или других электрических устройств, таких как датчики (микрофон, оптический датчик и т.д.), приводы (шарниры локтя, кисти и т.д.). Предпочтительно устройство может быть выполнено таким образом, чтобы защелкивание конечности позволяло одновременно предварительно позиционировать конечность и соединять конечность с туловищем. Разъединение средств защелкивания обеспечивает также отсоединение средств разъемного электронного соединения. Средства 48 разъемного электронного соединения показаны на фиг. 4а.
Изобретение относится к устройству предварительного позиционирования и разъемного крепления конечностей относительно туловища робота. Оно относится также к роботу, оснащенному таким устройством предварительного позиционирования и крепления. Изобретение касается также способа монтажа и демонтажа конечностей такого робота. Операция монтажа конечности робота, оснащенного устройством предварительного позиционирования и крепления, содержит при этом следующие этапы:
- конечность предварительно позиционируют относительно туловища при помощи средств предварительного позиционирования; этот этап включает в себя следующие подэтапы:
- неподвижную часть шарнира конечности вводят в туловище и располагают ее напротив соответствующей полости в туловище,
- неподвижную часть защелкивают в полости на туловище таким образом, чтобы предварительно позиционировать конечность относительно туловища,
- конечность закрепляют на туловище при помощи средств разъемного крепления; причем этот этап включает в себя следующие подэтапы:
- крышку перемещают из открытого положения в закрытое положение,
- крышку закрепляют на туловище при помощи средств разъемного крепления; при этом неподвижную часть шарнира удерживают в положении относительно туловища при помощи крышки, которая частично сжимает мягкие накладки закрепленные на туловище и на крышке.
В рамках обратного способа операция демонтажа конечности робота, оснащенного устройством предварительного позиционирования и крепления, содержит следующие этапы:
- убирают средства крепления крышки,
- крышку перемещают из закрытого положения в открытое положение,
- неподвижную часть приводного шарнира отсоединяют от упомянутой конечности посредством усилия, превышающего усилие защелкивания,
- неподвижную часть приводного шарнира извлекают из полости туловища.
Наконец, изобретение относится к способу обслуживания робота или, более конкретно, к способу замены неисправной конечности робота, оснащенного устройством предварительного позиционирования и разъемного крепления, исправной конечности. Способ замены содержит этапы, на которых:
- убирают средства разъемного крепления,
- крышку перемещают из закрытого положения в открытое положение,
- снимают упомянутую неисправную конечность,
- упомянутую исправную конечность предварительно позиционируют в полости, ассоциированной с заменяемой конечностью,
- крышку перемещают в закрытое положение,
- опять устанавливают на место средства крепления.
Следует отметить, что, если устройство содержит средства разъемного электронного соединения, способ замены неисправной конечности дополнительно содержит этап, на котором отсоединяют средства разъемного электронного соединения, причем этот этап осуществляют до или одновременно с этапом снятия неисправной конечности, и этап, на котором подсоединяют средства разъемного электронного соединения, причем этом этап осуществляют до или одновременно с этапом предварительного позиционирования исправной конечности.
Изобретение относится к области подвижной робототехники, к устройству для предварительного позиционирования и для разъемного крепления шарнирных конечностей робота-гуманоида, а также к способу обслуживания, обеспечивающего простую и быструю замену неисправной шарнирной конечности запасной конечностью. Робот-гуманоид содержит туловище (11), несколько шарнирных конечностей (12,13,14), разъемно соединенных с туловищем (11), для каждой из шарнирных конечностей (12, 13, 14) средства (32,28,36,37) для предварительного позиционирования упомянутой шарнирной конечности (12, 13, 14) на туловище (11), и единую крышку (25), соединенную с туловищем (11) и выполненную с возможностью разъемного крепления всех шарнирных конечностей (12,13,14) к туловищу (11). Каждая из шарнирных конечностей (12,13,14) содержит приводной шарнир (22,23,24), при помощи которого упомянутую конечность (12,13,14) позиционируют и крепят на туловище (11) и приводят в движение относительно туловища (11). 3 н. и 9 з.п. ф-лы, 9 ил.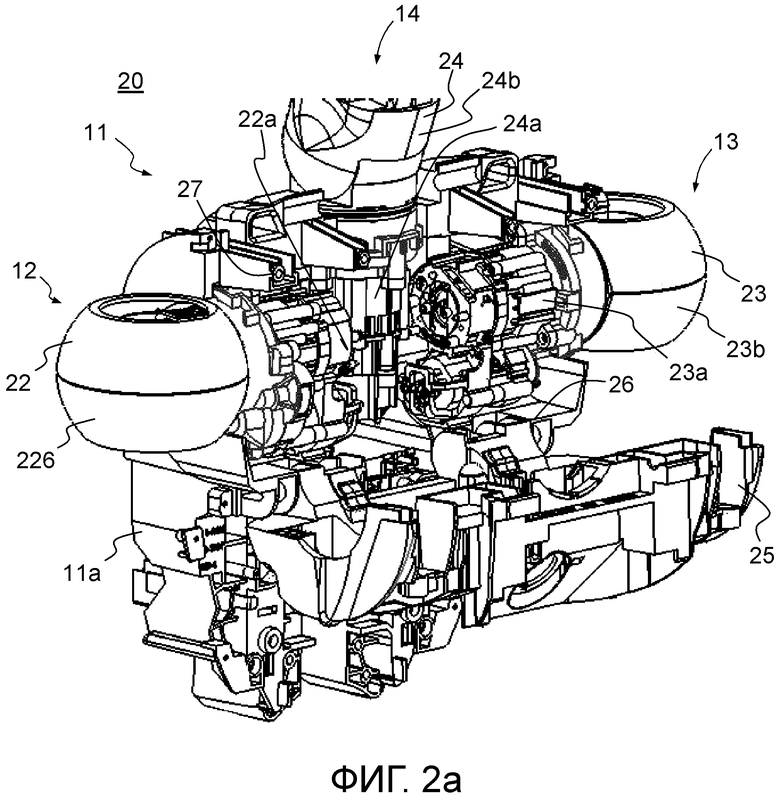
1. Робот-гуманоид, содержащий туловище (11) и несколько шарнирных конечностей (12,13,14), разъемно соединенных с туловищем (11), отличающийся тем, что он содержит:
- для каждой из нескольких шарнирных конечностей (12, 13, 14) средства (32,28,36,37) для предварительного позиционирования упомянутой шарнирной конечности (12, 13, 14) на туловище (11), и
- единую крышку (25), соединенную с туловищем (11) и выполненную с возможностью разъемного крепления всех шарнирных конечностей (12,13,14) к туловищу (11), причем
каждая из шарнирных конечностей (12,13,14) содержит приводной шарнир (22,23,24), при помощи которого упомянутую конечность (12,13,14) позиционируют и крепят на туловище (11) и приводят в движение относительно туловища (11).
2. Робот по п.1, в котором туловище (11) содержит полость (32), выполненную с возможностью взаимодействовать с шарнирной конечностью (12), вмещающую приводной шарнир (22а) упомянутой шарнирной конечности (12), и средства (36,37) для защелкивания приводного шарнира (22а) в полости (32), чтобы позиционировать и удерживать упомянутую шарнирную конечность (12) относительно туловища (11) за счет действия усилия, превышающего усилие, создаваемое силой тяжести между туловищем (11) и упомянутой шарнирной конечностью (12).
3. Робот по п. 2, в котором средства (32,28,36,37) защелкивания одной из шарнирных конечностей (12) содержат набор нервюр (36), выполненных в приводном шарнире (22а) и взаимодействующих с набором направляющих (37), выполненных в полости (32), ассоциированной с упомянутой шарнирной конечностью (12).
4. Робот по п. 2 или 3, в котором крышка (25) выполнена подвижной относительно туловища (11) с возможностью перемещения между открытым положением, позволяющим для каждой из шарнирных конечностей (12,13,14) позиционировать и убирать приводной шарнир (22,23,24) относительно туловища (11), и закрытым положением, в котором крышка (25) опирается на приводные шарниры (22,23,24) всех шарнирных конечностей (12,13,14), при этом робот содержит средства (27) разъемного крепления для удержания крышки (25) в закрытом положении.
5. Робот по п. 4, в котором крышка (25) соединена с туловищем (11) при помощи поворотного соединения (26), выполненного с возможностью обеспечения перемещения крышки (25) поворотом между открытым положением и закрытым положением таким образом, чтобы крышка (25) удерживалась в открытом положении за счет силы тяжести.
6. Робот по п. 4, содержащий для одной из шарнирных конечностей (12) первый и второй наборы мягких накладок (28,29), неподвижно соединенных соответственно с крышкой (25) и полостью (32), соответствующей упомянутой шарнирной конечности (12), и выполненных с возможностью сжатия, обеспечивая удержание приводного шарнира (22), позиционированного и закрепленного на туловище (11).
7. Робот по п. 6, в котором мягкие накладки (28,29) выполнены из эластомерного пеноматериала.
8. Робот по п. 1, содержащий для каждой из шарнирных конечностей (12,13,14) средства (48) разъемного электронного соединения.
9. Робот по п. 1, в котором шарнир (22) одной из шарнирных конечностей (12) механизирован вокруг двух или трех осей вращения.
10. Робот по п. 1, содержащий три шарнирных конечности (12,13,14), при этом одна из шарнирных конечностей (14), шарнирно установленная вокруг трех осей вращения относительно туловища (11), подобна голове, и две из шарнирных конечностей (12,13), шарнирно установленных вокруг двух осей вращения относительно туловища (11) и расположенных с двух сторон от туловища (11), подобны рукам.
11. Способ замены шарнирной конечности робота-гуманоида по п. 4 характеризующийся тем, что он содержит этапы, на которых:
- убирают средства (27) разъемного крепления,
- крышку (25) перемещают в открытое положение,
- убирают неисправную шарнирную конечность,
- исправную шарнирную конечность предварительно позиционируют в полости (32), ассоциированной с неисправной шарнирной конечностью,
- крышку (25) перемещают в закрытое положение,
- устанавливают обратно средства (27) крепления.
12. Способ замены шарнирной конечности робота-гуманоида по п. 8 характеризующийся тем, что он содержит этапы, на которых:
соответственно отсоединяют и подсоединяют средства (48) электронного соединения между роботом и соответственно неисправной шарнирной конечностью и исправной шарнирной конечностью.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

