Область Техники, к которой Относится Изобретение
Представленное описание относится к уплотнительной системе для установки динамического уплотнения между вращающимся валом и его опорой, в частности валом турбонасоса. Представленное описание также относится к подобному турбонасосу.
Состояние предшествующего уровня техники
Турбонасос обычно содержит (см., например, Фигуру 3 патентной заявки FR 2 772 843 A1) турбинные элементы, которые подают струю горячего газа для того, чтобы приводить в движение вращающийся вал; и насосные элементы, приводимые во вращение вращающимся валом для того, чтобы приводить в движение жидкость, напр., жидкий водород для подачи в ракетный двигатель.
Подобному турбонасосу необходимо иметь уплотнительную систему, которая способна обеспечивать динамическое уплотнение вращающегося вала на поверхности раздела между элементом турбины и элементом насоса для того, чтобы предотвращать столкновение толкающей газовой струи с нагнетаемой жидкостью. Подобная система должна быть способна обеспечить уплотнение, которое является непрерывным, даже когда вращающийся вал подвергается воздействию поперечных движений, главным образом в результате вибрации, воздействию которой вал подвергается при высокой скорости вращения (вал турбонасоса может вращаться со скоростью несколько десятков тысяч оборотов в минуту).
Известно, что подобная уплотнительная система состоит из кольца, которое установлено с возможностью плавания в опоре вращающегося вала. Подобное кольцо служит, чтобы следовать поперечным движениям вращающегося вала для того, чтобы предотвращать всякое разрушение динамического уплотнения, вызываемое подобными движениями и возможными контактами с ротором.
В отличие от этого, необходимо предотвращать поворот подобного плавающего кольца вокруг оси вращения вращающегося вала при движении вала. Текучая среда, вращающаяся между вращающимся валом и кольцом (особенно когда текучая среда является вязкой), и возможность контактов между вращающимся валом и кольцом служат для создания крутящего момента вокруг оси вращения вращающегося вала, причем необходимо противостоять данному крутящему моменту для того, чтобы избегать любых ударов с большой скоростью, которые в противном случае могли бы быть вызваны кольцом.
Для того, чтобы избежать подобного вращения, кольцо соединено непосредственно с опорой посредством одного или более антиротационных штифтов, равномерно разнесенных по окружности плавающего кольца и взаимодействующих со связанными с ними элементами соединений, которые образованы в опоре.
Главный недостаток данного решения состоит в том, что наличие антиротационного штифта (штифтов) мешает работе кольца (его способности плавать), и он существует независимо от улучшений, которые были разработаны до сих пор (уменьшение зазора, увеличение осевой длины кольца и т.д....). Последствиями подобного нарушения могут быть:
- потеря способности плавать;
- наклон кольца вокруг одного или более штифтов;
- контакт между валом и кольцом, могущий повреждать кольцо или подвергаться преждевременному износу и увеличенным утечкам;
- нестабильность в работе кольца; и
- затупление кромок или антиротационных штифтов.
Таким образом, существует потребность в разработке уплотнительной системы, которая способна обеспечивать динамическое уплотнение между вращающимся валом и его опорой таким образом, чтобы она была надежной и эффективной.
Сущность Изобретения
Первый аспект представленного описания относится к уплотнительной системе по меньшей мере для одного установленного в плавающем состоянии кольца в опоре для вращающегося вала, способного вращаться вокруг оси, направленной вдоль продольного направления для того, чтобы обеспечить динамическое уплотнение между валом и опорой. Система содержит соединительную часть, помещенную между кольцом и опорой, посредством которой кольцо прикрепляют к опоре. Опора и соединительная часть содержат соответствующие элементы первого соединения, подходящие для совместного действия с целью предоставления первого кинематического соединения, обеспечивающего возможность относительного движения соединения цилиндрического типа между опорой и соединительной частью относительно первого поперечного направления. Кольцо и соединительная часть содержат соответствующие элементы второго соединения, подходящие для совместного действия с целью предоставления второго кинематического соединения, обеспечивающего возможность относительного движения соединения цилиндрического типа между кольцом и соединительной частью относительно второго поперечного направления, перпендикулярного первому поперечному направлению.
В представленном описании термин «продольное направление» используется для обозначения направления, параллельного оси вращения вращающегося вала, причем данная ось вращения, таким образом, направлена в продольном направлении.
В представленном описании термин «поперечное направление» используется для обозначения направления, лежащего в плоскости, перпендикулярной упомянутому выше продольному направлению. Таким образом, подобное направление может упоминаться, как «радиальное направление» относительно оси вращения вращающегося вала. Таким образом, в представленном описании подобная перпендикулярная плоскость упоминается, как «поперечная плоскость». Также она может упоминаться, как «радиальная плоскость», относительно оси вращения вращающегося вала.
В представленном описании термин «первое кинематическое соединение, обеспечивающее возможность относительного движения соединения цилиндрического типа между опорой и соединительной частью относительно первого поперечного направления», используется для обозначения соединения между опорой и соединительной частью, которое обеспечивает возможность следования двум степеням свободы движения между опорой и соединительной частью:
- движения с вращением опоры и соединительной части друг относительно друга вокруг первого поперечного направления, перпендикулярного продольному направлению; и
- движения с поступательным перемещением опоры и соединительной части друг относительно друга вдоль того же самого первого поперечного направления.
Аналогично, в представленном описании термин «второе кинематическое соединение, обеспечивающее возможность относительного движения соединения цилиндрического типа между кольцом и соединительной частью относительно второго поперечного направления, перпендикулярного первому поперечному направлению», используется для обозначения соединения между кольцом и соединительной частью, которое обеспечивает возможность следования двум степеням свободы движения между кольцом и соединительной частью:
- движения с вращением кольца и соединительной части друг относительно друга относительно второго поперечного направления, которое перпендикулярно продольному направлению и которое перпендикулярно первому поперечному направлению; и
- движения с поступательным перемещением кольца и соединительной части друг относительно друга вдоль указанного второго поперечного направления.
Таким образом, за счет вставки соединительной части, которая отделена от кольца, между кольцом и опорой, чтобы отсоединить компоненты движения в двух поперечных направлениях, которые являются перпендикулярными друг относительно друга посредством первого и второго кинематических соединений, описанного выше типа, кольцо способно следовать любому поперечному движению вращающегося вала, является ли то движение движением вращения или поступательным движением.
Также может быть эффективно достигнуто уплотнение, называемое «главное» уплотнение, предоставленное на поверхности раздела между соответствующими периферийными поверхностями вращающегося вала и кольца.
Одновременно, тот факт, что первое и второе соединения цилиндрического типа направлены, соответственно, относительно первого и второго поперечных направлений, которые оба перпендикулярны продольному направлению, вокруг которого вращается вращающийся вал, предотвращает поворот как кольца, так и соединительной части вокруг продольного направления. Конкретно, среди шести возможных степеней свободы передвижения кольца относительно опоры, только степень свободы, которая устраняется (игнорируя на практике рабочие зазоры) данной уплотнительной системой, представляет собой степень свободы, которая соответствует кольцу, выполняющему движение при вращении вокруг продольного направления (причем данная степень свободы особенно хорошо устраняется на практике, когда зазоры, которые существуют между элементами первого и второго соединений, являются небольшими).
Таким образом, данное решение обеспечивает возможность предоставления динамического уплотнения между вращающимся валом и опорой, причем данное уплотнение является как надежным, так и эффективным. Кольцо может легко следовать поперечным движениям вращающегося вала, с предотвращением в то же время приведения во вращение валом вокруг продольного направления.
Данное решение также может быть осуществлено компактно, поскольку соединительная часть может быть помещена радиально между кольцом и опорой.
В некоторых вариантах осуществления система может быть такой, что каждый из элементов первого соединения является недеформируемым (в нормальных условиях использования уплотнительной системы).
Таким образом, когда соответствующие элементы первого соединения опоры и соединительной части обоюдно взаимодействуют для предоставления первого кинематического соединения, ни один из данных элементов первого соединения не деформируется (в нормальных условиях использования уплотнительной системы).
В некоторых вариантах осуществления система может быть такой, что каждый из элементов второго соединения является недеформируемым (в нормальных условиях использования уплотнительной системы).
Таким образом, когда соответствующие элементы второго соединения кольца и соединительной части обоюдно взаимодействуют для предоставления второго кинематического соединения, ни один из элементов данного соединения не деформируется (в нормальных условиях использования уплотнительной системы).
В некоторых вариантах осуществления система может быть такой, что по меньшей мере один из элементов первого соединения подходит для упругой деформации, при сдавливании и/или при сгибании и/или при скручивании, по необходимости (в нормальных условиях использования уплотнительной системы).
Таким образом, когда соответствующие элементы первого соединения опоры и соединительной части обоюдно взаимодействуют для предоставления первого кинематического соединения, по меньшей мере один из данных элементов первого соединения (т.е. только один или каждый из элементов первого соединения, относящихся к опоре, и/или только один или каждый из элементов первого соединения, относящихся к соединительной части, по необходимости) упруго деформируется при сдавливании и/или при сгибании и/или при скручивании, по необходимости (в нормальных условиях использования уплотнительной системы).
В некоторых вариантах осуществления система может быть такой, что по меньшей мере один из элементов второго соединения подходит для упругой деформации, при сдавливании и/или при сгибании и/или при скручивании, по необходимости (в нормальных условиях использования уплотнительной системы).
Таким образом, когда соответствующие элементы второго соединения кольца и соединительной части обоюдно взаимодействуют для предоставления второго кинематического соединения, по меньшей мере один из данных элементов второго соединения (т.е. только один или каждый из элементов второго соединения, относящихся к кольцу, и/или только один или каждый из элементов второго соединения, относящихся к соединительной части, по необходимости) упруго деформируется при сдавливании и/или при сгибании и/или при скручивании, по необходимости (в нормальных условиях использования уплотнительной системы).
В некоторых вариантах осуществления система может быть такой, что она имеет единственную пару элементов первого соединения, относящихся соответственно к опоре и к соединительной части и выполненных с возможностью обоюдного взаимодействия.
В некоторых вариантах осуществления система может быть такой, что она содержит по меньшей мере первую пару элементов первого соединения, относящихся соответственно к опоре и к соединительной части и выполненных с возможностью обоюдного взаимодействия; и вторую пару элементов первого соединения, относящихся соответственно к опоре и к соединительной части и выполненных с возможностью обоюдного взаимодействия, причем данные первая и вторая пары отделены промежутком друг от друга вдоль первого поперечного направления.
В некоторых вариантах осуществления система может быть такой, что она содержит единственную пару элементов второго соединения, относящихся, соответственно, к кольцу и к соединительной части и выполненных с возможностью обоюдного взаимодействия.
В некоторых вариантах осуществления система может быть такой, что она содержит по меньшей мере первую пару элементов второго соединения, относящихся, соответственно, к кольцу и к соединительной части и выполненных с возможностью обоюдного взаимодействия; и вторую пару элементов второго соединения, относящихся, соответственно, к кольцу и к соединительной части и выполненных с возможностью обоюдного взаимодействия, причем данные первая и вторая пары отделены промежутком друг от друга вдоль второго поперечного направления.
В некоторых вариантах осуществления система может быть такой, что опора и кольцо содержат соответствующие элементы третьего соединения, подходящие для совместного действия с целью предоставления третьего кинематического соединения, обеспечивающего возможность относительного движения соединения плоского типа между опорой и кольцом в поперечной плоскости.
В представленном описании термин «третье кинематическое соединение, обеспечивающее возможность относительного движения соединения плоского типа между опорой и кольцом в поперечной плоскости» используется для обозначения соединения между опорой и кольцом, которое допускает следующие три степени свободы движения между опорой и кольцом:
- поступательное движение кольца и опоры друг относительно друга вдоль первого поперечного направления; и
- поступательное движение кольца и опоры друг относительно друга вдоль второго поперечного направления; и
- вращательное движение кольца и опоры друг относительно друга вокруг продольной оси (даже хотя на практике, как упоминалось выше, из-за наличия первого и второго кинематических соединений, данная свобода вращательного движения является весьма ограниченной, поскольку также ограничены зазоры, предоставленные между элементами первых и вторых соединений).
Подобное соединение плоского типа между опорой и кольцом обеспечивает возможность предоставления эффективного уплотнения, называемого «дополнительное» уплотнение на поверхности раздела между двумя соответствующими поверхностями поперечной плоскости опоры и кольца, которые заключают в себе соответствующие элементы третьего соединения.
Разделение упомянутого выше главного уплотнения, которое установлено между вращающимся валом и кольцом, и дополнительного уплотнения, которое установлено между кольцом и опорой, может облегчить получение эффективного общего уплотнения между вращающимся валом и опорой.
Кроме того, тот факт, что кольцо имеет возможность поворачиваться как вокруг первого поперечного направления, так и вокруг второго поперечного направления, вследствие первого и второго кинематических соединений вышеупомянутого типа, способствует обеспечению непрерывности плоского контакта в поперечной плоскости, который устанавливают за счет третьего кинематического соединения между кольцом и опорой.
В некоторых вариантах осуществления система может быть такой, что она содержит смещающий элемент, подходящий для взаимодействия с опорой и кольцом для смещения взаимодействия между соответствующими элементами третьего соединения.
Подобный смещающий элемент также может участвовать в обеспечении непрерывности упомянутого выше плоского контакта за счет приложения возвратного усилия, прижимающего опору и кольцо друг к другу.
В некоторых вариантах осуществления система может быть такой, что соединительная часть и смещающий элемент отделены друг от друга.
В некоторых вариантах осуществления система может быть такой, что соединительная часть и смещающий элемент образованы в виде единого блока, упрощая посредством этого систему, делая ее более компактной в продольном и/или поперечном направлении.
В некоторых вариантах осуществления система может быть такой, что поперечная плоскость и смещающий элемент расположены продольно по обе стороны кольца.
Таким образом, смещающий элемент отделен промежутком в продольном направлении от поперечной плоскости, в которой между опорой и кольцом установлен плоский контакт, при этом кольцо помещено между смещающим элементом и данной плоскостью.
Во втором аспекте представленного описания предоставлен турбонасос, имеющий вращающийся вал и уплотнительную систему в соответствии с упомянутым выше первым аспектом.
Тем не менее, без выхода за границы представленного описания, можно было бы предусмотреть возможность установки уплотнительной системы в ротационной машине, не являющейся турбомашиной или турбонасосом, в том случае, если подобная ротационная машина содержит по меньшей мере один вращающийся вал, где необходимо обеспечить динамическое уплотнение.
Вышеупомянутые и другие характеристики и преимущества становятся более очевидными при чтении следующего подробного описания вариантов осуществления, которые не носят ограничительного характера и которые приведены исключительно в качестве иллюстрации. Данное подробное описание ссылается на сопровождающие чертежи.
Краткое Описание Чертежей
Сопровождающие чертежи являются схематичными, а не масштабными, и они прежде всего стремятся показать принципы, изложенные в представленном описании. На сопровождающих чертежах:
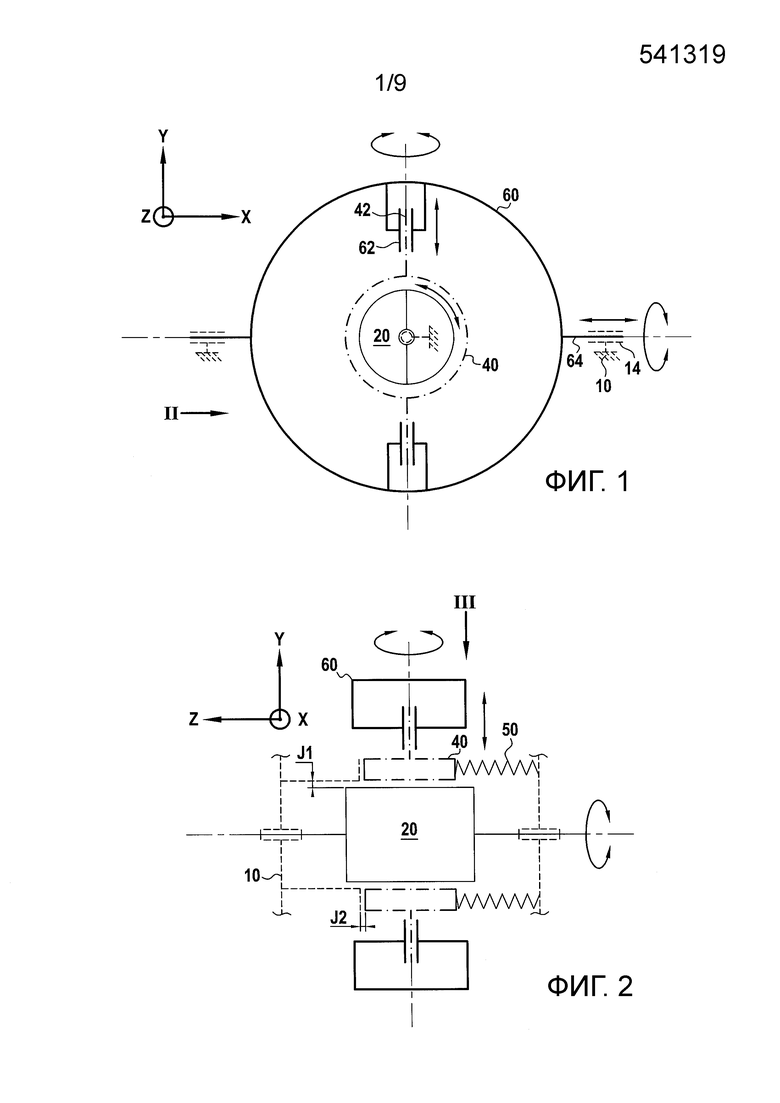
Фигура 1 представляет собой первую кинематическую схему уплотнительной системы в соответствии с представленным описанием, если смотреть со стороны поперечной плоскости;
Фигура 2 представляет собой вторую кинематическую схему уплотнительной системы, если смотреть со стороны первой продольной плоскости, проходящей в первом поперечном направлении;
Фигура 3 представляет собой третью кинематическую схему уплотнительной системы, если на нее смотреть со стороны второй продольной плоскости, проходящей во втором поперечном направлении, перпендикулярном первому поперечному направлению;
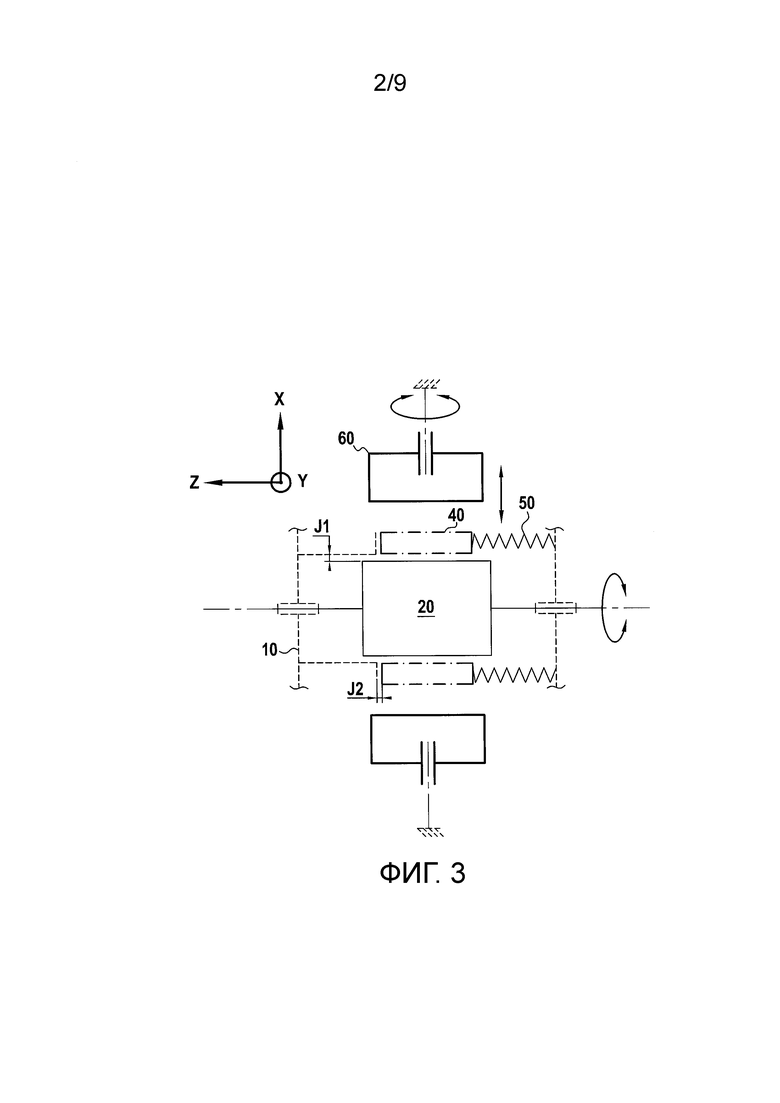
Фигура 4 представляет собой вид в разрезе в поперечной плоскости первого варианта осуществления уплотнительной системы в соответствии с представленным описанием, на котором вращающийся вал занимает первое положение в данной поперечной плоскости;
Фигура 5 представляет собой изображение, аналогичное изображению фигуры 4, на котором вращающийся вал занимает второе положение в данной поперечной плоскости;
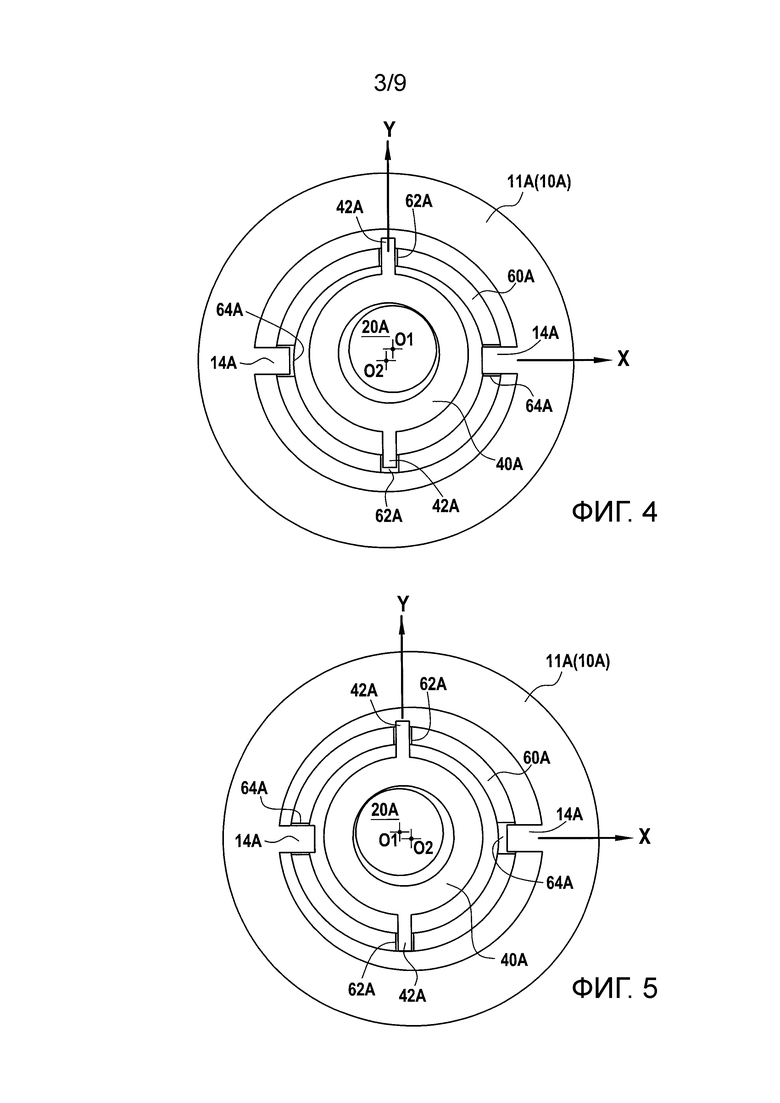
Фигура 6 представляет собой перспективное изображение в разобранном виде данного первого варианта осуществления;
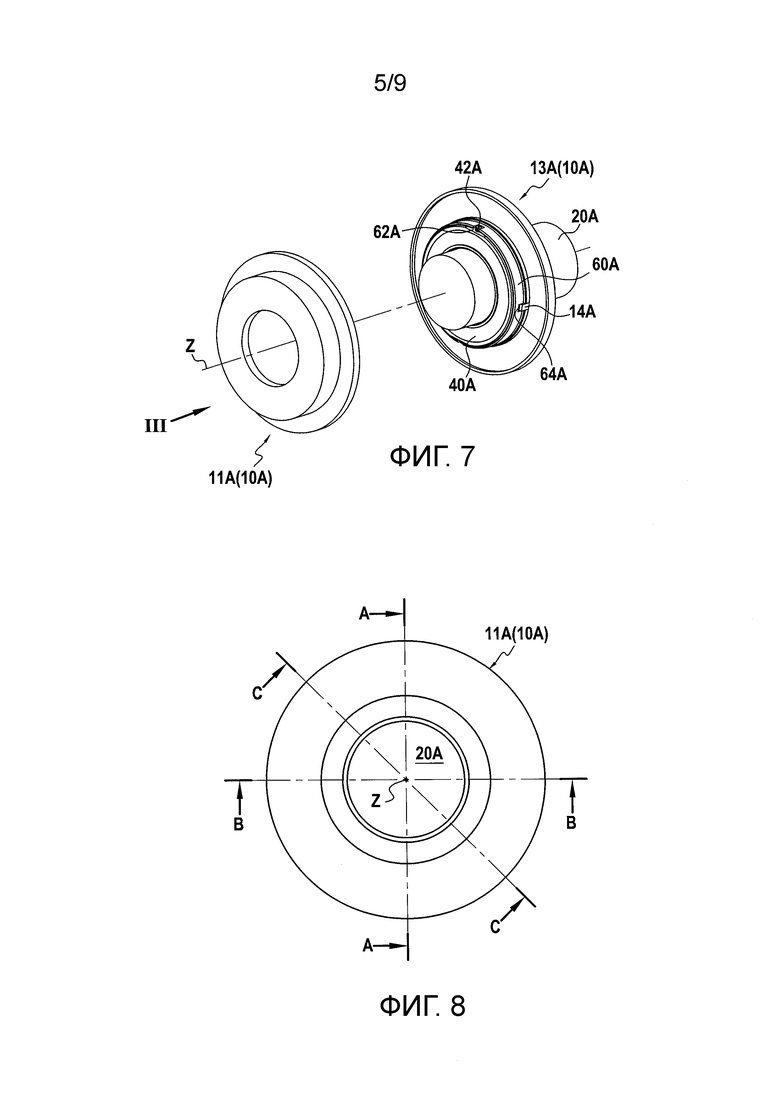
Фигура 7 представляет собой изображение, аналогичное фигуре 6, на котором показана только первая опорная часть, отделенная от другой части;
Фигура 8 представляет собой плоское изображение в поперечной плоскости данного первого варианта осуществления;
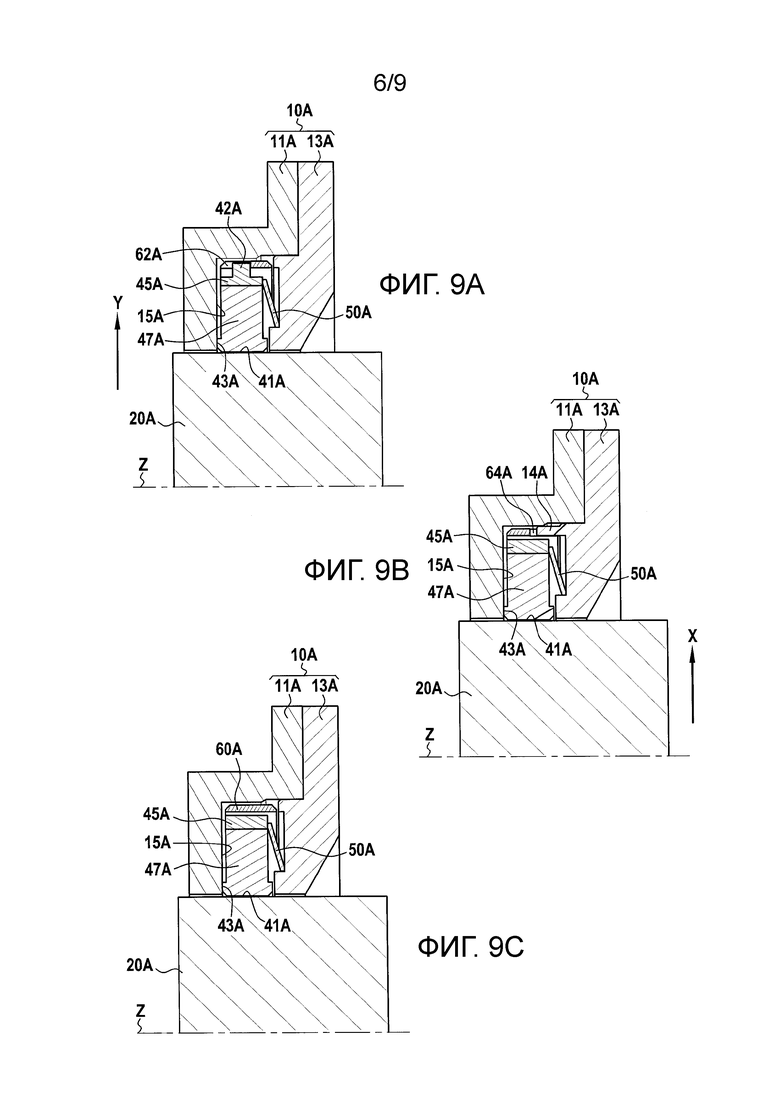
Фигуры 9A, 9B и 9C представляют собой фрагментарные изображения в разрезе соответствующих плоскостей A-A (вдоль второго поперечного направления Y), B-B (вдоль первого поперечного направления X) и C-C, как показано на фигуре 8;
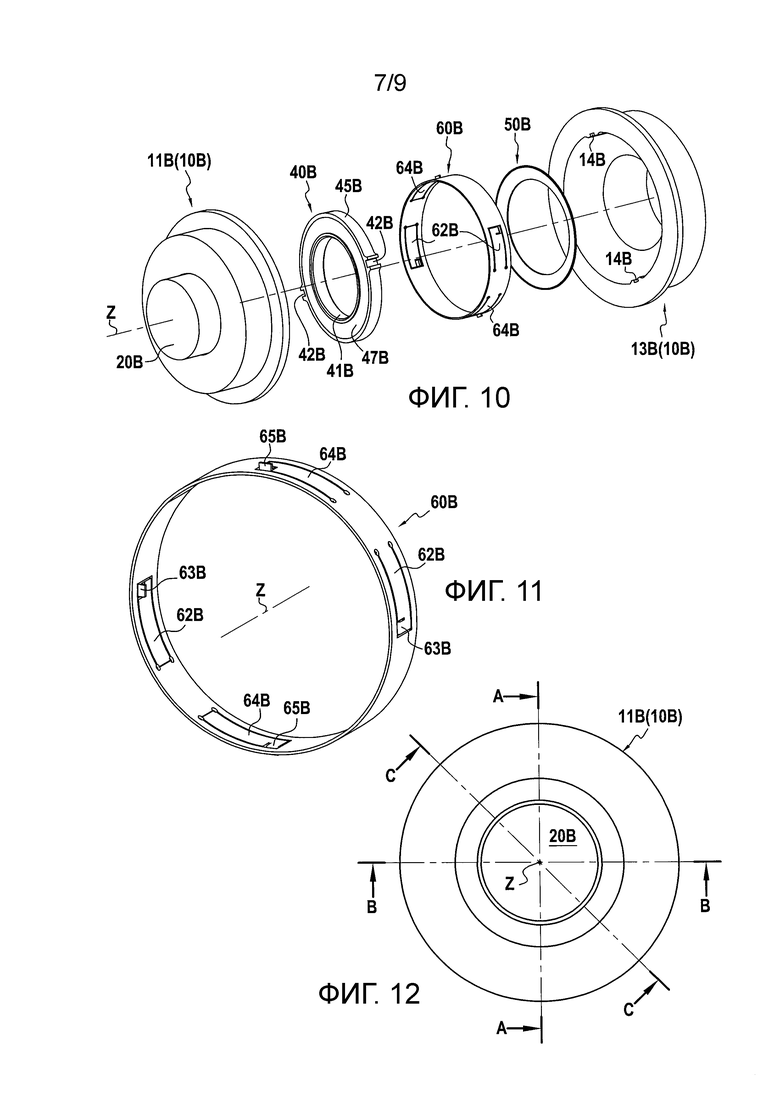
Фигура 10 представляет собой перспективное изображение в разобранном виде второго варианта осуществления уплотнительной системы в соответствии с представленным описанием;
Фигура 11 представляет собой перспективное изображение соединительной части данного второго варианта осуществления, показанного отдельно;
Фигура 12 представляет собой плоское изображение в поперечной плоскости данного второго варианта осуществления;
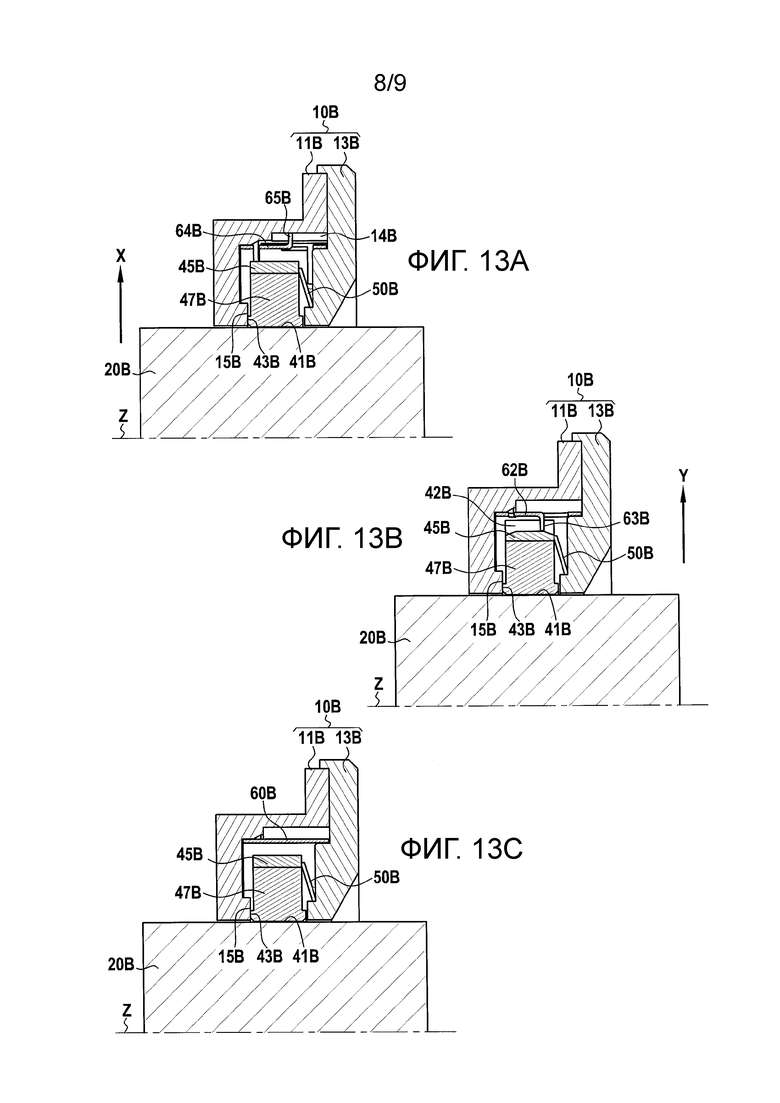
Фигуры 13A, 13B и 13C представляют собой фрагментарные изображения в разрезе, соответственно, в плоскостях A-A (вдоль первого поперечного направления X), B-B (вдоль второго поперечного направления Y) и C-C, как показано на фигуре 12;
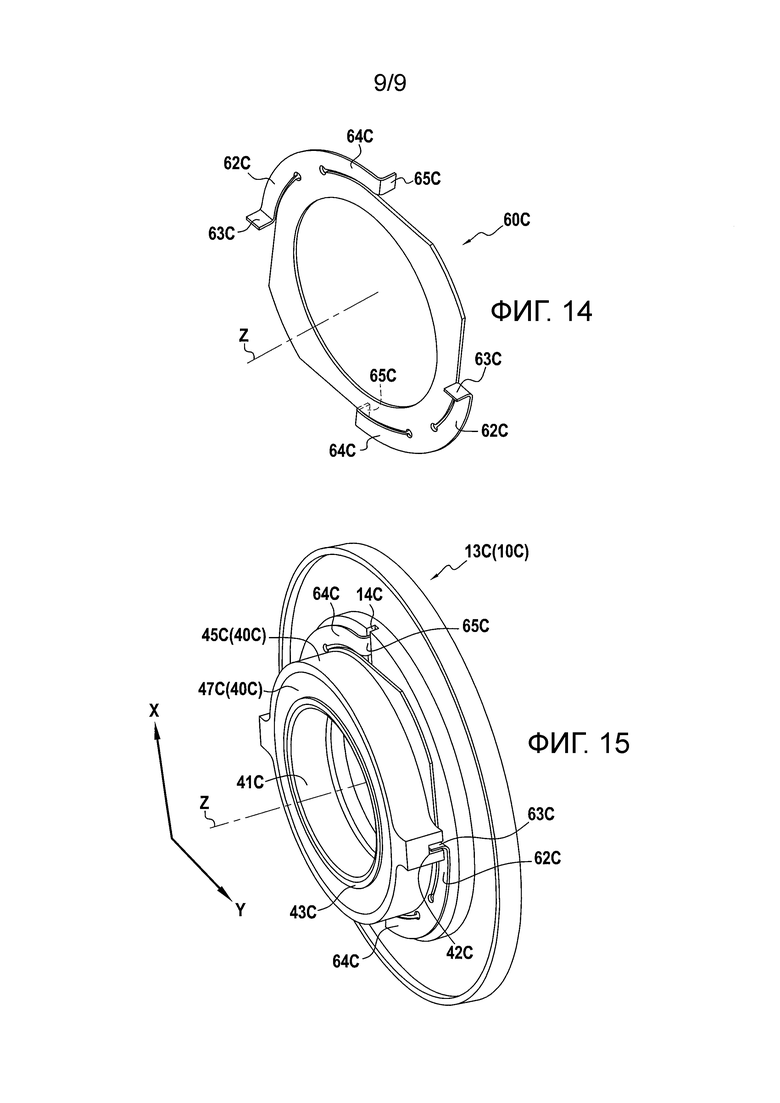
Фигура 14 представляет собой перспективное изображение соединительной части в третьем варианте осуществления данной уплотнительной системы в соответствии с представленным описанием; а
Фигура 15 представляет собой фрагментарное перспективное изображение данного третьего варианта осуществления.
Подробное Описание Вариантов Осуществления
Фигуры 1-3 представляют собой кинематические схемы, показывающие уплотнительную систему в соответствии с представленным описанием, а элементы, показанные на данных фигурах, связаны с числовыми ссылками.
Подобная уплотнительная система может быть осуществлена в качестве примера и не обязательно в виде любого из трех вариантов осуществления, показанных на фигурах 4-15.
Более точно, на фигурах 4-9C показан первый вариант осуществления, а элементы, показанные на данных фигурах, связаны с числовыми ссылками, соответствующими числовым ссылкам, используемым на фигурах 1-3, за которыми в данном варианте осуществления следует буква «A» для идентификации данного первого варианта осуществления.
На фигурах 10-13C показан второй вариант осуществления, а элементы, показанные на данных фигурах, связаны с числовыми ссылками, соответствующими числовым ссылкам, используемым на фигурах 1-3 за которыми в данном примере следует буква «B», для идентификации данного второго варианта осуществления.
На фигурах 14 и 15 показан третий вариант осуществления, а элементы, показанные на данных фигурах, связаны с числовыми ссылками, соответствующими числовым ссылкам, используемым на фигурах 1-3, за которыми в данном варианте осуществления следует буква «C», для идентификации данного третьего варианта осуществления.
Описание начинается с характеристик, которые произвольно считаются общими для каждого из данных вариантов осуществления.
Уплотнительная система в соответствии с представленным описанием представляет собой уплотнительную систему, имеющую по меньшей мере одно установленное в плавающем состоянии кольцо 40, 40A-81C (т.е. 40, 40A, 40B и 40C, данное условное обозначение одинаково применимо для других числовых ссылок ниже) в опоре 10, 10A-1°C вала 20, 20A-20C, способного вращаться вокруг оси, продолжающейся вдоль продольного направления Z для того, чтобы обеспечить динамическое уплотнение между валом 20, 20A-2°C и опорой 10, 10A-10C.
Уплотнительная система содержит соединительную часть 60, 60A-60C, помещенную между кольцом 40, 40A-4°C и опорой 10, 10A-10C, посредством которой кольцо 40, 40A-4°C прикрепляют к опоре 10, 10A-10C.
Опора 10, 10A-1°C и соединительная часть 60, 60A-6°C содержат соответствующие элементы 14, 14A-14C и 64, 64A-64C первого соединения, подходящие для совместного действия с целью предоставления первого кинематического соединения, обеспечивающего возможность относительного движения типа скользящего поворота между опорой 10, 10A-1°C и соединительной частью 60, 60A-6°C (т.е. соединения цилиндрического типа), направленного вдоль первого поперечного направления X, которое образовано в поперечной плоскости, которая перпендикулярна продольному направлению Z.
Посредством данного первого кинематического соединения как опоре 10, 10A-10C, так и соединительная часть 60, 60A-6°C могут поступательно двигаться друг относительно друга вдоль первого поперечного направления X, а также могут поворачиваться друг относительно друга вокруг первого поперечного направления X.
Кольцо 40, 40A-4°C и соединительная часть 60, 60A-6°C содержат соответствующие элементы 42, 42A-42C и 62, 62A-62C второго соединения, подходящие для совместного действия с целью создания второго кинематического соединения, обеспечивающего возможность относительного движения типа скользящего поворота между кольцом 40, 40A-4°C и соединительной частью 60, 60A-60C, направленного вдоль второго поперечного направления Y, которое перпендикулярно первому поперечному направлению X и перпендикулярно продольному направлению Z.
Посредством данного второго кинематического соединения кольцо 40, 40A-4°C и соединительная часть 60, 60A-6°C могут как поступательно двигаться друг относительно друга вдоль второго поперечного направления Y, так и поворачиваться друг относительно друга вокруг второго поперечного направления Y.
Таким образом, уплотнение J1, называемое «главное» уплотнение (см. Фигуры 2 и 3), может эффективно достигаться на поверхности раздела между периферийной поверхностью вращающегося вала 20, 20A-2°C и периферийной поверхностью 41A-41C кольца 40, 40A-40C, причем оно продолжает оставаться эффективным даже в случае поперечных движений вращающегося вала 20, 20A-2°C относительно опоры 10, 10A-1°C (т.е. любого движения отдельно или в комбинации среди поступательного движения вдоль первого поперечного направления X, поступательного движения вдоль второго поперечного направления Y, вращательного движения вокруг оси, образованной первым поперечным направлением X, и вращательного движения вокруг оси, образованной вторым поперечным направлением Y).
В данных примерах вращающийся вал 20, 20A-2°C представляет собой вращающийся вал ротационной машины, в частности турбомашины, конкретно турбонасоса (не показано), содержащего уплотнительную систему для предоставления уплотнения между элементом насоса и элементом турбины турбонасоса.
В данных примерах уплотнительная система содержит первую пару элементов 14, 14A-14C и 64, 64A-64C первого соединения, относящихся, соответственно, к опоре 10, 10A-1°C и к соединительной части 60, 60A-6°C и выполненных с возможностью обоюдного взаимодействия; и вторую пару элементов 14, 14A-14C и 64, 64A-64C первого соединения, относящихся, соответственно, к опоре 10, 10A-1°C и к соединительной части 60, 60A-6°C и выполненных с возможностью обоюдного взаимодействия, причем данные первая и вторая пары отделены промежутком друг от друга вдоль первого поперечного направления X, в частности за счет расположения под углом 180° друг к другу вокруг оси, продолжающейся вдоль продольного направления Z (см. В частности Фигуру 1).
В данных примерах уплотнительная система содержит первую пару элементов 42, 42A-42C и 62, 62A-62C второго соединения, относящихся соответственно к кольцу 40, 40A-4°C и к соединительной части 60, 60A-6°C и выполненных с возможностью обоюдного взаимодействия; и вторую пару элементов 42, 42A-42C и 62, 62A-62C второго соединения, относящихся соответственно к кольцу 40, 40A-4°C и к соединительной части 60, 60A-6°C и выполненных с возможностью обоюдного взаимодействия, причем данные первая и вторая пары отделены промежутком друг от друга вдоль второго поперечного направления Y, в частности за счет расположения под углом 180°C друг к другу относительно оси, направленной вдоль продольного направления Z.
В данных примерах кольцо 40, 40A-4°C состоит из двух в общем кольцевых частей 45A-45C и 47A-47C, которые являются отдельными и концентрическими и которые соединены вместе с образованием единого блока. В частности, первая из данных двух кольцевых частей 47A-47C, которая имеет меньший наружный диаметр и которая должна иметь вращающийся вал 20A-20C, проходящий прямо через нее, изготовлена из материала, который мягче, чем материал, образующий вращающийся вал, отдавая предпочтение износу периферийной поверхности 41A-41C данной первой кольцевой части перед износом периферийной поверхности вращающегося вала, которая должна быть обращена к периферийной поверхности 41A-41C для того, чтобы образовать главное уплотнение. Кроме того, в данном примере, вторая из данных двух кольцевых частей 45A-45C, которая имеет больший наружный диаметр, жестко соединена с первой кольцевой частью 47A-47C (т.е. Как только они соединены вместе, две кольцевые части не могут двигаться друг относительно друга). Элементы 42A-42C второго соединения, связанные с кольцом 40, 40A-40C, образованы в данной второй кольцевой части 45A-45C.
В данных примерах соединительная часть 60, 60A-60C:
- имеет общую кольцевую форму;
- состоит из единой части; и
- изготовлена из металлического материала.
В данных примерах опора 10, 10A-1°C и кольцо 40, 40A-4°C содержат соответствующие элементы 15A, 15B, 43A-43C третьего соединения, подходящие для совместного действия с целью предоставления третьего кинематического соединения, обеспечивающего возможность относительного движения между опорой 10, 10A-1°C и кольцом 40, 40A-4°C типа подшипника скольжения (т.е. соединения плоского типа) в поперечной плоскости, перпендикулярной продольному направлению Z.
Таким образом, на поверхности раздела между поперечной торцевой поверхностью 15A, 15B опоры 10, 10A-1°C и поперечной торцевой поверхностью 43A-43C кольца 40, 40A-4°C может быть эффективно предоставлено уплотнение J2, называемое «дополнительное» уплотнение (см. Фигуры 2 и 3). Как показывает его название, данные поперечные торцевые поверхности перпендикулярны продольному направлению Z.
В данных примерах уплотнительная система содержит смещающий элемент 50, 50A, 50B, подходящий для взаимодействия с опорой 10, 10A-1°C и кольцом 40, 40A-4°C для того, чтобы смещать взаимодействие соответствующих элементов 15A, 15B, 43A-43C третьего соединения.
В данных примерах опора 10, 10A-1°C содержит две раздельные части 11A-11C и 13A-13C, которые соединены вместе посредством обычных крепежных средств, таких как гайки и болты. две данные части продолжаются по обе стороны кольца 40, 40A-4°C и соединительной части 60, 60A-6°C в продольном направлении Z. В частности, первая из данных двух частей 11A-11C имеет поперечную торцевую поверхность 15A-15C, которая должна быть обращена к поперечной торцевой поверхности 43A-43C кольца 40, 40A-4°C для того, чтобы обеспечить дополнительное уплотнение. Вторая из данных двух частей 13A-13C содержит участок, который продолжается в поперечном направлении и который отделен вдоль продольного направления Z промежутком от поперечной торцевой поверхности 15A-15C, с кольцом 40, 40A-40C, помещенным между ними. В данных примерах данный пример второй части 13A-13C составляет несущее местоположение для первого участка смещающего элемента 50, 50A-50C, в то время, как второй участок данного элемента упруго прижимается к кольцу 40, 40A-40C.
Следует более подробное описание конкретных признаков первого варианта осуществления.
В первом варианте осуществления каждый из элементов 14A, 64A и 42A, 62A первого и второго соединений является недеформируемым (в нормальных условиях использования уплотнительной системы).
С этой целью элементы первого соединения состоят из выступов 14А, выступающих из опоры 10A (в частности из второй части 13A опоры); и из пазов 64A, которые образованы в соединительной части 60A и которые подходят для взаимодействия с выступами 14A для того, чтобы обеспечить первое кинематическое соединение, обеспечивающее возможность относительного движения соединения цилиндрического типа между опорой 10A и соединительной частью 60A относительно первого поперечного направления X (см. В частности Фигуры 4, 5 и 9B).
Тем не менее, без выхода за границы представленного описания, можно было бы предоставить по меньшей мере один из данных выступов на соединительной части и по меньшей мере один соответствующий паз в опоре.
Элементы второго соединения состоят из выступов 42А, выступающих из кольца 40A (в частности из второй кольцевой части 45A) кольца; и из пазов 62A, которые образованы в соединительной части 60A и которые подходят для взаимодействия с выступами 42A для предоставления второго кинематического соединения, обеспечивающего возможность относительного движения соединения цилиндрического типа между кольцом 40A и соединительной частью 60A относительно второго поперечного направления Y (см. В частности Фигуры 4, 5 и 9A).
Тем не менее, без выхода за границы представленного описания, можно будет предоставить по меньшей мере один из данных выступов, расположенный на соединительной части, и по меньшей мере соответствующий паз, расположенный в кольце.
Как можно ясно видеть на фигурах 4 и 5, выступы 14A разнесены вдоль первого поперечного направления X, в то время как выступы 42A разнесены вдоль второго поперечного направления Y, которое перпендикулярно первому поперечному направлению X. Аналогично, пазы 64A разнесены вдоль первого поперечного направления X, в то время как пазы 62A разнесены вдоль второго поперечного направления Y. Кольцо 40A может следовать поступательным и вращательным движениям вращающегося вала 20А в поперечной плоскости, образованной первым и вторым направлениями X и Y (см. разницу в положении кольца между Фигурами 4 и 5, когда центр 01 вращающегося вала сдвигается в данной поперечной плоскости относительно опорной точки 02 опоры 10A), учитывая формы выступов 42A, 14A и связанных с ними пазов 62A, 64A, которые могут взаимодействовать в частности посредством предоставления функциональных зазоров, которые допускают подобные поступательные и вращательные движения относительно первого и второго направлений X и Y. В отличие от этого, формы пазов 62A, 64A и выступов 42A, 14A предотвращают приведение кольца во вращение вокруг ведущей оси вращающегося вала, образованной вдоль продольного направления Z.
В данном примере пазы 62A, 64A обеспечивают возможность поступательного передвижения выступов 42A, 14A вдоль продольного направления Z, которое может облегчить сохранение взаимодействия между элементами 43A, 15A третьего соединения, обеспечивающими упомянутое выше третье кинематическое соединение.
В данном первом примере соединительная часть 60A и смещающий элемент 50A отделены друг от друга. В частности, смещающий элемент 50A имеет форму пружинящей металлической детали с формой усеченного конуса (без выхода за границы представленного описания и без ограничения также можно было бы использовать одну или более волнистых пружин или любых других упругих средств), имеющую первый концевой участок, который плотно прилегает к опоре 10A (в частности в участок второй части 13A опоры, который продолжается в поперечном направлении); и второй концевой участок, расположенный напротив первого, который плотно прилегает к кольцу 40A (в частности к торцевой поперечной поверхности второй кольцевой части 45A кольца и/или первой кольцевой части 47A).
Ниже более подробно описаны конкретные признаки второго варианта осуществления.
Во втором варианте осуществления элементы 64B первого соединения, относящиеся к соединительной части 60B, подходят для упругой деформации при сгибании, в то время как связанные с ними элементы 14B первого соединения, которые относятся к опоре 10B, являются недеформируемыми (в нормальных условиях использования уплотнительной системы).
В частности, каждый из элементов 64B первого соединения состоит из пластины, имеющей первый конец, упруго соединенный с соединительной частью 60B таким образом, чтобы пластина могла упруго поворачиваться на данном первом конце относительно соединительной части 60B вокруг оси поворота, которая является параллельной продольному направлению Z; и второй конец, расположенный напротив первого конца и от которого за пределы соединительной части 60B выступает язычок 65B, причем язычок 65B продолжается в поперечной плоскости, перпендикулярной продольному направлению Z.
Каждый из элементов 14B первого соединения состоит из паза, подходящего для взаимодействия с соответствующим язычком 65B для того, чтобы обеспечить, посредством упругой деформации пластин, первое кинематическое соединение, обеспечивающее возможность относительного движения соединения цилиндрического типа между опорой 10B и соединительной частью 60B относительно первого поперечного направления X (см. В частности Фигуры 11 и 13A). В данном примере каждый язычок 65B может скользить в связанном с ним пазу 14B вдоль продольного направления Z, таким образом облегчая поддержание взаимодействия элементов третьего соединения, обеспечивающего упомянутое выше третье кинематическое соединение.
Тем не менее, без выхода за границы представленного описания, может быть предусмотрено расположение по меньшей мере одной из пластин на опоре и по меньшей мере соответствующего паза в соединительной части.
Кроме того, во втором варианте осуществления элементы 62B второго соединения, относящиеся к соединительной части 60B, подходят для упругой деформации при сгибании, в то время как связанные с ними элементы 42B второго соединения, которые относятся к кольцу 40B, являются недеформируемыми (в нормальных условиях использования уплотнительной системы).
В частности, каждый из элементов 62B второго соединения состоит из пластины, имеющей первый конец, который упруго соединен с соединительной частью 60B таким образом, чтобы обеспечить возможность упругого поворота пластины на данном первом конце относительно соединительной части 60B вокруг оси поворота, параллельной продольному направлению Z; и второй конец, расположенный напротив первого конца, и от которого язычок 63B выступает во внутреннюю часть соединительной части 60B, при этом язычки 65B находятся в поперечной плоскости, перпендикулярной продольному направлению Z, в частности в той же самой поперечной плоскости, что и плоскость, в которой находятся язычки 65B.
Каждый из элементов 42B второго соединения состоит из паза, подходящего для взаимодействия с соответствующим язычком 63B таким образом, чтобы посредством упругой деформации пластин, создавать второе кинематическое соединение, обеспечивающее возможность относительного движения соединения цилиндрического типа между кольцом 40B и соединительной частью 60B относительно второго поперечного направления Y (см. В частности Фигуры 11 и 13B).
В данном примере каждый язычок 63B может скользить в связанном с ним пазу вдоль продольного направления Z, что может облегчать поддержание взаимодействия элементов третьего соединения, обеспечивающего упомянутое выше третье кинематическое соединение.
Тем не менее, без выхода за границы представленного описания, может быть предусмотрено расположение по меньшей мере одной из данных пластин на кольце и по меньшей мере одного соответствующего паза в соединительной части.
В данном втором варианте осуществления пластины 64B разнесены в первом поперечном направлении X (в частности они расположены под углом 180° друг относительно друга вокруг оси, продолжающейся вдоль продольного направления Z), в то же время пластины 62B разнесены вдоль второго поперечного направления Y (в частности они расположены под углом 180° друг к другу вокруг оси, продолжающейся вдоль продольного направления Z), причем данное второе поперечное направление Y перпендикулярно первому поперечному направлению X. Аналогично, пазы 14B разнесены в первом поперечном направлении X (в частности расположены под углом 180° друг относительно друга вокруг оси, направленной вдоль продольного направления Z), в то же время пазы 42B разнесены вдоль второго поперечного направления Y (в частности расположены под углом 180° друг относительно друга вокруг оси, направленной вдоль продольного направления Z). Кольцо 40B может следовать поступательным движениям (радиальным движениям) вращающегося вала 20B в поперечной плоскости, образованной первым и вторым направлениями X и Y за счет упругой деформации изгибающего типа пластин 62B и 64B относительно соединительной части 60B и опоры 10B. Кольцо 40B также может следовать вращательным движениям вращающегося вала 20B вокруг осей, образованных первым и вторым направлениями X и Y, вследствие формы язычков 63B, 65B и связанных с ними пазов 42B, 14B, которые в частности могут взаимодействовать за счет предоставления функциональных зазоров, которые обеспечивают возможность подобных вращательных движений. В отличие от этого, формы пазов 14B, 42B и пластин 64B, 62B (и в частности их язычков 65B, 63B) предотвращают приведение кольца во вращение вокруг ведущей оси вращающегося вала, образованной вдоль продольного направления Z.
В данном втором варианте осуществления соединительная часть 60B и смещающий элемент 50B связаны друг с другом. В частности, смещающим элементом 50B является аналог смещающего элемента описанного выше первого варианта осуществления (см. В частности Фигуры 13A-13C). Вследствие этого, он не описан повторно для второго варианта осуществления по причине краткости представленного описания.
Ниже конкретные признаки третьего варианта осуществления описаны более подробно.
В третьем варианте осуществления (см. Фигуры 14 и 15) элементы 64C первого соединения, относящиеся к соединительной части 60C, подходят для упругой деформации при сгибании, в то же время связанные с ними элементы первого соединения 14C, которые относятся к опоре 10C, являются недеформируемыми (в нормальных условиях использования уплотнительной системы).
В частности, каждый из элементов 64C первого соединения состоит из пластины, имеющей первый конец, упруго соединенный с соединительной частью 6°C таким образом, чтобы пластина могла упруго поворачиваться на данном первом конце относительно соединительной части 6°C вокруг оси поворота, перпендикулярной продольному направлению Z; и второй конец, расположенный напротив первого конца и от которого в сторону от соединительной части 6°C и в сторону от кольца 4°C выступает язычок 65C, при этом язычок 65C находится в плоскости, которая является параллельной продольному направлению и параллельной первому направлению X.
Каждый из элементов 14C первого соединения состоит из паза, подходящего для взаимодействия с соответствующим язычком 65C с целью предоставления первого кинематического соединения, в данном примере посредством упругой деформации пластин и посредством зазора, который существует между язычком 65C и пазом 14C, обеспечивая возможность поступательного передвижения или поворота язычка 65C и паза 14C друг относительно друга и относительно первого поперечного направления X, при этом первое кинематическое соединение таким образом обеспечивает возможность относительного движения соединения цилиндрического типа между опорой 1°C и соединительной частью 6°C относительно первого поперечного направления X.
В данном примере, каждый язычок 64C может скользить в связанном с ним пазу в продольном направлении Z, что может облегчать поддержание взаимодействия элементов третьего соединения, обеспечивающего упомянутое выше третье кинематическое соединение.
Тем не менее, без выхода за границы представленного описания, может быть предусмотрено расположение по меньшей мере одной из данных пластин на опоре и по меньшей мере соответствующего паза в соединительной части.
Кроме того, в третьем варианте осуществления элементы 62C второго соединения, относящиеся к соединительной части 60C, подходят для упругой деформации при сгибании, в то же время связанные с ними элементы 42C второго соединения, которые относятся к кольцу 40C, являются недеформируемыми (в нормальных условиях использования уплотнительной системы).
В частности, каждый из элементов 62C второго соединения состоит из пластины, имеющей первый конец, упруго соединенный с соединительной частью 6°C таким образом, чтобы пластина могла упруго поворачиваться на данном первом конце относительно соединительной части 6°C вокруг оси поворота, перпендикулярной продольному направлению Z; и второй конец, расположенный напротив первого конца и от которого в сторону от соединительной части 60B и в направлении кольца 4°C выступает язычок 63C, причем язычок 63C находится в плоскости, которая является параллельной продольному направлению Z и параллельной второму поперечному направлению Y.
Каждый из элементов 42C второго соединения состоит из паза, подходящего для взаимодействия с соответствующим язычком 63C для того, чтобы обеспечить второе кинематическое соединение, в данном примере посредством упругой деформации пластин и посредством зазора, существующего между язычком 63C и пазом 42C, обеспечивая возможность поступательного передвижения и поворота язычка 63C и паза 42C друг относительно друга и относительно второго поперечного направления, причем данное второе кинематическое соединение допускает относительное движение соединения цилиндрического типа между кольцом 4°C и соединительной частью 6°C относительно второго поперечного направления Y.
В данном варианте осуществления каждый язычок 62C может скользить в связанном с ним пазу вдоль продольного направления Z, облегчая таким образом поддержание взаимодействия между элементами третьего соединения, обеспечивающего упомянутое выше третье кинематическое соединение.
Тем не менее, без выхода за границы представленного описания, может быть предусмотрено расположение по меньшей мере одной из пластин на кольце и по меньшей мере соответствующего паза в соединительной части.
В данном третьем варианте осуществления пластины 64C разнесены вдоль первого поперечного направления X (в частности расположены под углом 180° друг относительно друга вокруг оси, направленной вдоль продольного направления Z), в то же время пластины 62C разнесены вдоль второго поперечного направления Y (в частности расположены под углом 180° друг относительно друга вокруг оси, направленной вдоль продольного направления Z), причем данное второе поперечное направление Y перпендикулярно первому поперечному направлению X. Аналогично, пазы 14C разнесены вдоль первого поперечного направления X (в частности расположены под углом 180° друг относительно друга вокруг оси, направленной вдоль продольного направления Z), в то же время пазы 42C разнесены вдоль второго поперечного направления Y (в частности расположены под углом 180° друг относительно друга вокруг оси, направленной вдоль продольного направления Z). Кольцо 4°C может следовать вращательным движениям вращающегося вала 2°C вокруг первого и второго направлений X и Y за счет упругой деформации изгибающего типа язычков 62C и 64C относительно соединительной части 6°C и опоры 10C. Кольцо 4°C также может следовать поступательным движениям (радиальным движениям) вращающегося вала 2°C вдоль первого и второго направлений X и Y вследствие формы язычков 63C, 65C и связанных с ними пазов 42C, 14C, которые в частности могут взаимодействовать за счет предоставления функциональных зазоров, которые обеспечивают возможность подобного поступательного движения. В отличие от этого, формы пазов 14C, 42C и пластин 64C, 62C (и в частности их язычков 65C, 63C) предотвращают приведение кольца во вращение вокруг ведущей оси вращающегося вала, образованной вдоль продольного направления Z.
В данном третьем варианте осуществления соединительная часть 6°C и смещающий элемент образованы в виде единого блока. В частности, смещающий элемент состоит из упругих пластин 62C, 64C. В частности, смещающий элемент содержит первый концевой участок, который образован пластинами 64C и который входит в плотное соприкосновение с опорой 1°C (в частности, с участком второй части 13C опоры, который продолжается в поперечном направлении) посредством язычков 65C данных пластин 64C, которые выступают от кольца 4°C (в частности, в направлении второй части 13C); и второй концевой участок, расположенный напротив первого, который образован пластинами 62C и который входит в плотное соприкосновение с кольцом 4°C (в частности, со второй кольцевой частью 45C кольца) посредством язычков 63C и пластин 62C, которые выступают в направлении кольца 40C.
Варианты осуществления или варианты воплощения, описанные в представленном описании, приведены в качестве неограничивающей иллюстрации, и в свете данного описания квалифицированный специалист в данной области может легко модифицировать данные варианты осуществления или варианты воплощения или предусмотреть другие, оставаясь в то же время в пределах границ изобретения.
Кроме того, различные характеристики данных вариантов осуществления или вариантов воплощения могут быть использованы отдельно или могут быть объединены друг с другом. Когда они объединены, данные характеристики могут быть объединены, как описано выше или другими способами, причем изобретение не ограничено конкретными комбинациями, описанными в представленном описании. В частности, если не оговорено иное, любая характеристика, описанная со ссылкой на любой из вариантов осуществления или вариантов воплощения, может быть аналогичным образом приложена к любому другому варианту осуществления или варианту воплощения.
Изобретение относится к уплотнительной системе по меньшей мере для одного установленного в плавающем состоянии кольца (40, 40A-40C) в опоре (10, 10A-10C) для вращающегося вала (20, 20A-20C), способного вращаться вокруг оси, направленной вдоль продольного направления (Z), для того, чтобы обеспечить динамическое уплотнение между валом (20, 20A-20C) и опорой (10, 10A-10C). Система содержит соединительную часть (60, 60A-60C), помещенную между кольцом (40, 40A-40C) и опорой (10, 10A-10C), посредством которой кольцо (40, 40A-40C) прикрепляют к опоре (10, 10A-10C). Первое соединение цилиндрического типа, направленное относительно первого поперечного направления, обеспечивает соединение между опорой (10, 10A-10C) и соединительной частью (60, 60A-60C). Второе соединение цилиндрического типа, направленное относительно второго поперечного направления, перпендикулярного первому поперечному направлению, обеспечивает соединение между кольцом (40, 40A-40C) и соединительной частью (60, 60A-60C). Изобретение также предоставляет турбонасос, содержащий подобные вращающиеся валы (20, 20A-20C) и уплотнительные системы. 2 н. и 8 з.п. ф-лы, 19 ил.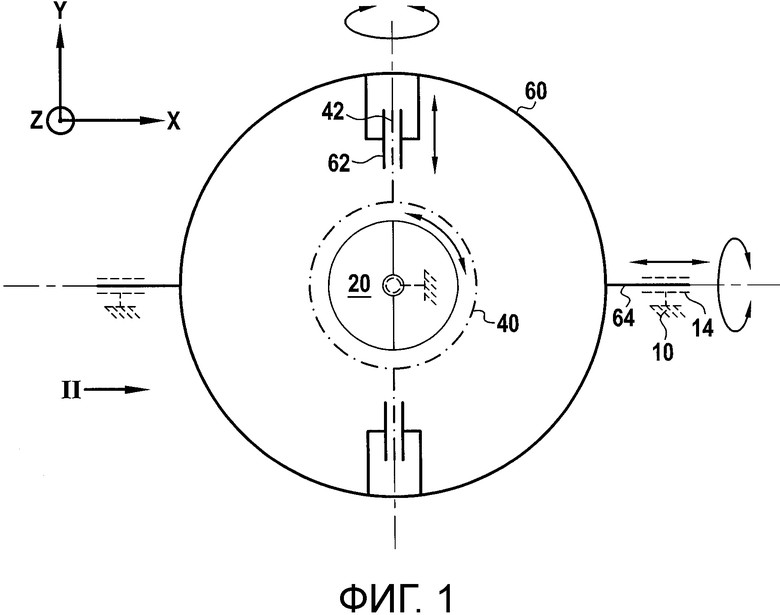
1. Уплотнительная система по меньшей мере для одного кольца (40, 40A-40C) с плавающей установкой в опоре (10, 10A-10C) для поворотного вала (20, 20A-20C), способного вращаться вокруг оси, проходящей в продольном направлении (Z), для того, чтобы обеспечить динамическое уплотнение между валом (20, 20A-20C) и опорой (10, 10A-10C), при этом система отличается тем, что:
она содержит соединительную деталь (60, 60A-60C), помещенную между кольцом (40, 40A-40C) и опорой (10, 10A-10C), посредством которой кольцо (40, 40A-40C) прикрепляют к опоре (10, 10A-10C);
опора (10, 10A-10C) и соединительная деталь (60, 60A-60C) содержат соответствующие первые соединительные элементы (14, 14A-14C, 64, 64A-64C), выполненные с возможностью взаимодействия с обеспечением первого кинематического соединения, обеспечивающего возможность относительного перемещения по типу цилиндрического шарнира между опорой (10, 10A-10C) и соединительной деталью (60, 60A-60C) в первом поперечном направлении (X); и
кольцо (40, 40A-40C) и соединительная деталь (60, 60A-60C) содержат соответствующие вторые соединительные элементы (42, 42A-42C, 62, 62A-62C), выполненные с возможностью взаимодействия с обеспечением второго кинематического соединения, обеспечивающего возможность относительного перемещения по типу цилиндрического шарнира между кольцом (40, 40A-40C) и соединительной деталью (60, 60A-60C) во втором поперечном направлении (Y), перпендикулярном первому поперечному направлению (X).
2. Система по п. 1, в которой каждый из первых и/или каждый из вторых соединительных элементов (14A, 64A и/или 42A, 62A) является недеформируемым.
3. Система по п. 1, в которой по меньшей мере один из первых и/или вторых соединительных элементов (14B, 14C, 64B, 64C и/или 42B, 42C, 62B, 62C) выполнен с возможностью упругой деформации при сгибании.
4. Система по п. 1, в которой по меньшей мере один из первых и/или вторых соединительных элементов (14C, 64C и/или 42C, 62C) выполнен с возможностью упругой деформации при скручивании.
5. Система по п. 1, в которой опора (10, 10A-10C) и кольцо (40, 40A-40C) содержат соответствующие третьи соединительные элементы (15A, 14B, 43A-43C), выполненные с возможностью взаимодействия с обеспечением третьего кинематического соединения, обеспечивающего возможность относительного перемещения по плоскому упору между опорой (10, 10A-10C) и кольцом (40, 40A-40C) в поперечной плоскости.
6. Система по п. 5, содержащая смещающий элемент (50, 50A, 50B), выполненный с возможностью взаимодействия с опорой (10, 10A-10C) и кольцом (40, 40A-40C) для смещения соответствующих третьих соединительных элементов (15A, 15B, 43A-43C) во взаимодействие.
7. Система по п. 6, в которой соединительная деталь (60A, 60B) и смещающий элемент (50A, 50B) отделены друг от друга.
8. Система по п. 6, в которой соединительная деталь (60C) и смещающий элемент образованы в виде единой детали.
9. Система по п. 6, в которой поперечная плоскость и смещающий элемент (50A, 50B) расположены продольно по обе стороны кольца (40A, 40B).
10. Турбонасос, содержащий поворотный вал (20, 20A-20C) и уплотнительную систему по любому одному из пп. 1-9.
| DE 10217181 A1, 13.11.2003 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ гирокомпасирования с применением датчика угловой скорости | 2018 |
|
RU2698567C1 |
| RU 2013113720 A, 10.10.2014 | |||
| ТУРБОНАСОСНЫЙ АГРЕГАТ | 2007 |
|
RU2341689C2 |

