Изобретение относится к области кораблестроения, а именно к кораблям, назначением которых является обнаружение подводных объектов, в частности подводных лодок, то есть освещение подводной обстановки.
Как известно, наиболее эффективным средством поиска и обнаружения подводных объектов является гидроакустическая аппаратура.
В качестве прототипа выберем противолодочный корабль, оснащенный гидроакустической станцией с подкильной антенной и предназначенный для поиска подводной лодки (ПЛ) в заданном районе самостоятельно либо в составе группы противолодочных кораблей [1, 2].
Недостатком прототипа является ограниченная дальность обнаружения ПЛ ввиду высокого уровня ходовых акустических помех и использования моностатического режима гидролокации, то есть совмещения излучающей и приемной антенн, ввиду чего зондирующий сигнал (ЗС) существенно ослабляется, проходя расстояние до цели и обратно. Кроме того, учитывая, что ПЛ обнаруживает шум и сигналы гидролокатора надводного корабля на расстоянии, существенно превышающем дальность ее обнаружения тем же гидролокатором, и тем самым контролирует его текущее местоположение, она имеет возможность эффективно уклоняться от обнаружения. В результате обнаружение ПЛ противолодочным кораблем, оснащенным гидроакустической станцией с подкильной антенной, недостаточно эффективно.
Решаемая техническая проблема - повышение эффективности освещения подводной обстановки в назначенном районе.
Достигаемый технический результат - увеличение площади обследуемого района.
Указанный технический результат достигается тем, что надводный корабль (далее корабль освещения подводной обстановки или сокращенно корабль ОПО) оборудуется гидроакустическими и иными средствами, позволяющими создать в назначенном районе мультистатическую систему гидролокации [3, 4] с разнесенными в пространстве излучателем и приемниками и тем самым существенно повысить освещаемую площадь. Эти средства включают:
- Комплект пассивных автономных гидроакустических станций (далее - АГС), оборудованных всенаправленной приемной гидроакустической антенной (далее - антенна АГС), блоком контроля ориентации антенны в пространстве, блоком обработки сигналов с выхода гидроакустической антенны (далее - блок обработки), аппаратурой передачи сообщений об обнаружении подводного объекта заданного класса, источником электропитания, якорем с якорь-тросом. В качестве аппаратуры передачи сообщения об обнаружении подводного объекта заданного класса может использоваться радиопередатчик с всплывающей на время передачи сообщения радио- либо спутниковой антенной или станция звукоподводной связи.
- Гидроакустический излучатель (далее - излучатель) с гидроакустической антенной (далее - антенна излучателя), опускаемой под воду на заданную глубину с борта корабля ОПО, лежащего в дрейфе.
- Корабельные средства измерения характеристик гидроакустических условий в районе плавания (глубины района, вертикального распределения скорости звука, волнения поверхности моря).
- Корабельная радиоприемная аппаратура и аппаратура гидроакустической связи для приема сообщений от АГС.
- Корабельная ЭВМ со специальной программой, позволяющей до начала работы рассчитывать необходимое количество и координаты (позиции) АГС, а также траекторию маневрирования корабля в процессе расстановки АГС, а в процессе работы определять траектории обнаруженных подводных объектов и с их использованием повышать достоверность их классификации и точность определения координат и параметров их движения.
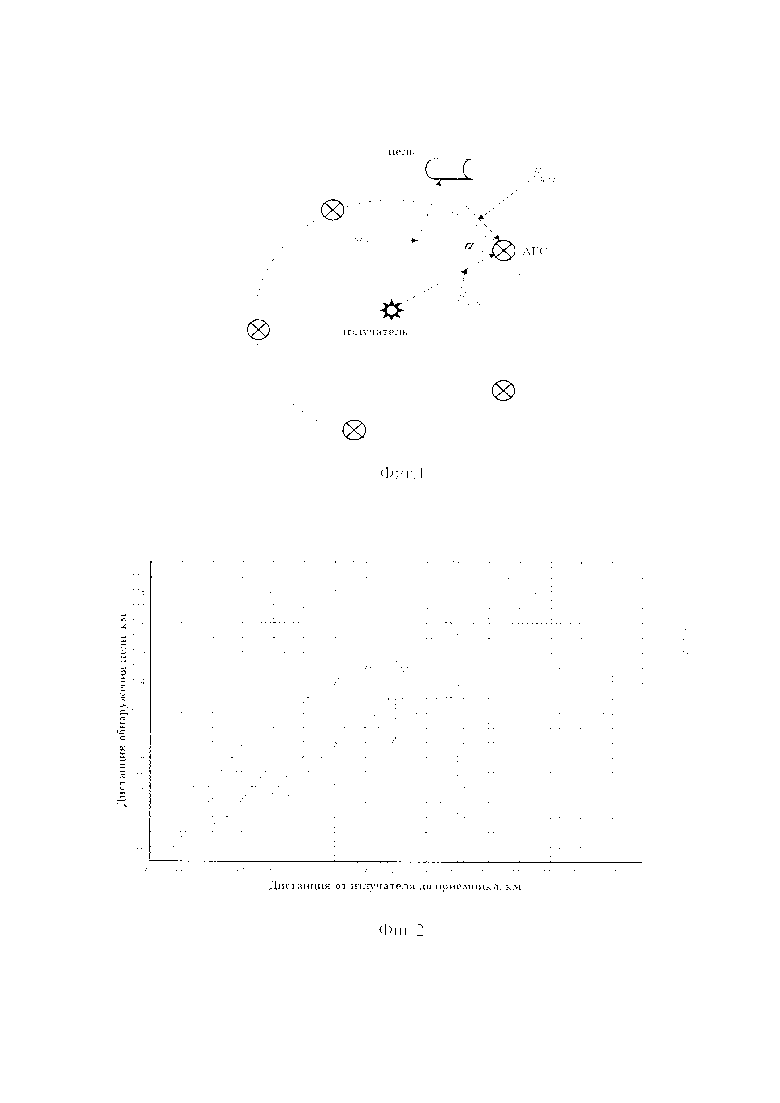
Геометрия мультистатической системы изображена на фиг. 1, где в центре окружности находится корабль ОПО с опущенной в воду гидроакустической антенной излучателя, а по окружности расположены пять АГС (приемников). На фиг. 1 обозначены:
-  - расстояние между излучателем и целью;
- расстояние между излучателем и целью;
-  - расстояние между целью и ближайшей АГС;
- расстояние между целью и ближайшей АГС;
-  - расстояние между излучателем и АГС;
- расстояние между излучателем и АГС;
- α - угол с вершиной в месте расположения АГС между отрезками  , равный разности направлений прихода ЗС и эхосигнала (ЭС).
, равный разности направлений прихода ЗС и эхосигнала (ЭС).
Реализация изобретения осуществляется следующим образом. Придя в назначенный район, на корабле ОПО при помощи корабельных средств измеряют характеристики гидроакустических условий в районе (глубину района, вертикальное распределение скорости звука, волнение поверхности моря) и с учетом результатов измерений по специальной программе в корабельной ЭВМ рассчитывают оптимальные по критерию освещения максимальной площади района: заглубление гидроакустической антенны излучателя; глубины установки АГС; необходимое количество АГС, подлежащих установке, и их координаты относительно корабля ОПО. Затем корабль ОПО осуществляет скрытную постановку АГС на рассчитанные позиции и глубину. Для этого он начинает маневрирование в районе по рассчитанной на ЭВМ сложной траектории, дезинформирующей средства воздушного и космического наблюдения противника об истинных целях маневрирования, но при этом проходящей через все рассчитанные позиции АГС. При прибытии в очередную точку постановки АГС через специальный люк в днище корабля под воду опускается АГС с якорем на якорь-тросе, якорь ложится на дно и тем самым фиксирует положение АГС в пространстве, которое запоминается в корабельной ЭВМ. При покладке якоря на дно якорь-трос АГС разматывается на такую длину, которая обеспечивает заглубление антенны АГС на предварительно рассчитанную оптимальную глубину.
После завершения постановки всех АГС корабль ОПО занимает заранее рассчитанную позицию в центре района (на якоре либо в дрейфе), с борта на заранее рассчитанную глубину опускается антенна излучателя и начинается излучение по заранее сформированной программе. Программа излучения включает: тип ЗС; давление ЗС на оси характеристики направленности антенны излучателя; период следования ЗС; сектор излучения в горизонтальной и вертикальной плоскостях.
Функционирование каждой АГС состоит в обнаружении и измерении параметров ЗС и ЭС, отраженных от неподвижных и подвижных подводных и надводных объектов. Путем обработки результатов измерений в блоке обработки АГС осуществляется классификация объекта, от которого отразился ЭС, и определяются его координаты (пеленг и дистанция относительно АГС) [2]. Если класс обнаруженного объекта соответствует классу объектов, подлежащих обнаружению, формируется сообщение об обнаружении объекта заданного класса и его координатах, которое передается на корабль ОПО одним из возможных способов (например, по гидроакустическому каналу, радиоканалу, спутниковому каналу).
Определение полярных координат обнаруженной цели в блоке обработки АГС осуществляется следующим образом:
- пеленг цели определяется как пеленг обнаружения ЭС;
- расстояние до цели  определяется как решение системы двух уравнений с двумя неизвестными (
определяется как решение системы двух уравнений с двумя неизвестными ( ):
):

где
ΔT - разность времен обнаружения ЭС и ЗС,
с - скорость звука в воде.
Решение системы (1) дает:

На корабле ОПО по полученным сообщениям от АГС, обнаруживших цель, вычисляются траектории подводных объектов, с использованием которых определяются координаты и параметры движения объектов.
Приведем результаты расчетов, подтверждающие достижение технического результата изобретения.
Рассмотрим условия сплошной акустической освещенности в мелком море (средняя глубина моря 250 м).
Для определения оптимального расстояния между кораблем ОПО и АГС (т.е. оптимального радиуса окружности на фиг. 1, по которой расставлены АГС) на фиг. 2 приведены зависимости дистанции обнаружения ПЛ (относительно корабля ОПО) от расстояния между кораблем ОПО и АГС, посчитанные для оптимальных заглублений антенн излучателя и АГС и трех глубин погружения ПЛ - 50, 100 и 150 м. Из рассмотрения этих графиков следует, что с увеличением расстояния между излучателем и приемником (т.е. между кораблем ОПО и АГС) дальность обнаружения ПЛ (относительно корабля ОПО) монотонно возрастает до некоторого предела, зависящего от глубины погружения ПЛ, а затем резко падает до нуля. Учитывая это, расстояние между кораблем ОПО и АГС, на которой дальность обнаружения ПЛ максимальна для наиболее неблагоприятной глубины (50 м) можно принять за оптимальный радиус окружности с центром в месте расположения корабля ОПО, на которой следует расположить АГС. Этот радиус согласно фиг. 2 составляет  При этом радиусе окружности обнаружение ПЛ (относительно корабля ОПО) в зависимости от глубины ПЛ будет лежать в интервале 102-112 км. Для обеспечения сплошной зоны обнаружения ПЛ в круге радиусом 102 км расстояние между соседними АГС должно составлять не более 52 км. Для этого потребуется установка 13 АГС.
При этом радиусе окружности обнаружение ПЛ (относительно корабля ОПО) в зависимости от глубины ПЛ будет лежать в интервале 102-112 км. Для обеспечения сплошной зоны обнаружения ПЛ в круге радиусом 102 км расстояние между соседними АГС должно составлять не более 52 км. Для этого потребуется установка 13 АГС.
То есть можно констатировать, что в рассматриваемых условиях корабль ОПО позволяет одновременно освещать подводную обстановку в районе площадью π×1022≈33 тыс.км2. Для существующих противолодочных надводных кораблей этот параметр не превышает 1 тыс.км2.
Таким образом, технический результат изобретения достигается.
Источники информации:
1. Родионов Б.И. Противолодочные силы и средства флотов // М.: Воениздат, 1977.
2. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы // СПб.: Наука, 2004.
3. Машошин А.И. Использование внешнего источника подсветки для повышения дальности обнаружения малошумных целей // Морская радиоэлектроника, 2014, №2 (48), с. 12-15.
4. Машошин А.И., Шафранюк А.В. Алгоритмы управления распределенной системой подводного наблюдения // Морские информационно-управляющие системы, 2016, №2 (10), с. 12-19.
| название | год | авторы | номер документа |
|---|---|---|---|
| Корабль освещения подводной обстановки | 2022 |
|
RU2803404C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| Способ определения координат и параметров движения подводных объектов при мультистатической гидролокации | 2024 |
|
RU2830066C1 |
| Мультистатическая система подводного наблюдения | 2019 |
|
RU2713005C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2681476C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ЦЕЛЕЙ | 2013 |
|
RU2554640C2 |
| АВИАЦИОННЫЙ ПЛАВАЮЩИЙ ПОДВОДНЫЙ СНАРЯД | 2020 |
|
RU2753986C1 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ СРЕДЫ РЕАКТИВНЫМ СНАРЯДОМ СО ВЗРЫВНЫМ ИСТОЧНИКОМ ЗВУКА (ВАРИАНТЫ) | 2009 |
|
RU2397916C1 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2018 |
|
RU2735447C2 |
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
Изобретение относится к области кораблестроения, а именно к кораблям, назначением которых является обнаружение подводных объектов. Корабль освещения подводной обстановки оснащен гидроакустическим излучателем с гидроакустической антенной, опускаемой под воду на заданную глубину, комплектом пассивных автономных гидроакустических станций (АГС), способных обнаруживать зондирующие сигналы гидроакустического излучателя и эхосигналы, отраженные от подводных объектов, средствами измерения характеристик гидроакустических условий в районе плавания, радиоприемной аппаратурой и аппаратурой гидроакустической связи для приема сообщений от АГС, ЭВМ со специальной программой, позволяющей до начала работы рассчитывать необходимое количество, координаты скрытно устанавливаемых АГС, траекторию маневрирования корабля в процессе расстановки АГС, проходящую через все рассчитанные позиции АГС, оптимальные для текущих гидроакустических условий глубины установки антенны излучателя и АГС, а в процессе работы вычислять траектории обнаруженных подводных объектов и определять их координаты и параметры движения. Достигается увеличение площади обследуемого района. 3 з.п. ф-лы, 2 ил.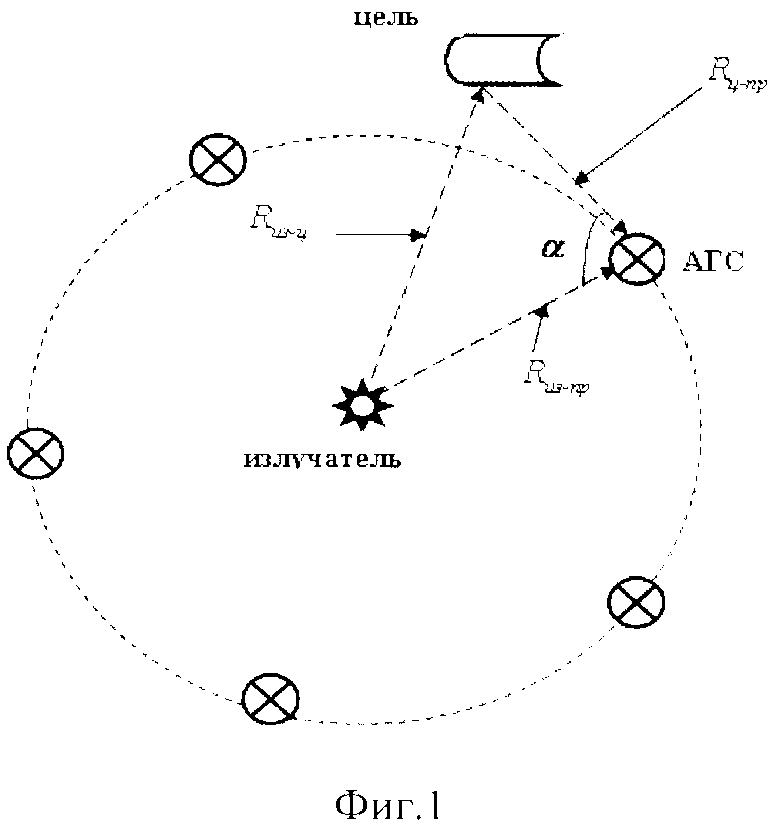
1. Корабль освещения подводной обстановки, отличающийся тем, что для освещения подводной обстановки он оснащен гидроакустическим излучателем с гидроакустической антенной, опускаемой под воду на заданную глубину, комплектом пассивных автономных гидроакустических станций (АГС), способных обнаруживать зондирующие сигналы гидроакустического излучателя и эхосигналы, отраженные от подводных объектов, средствами измерения характеристик гидроакустических условий в районе плавания, радиоприемной аппаратурой и аппаратурой гидроакустической связи для приема сообщений от АГС, ЭВМ со специальной программой, позволяющей до начала работы рассчитывать необходимое количество, координаты скрытно устанавливаемых АГС, траекторию маневрирования корабля в процессе расстановки АГС, проходящую через все рассчитанные позиции АГС, оптимальные для текущих гидроакустических условий глубины установки антенны излучателя и АГС, а в процессе работы вычислять траектории обнаруженных подводных объектов и определять их координаты и параметры движения.
2. Корабль освещения подводной обстановки по п.1, отличающийся тем, что в его конструкции предусмотрен специальный люк, обеспечивающий скрытную постановку АГС.
3. Корабль освещения подводной обстановки по п.1, отличающийся тем, что каждая АГС включает всенаправленную приемную гидроакустическую антенну, блок контроля ориентации антенны в пространстве, блок обработки сигналов с выхода гидроакустической антенны, аппаратуру передачи сообщений об обнаружении подводного объекта заданного класса, источник электропитания, якорь с якорь-тросом.
4. Корабль освещения подводной обстановки по п.3, отличающийся тем, что в качестве аппаратуры передачи сообщения об обнаружении подводного объекта заданного класса может использоваться радиопередатчик с всплывающей на время передачи сообщения радио- либо спутниковой антенной или станция звукоподводной связи.
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| Стенд для исследования взаимодействия подвижного состава и пути в горизонтальной плоскости | 1957 |
|
SU114170A1 |
| СПОСОБ КОМПЛЕКСНОГО ОСВЕЩЕНИЯ ВНЕШНЕЙ (ПОДВОДНОЙ) ОБСТАНОВКИ ОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2005 |
|
RU2314229C2 |
| US 2015124565 A1, 07.05.2015. | |||

