Изобретение относится к системам автоматического управления рабочими органами сельскохозяйственных машин и может быть использовано для выкопки растений в садовых и лесопитомниках, садах.
В сельскохозяйственном производстве существует ряд операций, таких как обработка междурядий в садах, посадка и выкопка саженцев плодовых растений и кустов ягод, которые требуют позиционирования рабочих органов машин и оборудования относительно местоположения штамбов растений, корневой системы, ветвей и т.д. В связи с этим возникает задача определения координат местоположения как самого растения, так и рабочего органа. Сами по себе растения, не несут такого сигнала, который мог бы быть зафиксирован современными приборами.
Известны устройства для позиционирования рабочего органа при выкопки растений и других операций при работе оборудования с почвой, состоящие из датчиков местоположения растения или его части и самого рабочего органа.
В машине для отделения отводков вегетативно размножаемых подвоев [1], содержащей раму с опорно-регулировочными колесами, смонтированными на ней валом с наклонной осью вращения и закрепленными на нем посредством ступицы режущим диском и лопастями над ним, привод и лифтеры, позиционирование рабочего органа - режущего диска по высоте обеспечивается путем подъема или опускания опорно-регулировочных колес. Такой способ не обеспечивает необходимого качества позиционирования в зависимости от неровностей почв.
В машине для обработки межствольных полос в саду [2], содержащей раму с опорным колесом и навесным устройством, в которой имеется механизм управления поворотом на 180° при обходе секцией штамба дерева, выполненный в виде щупа и фиксирующего устройства механизма управления поворотом секции в виде жестко закрепленной на раме секции втулки, в которой подвижно с помощью пружины установлен связанный со щупом палец, и двух упоров, расположенных на противоположных концах корпуса редуктора. Недостатком данного устройства позиционирования рабочего органа является дополнительное повреждение штамбов деревьев.
В Копирующем устройстве срезающего аппарата капустоуборочной машины, содержащее копирующие лыжи, механизм навески с уравновешивающей пружиной, связанная одним концом со стойкой нижнего звена навески, кинематически соединена с другим концом с помощью гибкого каната, а верхнее звено навески выполнено упругим в виде одновинтового талрепа с подпружиненным штоком [3]. Постоянство высоты расположения зоны резания рабочим органом достигается, за счет постоянства давления под копирующими лыжами. Однако, подобными устройствами высота позиционирования рабочего органа осуществляется только относительно профиля поверхности земли и над ней.
В устройстве автоматического контроля заданной глубины обработки почвы содержится датчик первичной информации с двумя чувствительными элементами, один из которых - переменный конденсатор, другой -переменный резистор. Оба чувствительных элемента, соединены соответствующими элементами почвообрабатывающей машины, не имеют непосредственной связи с почвой и растением, а потому не могут качественно позиционировать рабочий орган [4].
Известен широкий круг устройств для ориентации транспортных средств в электромагнитном поле токонесущего проводника, включающие замкнутую рамку по краям трассы, содержащие индукционные измерительные преобразователи, схемы сравнения [5, 6].
В настоящее время существуют различные бесконтактные оптические способы измерения расстояния рабочего органа до поверхности почвы. Эффективность этого способа в полевых условиях значительно снижается по причине низкой помехозащищенности (повышенной влажности, пыли, вибрации, наличие инородных предметов).
Известно устройство для бесконтактного измерения расстояния до объекта установлено на ботвоудалительной машине, соединенное с электрогидравлической системой управления задним навесным устройством трактора [7]. Копирование рельефа почвы реализуется посредством коррекции положения нижних тяг заднего навесного устройства путем применения электрогидравлической системы, управляемой оптической фокусирующей системой.
Недостатками известных устройств для позиционирования рабочих органов при выкопке растений является то, что они могут качественно работать только выше поверхности почвы и при идеальном рельефе почвы. При этом у известных устройств отсутствует информационная связь с растением или его элементами, что приводит к некачественному выполнению технологического процесса, например при выкопке саженцев плодовых растений.
Сущность изобретения заключается в том, что выкопочная машина, которая содержит рабочий орган с приводом, усилитель привода рабочего органа, устройство управления, датчики для определения местоположения рабочего органа, блок энергопитания, отличающееся тем, что с целью автоматизации процесса и повышения точности определения местоположения рабочего органа относительно растения, последнее содержит прикрепленную к ней металлическую базовую метку, а привод рабочего орган содержит координатор с приводами горизонтального и вертикального перемещения и расположенным на его оси излучателем электромагнитных колебаний, трех датчика электромагнитных колебаний, соединенных с устройством управления, выходы которого соединены через усилители с приводами горизонтального и вертикального перемещения координатора рабочего органа.
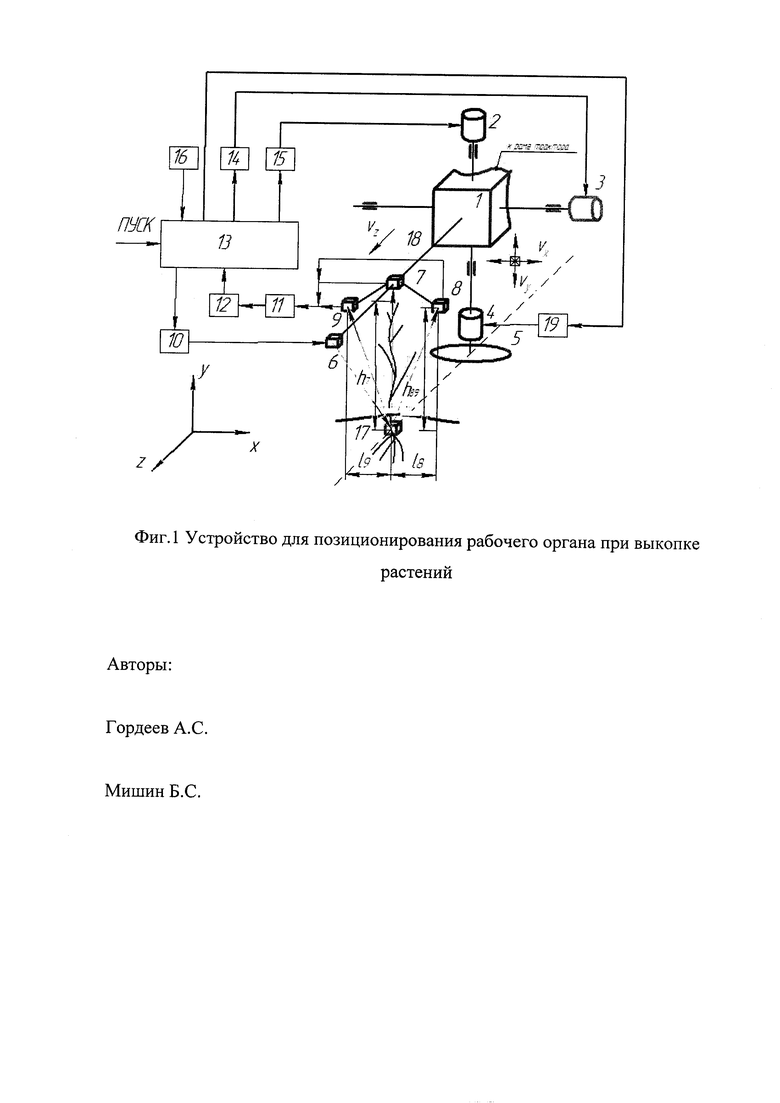
На фиг. 1 представлена схема устройства позиционирования рабочего органа выкопочной машины относительно корневой системы растения. Устройство состоит: из координатора 1, содержащего ось 18, управляемого электродвигателями вертикального перемещения 2 и горизонтального перемещения 3, снизу которого крепится привод 4 рабочего органа 5; излучателя 6 и датчиков электромагнитной энергии 7, 8, 9, соединенных с координатором 1; генератора электромагнитной энергии 10, усилителей 11, пиковых детекторов 12, устройства управления 13, усилителей приводов 14, 15, блока питания 16. Датчик 7 и излучатель 6 находятся на оси 18, а датчики 8, 9 - ниже и симметрично по бокам оси 18. Излучатель 6 соединен с выходом генератора электромагнитной энергии 10 с определенной частотой. Датчики 7, 8, 9 соединены со входами усилителей 11, выходы которых соединены со входами пиковых детекторов 12, соединенных в свою очередь со входами контроллера 13. Выходы контроллера соединены с усилителями 14, 15, 19, которые соединены соответственно своими выходами с приводами 2, 3, 4. Базовая метка 17 в виде металлического кольца крепится на каждое растение, например на корневую шейку или маточную косичку, перед посадкой и постоянно находится на нем. В качестве метки также может использоваться металлический провод, проложенный вдоль ряда растений.
Рабочий орган 5 вращается приводом 4 и в процессе работы находится относительно метки 17 на определенном расстоянии h. Координатор 1 перемещается вместе ось 18 и рабочий орган 5 в плоскости XY, обеспечивая тем самым перемещение последнего в этой плоскости в горизонтальном vx (перпендикулярно оси движения вправо-влево) и вертикальном vy (верх-низ) направлениях. Перемещение vy осуществляется приводом 2, а перемещение vx - приводом 3. Блок питания 16 обеспечивает данное устройство энергией. Все устройство навешивается на трактор и перемещается вдоль ряда растений по оси Z.
На фиг. 1 обозначено: h89 - расстояние от датчиков 8, 9 по оси Y от метки 17, h7 - расстояние датчика 7 по оси Y от метки 17, l9 - расстояние от датчика 9 до метки 17 по оси X, l8 - расстояние от датчика 8 до метки l7 по оси X, h890 - оптимальное расстояние от датчиков 8, 9 по оси Y до метки 17, h70 - оптимальное расстояние от датчика 7 по оси Y до метки 17.
Работа устройства. Устройство запускается в работу по команде ПУСК на входе устройства управления 13 после выхода трактора на ряд растений. Местоположение датчиков 7, 8, 9 относительно метки 17, находящиеся в этот момент в зоне действия этих датчиков меняется в процессе перемещения трактора в направлении vz. Возможны несколько вариантов поведения устройства, в зависимости от местоположения датчиков 7, 8, 9 относительно метки 17. После пуска устройства генератор 10 подает сигнал на излучатель 6, который подает электромагнитную волну в пространство, в зоне которого находится также и метка 17. В метке 17 возникают электрические токи, которые генерируют электромагнитную волну, воспринимаемую датчиками 7, 8, 9 Величина сигналов датчиков зависит от расстояния каждого датчика до метки.
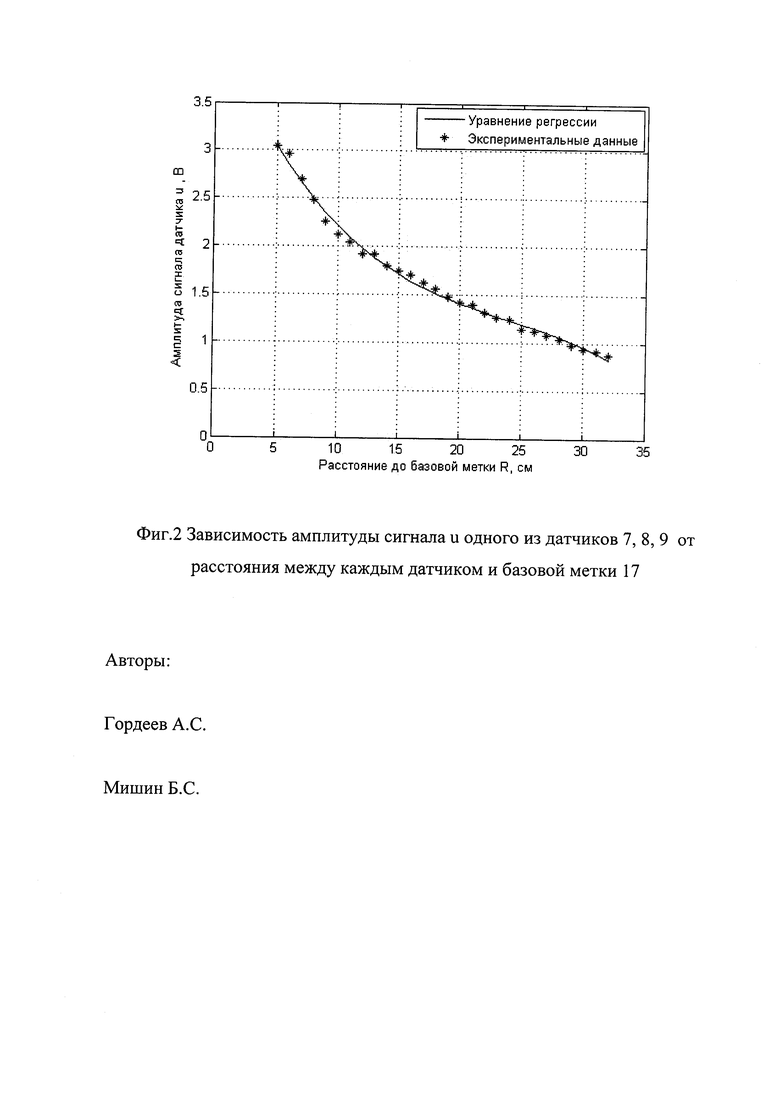
На фиг. 2 приведена зависимость амплитуды сигнала и одного из датчиков 7, 8, 9 от расстояния между каждым датчиком и базовой метки 17, выражаемая регрессионным уравнением yR=-0,55u∧3+8.78u∧2-39.5u+60.
Рабочий орган должен находиться на определенном расстоянии от метки. Устройство для позиционирования рабочего органа при выкопке растений с помощью устройства управления 13 управляет приводами 2,3 таким образом, чтобы это расстояние стремилось к заданному h890, h70.
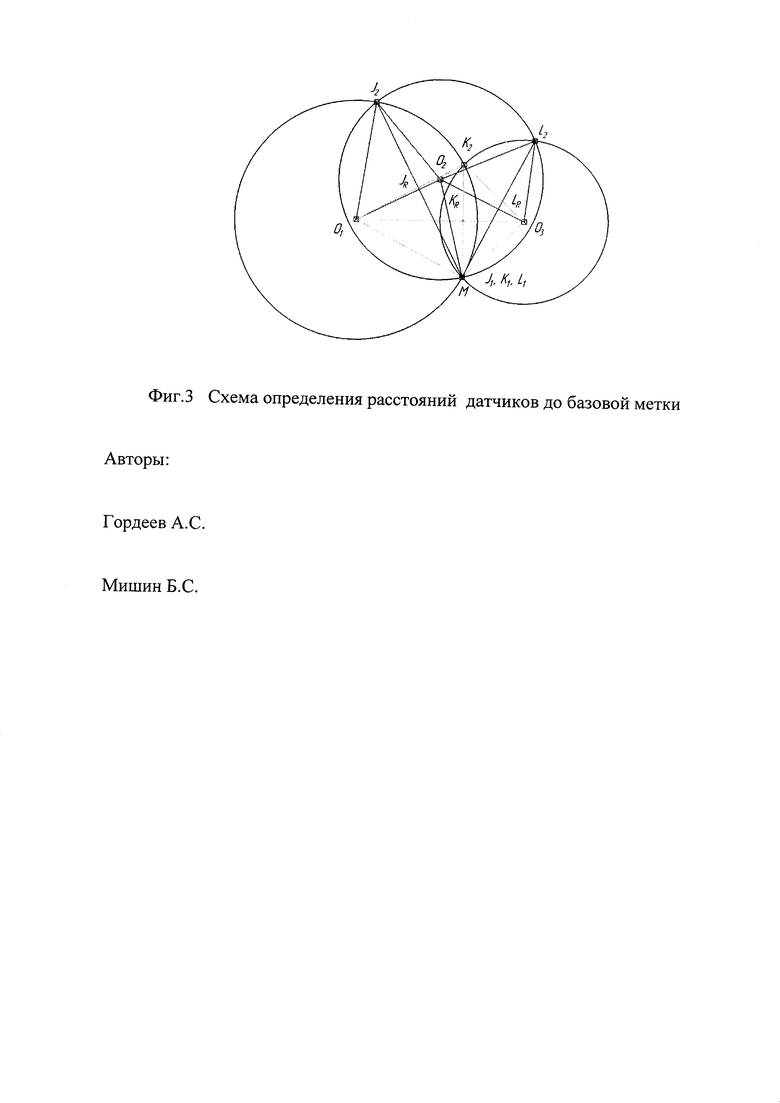
Устройство управления 13 по сигналам с датчиков 7, 8,9 рассчитывает расстояние до базовой метки по схеме, приведенной на фиг. 3.
На фиг. 3 обозначено: радикальная ось J1J2 - прямая, соединяющую точки пересечения окружностей O1 и O2; радикальная ось K1K2 - прямая, соединяющая точки пересечения окружностей O1 и О3; радикальную ось L1L2 - прямую, соединяющую точки пересечения окружностей O2 и О3; JR - середина радикальной оси J1J2; KR - середина радикальной оси K1K2; LR - середина радикальной оси L1L2; αJ - угол J1O1JR; γJ - угол O1J1JR; αK - угол K1O1KR; γK - угол O1K1KR; αL - угол L1O2LR; γL - угол O2L1LR; O1x, O2x, О3х - координаты центров окружностей O1, O2, O3 по оси X; O1y, O2y, О3y - координаты центров окружностей O1, O2, O3 по оси Y; J1x, J2x - координаты точек пересечения окружностей O1, O2 по оси X; L1y, J2y - координаты точек пересечения окружностей O1, O2 по оси Y; K1x, K2x - координаты точек пересечения окружностей O1, О3 по оси X; K1y, K2y - координаты точек пересечения окружностей O1, О3 по оси Y; L1x, L2x - координаты точек пересечения окружностей O2, O3 по оси X; L1y, L2y - координаты точек пересечения окружностей O2, О3 по оси Y; JRx - координата точки середины радикальной оси L1J2 по оси X; JRy - координата точки середины радикальной оси J1J2 по оси Y; KRx - координата точки середины радикальной оси K1K2 по оси X; KRy - координата точки середины радикальной оси K1K2 по оси Y; LRx - координата точки середины радикальной оси L1L2 по оси X; LRy - координата точки середины радикальной оси L1L2 по оси Y, М(Мх,My) - координаты базовой метки.
Расстояние h от базовой метки до датчика рассчитывается по формуле:

где R8=f(u8) - расстояние от базовой метки 17 до датчика 8, R9 - расстояние от базовой метки 17 до датчика 9, которые рассчитываются на основании сигнала базовой метки и, l89 - расстояние между датчиками 8, 9, α - угол между горизонтальной осью датчиков 8, 9 и вектором R8 относительно базовой метки.
В случае если h89=h890, h7=ft70, l9=l8 рабочий орган 5 находится в нулевой позиции, т.е. на заданных расстояниях по оси X Y и его перемещение не требуется.
В случае если h89>h890, h7>h70, l9<l8 рабочий орган 5 находится правее метки 17, и выше оптимального расстояния h890, h70. Сигналы датчиков уменьшаются, что фиксируется устройством управления 13. После расчета коэффициентов смещения на усилители 14,15 подаются управляющие сигналы электродвигателями 3,4. Электродвигатель 3 перемещает рабочий орган 5 по оси X на расстояние dx. Электродвигатель 4 перемещает рабочий орган 5 по оси Y на расстояние dy. После этого устройство управления 13 запрашивает значения сигналов с датчиков 7, 8, 9, с целью сравнения текущих их значений с предыдущими. Перемещение рабочего органа происходит до тех пор, пока не будут выполнены равенства h89=h890, h7=h70, l9=l8.
В остальных случаях перемещение рабочего органа происходит по тому же алгоритму, что описан выше.
При анализе изобретения на соответствие критерию «новизна» выявлено, что часть признаков заявленной совокупности (растения, содержащее прикрепленную к ней металлическую базовую метку, координатор с приводами горизонтального и вертикального перемещения и расположенным на его оси излучателем электромагнитных колебаний, трех датчиков электромагнитных колебаний, соединенных с устройством управления, выходы которого соединены через усилители с приводами горизонтального и вертикального перемещения координатора рабочего органа) являются новыми соответствуют критериям «новизна».
Заявленное техническое решение обеспечивает точное позиционирование рабочего органа при выкопки растений и других операциях при работе оборудования с почвой.
Источники информации
1. Пат. №2511234 Российская Федерация, МПК7 A01D 23/02. Машина для отделения отводков вегетативно размножаемых подвоев/ Бросалин В.Г., Манаенков K.А.; заявитель и патентообладатель Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Мичуринский государственный аграрный университет" - 2012129642/13, заявл. 12.07.2012; опубл. 10.04.2014 Бюл. №10.
2. Пат. №2137327. Российская Федерация, МПК А01В 39/16 (1995.01). Машина для обработки межствольных полос в саду/ Завражнов А.И., Манаенков А.Н., Бросалин В.Г., Манаенков К.А.; заявитель и патентообладатель Мичуринская государственная сельскохозяйственная академия - 98111266/13, заявл. 09.06.1998; опубл. 20.09.1999.
3. Пат. №2310315. Российская Федерация, МПК A01D 45/26 (2006.01). Копирующее устройство срезающего аппарата капустоуборочной машины / Алатырев С.С, Григорьев А.О., заявитель и патентообладатель Алатырев С.С, Григорьев А.О. - 2005137092/12; заявл. 29.11.2005; опубл. 20.11.2007 Бюл. №32.
4 Пат. №2258341. Российская Федерация, МПК7 А01В 69/04, Н03М 1/60. Устройство автоматического контроля заданной глубины обработки почвы / Тырнов Ю.А., Агапов А.Н.; заявитель и патентообладатель Государственное научное учреждение Всероссийский научно-исследовательский и проектно-технологический институт по использованию техники и нефтепродуктов в сельском хозяйстве (ГНУ вниитин) - №2004102792/09; заявл. 30.01.2004; опубл. 20.08.2005.
5. Пат. №1777682. СССР, МПК: А01В 69/04. Устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника / Новиков В.А., Биенко Ю.Н., Ермоленко А.В., заявитель и патентообладатель Институт электроники АН БССР - 4842458, заявл. 22.06.1990; опубл. 30.11.1992.
6. Пат. №1263844. СССР, МПК Е21С 35/24, А01В 69/04. Устройство контроля положения горной машины в индукционном поле токонесущего проводника/ Новиков В.А., Биенко Ю.Н., Власов В.П., Лапин А.Н., заявитель и патентообладатель Институт электроники АН БССР - 3826098, заявл. 14.12.1984; опубл. 15.10.1986.
7. Бышов Н.В. Копирование рельефа почвы без механического контакта при удалении картофельной ботвы / Бышов Н.В., Горохова М.Н., Бышов Д.Н., Загородний О.С, Горохов А.А. // Политематический сетевой электронный научный журнал кубанского государственного аграрного университета: - Издательство: Кубанский государственный аграрный университет имени И.Т. Трубилина (Краснодар)eISSN: 1990-4665, 2013, с. 333-342.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ локального позиционирования узла-нарушителя информационной безопасности в мобильных системах передачи данных | 2019 |
|
RU2744808C2 |
| Способ измерения длины подземного трубопровода | 2017 |
|
RU2662246C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 2007 |
|
RU2356704C2 |
| МАШИНА ДЛЯ УБОРКИ КОРНЕЙ ЛЕКАРСТВЕННЫХ РАСТЕНИЙ | 1999 |
|
RU2165137C1 |
| Устройство профилирования дороги автогрейдером | 2018 |
|
RU2703074C1 |
| Способ, система и устройство автоматизации процессов посадки, обработки и уборки сельскохозяйственных делянок | 2023 |
|
RU2837897C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2470316C1 |
| УСТРОЙСТВО И СИСТЕМА ДЛЯ КОНТРОЛЯ ОБЪЕКТОВ | 2019 |
|
RU2734099C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2583157C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
Изобретение относится к системам автоматического управления рабочими органами сельскохозяйственных машин. Устройство содержит рабочий орган с приводом, усилитель привода рабочего органа, устройство управления, датчики для определения местоположения рабочего органа, блок энергопитания. Металлическая базовая метка закреплена на каждом растении для автоматизации процесса и повышения точности определения местоположения рабочего органа относительно растения. Привод рабочего органа содержит координатор с приводами горизонтального и вертикального перемещения и расположенным на его оси излучателем электромагнитных колебаний. Три датчика электромагнитных колебаний соединены с устройством управления, выходы которого соединены через усилители с приводами горизонтального и вертикального перемещения координатора рабочего органа. Обеспечивается точное позиционирование рабочего органа при выкопке растений. 3 ил.
Устройство позиционирования рабочего органа выкопочной машины, содержащее рабочий орган с приводом, усилитель привода рабочего органа, устройство управления, датчики для определения местоположения рабочего органа, блок энергопитания, отличающееся тем, что с целью автоматизации процесса и повышения точности определения местоположения рабочего органа относительно растения, последнее содержит прикрепленную к ней металлическую базовую метку, а привод рабочего органа содержит координатор с приводами горизонтального и вертикального перемещения и расположенным на его оси излучателем электромагнитных колебаний, три датчика электромагнитных колебаний соединены с устройством управления, выходы которого соединены через усилители с приводами горизонтального и вертикального перемещения координатора рабочего органа.
| US 4835691 A, 30.05.1989 | |||
| Экономайзер | 0 |
|
SU94A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАДАННОЙ ГЛУБИНЫ ОБРАБОТКИ ПОЧВЫ | 2004 |
|
RU2258341C1 |
| МАШИНА ДЛЯ ОТДЕЛЕНИЯ ОТВОДКОВ ВЕГЕТАТИВНО РАЗМНОЖАЕМЫХ ПОДВОЕВ | 2012 |
|
RU2511234C2 |

