УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретения
Настоящее изобретение относится, в общем, к области бесплатформенной инерциальной навигации, и в частности, к способу и устройству бесплатформенной инерциальной навигации для определения пространственной ориентации и пространственной позиции объекта с использованием данных, полученных одним или несколькими инерциальными датчиками.
Описание предшествующего уровня техники
Определение пространственной ориентации и пространственной позиции с использованием инерциальных данных описано, например, в патенте США US 9052202 B2, опубликованном 15.12.2011 и озаглавленном «USE OF INERTIAL SENSOR DATA TO IMPROVE MOBILE STATION POSITIONING», в котором вычисляемое значение выбирается из множества параллельно действующих моделей фильтра позиции навигации, причем данный способ осуществляет как определение факта отсутствия движения объекта, так и численную оценку меры движения. Недостаток данного подхода состоит в том, что, во-первых, значения линейного ускорения объекта и угловой скорости объекта с инерциальных датчиков не агрегируют, т.е. данный метод позволяет получить оценку пространственной ориентации объекта и пространственной позиции объекта только с некоторой вероятностью, а во-вторых, данный метод полностью ориентирован на работу с глобальной навигационной спутниковой системой.
Другим способом, осуществляющим определение пространственной ориентации и пространственной позиции с использованием инерциальных данных, является подход, описанный в патентной заявке США US 20130158941 A1, опубликованной 20.06.2013 и озаглавленной «MOVING DIRECTION DETERMINATION WITH NOISY SIGNALS FROM INERTIAL NAVIGATION SYSTEMS ON MOBILE DEVICES», который использует модель энергии вибрации для определения факта наличия движения, а также оценки его направления. Недостатками данного метода являются низкое качество оценки движения и неприменимость для случаев сложного движения, так как в результате работы не производится оценка измерения ускорения во времени.
Еще одним способом определения пространственной ориентации объекта и пространственной позиции объекта с использованием инерциальных данных является метод, описанный в статье S. M. LaValle, et al., Head tracking for the Oculus Rift, ICRA, 187-194 (2014) и заключающийся в численном интегрировании кинематически ограниченных и обработанных фильтром Калмана значений с инерциальных датчиков. Недостатками данного метода является, во-первых, практическая неприменимость для оценки пространственной позиции объекта, а во-вторых, чувствительность вычисленных значений угла рыскания к изменению магнитного поля.
Следующим примером определения пространственной ориентации объекта и пространственной позиции объекта с использованием инерциальных данных является подход, описанный в статье Х. Sun, et al., A ZUPT-Based Method for Astronaut Navigation on Planetary Surface and Performance Evaluation under Different Locomotion Patterns, ISPRS, XL-4, 239-242 (2014). Сущностью данного подхода является использование улучшенного метода коррекции по нулевой скорости (Zero-Velocity Update, ZUPT) с использованием расширенного фильтра Калмана в моменты отсутствия движения. Серьезными недостатками данного метода являются необходимость априорных знаний об остановке объекта, а также невозможность оценки пространственной ориентации объекта.
Еще одним подходом, использующим инерциальные данные, является подход, описанный в статье D. Anguita et al., A Hardware-friendly Support Vector Machine for Embedded Automotive Applications, IJCNN, 1360-1364 (2007). В основу данного метода положена классификация типов движений пользователя с использованием укрепленного на ремне комплектом инерциальных датчиков с помощью метода опорных векторов. Данный метод не производит оценку пространственной позиции объекта и пространственной ориентации объекта, а нацелен только на классификацию типов движения пользователя, таких как бег, ходьба, подъем по лестнице и т.п.
Таким образом, существует потребность в способах и устройствах, которые более точно осуществляют оценку как пространственной ориентации объекта, так и пространственной позиции объекта с использованием измерений инерциального датчика для сложного пространственного перемещения объекта, произвольного по характеру (скорости, ускорению) и направлению, без согласования с внешними ориентирами и/или использовании поступающих извне данных.
Настоящее изобретение предназначено для определения пространственной позиции объекта и пространственной ориентации объекта на основании зашумленных и искаженных измерений, выполненных одним инерциальным датчиком, без необходимости в согласовании с внешними ориентирами и/или использовании поступающих извне данных в условиях произвольного пространственного перемещения объекта.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является обеспечение способа и устройства бесплатформенной инерциальной навигации, которые позволяют получить по меньшей мере одно из следующих преимуществ:
- обеспечение устойчивого определения пространственной ориентации объекта и пространственной позиции объекта в течение длительного времени на основании зашумленных и искаженных измерений, выполненных одним или более инерциальным датчиком, без согласования с внешними ориентирами, без использования дополнительных данных от устройств, считывающих информацию об окружающем пространстве, таких как камера, приемник сигналов глобальной системы позиционирования и т.п.;
- определение пространственной ориентации объекта и пространственной позиции объекта в условиях произвольного пространственного перемещения объекта по характеру (скорости, ускорению) и направлению движения, таких как отдельные шаги с фиксацией стопы, длительное плавное движение, и т.п.; безотносительно пространственной ориентации объекта, то есть пространственная ориентация объекта может не совпадать с направлением движения объекта;
- отсутствие необходимости фабричной калибровки устройства, возможность компенсации отклонения нулевой угловой скорости гироскопа инерциального датчика и компенсации влияния неоднородности магнитного поля на значение угловой скорости объекта непосредственно в процессе использования;
- возможность объединения с другими способами и устройствами инерциальной навигации, например, на основе визуальной одометрии, или систем глобального позиционирования с целью длительного непрерывного определение пространственной ориентации объекта и пространственной позиции объекта в сложных условиях окружающей среды, таких как плохое и/или быстро меняющееся освещение, изменение температуры, наводки магнитных полей, и т.п.;
- возможность встраивания во множество различных устройств, таких как шлемы виртуальной/дополненной/совмещенной реальности, воздушные/наземные/подводные дроны, самоуправляемый транспорт (самокат, велосипед, автомобиль и т.п.), механизированные протезы, и т.п.
В настоящей заявке раскрыт способ бесплатформенной инерциальной навигации, содержащий этапы, на которых: принимают значения линейного ускорения объекта, измеренные акселерометром инерциального датчика, значения угловой скорости объекта, измеренные гироскопом инерциального датчика, значения температуры инерциального датчика, измеренные термометром инерциального датчика и значения напряженности магнитного поля, измеренные магнетометром инерциального датчика, причем значения линейного ускорения объекта, значения угловой скорости объекта, значения температуры инерциального датчика и значения напряженности магнитного поля, воздействующего на магнетометр инерциального датчика, измерены по меньшей мере одним инерциальным датчиком; если выявлено отклонение нулевой угловой скорости гироскопа инерциального датчика, выполняют коррекцию принятых значений угловой скорости объекта на поправочный коэффициент для текущего значения температуры, причем набор поправочных коэффициентов для каждого значения рабочей температуры инерциального датчика получен заранее; если выявлено изменение напряженности магнитного поля, выполняют коррекцию принятых значений угловой скорости объекта на поправочный коэффициент, причем значение поправочного коэффициента вычисляется как решение оптимизационной задачи; определяют текущую пространственную ориентацию объекта на основании принятых значений угловой скорости, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или скорректированных значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля; определяют, движется ли объект, на основании принятых значений линейного ускорения объекта и принятых значений угловой скорости объекта, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или на основании принятых значений линейного ускорения объекта и скорректированных значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, с использованием предварительно полученной первой интеллектуальной модели изменения движения объекта, причем первая интеллектуальная модель изменения движения объекта получена заранее на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект; и при определении наличия движения объекта определяют текущую пространственную позицию объекта на основании принятых значений линейного ускорения объекта и принятых значений угловой скорости объекта, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или на основании принятых значений линейного ускорения объекта и скорректированных значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, с использованием предварительно полученной второй интеллектуальной модели движения объекта, причем вторая интеллектуальная модель движения объекта получена заранее на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект, а при определении отсутствия движения объекта задают текущую пространственную позицию объекта равной предыдущей пространственной позиции объекта.
В дополнительном аспекте способ дополнительно содержит этап, на котором фильтруют принятые значения линейного ускорения объекта и принятые значения угловой скорости объекта для подавления шума, при этом фильтрацию принятых значений линейного ускорения объекта и принятых значений угловой скорости объекта выполняют посредством взвешенного усреднения методом скользящего окна.
В другом дополнительном аспекте получение поправочного коэффициента для каждого значения рабочей температуры инерциального датчика содержит этапы, на которых: определяют, движется ли объект, на основании значений линейного ускорения объекта и значений угловой скорости объекта с использованием предварительно полученной первой интеллектуальной модели изменения движения объекта; если определено, что объект не движется, формируют набор принятых значений угловой скорости объекта для текущего значения рабочей температуры инерциального датчика, причем оптимальное количество принятых значений угловой скорости объекта в упомянутом наборе определяется на основании оптимизации соотношения смещения среднего значения угловой скорости объекта и величины разброса значений угловой скорости объекта; усредняют принятые значения угловой скорости объекта упомянутого набора методом взвешенного среднего и вычисляют поправочный коэффициент для текущего значения рабочей температуры инерциального датчика посредством решения регрессионного уравнения, при этом формирование набора принятых значений угловой скорости объекта и вычисление поправочного коэффициента выполняют для каждого значения рабочей температуры инерциального датчика.
В еще одном дополнительном аспекте оптимальное количество принятых значений угловой скорости объекта в упомянутом наборе определяется методом пересечения доверительных интервалов.
В еще одном дополнительном аспекте вычисление поправочных коэффициентов для принятого значения напряженности магнитного поля для коррекций принятых значений угловой скорости объекта по изменению напряженности магнитного поля содержит этапы, на которых: принимают значения напряженности магнитного поля, модель распределения напряженности магнитного поля и предварительные калибровочные параметры магнетометра инерциального датчика, причем модель распределения напряженности магнитного поля и калибровочные параметры вычислены заранее; производится корректировка принятых значений напряженности магнитного поля с использованием калибровочных параметров магнетометра; если скорректированные значения напряженности магнитного поля удовлетворяют диапазону из принятой модели распределения напряженности магнитного поля, производится расчет поправочных коэффициентов принятых значений угловой скорости объекта как мера отклонения текущего вектора напряженности от значения упомянутой модели, если скорректированные значения напряженности магнитного поля не удовлетворяют диапазону из принятой модели распределения напряженности магнитного поля, производится перерасчет калибровочных параметров как задача ортогонализации и минимизации смещения среднего значения напряженности и кросс-корреляции между осями.
В еще одном дополнительном аспекте текущую пространственную ориентацию объекта вычисляют методом численного интегрирования.
В еще одном дополнительном аспекте определение, движется ли объект, выполняют путем сравнения значения евклидовой нормы угловой скорости объекта с одной константой и сравнения значения евклидовой нормы линейного ускорения объекта с другой константой, причем упомянутые сравнения с константами заданы в первой интеллектуальной модели изменения движения объекта, при этом определяют, что объект не движется, если значение евклидовой нормы угловой скорости объекта и значение евклидовой нормы линейного ускорения объекта не превышают упомянутую константу, и определяют, что объект движется, если значение евклидовой нормы угловой скорости объекта и значение евклидовой нормы линейного ускорения объекта превышают упомянутую константу.
В еще одном дополнительном аспекте определение, движется ли объект, осуществляется путем сравнения значения евклидовой нормы линейного ускорения объекта с одним адаптивным порогом методом скользящего окна и сравнения значения евклидовой нормы угловой скорости объекта с другим адаптивным порогом методом скользящего окна, причем способ упомянутого сравнения с адаптивными порогами и способ вычисления адаптивных порогов методом скользящего окна заданы в первой интеллектуальной модели изменения движения объекта.
В еще одном дополнительном аспекте вычисление адаптивного порога и сравнение с ним евклидовой нормы линейного ускорения объекта производится итеративно и содержит этапы, на которых: устанавливают адаптивный порог, причем предварительно считается, что объект не движется, и адаптивный порог вычислен заранее; принимают заданный порог для определения движения и заданный порог для определения отсутствия движения; производят сравнение значения нормы линейного ускорения объекта с адаптивным порогом, и если значение нормы линейного ускорения объекта не превышает адаптивный порог, то определяют, что объект не движется; если значение нормы линейного ускорения объекта превышает адаптивный порог, то определяют длительность, как долго значение нормы линейного ускорения объекта превышает адаптивный порог; если длительность нахождения значения нормы линейного ускорения объекта более адаптивного порога превышает порог для определения движения, то определяют, что объект движется, при этом адаптивный порог не изменяется; если длительность нахождения значения нормы линейного ускорения объекта более адаптивного порога не превышает порог для определения движения, то определяют, что объект не движется; если определено, что объект не движется, производят перерасчет текущего адаптивного порога путем вычисления среднего взвешенного значений линейного ускорения объекта в скользящем окне, а затем присвоения текущему значению адаптивного порога максимального значения между текущим значением адаптивного порога и максимальным значением между вычисленными средним взвешенным значением и максимальным значением ковариационной матрицы; если определено, что объект движется, сравнивают значение нормы линейного ускорения объекта с адаптивным порогом, и если значение нормы линейного ускорения объекта превышает адаптивный порог, то определяют, что объект продолжает движение; если значение нормы линейного ускорения объекта не превышает адаптивный порог, то завершение движения определяют путем сравнения длительности, как долго значение нормы линейного ускорения объекта меньше порога для определения отсутствия движения, и если длительность нахождения менее адаптивного порога превышает порог для определения отсутствия движения, то определяют, что объект не движется, при этом адаптивный порог пересчитывают в соответствии с нормой входных значений линейного ускорения объекта.
В еще одном дополнительном аспекте адаптивный порог вычисляют как усредненное по множеству различный тестовых данных значение нормы линейного ускорения объектов одного того же типа, при котором однозначно выявлено движение.
В еще одном дополнительном аспекте определение, движется ли объект, осуществляется с использованием по меньшей мере одной предварительно обученной рекуррентной нейронной сети в качестве первой интеллектуальной модели изменения движения объекта.
В еще одном дополнительном аспекте определение, движется ли объект, осуществляется с использованием каскада предварительно обученных рекуррентных нейронных сетей в качестве первой интеллектуальной модели изменения движения объекта.
В еще одном дополнительном аспекте каждая рекуррентная нейронная сеть представляет собой долгую краткосрочную память (LSTM).
В еще одном дополнительном аспекте определение текущей пространственной позиции объекта при определении наличия движения объекта содержит этапы, на которых: определяют вектор направления движения объекта посредством вычисления среднего значения значений линейного ускорения объекта в глобальной системе координат методом скользящего окна и привязки этого среднего значения к системе координат, в которой вертикальная ось параллельна вектору ускорения свободного падения; оценивают скорость объекта на основании значений линейного ускорения объекта с использованием второй интеллектуальной модели движения объекта; проецируют оцененную скорость объекта на определенный вектор направления движения объекта и получают текущую пространственную позицию объекта методом численного интегрирования.
В еще одном дополнительном аспекте определяют вектор направления движения объекта методом опорных векторов (SVM).
В еще одном дополнительном аспекте определяют вектор направления движения объекта с использованием предварительно обученной рекуррентной нейронной сети.
В еще одном дополнительном аспекте оценивают линейную скорость объекта на основании значений линейного ускорения объекта с использованием полиномиальной модели скорости в качестве второй интеллектуальной модели движения объекта.
В еще одном дополнительном аспекте оценивают линейную скорость объекта на основании значений линейного ускорения объекта с использованием предварительно обученной рекуррентной нейронной сети в качестве второй интеллектуальной модели движения объекта.
В еще одном дополнительном аспекте оценивают линейную скорость объекта на основании значений линейного ускорения объекта с использованием комбинации предварительно обученных моделей в качестве второй интеллектуальной модели движения объекта.
В еще одном дополнительном аспекте, если принимают значения линейного ускорения объекта, значения угловой скорости объекта, значения температуры и значения напряженности магнитного поля, измеренные более чем одним инерциальным датчиком, то независимо определяют текущую пространственную ориентацию объекта на основании принятых значений, измеренных каждым датчиком, и независимо определяют текущую пространственную позицию объекта на основании принятых значений, измеренных каждым датчиком, при этом упомянутый способ дополнительно содержит этапы, на которых: вычисляют результирующую текущую пространственную ориентацию объекта на основании всех текущих пространственных ориентаций объекта, определенных независимо на основании принятых значений с разных инерциальных датчиков; и вычисляют результирующую текущую пространственную позицию объекта на основании всех текущих пространственных позиций объекта, определенных независимо на основании принятых значений с разных инерциальных датчиков.
В еще одном дополнительном аспекте вычисление результирующей текущей пространственной ориентации объекта и вычисление результирующей текущей пространственной позиции объекта производятся посредством взвешенного усреднения текущих пространственных ориентаций объекта и текущих пространственных позиций объекта, определенных независимо на основании принятых значений, измеренных разными инерциальными датчиками.
Кроме того, в настоящей заявке раскрыто устройство бесплатформенной инерциальной навигации, содержащее: блок коррекции по температуре, выполненный с возможностью, если выявлено отклонение нулевой угловой скорости гироскопа инерциального датчика, выполнения коррекции значений угловой скорости объекта на поправочный коэффициент для текущего значения температуры, причем набор поправочных коэффициентов для каждого значения рабочей температуры инерциального датчика получен заранее; блок коррекции по магнитному полю, выполненный с возможностью, если выявлено изменение напряженности магнитного поля, выполнения коррекции значений угловой скорости объекта на поправочный коэффициент, причем значение поправочного коэффициента вычисляется как решение оптимизационной задачи; блок определения пространственной ориентации, выполненный с возможностью определения текущей пространственной ориентации объекта на основании значений угловой скорости, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или скорректированных значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля; блок определения движения, выполненный с возможностью определения, движется ли объект, на основании значений линейного ускорения объекта и значений угловой скорости объекта, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или на основании значений линейного ускорения объекта и скорректированных значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, с использованием предварительно полученной первой интеллектуальной модели изменения движения объекта, причем первая интеллектуальная модель изменения движения объекта получена заранее на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект; и блок определения пространственной позиции, выполненный с возможностью, при определении наличия движения объекта, определения текущей пространственной позиции объекта на основании значений линейного ускорения объекта и значений угловой скорости объекта, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или на основании значений линейного ускорения объекта и скорректированных значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, с использованием предварительно полученной второй интеллектуальной модели движения объекта, причем вторая интеллектуальная модель движения объекта получена заранее на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект, а, при определении отсутствия движения объекта, задания текущей пространственной позиции объекта равной предыдущей пространственной позиции объекта, при этом значения линейного ускорения объекта измерены акселерометром инерциального датчика, значения угловой скорости объекта, измерены гироскопом инерциального датчика, значения температуры инерциального датчика, измерены термометром инерциального датчика и значения напряженности магнитного поля, измерены магнетометром инерциального датчика, причем значения линейного ускорения объекта, значения угловой скорости объекта, значения температуры инерциального датчика и значения напряженности магнитного поля, воздействующего на магнетометр инерциального датчика, измерены по меньшей мере одним инерциальным датчиком.
В дополнительном аспекте устройство дополнительно содержит фильтр, выполненный с возможностью фильтрации значений линейного ускорения объекта и значений угловой скорости объекта для подавления шума, при этом фильтрацию значений линейного ускорения объекта и значений угловой скорости объекта выполняется посредством взвешенного усреднения методом скользящего окна.
В другом дополнительном аспекте блок коррекции по температуре получает поправочный коэффициент для каждого значения рабочей температуры инерциального датчика посредством: если определено, что объект не движется, формирования набора значений угловой скорости объекта для текущего значения рабочей температуры инерциального датчика, причем оптимальное количество значений угловой скорости объекта в упомянутом наборе определяется на основании оптимизации соотношения смещения среднего значения угловой скорости объекта и величины разброса значений угловой скорости объекта; усреднения значений угловой скорости объекта упомянутого набора методом взвешенного среднего и вычисления поправочного коэффициента для текущего значения рабочей температуры инерциального датчика посредством решения регрессионного уравнения, при этом формирование набора значений угловой скорости объекта и вычисление поправочного коэффициента выполняют для каждого значения рабочей температуры инерциального датчика.
В еще одном дополнительном аспекте оптимальное количество значений угловой скорости объекта в упомянутом наборе определяется методом пересечения доверительных интервалов.
В еще одном дополнительном аспекте блок коррекции по магнитному полю вычисляет поправочные коэффициенты для значения напряженности магнитного поля для коррекций значений угловой скорости объекта по изменению напряженности магнитного поля посредством: корректировки значений напряженности магнитного поля с использованием калибровочных параметров магнетометра; если скорректированные значения напряженности магнитного поля удовлетворяют диапазону из модели распределения напряженности магнитного поля, расчета поправочных коэффициентов значений угловой скорости объекта как меры отклонения текущего вектора напряженности от значения упомянутой модели, если скорректированные значения напряженности магнитного поля не удовлетворяют диапазону из модели распределения напряженности магнитного поля, перерасчета калибровочных параметров как задачи ортогонализации и минимизации смещения среднего значения напряженности и кросс-корреляции между осями, причем модель распределения напряженности магнитного поля и калибровочные параметры вычислены заранее.
В еще одном дополнительном аспекте блок определения пространственной ориентации определяет текущую пространственную ориентацию объекта посредством вычисления методом численного интегрирования.
В еще одном дополнительном аспекте блок определения движения определяет, движется ли объект, путем сравнения значения евклидовой нормы угловой скорости объекта с одной константой и сравнения значения евклидовой нормы линейного ускорения объекта с другой константой, причем упомянутые сравнения с константами заданы в первой интеллектуальной модели изменения движения объекта, при этом определено, что объект не движется, если значение евклидовой нормы угловой скорости объекта и значение евклидовой нормы линейного ускорения объекта не превышают упомянутую константу, и определено, что объект движется, если значение евклидовой нормы угловой скорости объекта и значение евклидовой нормы линейного ускорения объекта превышают упомянутую константу.
В еще одном дополнительном аспекте блок определения движения определяет, движется ли объект, путем сравнения значения евклидовой нормы линейного ускорения объекта с одним адаптивным порогом методом скользящего окна и сравнения значения евклидовой нормы угловой скорости объекта с другим адаптивным порогом методом скользящего окна, причем способ упомянутого сравнения с адаптивными порогами и способ вычисления адаптивных порогов методом скользящего окна заданы в первой интеллектуальной модели изменения движения объекта.
В еще одном дополнительном аспекте вычисление адаптивного порога и сравнение с ним евклидовой нормы линейного ускорения объекта производится итеративно посредством: установки адаптивного порога, причем предварительно считается, что объект не движется, и адаптивный порог вычислен заранее; приема заданного порога для определения движения и заданного порога для определения отсутствия движения; сравнения значения нормы линейного ускорения объекта с адаптивным порогом, и если значение нормы линейного ускорения объекта не превышает адаптивный порог, то определяется, что объект не движется; если значение нормы линейного ускорения объекта превышает адаптивный порог, то определяется длительность, как долго значение нормы линейного ускорения объекта превышает адаптивный порог, если длительность нахождения значения нормы линейного ускорения объекта более адаптивного порога превышает порог для определения движения, то определяется, что объект движется, при этом адаптивный порог не изменяется; если длительность нахождения значения нормы линейного ускорения объекта более адаптивного порога не превышает порог для определения движения, то определяется, что объект не движется; если определено, что объект не движется, производится перерасчет текущего адаптивного порога путем вычисления среднего взвешенного значений линейного ускорения объекта в скользящем окне, а затем присвоения текущему значению адаптивного порога максимального значения между текущим значением адаптивного порога и максимальным значением между вычисленными средним взвешенным значением и максимальным значением ковариационной матрицы; если определено, что объект движется, сравнивается значение нормы линейного ускорения объекта с адаптивным порогом, и если значение нормы линейного ускорения объекта превышает адаптивный порог, то определяется, что объект продолжает движение; если значение нормы линейного ускорения объекта не превышает адаптивный порог, то завершение движения определяется путем сравнения длительности, как долго значение нормы линейного ускорения объекта меньше порога для определения отсутствия движения, и если длительность нахождения менее адаптивного порога превышает порог для определения отсутствия движения, то определяется, что объект не движется, при этом адаптивный порог пересчитывают в соответствии с нормой входных значений линейного ускорения объекта.
В еще одном дополнительном аспекте адаптивный порог вычисляется как усредненное по множеству различный тестовых данных значение нормы линейного ускорения объектов одного того же типа, при котором однозначно выявлено движение.
В еще одном дополнительном аспекте блок определения движения определяет, движется ли объект, с использованием по меньшей мере одной предварительно обученной рекуррентной нейронной сети в качестве первой интеллектуальной модели изменения движения объекта.
В еще одном дополнительном аспекте блок определения движения определяет, движется ли объект, с использованием каскада предварительно обученных рекуррентных нейронных сетей в качестве первой интеллектуальной модели изменения движения объекта.
В еще одном дополнительном аспекте каждая рекуррентная нейронная сеть представляет собой долгую краткосрочную память (LSTM).
В еще одном дополнительном аспекте блок определения пространственной позиции определяет текущую пространственную позицию объекта при определении наличия движения объекта посредством: определения вектора направления движения объекта посредством вычисления среднего значения значений линейного ускорения объекта в глобальной системе координат методом скользящего окна и привязки этого среднего значения к системе координат, в которой вертикальная ось параллельна вектору ускорения свободного падения; оценки скорости объекта на основании значений линейного ускорения объекта с использованием второй интеллектуальной модели движения объекта; проецирования оцененной скорости объекта на определенный вектор направления движения объекта и получения текущей пространственной позиции объекта методом численного интегрирования.
В еще одном дополнительном аспекте определение вектора направления движения объекта выполняется методом опорных векторов (SVM).
В еще одном дополнительном аспекте определение вектора направления движения объекта выполняется с использованием предварительно обученной рекуррентной нейронной сети.
В еще одном дополнительном аспекте оценка линейной скорости объекта на основании значений линейного ускорения объекта выполняется с использованием полиномиальной модели скорости в качестве второй интеллектуальной модели движения объекта.
В еще одном дополнительном аспекте оценка линейной скорости объекта на основании значений линейного ускорения объекта выполняется с использованием предварительно обученной рекуррентной нейронной сети в качестве второй интеллектуальной модели движения объекта.
В еще одном дополнительном аспекте оценка линейной скорости объекта на основании значений линейного ускорения объекта выполняется с использованием комбинации предварительно обученных моделей в качестве второй интеллектуальной модели движения объекта.
В еще одном дополнительном аспекте, если значения линейного ускорения объекта, значения угловой скорости объекта, значения температуры и значения напряженности магнитного поля измерены более чем одним инерциальным датчиком, то блок определения пространственной ориентации независимо определяет текущую пространственную ориентацию объекта на основании значений, измеренных каждым датчиком, и вычисляет результирующую текущую пространственную ориентацию объекта на основании всех текущих пространственных ориентаций объекта, определенных независимо на основании принятых значений с разных инерциальных датчиков, и блок определения пространственной позиции независимо определяет текущую пространственную позицию объекта на основании значений, измеренных каждым датчиком, и вычисляет результирующую текущую пространственную позицию объекта на основании всех текущих пространственных позиций объекта, определенных независимо на основании принятых значений с разных инерциальных датчиков.
В еще одном дополнительном аспекте блок определения пространственной ориентации вычисляет результирующую текущую пространственную ориентацию объекта посредством взвешенного усреднения текущих пространственных ориентаций объекта, определенных независимо на основании значений, измеренных разными инерциальными датчиками; и блок определения пространственной позиции вычисляет результирующую текущую пространственную позицию объекта посредством взвешенного усреднения текущих пространственных позиций объекта, определенных независимо на основании принятых значений, измеренных разными инерциальными датчиками.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеописанные и другие аспекты, признаки и преимущества настоящего изобретения будут более понятны из последующего подробного описания, приведенного в сочетании с прилагаемыми чертежами, на которых:
Фиг. 1 представляет собой блок-схему последовательности операций, иллюстрирующую один вариант осуществления способа бесплатформенной инерциальной навигации.
Фиг. 2 представляет собой блок-схему последовательности операций, иллюстрирующую другой вариант осуществления способа бесплатформенной инерциальной навигации.
Фиг. 3 представляет собой блок-схему, иллюстрирующую один вариант осуществления устройства бесплатформенной инерциальной навигации.
Фиг. 4 представляет собой блок-схему, иллюстрирующую другой вариант осуществления устройства бесплатформенной инерциальной навигации.
Фиг. 5 представляет собой график, иллюстрирующий выбор оптимального количества значений угловой скорости объекта при получении поправочного коэффициента для каждого значения рабочей температуры инерциального датчика.
Фиг. 6 представляет собой блок-схему, иллюстрирующую применение изобретения в качестве устройства распознавания и аутентификации пользователя.
Фиг. 7 представляет собой блок-схему, иллюстрирующую применение изобретения в качестве системы автоматического регулирования движения транспортного средства.
Фиг. 8 представляет собой блок-схему, иллюстрирующую применение изобретения в качестве системы автоматического регулирования движения транспортного средства в 3-мерном пространстве.
В последующем описании, если не указано иное, одинаковые ссылочные позиции используются для обозначения одних и тех же элементов устройства или этапов способа, когда они изображены на разных чертежах, и их параллельное описание не приводится.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Нижеследующее описание со ссылкой на прилагаемые чертежи приведено, чтобы облегчить полное понимание различных вариантов осуществления настоящего изобретения, заданного формулой изобретения, и его эквивалентов. Описание включает в себя различные конкретные подробности, чтобы облегчить такое понимание, но данные подробности следует считать только примерными. Соответственно, специалисты в данной области техники обнаружат, что можно разработать различные изменения и модификации различных вариантов осуществления, описанных в настоящей заявке, без выхода за пределы объема настоящего изобретения. Кроме того, описания общеизвестных функций и конструкций могут быть исключены для ясности и краткости.
Термины и формулировки, используемые в последующем описании и формуле изобретения не ограничены библиографическим значениями, а просто использованы создателем настоящего изобретения, чтобы обеспечить четкое и последовательное понимание настоящего изобретения. Соответственно, специалистам в данной области техники должно быть ясно, что последующее описание различных вариантов осуществления настоящего изобретения предлагается только для иллюстрации.
Следует понимать, что формы единственного числа включают в себя множественность, если контекст явно не указывает иное.
Дополнительно следует понимать, что термины «содержит», «содержащий», «включает в себя» и/или «включающий в себя», при использовании в настоящей заявке, означают присутствие изложенных признаков, значений, операций, элементов и/или компонентов, но не исключают присутствия или добавления одного или более других признаков, значений, операций, элементов, компонентов и/или их групп.
Способ и устройство бесплатформенной инерциальной навигации могут применяться как для отслеживания движения объекта в 2-х мерном пространстве, так и для отслеживания движения объекта в 3-х мерном пространстве. Объектами, для которых могут быть использованы способ и устройство бесплатформенной инерциальной навигации, являются люди, различные транспортные средства, такие как, например, транспортные средства, управляемые водителем, и транспортные средства с автоматическим управлением (самокат, велосипед, автомобиль и т.п.), воздушные/наземные/подводные дроны и т.д. Способ и устройство бесплатформенной инерциальной навигации также могут применяться для механизированных протезов, шлемов виртуальной/дополненной/совмещенной реальности, распознавания и аутентификации пользователя по конкретным образцам человеческого движения, автоматического регулирования движения транспортного средства.
В дальнейшем, различные варианты осуществления настоящего изобретения описаны более подробно со ссылкой на прилагаемые чертежи.
Один вариант осуществления способа бесплатформенной инерциальной навигации представлен на фиг. 1.
На этапе 101 способа бесплатформенной инерциальной навигации принимают значения линейного ускорения объекта, измеренные акселерометром инерциального датчика, значения угловой скорости объекта, измеренные гироскопом инерциального датчика, значения температуры инерциального датчика, измеренные термометром инерциального датчика и значения напряженности магнитного поля, измеренные магнетометром инерциального датчика. Значения линейного ускорения объекта, значения угловой скорости объекта, значения температуры инерциального датчика и значения напряженности магнитного поля, воздействующего на магнетометр инерциального датчика, измерены по меньшей мере одним инерциальным датчиком.
На этапе 102 способа бесплатформенной инерциальной навигации, если выявлено отклонение нулевой угловой скорости гироскопа инерциального датчика, выполняют коррекцию принятых на этапе 101 значений угловой скорости объекта на поправочный коэффициент для текущего значения температуры, причем набор поправочных коэффициентов для каждого значения рабочей температуры инерциального датчика получен заранее.
Отклонение нулевой угловой скорости гироскопа определяется как ненулевое значение угловой скорости объекта при условии, что выявлено отсутствие движение объекта. Известно, что каждый отдельный экземпляр гироскопа может иметь свое значение отклонения в измерении угловой скорости, причем различное для различных значений температуры гироскопа. Повышение точности и устойчивости измерений угловой скорости объекта  для рабочей температуры
для рабочей температуры  добиваются путем компенсации измерений на поправочный коэффициент
добиваются путем компенсации измерений на поправочный коэффициент  в виде
в виде  , где
, где  означает скорректированное значение угловой скорости объекта для рабочей температуры .
означает скорректированное значение угловой скорости объекта для рабочей температуры .
На этапе 103 способа бесплатформенной инерциальной навигации, если выявлено изменение напряженности магнитного поля, выполняют коррекцию принятых на этапе 101 или скорректированных на этапе 102 значений угловой скорости объекта на поправочный коэффициент. Значение поправочного коэффициента вычисляется как решение оптимизационной задачи. Повышение точности и устойчивости измерений угловой скорости  объекта добиваются путем компенсации измерений значения магнитного поля на поправочный коэффициент
объекта добиваются путем компенсации измерений значения магнитного поля на поправочный коэффициент  в виде
в виде  , где
, где  означает скорректированное значение угловой скорости объекта.
означает скорректированное значение угловой скорости объекта.
На этапе 104 способа бесплатформенной инерциальной навигации определяют текущую пространственную ориентацию объекта на основании принятых на этапе 101 значений угловой скорости, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или скорректированных на этапах 102 и/или 103 значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости гироскопа и/или изменение напряженности магнитного поля. Текущая пространственная ориентация объекта вычисляется методом численного интегрирования, который широко известен в уровне техники.
На этапе 105 способа бесплатформенной инерциальной навигации определяют, движется ли объект, на основании принятых на этапе 101 значений линейного ускорения объекта и принятых на этапе 101 значений угловой скорости объекта, если не выявлено отклонение нулевой угловой скорости гироскопа и/или изменение напряженности магнитного поля, или на основании принятых на этапе 101 значений линейного ускорения объекта и скорректированных на этапах 102 и/или 103 значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, с использованием предварительно полученной первой интеллектуальной модели изменения движения объекта. Первая интеллектуальная модель изменения движения объекта получена заранее на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект.
На этапе 106 способа бесплатформенной инерциальной навигации при определении наличия движения объекта определяют текущую пространственную позицию объекта на основании принятых на этапе 101 значений линейного ускорения объекта и принятых на этапе 101 значений угловой скорости объекта, если не выявлено отклонение нулевой угловой скорости гироскопа и/или изменение напряженности магнитного поля, или на основании принятых на этапе 101 значений линейного ускорения объекта и скорректированных на этапах 102 и/или 103 значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, с использованием предварительно полученной второй интеллектуальной модели движения объекта. Вторая интеллектуальная модель движения объекта получена заранее на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект. При определении отсутствия движения объекта задают текущую пространственную позицию объекта равной предыдущей пространственной позиции объекта.
Другой вариант осуществления способа бесплатформенной инерциальной навигации представлен на фиг. 2 и содержит этапы 101-106, описанные выше. Кроме того, представленный на фиг. 2 вариант осуществления способа бесплатформенной инерциальной навигации содержит дополнительный этап 107, на котором фильтруют принятые на этапе 101 значения линейного ускорения объекта и значения угловой скорости объекта для подавления шума. Фильтрацию принятых значений линейного ускорения объекта и принятых значений угловой скорости объекта выполняют посредством взвешенного усреднения методом скользящего окна. Кроме того, для фильтрации принятых значений линейного ускорения объекта и принятых значений угловой скорости объекта может применяться любой другой подходящий способ фильтрации. Фильтрация посредством взвешенного усреднения методом скользящего окна широко известна в уровне техники и ее подробное описание не требуется.
При получении поправочного коэффициента угловой скорости объекта для каждого значения рабочей температуры инерциального датчика определяют, движется ли объект, на основании значений линейного ускорения объекта и значений угловой скорости объекта с использованием предварительно полученной первой интеллектуальной модели изменения движения объекта. Если определено, что объект не движется, формируют набор принятых значений угловой скорости объекта для текущего значения рабочей температуры инерциального датчика, причем оптимальное количество принятых значений угловой скорости объекта в упомянутом наборе определяется на основании оптимизации соотношения смещения  среднего значения угловой скорости объекта и величины разброса var значений угловой скорости объекта. Затем усредняют принятые значения угловой скорости объекта упомянутого набора методом взвешенного среднего и вычисляют поправочный коэффициент для текущего значения рабочей температуры инерциального датчика посредством решения регрессионного уравнения.
среднего значения угловой скорости объекта и величины разброса var значений угловой скорости объекта. Затем усредняют принятые значения угловой скорости объекта упомянутого набора методом взвешенного среднего и вычисляют поправочный коэффициент для текущего значения рабочей температуры инерциального датчика посредством решения регрессионного уравнения.
Формирование набора принятых значений угловой скорости объекта и вычисление поправочного коэффициента выполняют для каждого значения рабочей температуры инерциального датчика.
Поправочный коэффициент находится как решение полиномиальной аппроксимации m-го порядка  . Вектор коэффициентов линейной полиномиальной аппроксимации
. Вектор коэффициентов линейной полиномиальной аппроксимации  вычисляются из регрессионной модели
вычисляются из регрессионной модели  , где
, где  есть вектор измерений отклонения нулевой угловой скорости гироскопа, содержащий оптимальное количество
есть вектор измерений отклонения нулевой угловой скорости гироскопа, содержащий оптимальное количество  элементов.
элементов.
Количество значений отклонений нулевой угловой скорости гироскопа, используемых для определения поправочного коэффициента для каждого значения рабочей температуры , регулируется исходя из достижения баланса между точностью аппроксимации (малое смещение) результата и достаточной сглаженностью (низкая дисперсия). Этот баланс достигается с помощью статистического критерия, который известен как пересечение доверительных интервалов (intersection of confidence intervals, ICI), впервые описанный в A. Goldenshluger, A. Nemirovski, On spatial adaptive estimation of non-parametric regression. Math Meth Statistics 6, 135-170 (1997), как аргумент минимизации среднеквадратичной функции потерь  , где означает смещение среднего значения угловой скорости объекта, а var означает величину разброса значений угловой скорости объекта (дисперсию).
, где означает смещение среднего значения угловой скорости объекта, а var означает величину разброса значений угловой скорости объекта (дисперсию).
Следуя [V. Katkovnik, K. Egiazarian and J. Astola, Local Approximation Techniques in Signal and Image Processing, SPIE Press Monograph Vol. PM157 (2006)], для вычисления оптимального количества значений угловой скорости объекта формируется вектор y значений угловой скорости объекта для условии, когда определено, что движения нет. Например, вектор y составляется из значений, евклидова норма угловой скорости объекта и евклидовой нормы линейного ускорения объекта которого менее соответствующими заранее определенными порогов  ,
,  . Данные пороги
. Данные пороги  и
и  определяются на модельных данных, как среднее значение нормы линейного ускорения объекта и среднее значение угловой скорости объекта для заранее определенных случаем, когда сторонними средствами выявлено или задано, что объект не движется.
определяются на модельных данных, как среднее значение нормы линейного ускорения объекта и среднее значение угловой скорости объекта для заранее определенных случаем, когда сторонними средствами выявлено или задано, что объект не движется.
Производится свертка вектора накопленных значений угловой скорости объекта y с набором фильтров { }i, где результат свертки обозначен {
}i, где результат свертки обозначен { }. Пространственные фильтры {}i определяются через количество значений угловой скорости объекта {hi} в векторе y (то есть длину вектора y) для рабочей температуры . Тогда оптимальное количество значений угловой скорости объекта в y для рабочей температуры tk определяется как максимальное число значений в y, допускающее непустой доверительный интервал
}. Пространственные фильтры {}i определяются через количество значений угловой скорости объекта {hi} в векторе y (то есть длину вектора y) для рабочей температуры . Тогда оптимальное количество значений угловой скорости объекта в y для рабочей температуры tk определяется как максимальное число значений в y, допускающее непустой доверительный интервал  , где
, где  ,
,  определяет стандартное отклонение, параметр
определяет стандартное отклонение, параметр  определяет порог доверительного интервала.
определяет порог доверительного интервала.
На фиг. 5 показан выбор оптимального количества значений угловой скорости объекта исходя из соотношения смещения среднего значения угловой скорости объекта и величины разброса var значений угловой скорости объекта, как аргумент минимизации среднеквадратичной функции потерь .
При вычислении поправочных коэффициентов для принятого значения напряженности  магнитного поля для коррекций принятых значений угловой скорости объекта по изменению напряженности магнитного поля принимают значения напряженности магнитного поля, модель распределения напряженности магнитного поля и предварительные калибровочные параметры
магнитного поля для коррекций принятых значений угловой скорости объекта по изменению напряженности магнитного поля принимают значения напряженности магнитного поля, модель распределения напряженности магнитного поля и предварительные калибровочные параметры  и
и  магнетометра инерциального датчика, причем модель распределения напряженности магнитного поля и калибровочные параметры и вычислены заранее. Затем производится корректировка принятых значений напряженности магнитного поля с использованием калибровочных параметров и магнетометра. Если скорректированные значения напряженности
магнетометра инерциального датчика, причем модель распределения напряженности магнитного поля и калибровочные параметры и вычислены заранее. Затем производится корректировка принятых значений напряженности магнитного поля с использованием калибровочных параметров и магнетометра. Если скорректированные значения напряженности  магнитного поля удовлетворяют диапазону из принятой модели распределения напряженности магнитного поля, производится расчет поправочных коэффициентов принятых значений угловой скорости объекта как мера отклонения текущего вектора напряженности от значения упомянутой модели, если скорректированные значения напряженности магнитного поля не удовлетворяют диапазону из принятой модели распределения напряженности магнитного поля, производится перерасчет калибровочных параметров и как задача ортогонализации и минимизации смещения среднего значения напряженности и кросс-корреляции между осями.
магнитного поля удовлетворяют диапазону из принятой модели распределения напряженности магнитного поля, производится расчет поправочных коэффициентов принятых значений угловой скорости объекта как мера отклонения текущего вектора напряженности от значения упомянутой модели, если скорректированные значения напряженности магнитного поля не удовлетворяют диапазону из принятой модели распределения напряженности магнитного поля, производится перерасчет калибровочных параметров и как задача ортогонализации и минимизации смещения среднего значения напряженности и кросс-корреляции между осями.
Принятое значение напряженности магнитного поля в i-й момент времени корректируется как  проекция на сферу единичного радиуса
проекция на сферу единичного радиуса  с центром сферы в центре координат, то есть математическое ожидание
с центром сферы в центре координат, то есть математическое ожидание  , где и принятые калибровочные параметры магнетометра инерциального датчика, минимизирующие неортогональность осей, смещение среднего значения напряженности и кросс-корреляцию между осями. Рассмотрим текущее скорректированное значение напряженности магнитного поля и модельное значение
, где и принятые калибровочные параметры магнетометра инерциального датчика, минимизирующие неортогональность осей, смещение среднего значения напряженности и кросс-корреляцию между осями. Рассмотрим текущее скорректированное значение напряженности магнитного поля и модельное значение  , заранее определенное в условиях однородного магнитного поля. Поправка пространственной ориентации объекта выражается через разницу направлений значений напряженности и магнитного поля в плоскости, ортогональной вектору ускорения свободного падения
, заранее определенное в условиях однородного магнитного поля. Поправка пространственной ориентации объекта выражается через разницу направлений значений напряженности и магнитного поля в плоскости, ортогональной вектору ускорения свободного падения  , где верхний индекс
, где верхний индекс  и
и  означает проекция векторов напряженности магнитного поля на соответствующие оси координат x и z.
означает проекция векторов напряженности магнитного поля на соответствующие оси координат x и z.
Повышение точности и устойчивости измерений угловой скорости объекта добиваются путем компенсации измерений значения магнитного поля на поправочный коэффициент в виде , где означает скорректированное значение угловой скорости объекта для скорректированного значения напряженности магнитного поля, а поправочный коэффициент выражается как  и отражает отклонение текущего вектора напряженности магнитного поля от модельного значения при условии, что скорректированное значение напряженности магнитного поля удовлетворяет диапазону из принятой модели распределения напряженности магнитного поля. Например, в качестве модели распределения напряженности магнитного поля используют нормальное распределение. Здесь
и отражает отклонение текущего вектора напряженности магнитного поля от модельного значения при условии, что скорректированное значение напряженности магнитного поля удовлетворяет диапазону из принятой модели распределения напряженности магнитного поля. Например, в качестве модели распределения напряженности магнитного поля используют нормальное распределение. Здесь  есть коэффициент сглаживания,
есть коэффициент сглаживания,  есть матрица поворота согласования для согласования с текущей пространственной ориентации объекта.
есть матрица поворота согласования для согласования с текущей пространственной ориентации объекта.
Перерасчет калибровочных параметров и выполняют как решение оптимизационной задачи  из соображений, что значение напряженности магнитного поля не выходит за пределы 2-х стандартных отклонений от среднего значения. Матрица
из соображений, что значение напряженности магнитного поля не выходит за пределы 2-х стандартных отклонений от среднего значения. Матрица  формируется из допустимых значений напряженности магнитного поля, путем их объединения по столбцам.
формируется из допустимых значений напряженности магнитного поля, путем их объединения по столбцам.
Определение, движется ли объект, может быть выполнено путем сравнения значения евклидовой нормы угловой скорости объекта с одной константой и сравнения значения евклидовой нормы линейного ускорения объекта с другой константой. Упомянутые сравнения и упомянутые константы заданы в первой интеллектуальной модели изменения движения объекта на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект. Определяют, что объект не движется, если значение евклидовой нормы угловой скорости объекта и значение евклидовой нормы линейного ускорения объекта не превышают упомянутые константы, соответственно, и определяют, что объект движется, если значение евклидовой нормы угловой скорости объекта и значение евклидовой нормы линейного ускорения объекта превышают упомянутые константы, соответственно.
Определение, движется ли объект, также может быть осуществлено путем сравнения значения евклидовой нормы линейного ускорения объекта с одним адаптивным порогом методом скользящего окна и сравнения значения евклидовой нормы угловой скорости объекта с другим адаптивным порогом методом скользящего окна, причем способ упомянутого сравнения с адаптивными порогами и способ вычисления адаптивных порогов методом скользящего окна заданы в первой интеллектуальной модели изменения движения объекта.
Вычисление адаптивного порога и сравнение с ним евклидовой нормы линейного ускорения объекта для определения, движется ли объект, производится итеративно и включает в себя следующие операции. В качестве адаптивного порога устанавливают заранее вычисленный адаптивный порог, причем предварительно считается, что объект не движется. Затем принимают заданный порог для определения движения и заданный порог для определения отсутствия движения. Порог для определения движения и порог для определения отсутствия движения заданы в первой интеллектуальной модели изменения движения объекта на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект. Производят сравнение значения нормы линейного ускорения объекта с адаптивным порогом, и если значение нормы линейного ускорения объекта не превышает адаптивный порог, то определяют, что объект не движется. Если значение нормы линейного ускорения объекта превышает адаптивный порог, то определяю длительность, как долго значение нормы линейного ускорения объекта превышает адаптивный порог. Если длительность нахождения значения нормы линейного ускорения объекта более адаптивного порога превышает порог для определения движения, то определяют, что объект движется, при этом адаптивный порог не изменяется. Если длительность нахождения значения нормы линейного ускорения объекта более адаптивного порога не превышает порог для определения движения, то определяют, что объект не движется. Если определено, что объект не движется, производят перерасчет текущего адаптивного порога путем вычисления среднего взвешенного значений линейного ускорения объекта в скользящем окне, а затем присвоения текущему значению адаптивного порога максимального значения между текущим значением адаптивного порога и максимальным значением между вычисленными средним взвешенным значением и максимальным значением ковариационной матрицы. Если определено, что объект движется, сравнивают значение нормы линейного ускорения объекта с адаптивным порогом, и если значение нормы линейного ускорения объекта превышает адаптивный порог, то определяют, что объект продолжает движение. Если значение нормы линейного ускорения объекта не превышает адаптивный порог, то завершение движения определяют путем сравнения длительности, как долго значение нормы линейного ускорения объекта меньше порога для определения отсутствия движения, и если длительность нахождения менее адаптивного порога превышает порог для определения отсутствия движения, то определяют, что объект не движется, при этом адаптивный порог пересчитывают в соответствии с нормой входных значений линейного ускорения объекта.
Адаптивный порог может быть вычислен как усредненное по множеству различный тестовых данных значение нормы линейного ускорения объектов одного того же типа, при котором однозначно выявлено движение.
Определение, движется ли объект, может осуществляться с использованием по меньшей мере одной предварительно обученной рекуррентной нейронной сети в качестве первой интеллектуальной модели изменения движения объекта. Определение, движется ли объект, также может осуществляться с использованием каскада предварительно обученных рекуррентных нейронных сетей в качестве первой интеллектуальной модели изменения движения объекта. Каждая рекуррентная нейронная сеть может представлять собой долгую краткосрочную память (LSTM). Предварительное обучение выполняют на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект.
В предлагаемом подходе используются рекуррентные нейронные сети (recurrent neural network, RNN), то есть вид нейронных сетей, где связи между элементами, так называемые состояния, образуют направленную последовательность. Благодаря передачи состояний появляется возможность обрабатывать серии событий во времени или последовательные пространственные цепочки. Рекуррентные сети могут использовать свою внутреннюю память для обработки последовательностей произвольной длины, поэтому сети RNN применимы в таких задачах, где целостная последовательность разбита на сегменты, например, в задачах распознавания рукописного текста, распознавания речи или распознавания движения.
В данном изобретении для детектирования движения может использоваться особый вид архитектуры RNN, а именно долгая краткосрочная память (Long short-term memory, LSTM). В отличие от традиционных рекуррентных нейронных сетей, LSTM-сеть хорошо приспособлена к обучению на задачах классификации, обработки и прогнозирования временных рядов в случаях, когда важные события разделены во времени с неопределенной продолжительностью и границами. Относительная невосприимчивость к длительности временных разрывов объясняется возможностью забывания неактуальной информации, что дает LSTM преимущество по отношению к альтернативным рекуррентным нейронным сетям, скрытым Марковским моделям и другим методам обучения для последовательностей в различных сферах применения.
LSTM-сеть - это искусственная нейронная сеть, содержащая LSTM-модули вместо или в дополнение к другим сетевым модулям. LSTM-модуль - это рекуррентный модуль сети, способный запоминать значения как на короткие, так и на длинные промежутки времени. Ключом к данной возможности является то, что LSTM-модуль не использует функцию активации внутри своих рекуррентных компонентов. Таким образом, хранимое значение не размывается во времени, и градиент или штраф не исчезает при использовании метода обратного распространения ошибки во времени при тренировке сети. LSTM-модули группируются в «блоки», содержащие различные LSTM-модули. Подобное устройство характерно для «глубоких» многослойных нейронных сетей и способствует выполнению параллельных вычислений с применением соответствующего оборудования. В формулах ниже каждая переменная, записанная строчным курсивом, обозначает вектор размерности равной числу LSTM-модулей в блоке.
В данном изобретении группировка в блоки позволяет осуществлять последовательное принятие решения о наличии движения: сначала по схеме «многие к многим», когда из данных, полученных с инерциальных датчиков, выделяются группы признаков, и затем последовательное их уменьшение вплоть до последнего блока, реализующего схему «многие к одному», где принимается окончательное решение о наличии или отсутствия движения.
LSTM-блоки содержат три или четыре «вентиля», которые используются для контроля потоков информации на входах и на выходах памяти данных блоков. Эти вентили реализованы в виде логистической функции для вычисления значения в диапазоне [0, 1]. Умножение на это значение используется для частичного допуска или запрещения потока информации внутрь и наружу памяти. Например, «входной вентиль» контролирует меру вхождения нового значения в память, а «вентиль забывания» контролирует меру сохранения значения в памяти. «Выходной вентиль» контролирует меру того, в какой степени значение, находящееся в памяти, используется при расчете выходной функции активации для блока.
Веса в LSTM-блоке, выраженные в матрицах параметров W и U, используются для задания направления работы указанных вентилей через преобразование входных xt и выходных с предыдущего временного шага векторов ht-1. Традиционная LSTM с вентилями забывания с0=0 и h0=0 может быть представлена как
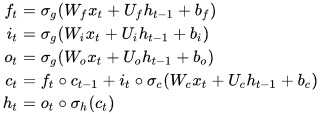
где  обозначает поэлементное произведение Адамара, σg, σc и σh означают функцию активации: сигмоидальную, на основе гиперболического тангенса и гиперболического тангенса, соответственно. xt, ht и ct означают входной, выходной вектора и вектор состояний, соответственно. it, ot и ft - вектора входного, выходного вентилей и вентиля забывания, соответственно. W, U - матрицы параметров, а b - вектор смещения, определяющие согласно нижнему индексу f, i, o и c преобразование состояния, входного, выходного векторов и вентиля забывания.
обозначает поэлементное произведение Адамара, σg, σc и σh означают функцию активации: сигмоидальную, на основе гиперболического тангенса и гиперболического тангенса, соответственно. xt, ht и ct означают входной, выходной вектора и вектор состояний, соответственно. it, ot и ft - вектора входного, выходного вентилей и вентиля забывания, соответственно. W, U - матрицы параметров, а b - вектор смещения, определяющие согласно нижнему индексу f, i, o и c преобразование состояния, входного, выходного векторов и вентиля забывания.
Тренировка весов позволяет LSTM-блоку выучить функцию, которые определяют правило распоряжение памятью. LSTM-блоки обычно тренируют при помощи метода обратного распространения ошибки во времени.
В данном изобретении в качестве первой интеллектуальной модели изменения движения объекта и второй интеллектуальной модели движения объекта могут использоваться LSTM-сети, как набор LSTM-модулей, последовательно связанных сначала по схеме «многие к многим» для выделения особенностей движения, вплоть до последнего блока, реализующего схему «многие к одному» для принятия решения о наличии или отсутствия движения объекта для первой интеллектуальной модели изменения движения объекта и для оценки синтетической скорости объекта для второй интеллектуальной модели движения объекта.
Определение текущей пространственной позиции объекта на этапе 106 при определении наличия движения объекта содержит следующие операции. Определяют вектор направления движения объекта посредством вычисления среднего значения значений линейного ускорения объекта в глобальной системе координат методом скользящего окна и привязки этого среднего значения к системе координат, в которой вертикальная ось параллельна вектору ускорения свободного падения. Затем оценивают скорость объекта на основании значений линейного ускорения объекта с использованием второй интеллектуальной модели движения объекта, проецируют оцененную скорость объекта на определенный вектор направления движения объекта и получают текущую пространственную позицию объекта методом численного интегрирования.
Линейную скорость объекта оценивают на основании значений линейного ускорения объекта с использованием полиномиальной модели скорости в качестве второй интеллектуальной модели движения объекта.
Пусть есть набор {πj} временных последовательностей изменения линейной скорости в 3х-мерном пространстве, характерных для движения объекта рассматриваемого типа. В предлагаемом подходе производится расчет компонентов синтетической линейной скорости объекта  ,
,  и
и  в k-й момент времени соответственно вдоль осей x, y и z с использованием локальной полиномиальной аппроксимации m-го порядка в виде
в k-й момент времени соответственно вдоль осей x, y и z с использованием локальной полиномиальной аппроксимации m-го порядка в виде  , где коэффициенты линейной полиномиальной аппроксимации
, где коэффициенты линейной полиномиальной аппроксимации  ,
,  и
и  для осей x, y и z вычисляются как аргумент минимизации соответствующей функции
для осей x, y и z вычисляются как аргумент минимизации соответствующей функции  ,
,  и
и  соответственно.
соответственно.
Вектор направления движения объекта определяет меру движения в 3х-мерном пространстве и вычисляется как 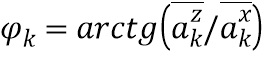 , где
, где  означает усреднение нескольких предыдущих k-му моменту времени значений линейного ускорения объекта
означает усреднение нескольких предыдущих k-му моменту времени значений линейного ускорения объекта  , p=0,1,… методом скользящего окна. Тогда значение текущей пространственной позиции объекта вычисляется в вычисленном направлении движения объекта
, p=0,1,… методом скользящего окна. Тогда значение текущей пространственной позиции объекта вычисляется в вычисленном направлении движения объекта  методом численного интегрирования.
методом численного интегрирования.
Вектор направления движения объекта может быть определен методом опорных векторов (SVM).
Вектор направления движения объекта может быть определен с использованием предварительно обученной рекуррентной нейронной сети.
Линейная скорость объекта может быть оценена на основании значений линейного ускорения объекта с использованием предварительно обученной рекуррентной нейронной сети в качестве второй интеллектуальной модели движения объекта.
Линейная скорость объекта также может быть оценена на основании значений линейного ускорения объекта с использованием комбинации предварительно обученных моделей в качестве второй интеллектуальной модели движения объекта.
Предварительное обучение выполняют на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект.
В способе бесплатформенной инерциальной навигации также возможен прием значений линейного ускорения объекта, значений угловой скорости объекта, значений температуры и значений напряженности магнитного поля, измеренных более чем одним инерциальным датчиком на этапе 101. Тогда на этапе 104 независимо определяют текущую пространственную ориентацию объекта на основании принятых значений, измеренных каждым датчиком, и на этапе 106 независимо определяют текущую пространственную позицию объекта на основании принятых значений, измеренных каждым датчиком. Упомянутый способ дополнительно содержит следующие операции. Результирующую текущую пространственную ориентацию объекта вычисляют на основании всех текущих пространственных ориентаций объекта, определенных независимо на основании принятых значений с разных инерциальных датчиков, и результирующую текущую пространственную позицию объекта вычисляют на основании всех текущих пространственных позиций объекта, определенных независимо на основании принятых значений с разных инерциальных датчиков.
Вычисление результирующих значений текущей пространственной ориентации объекта и вычисление текущей пространственной позиции объекта может производятся посредством взвешенного усреднения текущих пространственных ориентаций объекта и текущих пространственных позиций объекта, определенных независимо на основании принятых значений, измеренных разными инерциальными датчиками, либо другими известными в уровне техники способами.
Устройство бесплатформенной инерциальной навигации работает согласно способу бесплатформенной инерциальной навигации, и блоки упомянутого устройства соответственно выполняют все операции упомянутого способа, описанные выше. Поэтому подробное описание операций, выполняемых блоками устройства бесплатформенной инерциальной навигации, не приводится для избежания повторения.
Один вариант осуществления устройства бесплатформенной инерциальной навигации представлен на фиг. 3. В представленном варианте осуществления устройство бесплатформенной инерциальной навигации содержит блок 201 коррекции по температуре, блок 202 коррекции по магнитному полю, блок 203 определения пространственной ориентации, блок 204 определения движения и блок 205 определения пространственной позиции.
Другой вариант осуществления устройства бесплатформенной инерциальной навигации представлен на фиг. 4. В представленном варианте осуществления устройство бесплатформенной инерциальной навигации содержит вышеперечисленные блоки 201-205 и фильтр 206 для фильтрации значений линейного ускорения объекта и значений угловой скорости объекта для подавления шума. Фильтр 206 выполняет фильтрацию значений линейного ускорения объекта и значений угловой скорости объекта посредством взвешенного усреднения методом скользящего окна. Кроме того, для фильтрации принятых значений линейного ускорения объекта и принятых значений угловой скорости объекта может применяться любой другой подходящий способ фильтрации.
Блок 201 коррекции по температуре выполняет коррекцию значений угловой скорости объекта на поправочный коэффициент для текущего значения температуры, если выявлено отклонение нулевой угловой скорости гироскопа инерциального датчика. Набор поправочных коэффициентов для каждого значения рабочей температуры инерциального датчика получают заранее.
Блок 202 коррекции по магнитному полю выполняет коррекцию значений угловой скорости объекта на поправочный коэффициент, если выявлено изменение напряженности магнитного поля. Значение поправочного коэффициента вычисляется как решение оптимизационной задачи.
Блок 203 определения пространственной ориентации определяет текущую пространственную ориентацию объекта на основании значений угловой скорости, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или значений угловой скорости объекта, скорректированных блоками 201 и/или 202, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля.
Блок 204 определения движения определяет, движется ли объект, на основании значений линейного ускорения объекта и значений угловой скорости объекта, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или на основании значений линейного ускорения объекта и значений угловой скорости объекта, скорректированных блоками 201 и/или 202, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, с использованием предварительно полученной первой интеллектуальной модели изменения движения объекта. Первую интеллектуальную модель изменения движения объекта получают заранее на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект.
Блок 205 определения пространственной позиции при определении наличия движения объекта определяет текущую пространственную позицию объекта на основании значений линейного ускорения объекта и значений угловой скорости объекта, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или на основании значений линейного ускорения объекта и значений угловой скорости объекта, скорректированных блоками 201 и/или 202, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, с использованием предварительно полученной второй интеллектуальной модели движения объекта. Вторую интеллектуальную модель движения объекта получают заранее на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект. При определении отсутствия движения объекта блок 205 определения пространственной позиции задает текущую пространственную позицию объекта равной предыдущей пространственной позиции объекта.
Устройство бесплатформенной инерциальной навигации использует значения линейного ускорения объекта измеренные акселерометром инерциального датчика, значения угловой скорости объекта, измеренные гироскопом инерциального датчика, значения температуры инерциального датчика, измеренные термометром инерциального датчика и значения напряженности магнитного поля, измеренные магнетометром инерциального датчика, причем значения линейного ускорения объекта, значения угловой скорости объекта, значения температуры инерциального датчика и значения напряженности магнитного поля, воздействующего на магнетометр инерциального датчика, измерены по меньшей мере одним инерциальным датчиком, включающим в себя по меньшей мере акселерометр, гироскоп, термометр и магнетометр.
Блок 201 коррекции по температуре получает поправочный коэффициент для каждого значения рабочей температуры инерциального датчика при определении, что объект не движется. Блок 201 коррекции по температуре формирует набор значений угловой скорости объекта для текущего значения рабочей температуры инерциального датчика, причем оптимальное количество значений угловой скорости объекта в упомянутом наборе определяется на основании оптимизации соотношения смещения среднего значения угловой скорости объекта и величины разброса значений угловой скорости объекта. Затем блок 201 коррекции по температуре усредняет значения угловой скорости объекта упомянутого набора методом взвешенного среднего и вычисляет поправочный коэффициент для текущего значения рабочей температуры инерциального датчика посредством решения регрессионного уравнения. Формирование набора значений угловой скорости объекта и вычисление поправочного коэффициента выполняется для каждого значения рабочей температуры инерциального датчика. Блок 201 коррекции по температуре определяет оптимальное количество значений угловой скорости объекта в упомянутом наборе методом пересечения доверительных интервалов.
Блок 202 коррекции по магнитному полю вычисляет поправочные коэффициенты для значения напряженности магнитного поля для коррекций значений угловой скорости объекта по изменению напряженности магнитного поля посредством следующих операций.
Блок 202 коррекции по магнитному полю корректирует значения напряженности магнитного поля с использованием калибровочных параметров магнетометра. Калибровочные параметры вычисляются заранее. Если скорректированные значения напряженности магнитного поля удовлетворяют диапазону из вычисленной заранее модели распределения напряженности магнитного поля, блок 202 коррекции по магнитному полю рассчитывает поправочные коэффициенты значений угловой скорости объекта как меру отклонения текущего вектора напряженности от значения упомянутой модели. Если скорректированные значения напряженности магнитного поля не удовлетворяют диапазону из модели распределения напряженности магнитного поля, блок 202 коррекции по магнитному полю перерассчитывает калибровочные параметры как задачу ортогонализации и минимизации смещения среднего значения напряженности и кросс-корреляции между осями.
Блок 203 определения пространственной ориентации определяет текущую пространственную ориентацию объекта посредством вычисления методом численного интегрирования.
Блок 204 определения движения определяет, движется ли объект, путем сравнения значения евклидовой нормы угловой скорости объекта с одной константой и сравнения значения евклидовой нормы линейного ускорения объекта с другой константой, причем упомянутые сравнения с константами и константы заданы в первой интеллектуальной модели изменения движения объекта на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект. Блок 204 определения движения определяет, что объект не движется, если значение евклидовой нормы угловой скорости объекта и значение евклидовой нормы линейного ускорения объекта не превышают упомянутую константу, и определяет, что объект движется, если значение евклидовой нормы угловой скорости объекта и значение евклидовой нормы линейного ускорения объекта превышают упомянутую константу.
Блок 204 определения движения также может определять, движется ли объект, путем сравнения значения евклидовой нормы линейного ускорения объекта с одним адаптивным порогом методом скользящего окна и сравнения значения евклидовой нормы угловой скорости объекта с другим адаптивным порогом методом скользящего окна. Способ упомянутого сравнения с адаптивными порогами и способ вычисления адаптивных порогов методом скользящего окна заданы в первой интеллектуальной модели изменения движения объекта.
Блок 204 определения движения вычисляет адаптивный порог и сравнивает с ним евклидовую норму линейного ускорения объекта итеративно. Для этого блок 204 определения движения устанавливает адаптивный порог, причем предварительно считается, что объект не движется, и адаптивный порог вычислен заранее. Затем блок 204 определения движения принимает заданный порог для определения движения и заданный порог для определения отсутствия движения и сравнивает значение нормы линейного ускорения объекта с адаптивным порогом. Порог для определения движения и порог для определения отсутствия движения заданы в первой интеллектуальной модели изменения движения объекта на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект. Если значение нормы линейного ускорения объекта не превышает адаптивный порог, то определяется, что объект не движется. Если значение нормы линейного ускорения объекта превышает адаптивный порог, то определяется длительность, как долго значение нормы линейного ускорения объекта превышает адаптивный порог. Если длительность нахождения значения нормы линейного ускорения объекта более адаптивного порога превышает порог для определения движения, то определяется, что объект движется, при этом адаптивный порог не изменяется. Если длительность нахождения значения нормы линейного ускорения объекта более адаптивного порога не превышает порог для определения движения, то определяется, что объект не движется. Если определено, что объект не движется, блок 204 определения движения перерассчитывает текущий адаптивный порог путем вычисления среднего взвешенного значений линейного ускорения объекта в скользящем окне, а затем присваивает текущему значению адаптивного порога максимальное значение между текущим значением адаптивного порога и максимальным значением между вычисленными средним взвешенным значением и максимальным значением ковариационной матрицы. Если определено, что объект движется, блок 204 определения движения сравнивает значение нормы линейного ускорения объекта с адаптивным порогом. Если значение нормы линейного ускорения объекта превышает адаптивный порог, то блок 204 определения движения определяет, что объект продолжает движение. Если значение нормы линейного ускорения объекта не превышает адаптивный порог, то блок 204 определения движения определяет завершение движения путем сравнения длительности, как долго значение нормы линейного ускорения объекта меньше порога для определения отсутствия движения, и если длительность нахождения менее адаптивного порога превышает порог для определения отсутствия движения, то блок 204 определения движения определяет, что объект не движется, при этом адаптивный порог пересчитывается в соответствии с нормой входных значений линейного ускорения объекта. Адаптивный порог вычисляется как усредненное по множеству различный тестовых данных значение нормы линейного ускорения объектов одного того же типа, при котором однозначно выявлено движение.
Блок 204 определения движения также может содержать по меньшей мере одну предварительно обученную рекуррентную нейронную сеть и определять, движется ли объект, с использованием по меньшей мере одной предварительно обученной рекуррентной нейронной сети в качестве первой интеллектуальной модели изменения движения объекта.
Блок 204 определения движения также может содержать каскад предварительно обученных рекуррентных нейронных сетей и определять, движется ли объект, с использованием каскада предварительно обученных рекуррентных нейронных сетей в качестве первой интеллектуальной модели изменения движения объекта.
Каждая рекуррентная нейронная сеть может представлять собой долгую краткосрочную память (LSTM).
Блок 205 определения пространственной позиции определяет текущую пространственную позицию объекта при определении наличия движения объекта посредством определения вектора направления движения объекта посредством вычисления среднего значения значений линейного ускорения объекта в глобальной системе координат методом скользящего окна и привязки этого среднего значения к системе координат, в которой вертикальная ось параллельна вектору ускорения свободного падения, оценки скорости объекта на основании значений линейного ускорения объекта с использованием второй интеллектуальной модели движения объекта, проецирования оцененной скорости объекта на определенный вектор направления движения объекта и получения текущей пространственной позиции объекта методом численного интегрирования.
Блок 205 определения пространственной позиции может определять вектор направления движения объекта методом опорных векторов (SVM).
Блок 205 определения пространственной позиции может содержать предварительно обученную рекуррентную нейронную сеть и определять вектор направления движения объекта с использованием предварительно обученной рекуррентной нейронной сети.
Блок 205 определения пространственной позиции может оценивать линейную скорость объекта на основании значений линейного ускорения объекта с использованием полиномиальной модели скорости в качестве второй интеллектуальной модели движения объекта.
Блок 205 определения пространственной позиции может содержать предварительно обученную рекуррентную нейронную сеть и оценивать линейную скорость объекта на основании значений линейного ускорения объекта с использованием предварительно обученной рекуррентной нейронной сети в качестве второй интеллектуальной модели движения объекта.
Блок 205 определения пространственной позиции может содержать комбинацию предварительно обученных моделей и оценивать линейную скорость объекта на основании значений линейного ускорения объекта с использованием комбинации предварительно обученных моделей в качестве второй интеллектуальной модели движения объекта.
В устройство бесплатформенной инерциальной навигации могут поступать значения линейного ускорения объекта, значения угловой скорости объекта, значения температуры и значения напряженности магнитного поля, измеренные более чем одним инерциальным датчиком.
При поступлении данных от более чем одного инерциального датчика блок 203 определения пространственной ориентации независимо определяет текущую пространственную ориентацию объекта на основании значений, измеренных каждым датчиком, и вычисляет результирующую текущую пространственную ориентацию объекта на основании всех текущих пространственных ориентаций объекта, определенных независимо на основании принятых значений с разных инерциальных датчиков. Блок 205 определения пространственной позиции независимо определяет текущую пространственную позицию объекта на основании значений, измеренных каждым датчиком, и вычисляет результирующую текущую пространственную позицию объекта на основании всех текущих пространственных позиций объекта, определенных независимо на основании принятых значений с разных инерциальных датчиков.
При поступлении данных от более чем одного инерциального датчика блок 203 определения пространственной ориентации может вычислять результирующую текущую пространственную ориентацию объекта посредством взвешенного усреднения текущих пространственных ориентаций объекта, определенных независимо на основании значений, измеренных разными инерциальными датчиками; и блок 205 определения пространственной позиции может вычислять результирующую текущую пространственную позицию объекта посредством взвешенного усреднения текущих пространственных позиций объекта, определенных независимо на основании принятых значений, измеренных разными инерциальными датчиками.
На фиг. 6 приведена блок-схема, иллюстрирующая применение изобретения в качестве устройства распознавания и аутентификации пользователя по конкретным образцам человеческого движения. Устройство распознавания и аутентификации пользователя содержит блок 201 коррекции по температуре, блок 202 коррекции по магнитному полю, блок 203 определения пространственной ориентации, блок 204 определения движения и блок 205 определения пространственной позиции, которые полностью соответствуют блокам 201-205, описанным выше. Кроме того, устройство распознавания и аутентификации пользователя может содержать описанный выше фильтр 206.
Устройство распознавания и аутентификации пользователя дополнительно содержит блок 207 выделения вектора признаков движения объекта. Полученные в блоке 203 значения пространственной ориентации объекта и полученные в блоке 205 значения пространственной позиции объекта поступают в блок 207 выделения вектора признаков движения объекта, который осуществляет распознавание и аутентификацию пользователя по конкретным образцам человеческого движения.
На фиг. 7 приведена блок-схема, иллюстрирующая применение изобретения в качестве системы автоматического регулирования движения транспортного средства («круиз контроль»). Система автоматического регулирования движения транспортного средства содержит блок 201 коррекции по температуре, блок 202 коррекции по магнитному полю, блок 203 определения пространственной ориентации, блок 204 определения движения и блок 205 определения пространственной позиции, которые полностью соответствуют блокам 201-205, описанным выше. Кроме того, система автоматического регулирования движения транспортного средства может содержать описанный выше фильтр 206.
Система автоматического регулирования движения транспортного средства дополнительно содержит блок 208 коррекции движения транспортного средства. Полученные в блоке 203 значения пространственной ориентации объекта и полученные в блоке 205 значения пространственной позиции объекта поступают в блок 208 коррекции движения транспортного средства, который осуществляет уточнение движения транспортного средства с использованием дополнительных значений пространственной позиции и пространственной ориентации, полученных с внешних независимых датчиков, таких как камера, датчик системы глобальной навигации и т.п., с целью предупреждения нештатной аварийной ситуации транспортного средства.
На фиг. 8 приведена блок-схема, иллюстрирующая применение изобретения в качестве системы автоматического регулирования движения любого транспортного средства в 3-мерном пространстве, включая беспилотные варианты. Система автоматического регулирования движения транспортного средства в 3-мерном пространстве содержит блок 201 коррекции по температуре, блок 202 коррекции по магнитному полю, блок 203 определения пространственной ориентации, блок 204 определения движения и блок 205 определения пространственной позиции, которые полностью соответствуют блокам 201-205, описанным выше. Кроме того, система автоматического регулирования движения транспортного средства может содержать описанный выше фильтр 206.
Система автоматического регулирования движения транспортного средства в 3-мерном пространстве дополнительно содержит блок 209 коррекции 3-мерного движения транспортного средства. Полученные в блоке 203 значения пространственной ориентации объекта и полученные в блоке 205 значения пространственной позиции объекта поступают в блок 209 коррекции 3-мерного движения транспортного средства, который выполняет коррекцию 3-мерного движения транспортного средства с использованием дополнительных значений пространственной позиции и пространственной ориентации, полученных с внешних независимых датчиков, таких как камера, датчик системы глобальной навигации и т.п., с целью предупреждения нештатной аварийной ситуации транспортного средства.
Вышеприведенные описания вариантов осуществления изобретения являются иллюстративными, и модификации конфигурации и реализации не выходят за пределы объема настоящего описания. Например, хотя варианты осуществления изобретения описаны, в общем, в связи с фигурами 1-8, приведенные описания являются примерными. Хотя предмет изобретения описан на языке, характерном для конструктивных признаков или методологических операций, понятно, что предмет изобретения, определяемый прилагаемой формулой изобретения, не обязательно ограничен конкретными вышеописанными признаками или операциями. Более того, конкретные вышеописанные признаки и операции раскрыты как примерные формы реализации формулы изобретения.
Соответственно предполагается, что объем изобретения ограничивается только нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |

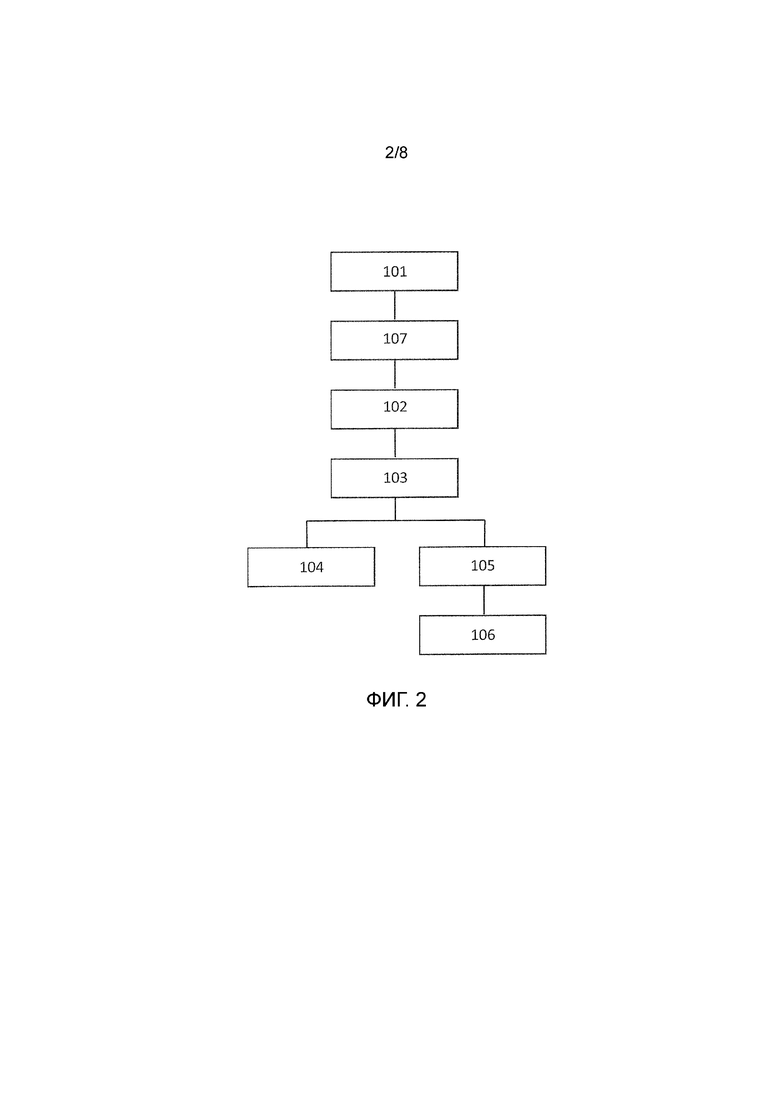
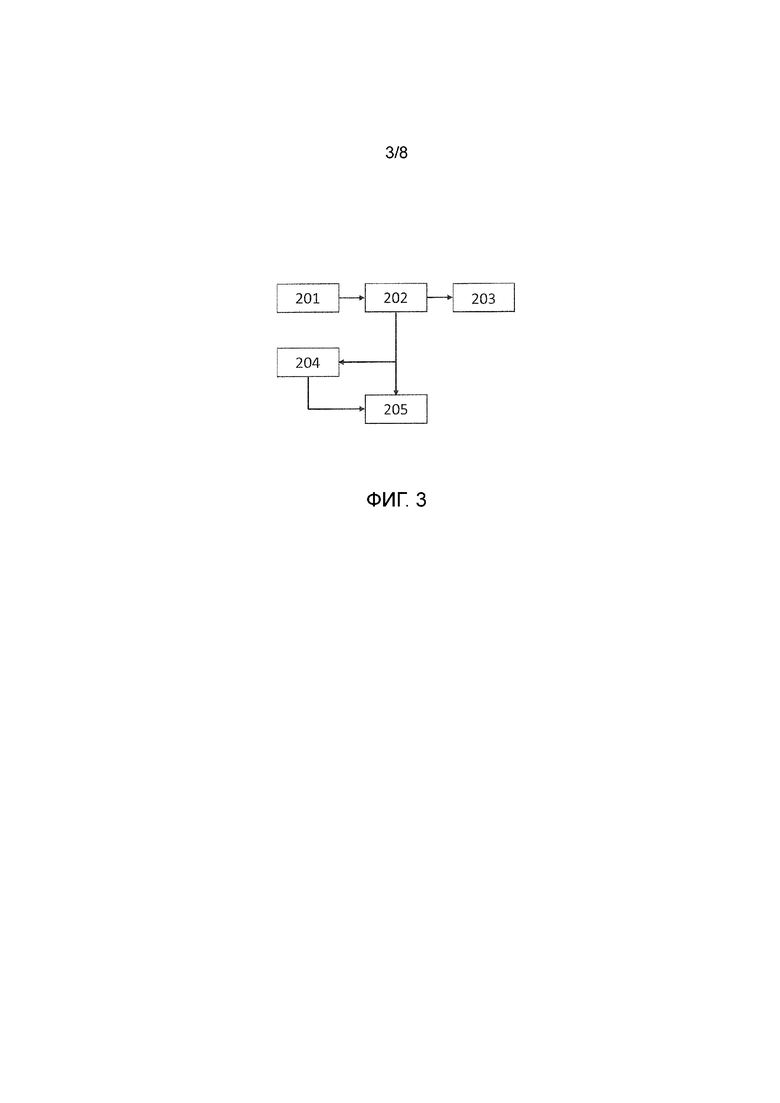

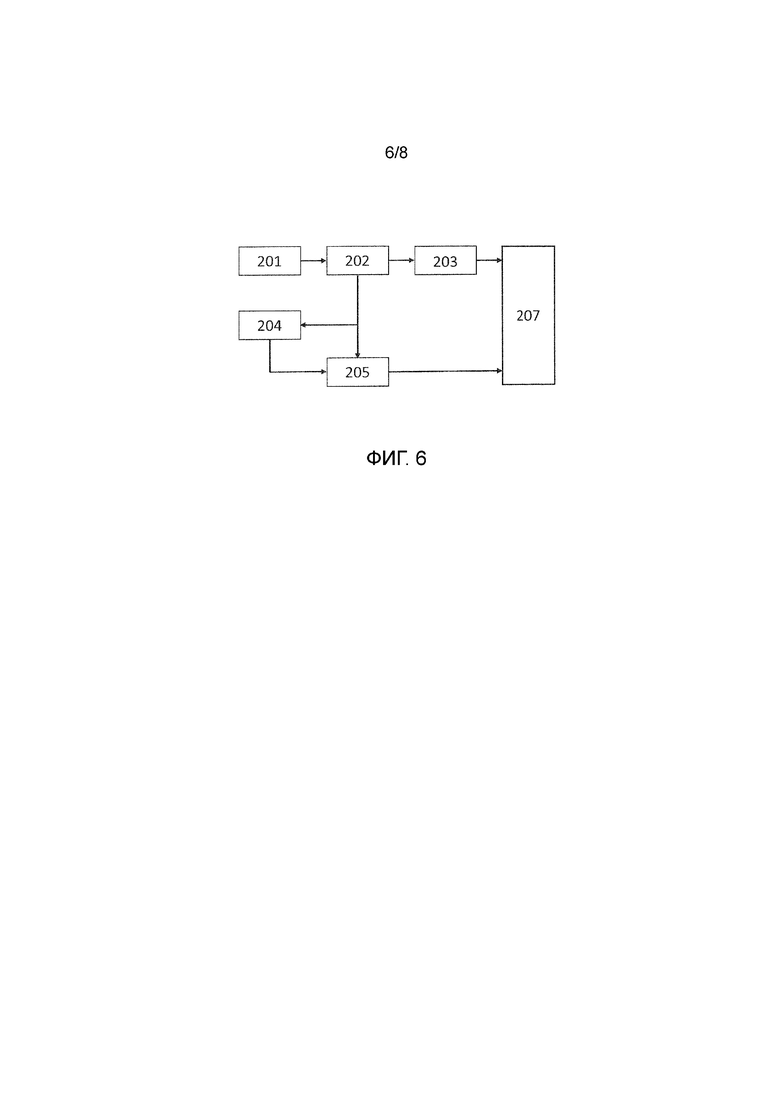
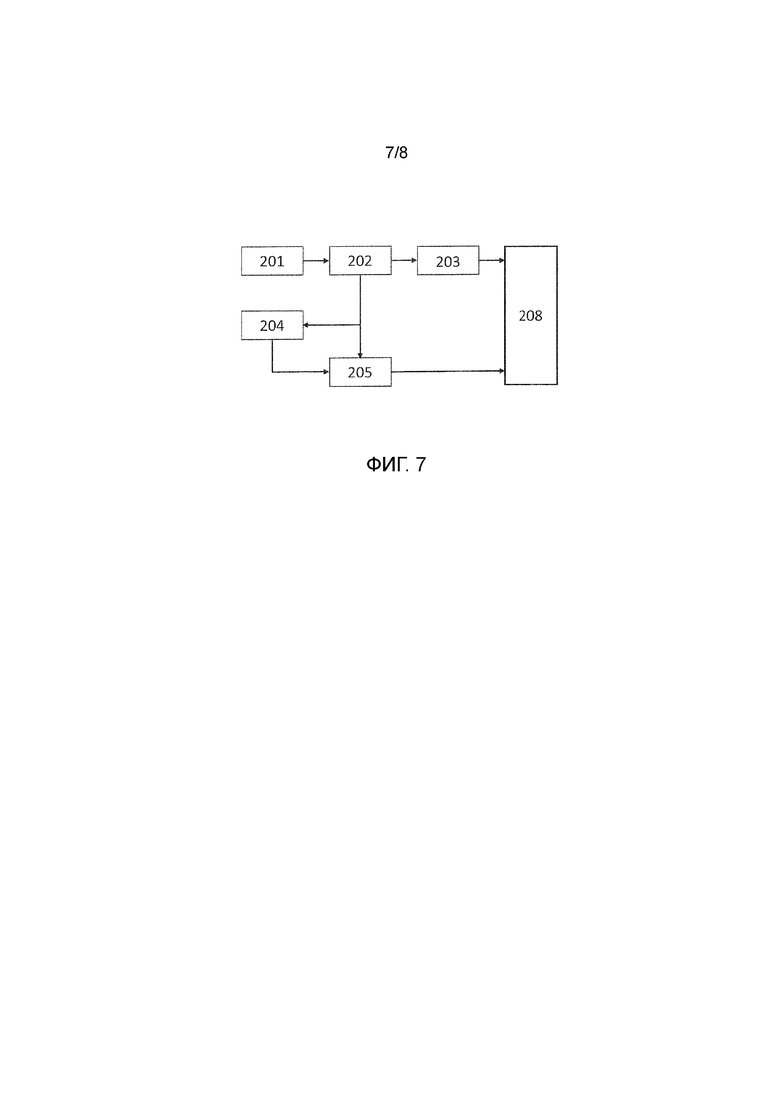
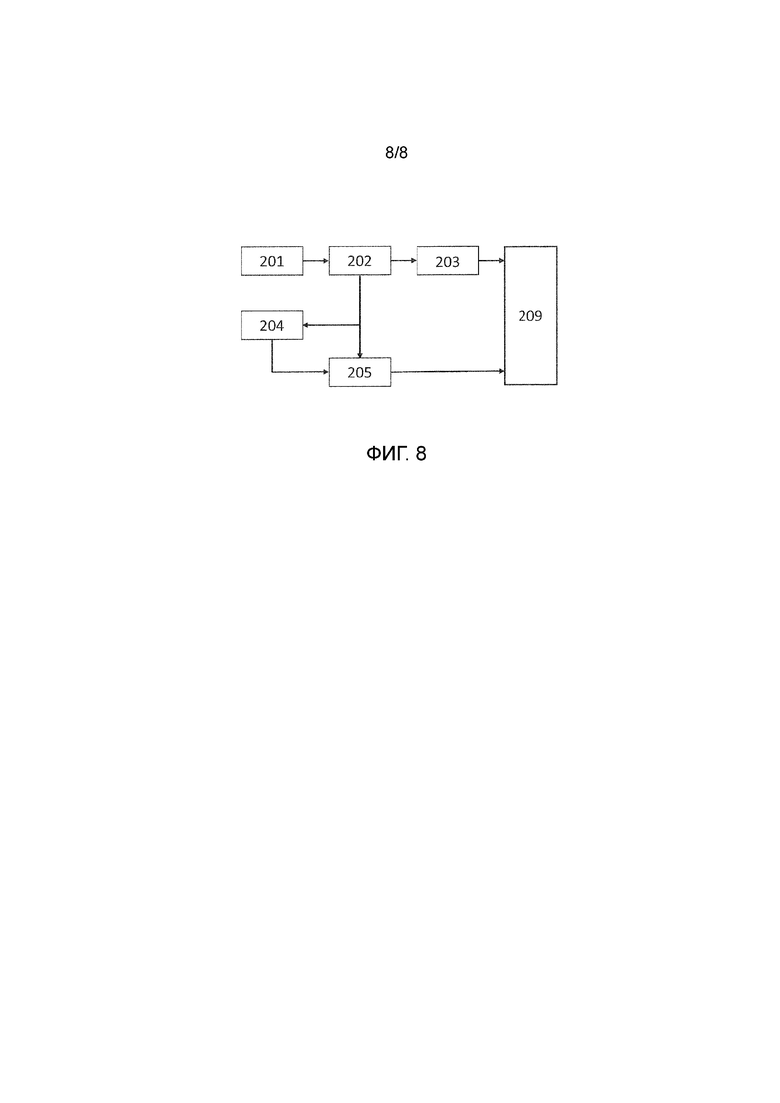
Настоящее изобретение относится к бесплатформенной инерциальной навигации. Предложены способ и устройство бесплатформенной инерциальной навигации с использованием измерений, выполненных одним или более инерциальным датчиком. Способ бесплатформенной инерциальной навигации содержит этапы, на которых: принимают значения линейного ускорения объекта, значения угловой скорости объекта, значения температуры инерциального датчика и значения напряженности магнитного поля, измеренные одним инерциальным датчиком, затем выполняют коррекцию принятых значений угловой скорости объекта на поправочный коэффициент для текущего значения температуры и выполняют коррекцию принятых значений угловой скорости объекта на поправочный коэффициент. Определяют текущую пространственную ориентацию объекта на основании угловой скорости объекта; определяют, движется ли объект, на основании значений линейного ускорения объекта и значений угловой скорости объекта с использованием предварительно полученной первой интеллектуальной модели изменения движения объекта и при определении наличия движения объекта определяют текущую пространственную позицию объекта на основании значений линейного ускорения объекта и значений угловой скорости объекта с использованием предварительно полученной второй интеллектуальной модели движения объекта, а при определении отсутствия движения объекта задают текущую пространственную позицию объекта равной предыдущей пространственной позиции объекта. Технический результат - определение пространственной позиции и ориентации объекта на основании зашумленных и искаженных измерений, выполненных одним инерциальным датчиком, без необходимости в согласовании с внешними ориентирами и/или использовании поступающих извне данных в условиях произвольного пространственного перемещения объекта. 2 н. и 40 з.п. ф-лы, 8 ил.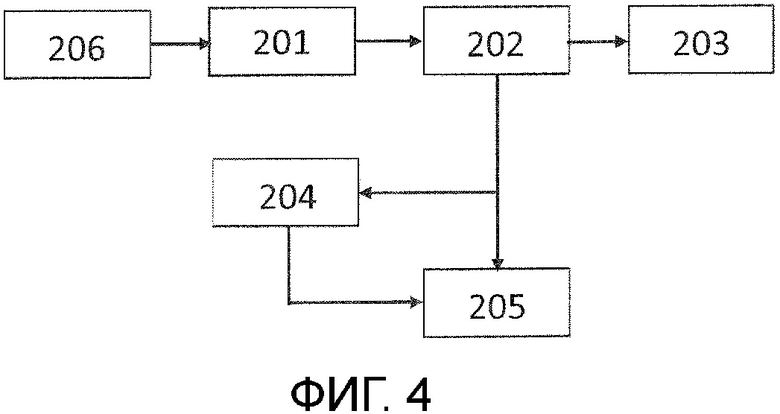
1. Способ бесплатформенной инерциальной навигации, содержащий этапы, на которых:
принимают значения линейного ускорения объекта, измеренные акселерометром инерциального датчика, значения угловой скорости объекта, измеренные гироскопом инерциального датчика, значения температуры инерциального датчика, измеренные термометром инерциального датчика, и значения напряженности магнитного поля, измеренные магнетометром инерциального датчика, причем значения линейного ускорения объекта, значения угловой скорости объекта, значения температуры инерциального датчика и значения напряженности магнитного поля, воздействующего на магнетометр инерциального датчика, измерены по меньшей мере одним инерциальным датчиком;
если выявлено отклонение нулевой угловой скорости гироскопа инерциального датчика, выполняют коррекцию принятых значений угловой скорости объекта на поправочный коэффициент для текущего значения температуры, причем набор поправочных коэффициентов для каждого значения рабочей температуры инерциального датчика получен заранее;
если выявлено изменение напряженности магнитного поля, выполняют коррекцию принятых значений угловой скорости объекта на поправочный коэффициент, причем значение поправочного коэффициента вычисляется как решение оптимизационной задачи;
определяют текущую пространственную ориентацию объекта на основании принятых значений угловой скорости, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или скорректированных значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля;
определяют, движется ли объект, на основании принятых значений линейного ускорения объекта и принятых значений угловой скорости объекта, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или на основании принятых значений линейного ускорения объекта и скорректированных значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, с использованием предварительно полученной первой интеллектуальной модели изменения движения объекта, причем первая интеллектуальная модель изменения движения объекта получена заранее на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект; и
при определении наличия движения объекта определяют текущую пространственную позицию объекта на основании принятых значений линейного ускорения объекта и принятых значений угловой скорости объекта, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или на основании принятых значений линейного ускорения объекта и скорректированных значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, с использованием предварительно полученной второй интеллектуальной модели движения объекта, причем вторая интеллектуальная модель движения объекта получена заранее на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект, а при определении отсутствия движения объекта задают текущую пространственную позицию объекта равной предыдущей пространственной позиции объекта.
2. Способ по п. 1, дополнительно содержащий этап, на котором фильтруют принятые значения линейного ускорения объекта и принятые значения угловой скорости объекта для подавления шума,
при этом фильтрацию принятых значений линейного ускорения объекта и принятых значений угловой скорости объекта выполняют посредством взвешенного усреднения методом скользящего окна.
3. Способ по п. 1, в котором получение поправочного коэффициента для каждого значения рабочей температуры инерциального датчика содержит этапы, на которых:
определяют, движется ли объект, на основании значений линейного ускорения объекта и значений угловой скорости объекта с использованием предварительно полученной первой интеллектуальной модели изменения движения объекта;
если определено, что объект не движется, формируют набор принятых значений угловой скорости объекта для текущего значения рабочей температуры инерциального датчика, причем оптимальное количество принятых значений угловой скорости объекта в упомянутом наборе определяется на основании оптимизации соотношения смещения среднего значения угловой скорости объекта и величины разброса значений угловой скорости объекта;
усредняют принятые значения угловой скорости объекта упомянутого набора методом взвешенного среднего и вычисляют поправочный коэффициент для текущего значения рабочей температуры инерциального датчика посредством решения регрессионного уравнения,
при этом формирование набора принятых значений угловой скорости объекта и вычисление поправочного коэффициента выполняют для каждого значения рабочей температуры инерциального датчика.
4. Способ по п. 3, в котором оптимальное количество принятых значений угловой скорости объекта в упомянутом наборе определяется методом пересечения доверительных интервалов.
5. Способ по п. 1, в котором вычисление поправочных коэффициентов для принятого значения напряженности магнитного поля для коррекций принятых значений угловой скорости объекта по изменению напряженности магнитного поля содержит этапы, на которых:
принимают значения напряженности магнитного поля, модель распределения напряженности магнитного поля и предварительные калибровочные параметры магнетометра инерциального датчика, причем модель распределения напряженности магнитного поля и калибровочные параметры вычислены заранее;
производится корректировка принятых значений напряженности магнитного поля с использованием калибровочных параметров магнетометра;
если скорректированные значения напряженности магнитного поля удовлетворяют диапазону из принятой модели распределения напряженности магнитного поля, производится расчет поправочных коэффициентов принятых значений угловой скорости объекта как мера отклонения текущего вектора напряженности от значения упомянутой модели, если скорректированные значения напряженности магнитного поля не удовлетворяют диапазону из принятой модели распределения напряженности магнитного поля, производится перерасчет калибровочных параметров как задача ортогонализации и минимизации смещения среднего значения напряженности и кросс-корреляции между осями.
6. Способ по п. 1, в котором текущую пространственную ориентацию объекта вычисляют методом численного интегрирования.
7. Способ по п. 1 или 3, в котором определение, движется ли объект, выполняют путем сравнения значения евклидовой нормы угловой скорости объекта с одной константой и сравнения значения евклидовой нормы линейного ускорения объекта с другой константой, причем упомянутые сравнения с константами заданы в первой интеллектуальной модели изменения движения объекта,
при этом определяют, что объект не движется, если значение евклидовой нормы угловой скорости объекта и значение евклидовой нормы линейного ускорения объекта не превышают упомянутую константу, и определяют, что объект движется, если значение евклидовой нормы угловой скорости объекта и значение евклидовой нормы линейного ускорения объекта превышают упомянутую константу.
8. Способ по п. 1 или 3, в котором определение, движется ли объект, осуществляется путем сравнения значения евклидовой нормы линейного ускорения объекта с одним адаптивным порогом методом скользящего окна и сравнения значения евклидовой нормы угловой скорости объекта с другим адаптивным порогом методом скользящего окна, причем способ упомянутого сравнения с адаптивными порогами и способ вычисления адаптивных порогов методом скользящего окна заданы в первой интеллектуальной модели изменения движения объекта.
9. Способ по п.8, в котором вычисление адаптивного порога и сравнение с ним евклидовой нормы линейного ускорения объекта производится итеративно и содержит этапы, на которых:
устанавливают адаптивный порог, причем предварительно считается, что объект не движется и адаптивный порог вычислен заранее;
принимают заданный порог для определения движения и заданный порог для определения отсутствия движения;
производят сравнение значения нормы линейного ускорения объекта с адаптивным порогом, и если значение нормы линейного ускорения объекта не превышает адаптивный порог, то определяют, что объект не движется;
если значение нормы линейного ускорения объекта превышает адаптивный порог, то определяют длительность, как долго значение нормы линейного ускорения объекта превышает адаптивный порог;
если длительность нахождения значения нормы линейного ускорения объекта более адаптивного порога превышает порог для определения движения, то определяют, что объект движется, при этом адаптивный порог не изменяется;
если длительность нахождения значения нормы линейного ускорения объекта более адаптивного порога не превышает порог для определения движения, то определяют, что объект не движется;
если определено, что объект не движется, производят перерасчет текущего адаптивного порога путем вычисления среднего взвешенного значений линейного ускорения объекта в скользящем окне, а затем присвоения текущему значению адаптивного порога максимального значения между текущим значением адаптивного порога и максимальным значением между вычисленными средним взвешенным значением и максимальным значением ковариационной матрицы;
если определено, что объект движется, сравнивают значение нормы линейного ускорения объекта с адаптивным порогом, и
если значение нормы линейного ускорения объекта превышает адаптивный порог, то определяют, что объект продолжает движение;
если значение нормы линейного ускорения объекта не превышает адаптивный порог, то завершение движения определяют путем сравнения длительности, как долго значение нормы линейного ускорения объекта меньше порога для определения отсутствия движения, и если длительность нахождения менее адаптивного порога превышает порог для определения отсутствия движения, то определяют, что объект не движется, при этом адаптивный порог пересчитывают в соответствии с нормой входных значений линейного ускорения объекта.
10. Способ по п. 9, в котором адаптивный порог вычисляют как усредненное по множеству различный тестовых данных значение нормы линейного ускорения объектов одного того же типа, при котором однозначно выявлено движение.
11. Способ по п. 1 или 3, в котором определение, движется ли объект, осуществляется с использованием по меньшей мере одной предварительно обученной рекуррентной нейронной сети в качестве первой интеллектуальной модели изменения движения объекта.
12. Способ по п. 11, в котором определение, движется ли объект, осуществляется с использованием каскада предварительно обученных рекуррентных нейронных сетей в качестве первой интеллектуальной модели изменения движения объекта.
13. Способ по п. 11 или 12, в котором каждая рекуррентная нейронная сеть представляет собой долгую краткосрочную память (LSTM).
14. Способ по п. 1, в котором определение текущей пространственной позиции объекта при определении наличия движения объекта содержит этапы, на которых:
определяют вектор направления движения объекта посредством вычисления среднего значения значений линейного ускорения объекта в глобальной системе координат методом скользящего окна и привязки этого среднего значения к системе координат, в которой вертикальная ось параллельна вектору ускорения свободного падения;
оценивают скорость объекта на основании значений линейного ускорения объекта с использованием второй интеллектуальной модели движения объекта;
проецируют оцененную скорость объекта на определенный вектор направления движения объекта и получают текущую пространственную позицию объекта методом численного интегрирования.
15. Способ по п. 14, в котором определяют вектор направления движения объекта методом опорных векторов (SVM).
16. Способ по п. 14, в котором определяют вектор направления движения объекта с использованием предварительно обученной рекуррентной нейронной сети.
17. Способ по любому из пп. 14-16, в котором оценивают линейную скорость объекта на основании значений линейного ускорения объекта с использованием полиномиальной модели скорости в качестве второй интеллектуальной модели движения объекта.
18. Способ по любому из пп. 14-16, в котором оценивают линейную скорость объекта на основании значений линейного ускорения объекта с использованием предварительно обученной рекуррентной нейронной сети в качестве второй интеллектуальной модели движения объекта.
19. Способ по любому из пп. 14-16, в котором оценивают линейную скорость объекта на основании значений линейного ускорения объекта с использованием комбинации предварительно обученных моделей в качестве второй интеллектуальной модели движения объекта.
20. Способ по п. 1, в котором, если принимают значения линейного ускорения объекта, значения угловой скорости объекта, значения температуры и значения напряженности магнитного поля, измеренные более чем одним инерциальным датчиком, то независимо определяют текущую пространственную ориентацию объекта на основании принятых значений, измеренных каждым датчиком, и независимо определяют текущую пространственную позицию объекта на основании принятых значений, измеренных каждым датчиком,
при этом упомянутый способ дополнительно содержит этапы, на которых:
вычисляют результирующую текущую пространственную ориентацию объекта на основании всех текущих пространственных ориентаций объекта, определенных независимо на основании принятых значений с разных инерциальных датчиков; и
вычисляют результирующую текущую пространственную позицию объекта на основании всех текущих пространственных позиций объекта, определенных независимо на основании принятых значений с разных инерциальных датчиков.
21. Способ по п. 20, в котором вычисление результирующих значений текущей пространственной ориентации объекта и вычисление текущей пространственной позиции объекта производятся посредством взвешенного усреднения текущих пространственных ориентаций объекта и текущих пространственных позиций объекта, определенных независимо на основании принятых значений, измеренных разными инерциальными датчиками.
22. Устройство бесплатформенной инерциальной навигации, содержащее:
блок коррекции по температуре, выполненный с возможностью, если выявлено отклонение нулевой угловой скорости гироскопа инерциального датчика, выполнения коррекции значений угловой скорости объекта на поправочный коэффициент для текущего значения температуры, причем набор поправочных коэффициентов для каждого значения рабочей температуры инерциального датчика получен заранее;
блок коррекции по магнитному полю, выполненный с возможностью, если выявлено изменение напряженности магнитного поля, выполнения коррекции значений угловой скорости объекта на поправочный коэффициент, причем значение поправочного коэффициента вычисляется как решение оптимизационной задачи;
блок определения пространственной ориентации, выполненный с возможностью определения текущей пространственной ориентации объекта на основании значений угловой скорости, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или скорректированных значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля;
блок определения движения, выполненный с возможностью определения, движется ли объект, на основании значений линейного ускорения объекта и значений угловой скорости объекта, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или на основании значений линейного ускорения объекта и скорректированных значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, с использованием предварительно полученной первой интеллектуальной модели изменения движения объекта, причем первая интеллектуальная модель изменения движения объекта получена заранее на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект; и
блок определения пространственной позиции, выполненный с возможностью, при определении наличия движения объекта, определения текущей пространственной позиции объекта на основании значений линейного ускорения объекта и значений угловой скорости объекта, если не выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, или на основании значений линейного ускорения объекта и скорректированных значений угловой скорости объекта, если выявлено отклонение нулевой угловой скорости и/или изменение напряженности магнитного поля, с использованием предварительно полученной второй интеллектуальной модели движения объекта, причем вторая интеллектуальная модель движения объекта получена заранее на основании характерных особенностей движения по меньшей мере одного объекта того же типа, что и упомянутый объект, а при определении отсутствия движения объекта, задания текущей пространственной позиции объекта равной предыдущей пространственной позиции объекта,
при этом значения линейного ускорения объекта измерены акселерометром инерциального датчика, значения угловой скорости объекта измерены гироскопом инерциального датчика, значения температуры инерциального датчика измерены термометром инерциального датчика и значения напряженности магнитного поля измерены магнетометром инерциального датчика, причем значения линейного ускорения объекта, значения угловой скорости объекта, значения температуры инерциального датчика и значения напряженности магнитного поля, воздействующего на магнетометр инерциального датчика, измерены по меньшей мере одним инерциальным датчиком.
23. Устройство по п. 22, дополнительно содержащее фильтр, выполненный с возможностью фильтрации значений линейного ускорения объекта и значений угловой скорости объекта для подавления шума,
при этом фильтрацию значений линейного ускорения объекта и значений угловой скорости объекта выполняют посредством взвешенного усреднения методом скользящего окна.
24. Устройство по п. 22, в котором блок коррекции по температуре получает поправочный коэффициент для каждого значения рабочей температуры инерциального датчика посредством:
если определено, что объект не движется,
формирования набора значений угловой скорости объекта для текущего значения рабочей температуры инерциального датчика, причем оптимальное количество значений угловой скорости объекта в упомянутом наборе определяется на основании оптимизации соотношения смещения среднего значения угловой скорости объекта и величины разброса значений угловой скорости объекта;
усреднения значений угловой скорости объекта упомянутого набора методом взвешенного среднего и вычисления поправочного коэффициента для текущего значения рабочей температуры инерциального датчика посредством решения регрессионного уравнения,
при этом формирование набора значений угловой скорости объекта и вычисление поправочного коэффициента выполняют для каждого значения рабочей температуры инерциального датчика.
25. Устройство по п. 24, в котором оптимальное количество значений угловой скорости объекта в упомянутом наборе определяется методом пересечения доверительных интервалов.
26. Устройство по п. 22, в котором блок коррекции по магнитному полю вычисляет поправочные коэффициенты для значения напряженности магнитного поля для коррекций значений угловой скорости объекта по изменению напряженности магнитного поля посредством:
корректировки значений напряженности магнитного поля с использованием калибровочных параметров магнетометра;
если скорректированные значения напряженности магнитного поля удовлетворяют диапазону из модели распределения напряженности магнитного поля, расчета поправочных коэффициентов значений угловой скорости объекта как меры отклонения текущего вектора напряженности от значения упомянутой модели, если скорректированные значения напряженности магнитного поля не удовлетворяют диапазону из модели распределения напряженности магнитного поля, перерасчета калибровочных параметров как задачи ортогонализации и минимизации смещения среднего значения напряженности и кросс-корреляции между осями,
причем модель распределения напряженности магнитного поля и калибровочные параметры вычислены заранее.
27. Устройство по п. 22, в котором блок определения пространственной ориентации определяет текущую пространственную ориентацию объекта посредством вычисления методом численного интегрирования.
28. Устройство по п. 22 или 24, в котором блок определения движения определяет, движется ли объект, путем сравнения значения евклидовой нормы угловой скорости объекта с одной константой и сравнения значения евклидовой нормы линейного ускорения объекта с другой константой, причем упомянутые сравнения с константами заданы в первой интеллектуальной модели изменения движения объекта,
при этом определено, что объект не движется, если значение евклидовой нормы угловой скорости объекта и значение евклидовой нормы линейного ускорения объекта не превышают упомянутую константу, и определено, что объект движется, если значение евклидовой нормы угловой скорости объекта и значение евклидовой нормы линейного ускорения объекта превышают упомянутую константу.
29. Устройство по п. 22 или 24, в котором блок определения движения определяет, движется ли объект, путем сравнения значения евклидовой нормы линейного ускорения объекта с одним адаптивным порогом методом скользящего окна и сравнения значения евклидовой нормы угловой скорости объекта с другим адаптивным порогом методом скользящего окна, причем способ упомянутого сравнения с адаптивными порогами и способ вычисления адаптивных порогов методом скользящего окна заданы в первой интеллектуальной модели изменения движения объекта.
30. Устройство по п.29, в котором вычисление адаптивного порога и сравнение с ним евклидовой нормы линейного ускорения объекта производится итеративно посредством:
установления адаптивного порога, причем предварительно считается, что объект не движется и адаптивный порог вычислен заранее;
приема заданного порога для определения движения и заданного порога для определения отсутствия движения;
сравнения значения нормы линейного ускорения объекта с адаптивным порогом, и если значение нормы линейного ускорения объекта не превышает адаптивный порог, то определяется, что объект не движется;
если значение нормы линейного ускорения объекта превышает адаптивный порог, то определяется длительность, как долго значение нормы линейного ускорения объекта превышает адаптивный порог;
если длительность нахождения значения нормы линейного ускорения объекта более адаптивного порога превышает порог для определения движения, то определяется, что объект движется, при этом адаптивный порог не изменяется;
если длительность нахождения значения нормы линейного ускорения объекта более адаптивного порога не превышает порог для определения движения, то определяется, что объект не движется;
если определено, что объект не движется, перерасчета текущего адаптивного порога путем вычисления среднего взвешенного значений линейного ускорения объекта в скользящем окне, а затем присвоения текущему значению адаптивного порога максимального значения между текущим значением адаптивного порога и максимальным значением между вычисленными средним взвешенным значением и максимальным значением ковариационной матрицы;
если определено, что объект движется, сравнения значения нормы линейного ускорения объекта с адаптивным порогом, и
если значение нормы линейного ускорения объекта превышает адаптивный порог, то определяется, что объект продолжает движение;
если значение нормы линейного ускорения объекта не превышает адаптивный порог, то завершение движения определяется путем сравнения длительности, как долго значение нормы линейного ускорения объекта меньше порога для определения отсутствия движения, и если длительность нахождения менее адаптивного порога превышает порог для определения отсутствия движения, то определяется, что объект не движется, при этом адаптивный порог пересчитывают в соответствии с нормой входных значений линейного ускорения объекта.
31. Устройство по п. 30, в котором адаптивный порог вычисляется как усредненное по множеству различный тестовых данных значение нормы линейного ускорения объектов одного того же типа, при котором однозначно выявлено движение.
32. Устройство по п. 22 или 24, в котором блок определения движения определяет, движется ли объект, с использованием по меньшей мере одной предварительно обученной рекуррентной нейронной сети в качестве первой интеллектуальной модели изменения движения объекта.
33. Устройство по п. 32, в котором блок определения движения определяет, движется ли объект, с использованием каскада предварительно обученных рекуррентных нейронных сетей в качестве первой интеллектуальной модели изменения движения объекта.
34. Устройство по п. 32 или 33, в котором каждая рекуррентная нейронная сеть представляет собой долгую краткосрочную память (LSTM).
35. Устройство по п. 22, в котором блок определения пространственной позиции определяет текущую пространственную позицию объекта при определении наличия движения объекта посредством:
определения вектора направления движения объекта посредством вычисления среднего значения значений линейного ускорения объекта в глобальной системе координат методом скользящего окна и привязки этого среднего значения к системе координат, в которой вертикальная ось параллельна вектору ускорения свободного падения;
оценки скорости объекта на основании значений линейного ускорения объекта с использованием второй интеллектуальной модели движения объекта;
проецирования оцененной скорости объекта на определенный вектор направления движения объекта и получения текущей пространственной позиции объекта методом численного интегрирования.
36. Устройство по п. 35, в котором определение вектора направления движения объекта выполняется методом опорных векторов (SVM).
37. Устройство по п. 35, в котором определение вектора направления движения объекта выполняется с использованием предварительно обученной рекуррентной нейронной сети.
38. Устройство по любому из пп. 35-37, в котором оценка линейной скорости объекта на основании значений линейного ускорения объекта выполняется с использованием полиномиальной модели скорости в качестве второй интеллектуальной модели движения объекта.
39. Устройство по любому из пп. 35-37, в котором оценка линейной скорости объекта на основании значений линейного ускорения объекта выполняется с использованием предварительно обученной рекуррентной нейронной сети в качестве второй интеллектуальной модели движения объекта.
40. Устройство по любому из пп. 35-37, в котором оценка линейной скорости объекта на основании значений линейного ускорения объекта выполняется с использованием комбинации предварительно обученных моделей в качестве второй интеллектуальной модели движения объекта.
41. Устройство по п. 22, в котором, если значения линейного ускорения объекта, значения угловой скорости объекта, значения температуры и значения напряженности магнитного поля измерены более чем одним инерциальным датчиком, то
блок определения пространственной ориентации независимо определяет текущую пространственную ориентацию объекта на основании значений, измеренных каждым датчиком, и вычисляет результирующую текущую пространственную ориентацию объекта на основании всех текущих пространственных ориентаций объекта, определенных независимо на основании принятых значений с разных инерциальных датчиков, и
блок определения пространственной позиции независимо определяет текущую пространственную позицию объекта на основании значений, измеренных каждым датчиком, и вычисляет результирующую текущую пространственную позицию объекта на основании всех текущих пространственных позиций объекта, определенных независимо на основании принятых значений с разных инерциальных датчиков.
42. Устройство по п. 41, в котором
блок определения пространственной ориентации вычисляет результирующую текущую пространственную ориентацию объекта посредством взвешенного усреднения текущих пространственных ориентаций объекта, определенных независимо на основании значений, измеренных разными инерциальными датчиками; и
блок определения пространственной позиции вычисляет результирующую текущую пространственную позицию объекта посредством взвешенного усреднения текущих пространственных позиций объекта, определенных независимо на основании принятых значений, измеренных разными инерциальными датчиками.
| CN 104048675 A, 17.09.2014 | |||
| US 8224575 B2, 17.07.2012 | |||
| CN 107250727 A, 13.10.2017 | |||
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |

