Предлагаемое изобретение относится к области машиностроения, более конкретно, к деталям машин и механизмам для передачи вращения.
Известно электромагнитное устройство для осуществления углового колебательного движения [1]. Оно состоит из статора с обмоткой, подключенной к сети однофазного переменного тока, и ротора, вал которого соединен по концам с неподвижными спиральными пружинами. Его недостатками являются малый крутящий момент и небольшой угол колебаний, определяемые жесткостью пружин.
Известно устройство к станку для глубокого сверления, выполненное в виде трех гибких нитей, обвивающих инструмент - борштангу [2]. Нити жестко закреплены с одного конца, а с другого наматываются на барабаны со спиральными пружинами внутри. Устройство служит гибким люнетом -корсетом нежесткого инструмента и не пригодно для преобразования поступательного движения в реверсивное вращение.
Наиболее близким аналогом является реверсивный механизм с возвратно-поступательным ходом рейки, находящейся в зацеплении с зубчатым колесом [3]. Механизм имеет небольшой угол реверсирования, порядка 120°, определяемый длиной рейки; невысокое быстродействие; у него отсутствует диапазон углов реверсирования.
Технический результат предлагаемого реверсивного механизма заключается в увеличении диапазона и числа оборотов рабочего колеса в каждом направлении вращения, в повышении частоты реверсирования при упрощении конструкции и повышении ее предохранительных свойств. Указанный результат достигается тем, что устройство преобразования поступательного движения во вращение выполнено в виде гибких, закрученных одна относительно другой тяг, проходящих через отверстия рабочего колеса, и соединенных по концам с приводом поступательного движения.
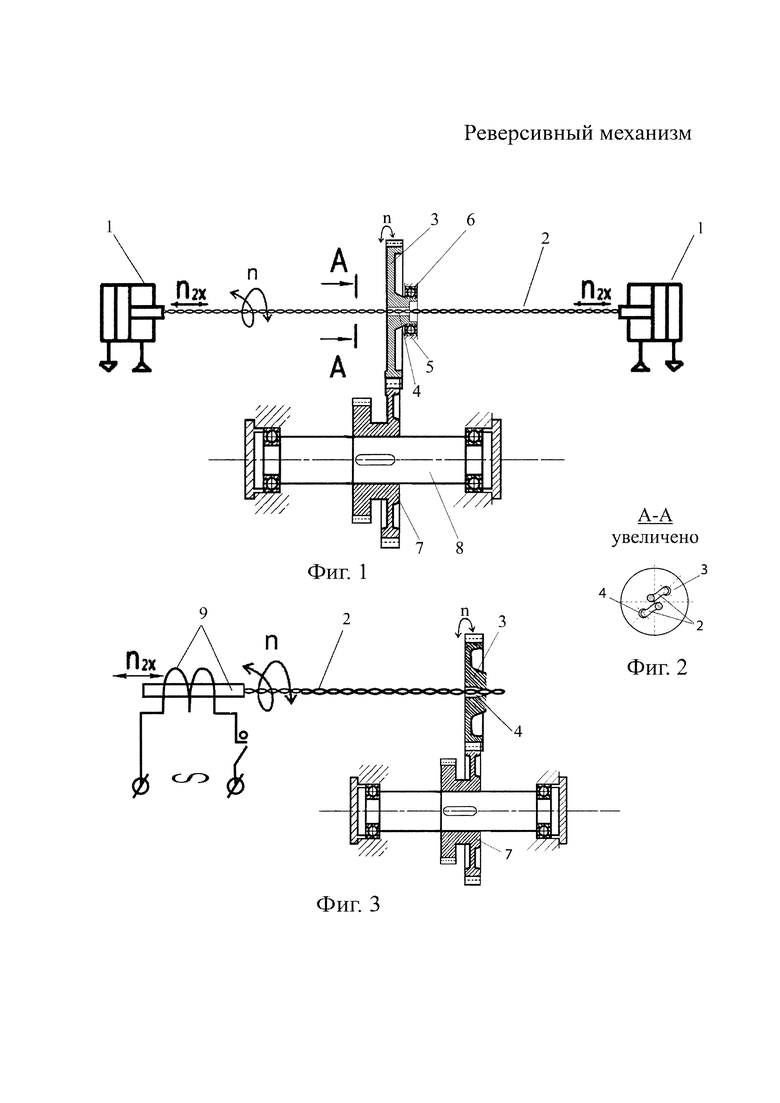
На фиг. 1 изображен реверсивный механизм, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1, увеличено; на фиг. 3 - фрагмент механизма с электромагнитным приводом возвратно - поступательного движения.
Механизм состоит из двух пневмоцилиндров 1, штоки которых соединены с гибкими тягами 2, навитыми одна на другую и проходящими через рабочее колесо 3 в отверстия 4, расположенные симметрично относительно оси его вращения (фиг. 1, 2). Колесо 3 установлено в корпусе 5 на подшипнике качения 6. Рабочее колесо 3 находится в зацеплении с ведомым колесом 7 блока зубчатых колес на валу 8 зубчатой передачи.
Привод возвратно-поступательного движения тяг может быть любого типа: пневматический, гидравлический, механический, электрический в виде электромагнита 9 (фиг. 3), комбинированный. Сами нити образованы скрученными волокнами из хлопка, льна, пеньки, шелка.
Работа механизма осуществляется следующим образом (см. фиг. 1). Тяги 2 предварительно закручивают вращением колеса 3 в одну сторону на два десятка оборотов, и штоки неработающих пневмоцилиндров 1 сближаются. При подаче сжатого воздуха в штоковые полости цилиндров штоки расходятся, закрученные тяги 2 раскручиваются и приводят во вращение колесо 3. На обратном, холостом ходе поршней штоки сближаются, и тяги закручиваются в противоположном направлении вращающимся по инерции рабочим колесом. Следующий рабочий ход поршней раскручивает тяги и приводит в противоположное вращение рабочее колесо.
В установившемся режиме пневмоцилиндры, работающие с частотой двойных ходов n2X, вызывают реверсивное кручение - раскручивание тяг и реверсирование вращения зубчатого колеса 3 через каждые несколько оборотов в одном направлении с той же частотой n. Аналогичным образом работает механизм с электромагнитным приводом (фиг. 3). После предварительного закручивания тяг 2 включают питание электромагнита 9 от сети переменного тока. Его сердечник втягивается в катушку и выталкивается пружиной сжатия (не показана) с частотой n2X, определяемой импульсным контактом (выключателем). С той же частотой реверсируется вращение колеса 3.
Конкретный пример исполнения. Модель из двух льняных нитей диаметром 1 мм, длиной 400 мм имеет рабочее колесо диаметром 30 мм, установленное посередине длины нитей, соединенных с поступательным приводом. Закрученные на 15 оборотов нити имеют шаг винтовой линии 5 мм. Растягиванием за концы нити раскручиваются и приводят во вращение колесо. При частоте возвратно-поступательного движения 60 дв.х/мин на ход 30 мм шаг закрутки изменяется от 5 до 1 мм, и колесо совершает 10 оборотов за один ход привода - 10 об/с, 600 об/мин. Каждую секунду колесо, сделав 10 оборотов в одну сторону, меняет направление вращение
Реверсивный механизм с крутильной передачей имеет широкий диапазон реверсирования по частоте и числу оборотов в одном направлении, обеспечивает высокую частоту вращения и быстродействие. Он найдет применение в приборостроении, спецтехнике, в технологических операциях по обработке материалов.
Источники информации, принятые во внимание.
1. Старая Германия патент №562040, 1932. Elektromagnetische Vorrichtung zur Erzeugung einer oszillierenden Bewegung. Leo Szilard und A.Einstein.
2. Авт.свид. СССР №1291304, МПК B23B 41/02. Станок для обработки глубоких отверстий. 1987.
3. Артоболевский И.И. Механизмы в современной технике. T.V. М.: Наука, 1976. С. 304. Механизм №439.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОЛБЛЕНИЯ И ДОЛБЯК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2385786C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2017 |
|
RU2667401C1 |
| Устройство для получения криволинейных траекторий | 1975 |
|
SU607655A2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Кулачковый механизм | 1986 |
|
SU1323797A1 |
| Автомат для навивки пружин с фигурными концами | 1983 |
|
SU1125083A1 |
| Способ нарезания зубчатых колес долбяком и устройство для его осуществления | 1980 |
|
SU1034857A1 |
| Автомат для обработки деталей кольцевого периодически повторяющегося профиля | 1982 |
|
SU1060347A1 |
| УСТРОЙСТВО ДЛЯ РАЗМЫВА ОСАДКА И ДЕЗАКТИВАЦИИ (ВАРИАНТЫ) | 2009 |
|
RU2400848C1 |
| Станок для обработки концов труб | 1988 |
|
SU1576242A1 |
Изобретение относится к области машиностроения, а более конкретно к реверсивным механизмам. Реверсивный механизм содержит привод возвратно-поступательного движения в виде пневмоцилиндров (1) и устройство преобразования поступательного движения во вращение рабочего колеса (3). Штоки пневмоцилиндров соединены с закрученными гибкими тягами (2), проходящими через отверстия рабочего колеса (3). Устройство преобразования поступательного движения образовано гибкими тягами (2), навитыми одна на другую. Тяги проходят через отверстия в колесе (3). Приводом возвратно-поступательного движения может быть электромагнит. Достигается упрощение конструкции. 2 з.п. ф-лы, 3 ил.
1. Реверсивный механизм, содержащий привод возвратно-поступательного движения, устройство преобразования поступательного движения во вращение рабочего колеса, отличающийся тем, что устройство преобразования движения образовано гибкими тягами, навитыми одна на другую и проходящими через отверстия рабочего колеса, симметричные относительно оси его вращения, при этом концы гибких тяг соединены с приводом поступательного движения.
2. Механизм по п. 1, отличающийся тем, что привод возвратно-поступательного движения выполнен в виде пневмоцилиндра, шток которого соединен с гибкими тягами.
3. Механизм по п. 1, отличающийся тем, что привод возвратно-поступательного движения выполнен в виде электромагнита, сердечник которого соединен с гибкими тягами.
| "Пуговица на нитке игра", 03.12.2014, найдено в интернет, https://moipodelki.ru/blog/view/216, [найдено 01.03.2019] | |||
| РЕВЕРСИВНЫЙ МЕХАНИЗМ | 2012 |
|
RU2492379C1 |
| WO 2014202913 A1, 24.12.2014 | |||
| ВЬЮРОК ДЛЯ ложного КРУЧЕНИЯ нити | 0 |
|
SU207323A1 |

