Изобретение относится к машиностроению и предназначено для передачи движения исполнительным органам через толкатели.
Целью изобретения является повышение КПД механизма путем уравновешивания сил и исключения трения в соединениях толкателей с кулачком.
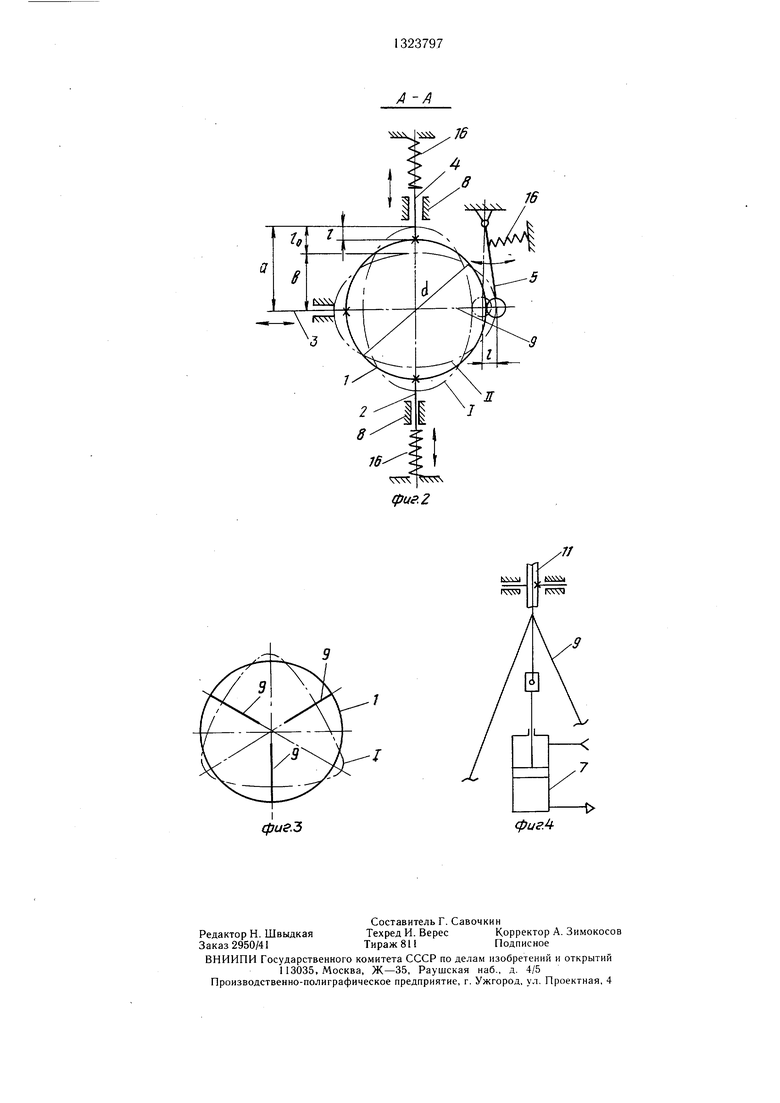
На фиг. I схематически изображен кулачковый механизм; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - механизм с тремя главными тягами; на фиг. 4 - то же, с приводом, размещенным внутри кольца.
Механизм состоит из деформируемого кулачка в виде тонкостенного упругого кольца 1, установленного между поступательно движущимися толкателями 2, 3, 4 и качающимся толкателем 5, привода 6 поступательного движения, выполненного в виде пневмоцилиндра 7. Толщина кольца 8 определяет его податливость. Кольцо 1 жестко связано с толкателями 2, 3, 4, направляющие 8 которых исключают поворот и смещение кольца 1 под нагрузкой. Число толкателей, с которыми жестко связывается кольцо 1, должно быть не меньще двух во избежание перекоса кольца 1 при деформации. Более равномерно распределяются нагрузки при жестком соединении его с тремя и четырьмя толкателями. Целесообразно симметричное расположение толкателей. Упругость кольца снимает избыточные кинематические связи при четырех и большем числе жестких соединений с толкателями. С одного торца кольца 1 равномерно по периферии закреплены две гибкие тяги 9. Тяг может быть три (фиг. 3) и больше. Число их определяет форму деформации от эллиптической (при двух тягах) до полигональной (при нескольких). Тяги выполняются из проволоки или тросов и крепятся в отверстиях кольца 1. Тяги через шарнир 10 соединены со штоком пневмоци- ,1индра 7. Для уменьшения габаритов меха- яизма тяги могут быть соединены со штоком через вращающийся блок II (фиг. 4). В этом случае привод 6 поступательного движения размещается внутри кольца. Пнев- моцилиндр 7 посредством золотника 12 соединяется с сетью 13 давления воздуха или с атмосферой через глушитель 14. При необходимости передачи движения в разделенные среды, например, из атмосферы в вакуум или из атмосферы в агрессивную среду щток пневмоцилиндра 7 герметизируется сильфо- ном 15, жестко соединенным с разделительной стенкой. Толкатели 2-4 подпружинены к кольцу 1 пружинами 16. Для увеличения хода толкателей их рекомендуется устанавливать в зонах наибольших деформаций кольца - в плоскостях крепления тяг и перпендикулярно им.
Кулачковый механизм работает следующим образом.
При подаче сжатого воздуха через золотник 12 в штоковую полость пневмо- цилиндра 7 щток входит в него на величину S и через гибкие тяги 9 нагружает кольцо 1, которое не имеет осевого перемещения (положение I штрих-пунктир на фиг. 1). Тяги 9 деформируют упру- гое кольцо 1 в поперечном направлении. Радиальная сила F деформирования кольца 1 равна
F FD-ctgoC,
где FO - осевая сила на штоке;
5 - угол наклона гибкой тяги 9 к оси
кольца 1.
Следовательно, чем меньше угол наклона тяг к оси кольца, тем больше радиальная сила и давление на толкатели. Кольцо при двух тягах деформируется в эл0 липе, при трех - в криволинейный треугольник. В зоне наибольшей деформации кольца величина хода толкателя L от исходного положения равна полуразности большой оси эллипса 2а и диаметра d кольца
.
При переключении золотником 12 сжатого воздуха в поршневую полость пневмоцилиндра 7 шток 6 выходит из него и кольцо 1 под действием собственных упругих
0 сил и пружин 16 возврата толкателей прижимает круглую форму. При дальнейшем выдвижении штока кольцо деформируется в обратном направлении под действием пружин сжатия 16 толкателей и занимает положение II. Полный ход толкателей fo, рав5 ный расстоянию соответствующих точек коль ца в положениях I и II, определяется полуразностью больщой и малой осей эллипса 1о а - b (фиг. 2).
40
Формула изобретения
1.Кулачковый механизм, содержащий гиб кий кулачок, взаимодействующие с ним толкатели и привод поступательного движения, отличающийся тем, что, с целью повышения
дс КПД, кулачок выполнен в виде упругого кольца, по периметру которого установлены толкатели, по крайней мере два из которых жестко связаны с ним, а механизм снабжен гибкими тягами, одни концы которых закреплены на кольце равномерно по его
50, периметру, а другие связаны с приводом поступательного движения, который установлен соосно кольцу.
2.Механизм по п. 1, отличающийся тем, что, с целью уменьщения габаритов, он снабжен блоком, взаимодействующим с гибкими
55 тягами, а привод поступательного движения размещен внутри кольца.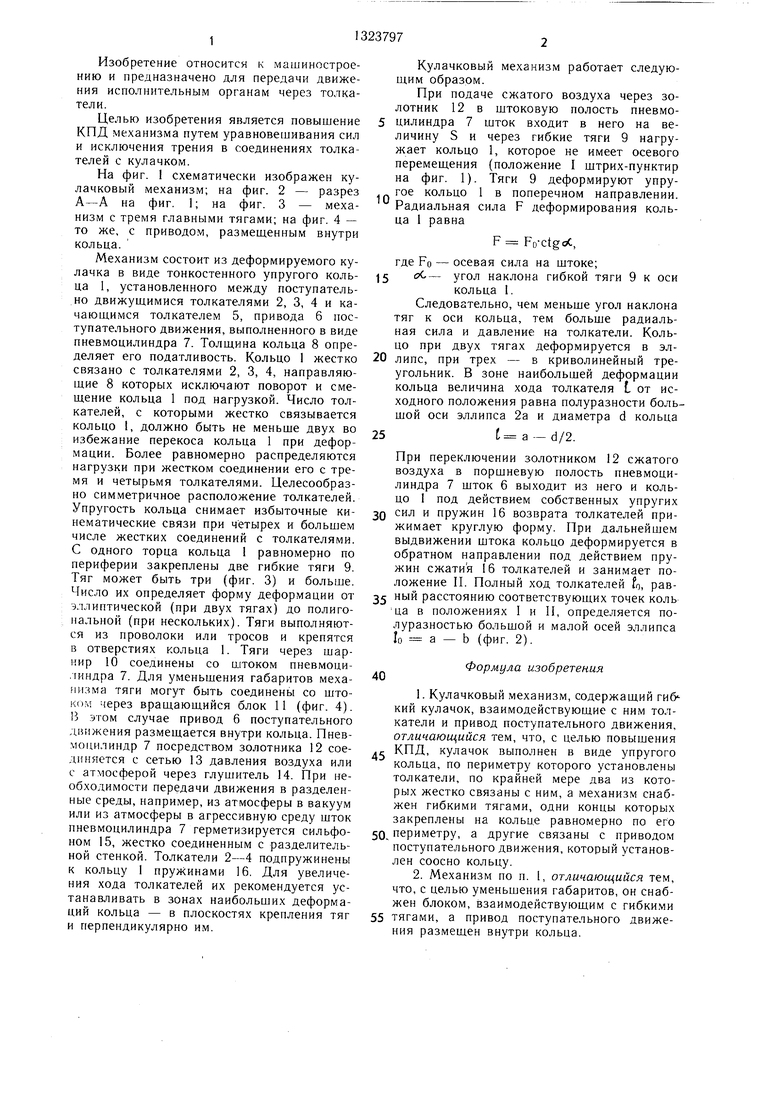
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Инерционная гидроимпульсная вибромашина | 1981 |
|
SU967651A1 |
| Силовой регулятор с дистанционным приводом для автоматической трансмиссии | 1976 |
|
SU621599A2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ТАРЫ В ПОЗИЦИЮ УКЛАДКИ ИЗДЕЛИЙ И ВЫДАЧИ ЕЕ ПОСЛЕ НАПОЛНЕНИЯ | 2003 |
|
RU2248314C2 |
| СПОСОБ СОЗДАНИЯ СИЛЫ ТЯГИ В ПОДВИЖНЫХ СРЕДАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2285633C2 |
| МЕХАНИЧЕСКИЙ ВАКУУМНЫЙ ВВОД | 2006 |
|
RU2306470C1 |
| Станок для обработки концов труб | 1988 |
|
SU1576242A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ УПРАВЛЯЕМОЙ СТЫКОВКИ РАЗЪЕМНЫХ СОЕДИНИТЕЛЕЙ КОММУНИКАЦИЙ | 2009 |
|
RU2417492C2 |
| Исполнительный механизмМЕХАНичЕСКОгО ТОРМОзА | 1978 |
|
SU799678A3 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ СО СДВОЕННОЙ ХРАПОВОЙ ПЕРЕДАЧЕЙ | 2013 |
|
RU2510614C1 |
Изобретение относится к машиностроению, предназначено для передачи движения исполнительным органам через толкатели. Цель изобретения - повышение КПД путем уравновешивания сил и исключения трения в соединениях толкателей с кулачком. Кулачок выполнен в виде упругого кольца 1, по периметру которого установлены толкатели, по крайней мере два из которых жестко связаны с ним. Гибкие тяги 9 одними концами закреплены на кольце 1 равномерно по его периметру, а другие связаны с приводом 6 поступательного движения, который установлен соосно кольцу 1. Для уменьшения габаритов привод 6 может быть расположен внутри кольца I, при этом тяги 9 взаимодействуют с блоком И. Привод 6 посредством гибких тяг 9 деформирует кольцо 1 в поперечном направлении. Толкатели, связанные с кольцом, передают движение к исполнительным органам. Возврат ме.ханизма в исходное положение происходит за счет упругости кольца 1 и пружин. 1 з.п. ф-лы. 4 ил. /4 ел 00 to со ;о ipuBf
фие.З
фигЛ
| Механизм поступательного движения | 1979 |
|
SU868197A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
