Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству обнаружения уступов и к способу обнаружения уступов для обнаружения уступа на поверхности дороги.
Уровень техники
[0002] Известно устройство обнаружения придорожных объектов, которое обнаруживает информацию высоты на поверхности дороги из изображений, снятых камерой, и обнаруживает уступ на поверхности дороги, сформированный посредством придорожных объектов, таких как бордюр, из информации высоты (см. патентный документ 1).
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2014-002608
Сущность изобретения
Техническая задача
[0004] Вышеприведенное устройство обнаружения придорожных объектов распознает, что имеется уступ, когда величина изменения высоты поверхности дороги превышает или равна пороговому значению. В случае если проезжая часть имеет градиент, высота поверхности дороги отличается в зависимости от позиции проезжей части, так что величина изменения высоты поверхности дороги не может точно обнаруживаться в некоторых случаях в зависимости от того, как задавать позиции на проезжей части.
[0005] Настоящее изобретение осуществлено с учетом вышеизложенной проблемы, и его задача заключается в том, чтобы предоставлять устройство обнаружения уступов и способ обнаружения уступов, которые допускают точное обнаружение позиции уступа на поверхности дороги, даже если проезжая часть имеет градиент.
Решение задачи
[0006] Устройство обнаружения уступов согласно аспекту настоящего изобретения включает в себя модуль измерения расстояния, который определяет высоту поверхности дороги вокруг транспортного средства, аппроксимирует, с помощью кривой, градиент поверхности дороги в области возможности движения в направлении ширины транспортного средства на основе высоты поверхности дороги и обнаруживает уступ на поверхности дороги на основе степени согласования высоты точки измерения относительно упомянутой кривой и степени согласования высоты точки измерения относительно кривой, с помощью которой аппроксимируется градиент поверхности дороги в расширенной области, заданной посредством расширения области возможности движения в направлении ширины транспортного средства.
Преимущества изобретения
[0007] Аспект настоящего изобретения допускает обнаружение крутого изменения высоты поверхности дороги или уступа, из степени согласования точки измерения относительно кривой. Таким образом, можно точно обнаруживать позицию уступа на поверхности дороги, даже если проезжая часть имеет градиент.
Краткое описание чертежей
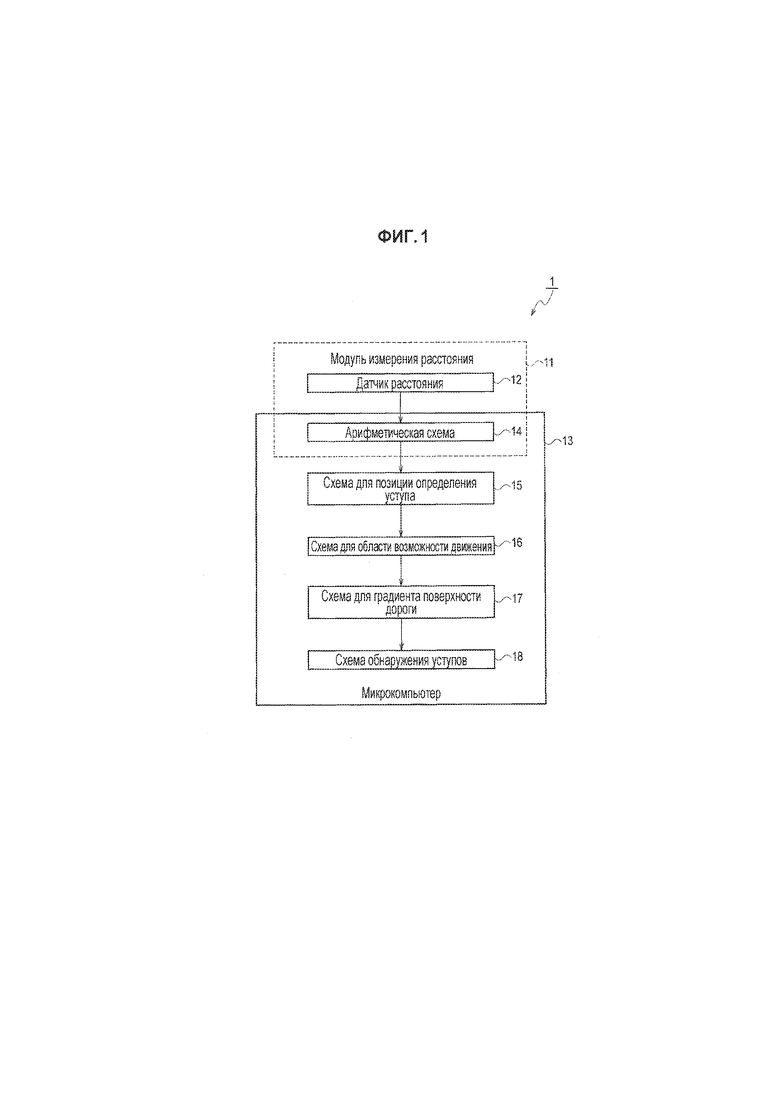
[0008] Фиг. 1 является блок-схемой, иллюстрирующей общую конфигурацию устройства 1 обнаружения уступов согласно варианту осуществления.
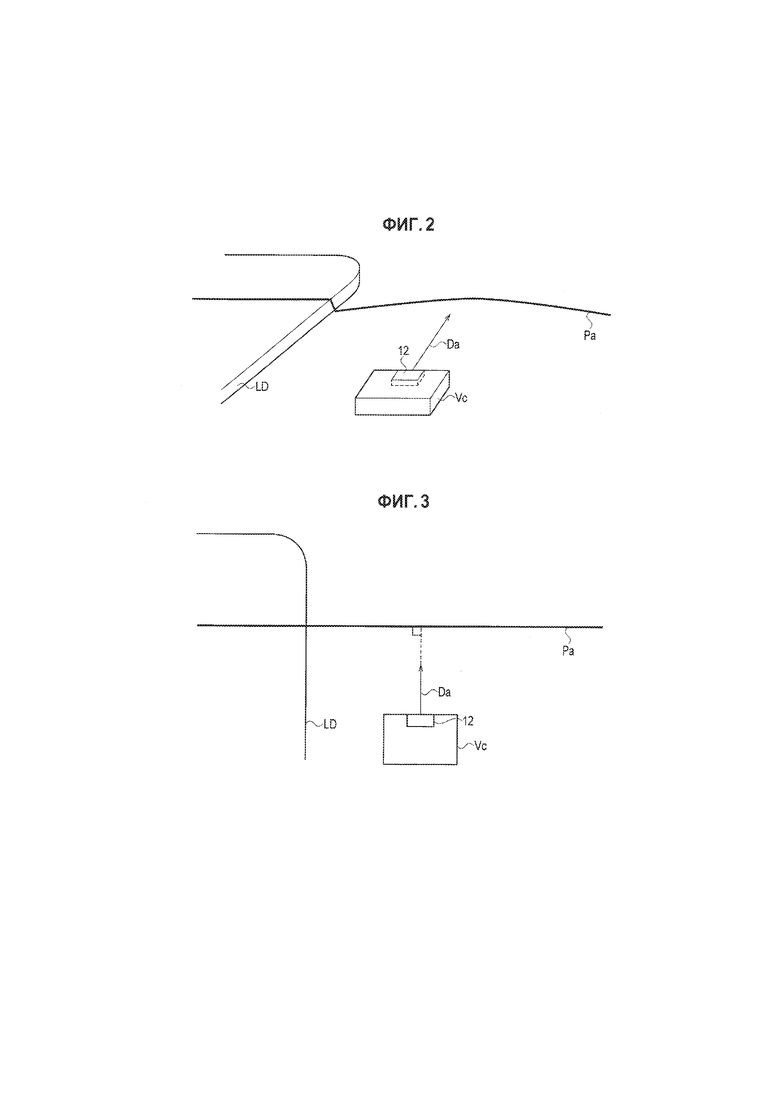
Фиг. 2 является общим видом, иллюстрирующим пример линейной позиции (Pa) определения уступа, заданной на поверхности дороги вокруг транспортного средства.
Фиг. 3 является видом сверху, соответствующим фиг. 2.
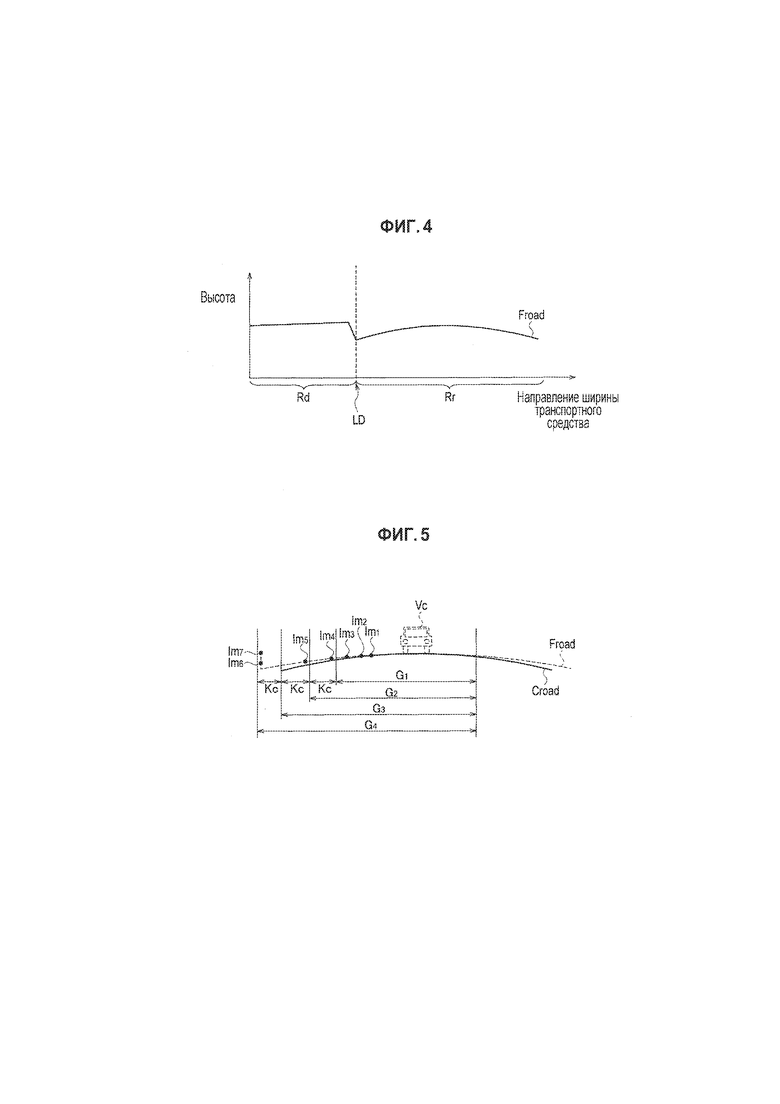
Фиг. 4 является графиком, иллюстрирующим распределение высоты поверхности (Froad) дороги в позиции (Pa) определения уступа.
Фиг. 5 является схемой, иллюстрирующей последовательность циклов обработки пошагового расширения области (G1-G4) поверхности (Froad) дороги, которая должна аппроксимироваться с помощью кривой, на предварительно определенный диапазон (Kc) на каждом уступе, и определения изменения степени согласования точек (Im1-Im7) измерения относительно кривой (Croad).
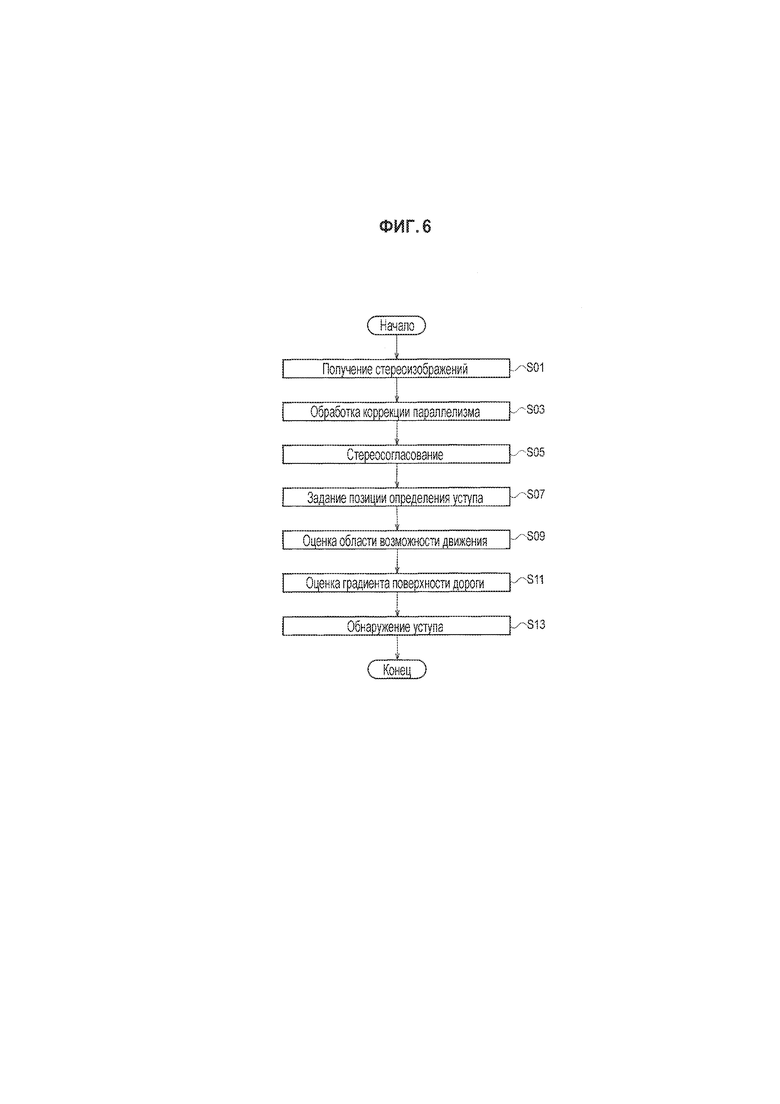
Фиг. 6 является блок-схемой последовательности операций, иллюстрирующей пример способа обнаружения уступов с использованием устройства 1 обнаружения уступов на фиг. 1.
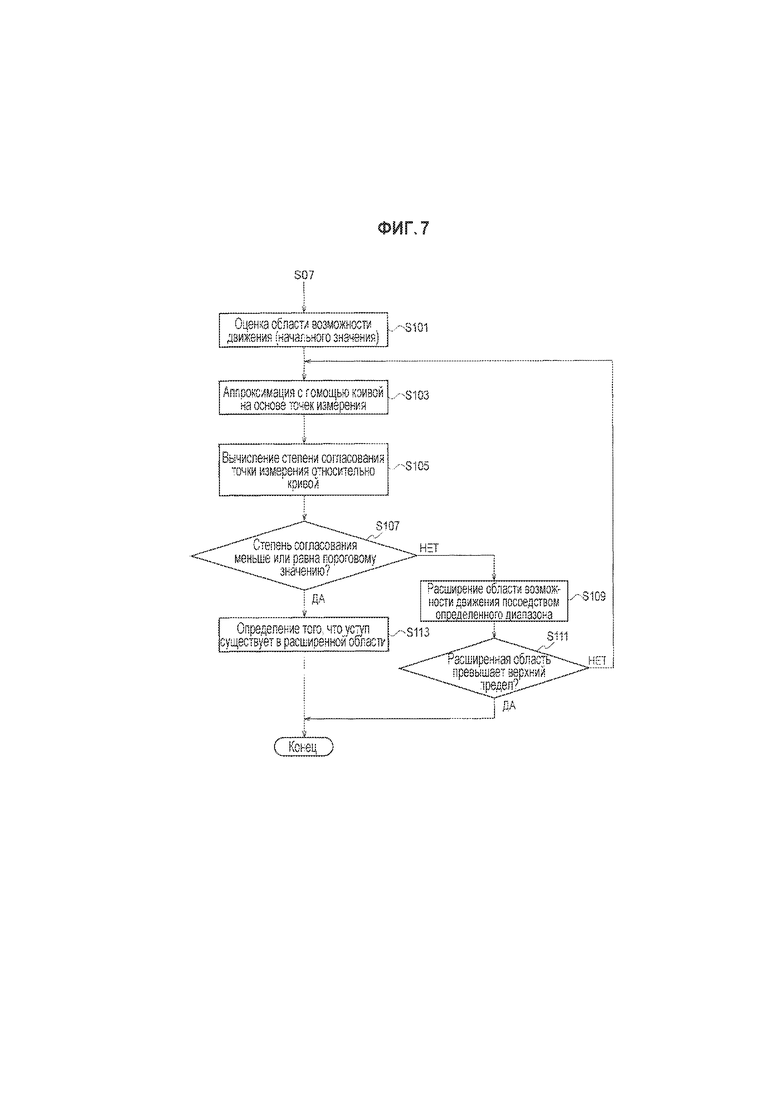
Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей пример подробных процедур этапов S09-S13 на фиг. 6.
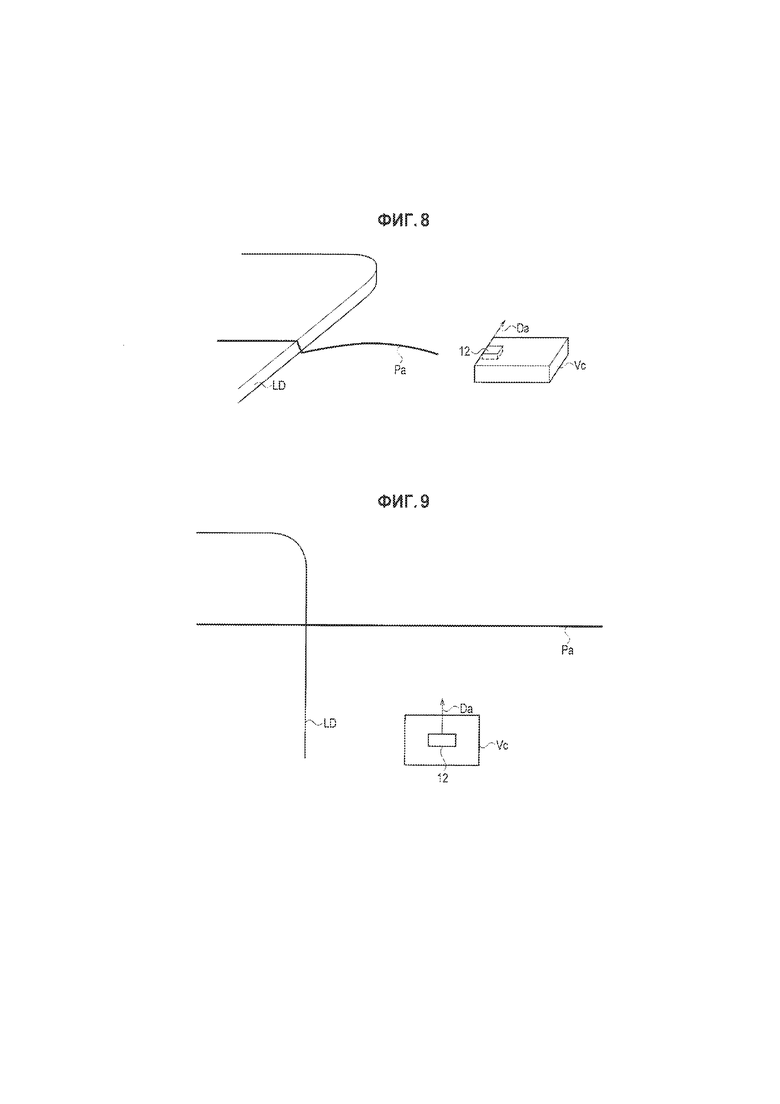
Фиг. 8 является общим видом, иллюстрирующим пример позиции (Pa) определения уступа в случае, если стереокамера устанавливается на поперечной стороне транспортного средства (Vc).
Фиг. 9 является видом сверху, иллюстрирующим пример LRF на 360 градусов, в котором LRF (12) устанавливается в центре крыши транспортного средства (Vc), и диапазон излучения задается в качестве всей окружности транспортного средства.
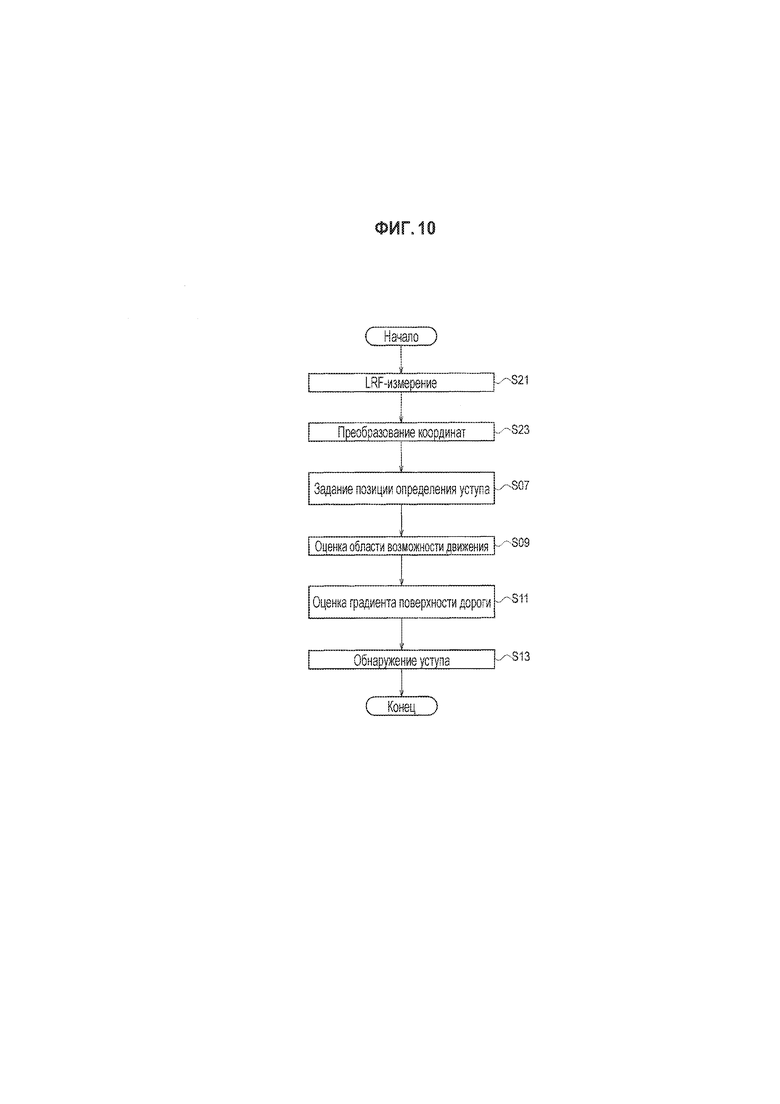
Фиг. 10 является блок-схемой последовательности операций, иллюстрирующей пример способа обнаружения уступов в случае использования лазерного дальномера (LRF) в качестве датчика 12 расстояния.
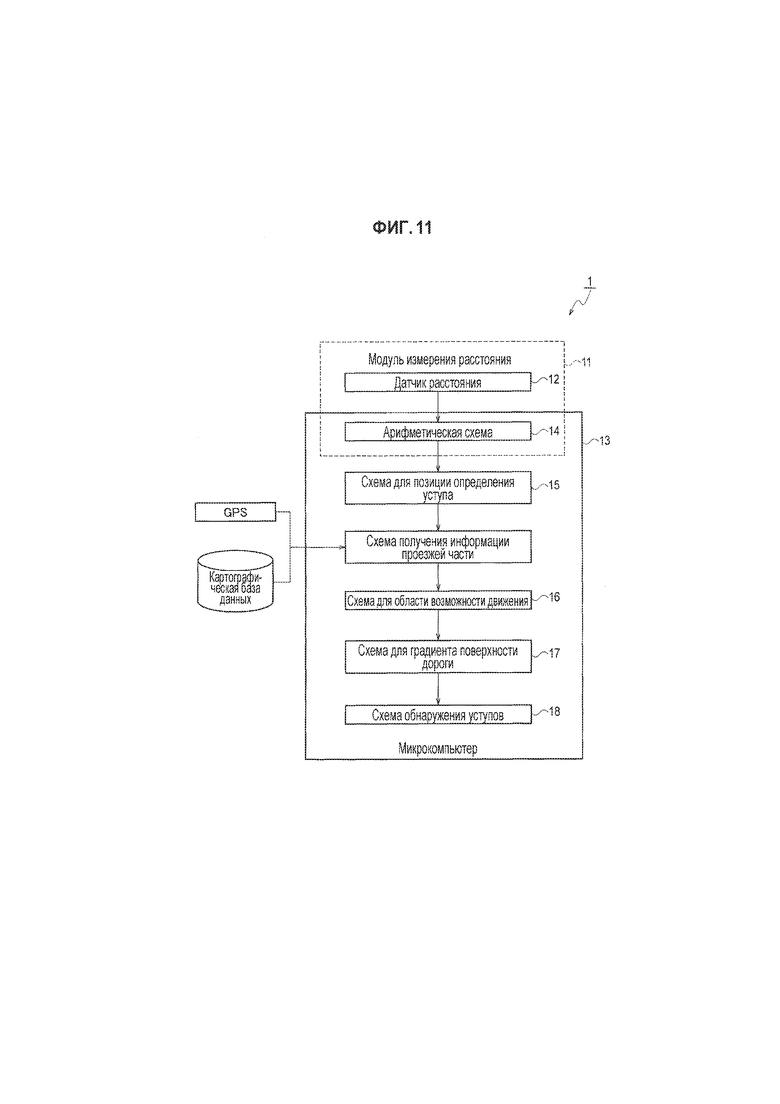
Фиг. 11 является блок-схемой, иллюстрирующей общую конфигурацию устройства 2 обнаружения уступов согласно третьей и четвертой модификациям.
Подробное описание вариантов осуществления
[0009] Первый вариант осуществления
Далее подробно описываются варианты осуществления со ссылкой на чертежи.
[0010] Ниже описывается общая конфигурация устройства 1 обнаружения уступов согласно варианту осуществления со ссылкой на фиг. 1. Устройство 1 обнаружения уступов определяет высоту поверхности дороги (в дальнейшем называемой "поверхностью дороги") вокруг транспортного средства и аппроксимирует градиент поверхности дороги с помощью кривой. Затем устройство 1 обнаружения уступов обнаруживает уступ на поверхности дороги на основе степени согласования точек измерения поверхности дороги относительно аппроксимирующей кривой.
[0011] В частности, устройство 1 обнаружения уступов включает в себя датчик 12 расстояния для определения высоты поверхности дороги вокруг транспортного средства и микрокомпьютер 13 для выполнения последовательности обработки информации, чтобы обнаруживать уступ на поверхности дороги из данных высоты точек измерения, измеряемых посредством датчика 12 расстояния.
[0012] Пример датчика 12 расстояния представляет собой стереокамеру, которая выполняет съемку объектов вокруг транспортного средства из нескольких различных направлений одновременно и в силу этого также может сохранять информацию в направлении глубины (расстояния от датчика 12) объектов вокруг транспортного средства. Посредством выполнения определенной обработки изображений для стереоизображений, полученных посредством стереокамеры, можно получать трехмерную информацию относительно изображения объекта, появляющегося на стереоизображениях объекта вокруг транспортного средства. Объекты вокруг транспортного средства включают в себя дорогу и бордюр. Ниже поясняются подробности.
[0013] Микрокомпьютер 13 включает в себя, например, универсальный микроконтроллер, оснащенный CPU, запоминающим устройством и модулем ввода-вывода, и служит в качестве нескольких схем обработки информации, включенных в устройство обнаружения уступов посредством выполнения предварительно установленной компьютерной программы. Микрокомпьютер 13 многократно выполняет, с предварительно определенными временными интервалами, последовательность циклов обработки информации, чтобы обнаруживать уступ на поверхности дороги из данных измерений, полученных посредством датчика 12 расстояния. Микрокомпьютер 13 также может использоваться в качестве электронного модуля управления (ECU), используемого для другого управления транспортным средством.
[0014] Несколько схем обработки информации, в качестве которых выступает микрокомпьютер 13, включают в себя арифметическую схему 14, схему 15 для позиции определения уступа, схему 16 для области возможности движения, схему 17 для градиента поверхности дороги и схему 18 обнаружения уступов.
[0015] Арифметическая схема 14 составляет модуль 11 измерения расстояния вместе с датчиком 12 расстояния и выполняет, из стереоизображений, полученных посредством стереокамеры, последовательность обработки стереоизображения, чтобы получать трехмерную информацию относительно изображений объекта, появляющихся на стереоизображениях объектов вокруг транспортного средства.
[0016] Например, арифметическая схема 14 выполняет обработку коррекции искажения линзы для коррекции искажения стереоизображений, вызываемого посредством линз, и выполняет обработку коррекции параллелизма для коррекции вертикальной позиции между стереоизображениями (обработку для того, чтобы задавать стереоизображения параллельными и с идентичной высотой). Затем арифметическая схема 14 выполняет обработку стереосогласования для оценки соответствия между пикселами стереоизображений. Это позволяет вычислять не только двумерные координаты объекта на плоскости формирования изображений стереокамеры, но также и расстояния от плоскости формирования изображений стереокамеры до объекта. Таким образом, можно определять расстояние и направлени е относительно объекта вокруг транспортного средства.
[0017] Арифметическая схема 14 дополнительно выполняет обработку преобразования координат и в силу этого может получать трехмерную информацию относительно объектов вокруг транспортного средства в координатах данных измерений расстояния. Трехмерная информация относительно объектов вокруг транспортного средства включает в себя трехмерную информацию относительно поверхности дороги вокруг транспортного средства. Таким образом, арифметическая схема 14 может получать данные высоты точек измерения поверхности дороги вокруг транспортного средства.
[0018] Обработка коррекции искажения линзы, например, захватывает плоскую пластину с черно-белым шахматным рисунком с помощью каждой камеры и оценивает параметр искажения линзы и параметр центра линзы камеры, которые обеспечивают возможность точкам решетки шахматного рисунка иметь решетчатую форму, состоящую из прямоугольников. Здесь, эта обработка может представлять собой общепринятый способ для коррекции искажения линзы, и настоящий вариант осуществления не имеет конкретных ограничений.
[0019] Обработка коррекции параллелизма, например, захватывает плоскую пластину с черно-белым шахматным рисунком с помощью обеих камер стереокамеры и оценивает параметр пространственной позиции и угловой параметр между стереокамерами, которые обеспечивают возможность нахождения позиций точек решетки шахматного рисунка на изображениях обеих камер в идентичных вертикальных позициях. Здесь, эта обработка может представлять собой общепринятый способ для коррекции параллелизма, и настоящий вариант осуществления не имеет конкретных ограничений.
[0020] Обработка стереосогласования, например, вычисляет то, с каким пикселом в изображении, снятом правой камерой, ассоциирован каждый пиксел в изображении, снятом левой камерой, относительно изображения, снятого левой камерой. Например, обработка стереосогласования вычисляет абсолютные значения для значения яркости каждого пиксела в изображении, снятом левой камерой, и значения яркости каждого пиксела в изображении, снятом правой камерой, в качестве значений оценки и вычисляет пиксел в изображении, снятом правой камерой, значение оценки которого является минимальным, в качестве ассоциированного пиксела. Способы вычисления значения для оценки включают в себя, например, способ с использованием суммы абсолютных разностей (SAD) или суммы квадратов разности (SSD) или способ, в котором область вычисления с оценкой включает в себя не только одну точку каждого пиксела, но и периферийные пикселы каждого пиксела. Здесь, способ для вычисления значений оценки также может представлять собой другой общепринятый способ, и настоящий вариант осуществления не имеет конкретных ограничений.
[0021] Схема 15 для позиции определения уступа задает линейную позицию определения уступа в направлении ширины транспортного средства на поверхности дороги вокруг транспортного средства в координатах данных измерений расстояния, обнаруженных посредством датчика 12 расстояния. Например, как проиллюстрировано на фиг. 2 и 3, схема 15 для позиции определения уступа задает позицию (Pa) определения уступа, которая отдалена от датчика 12 расстояния в первом предварительно определенном направлении (Da) на предварительно определенное расстояние и проходит в направлении, ортогональном к первому предварительно определенному направлению (Da) на поверхности дороги в координатах данных измерений расстояния. Фиг. 2 и 3 иллюстрируют пример, в котором датчик 12 расстояния устанавливается в передней части транспортного средства (Vc), и первое предварительно определенное направление (Da) задается в качестве направления движения транспортного средства (Vc). Следовательно, позиция (Pa) определения уступа, идущая в направлении ширины транспортного средства, задается впереди транспортного средства (Vc) в координатах данных измерений расстояния. Следует отметить, что позиция (Pa) определения уступа задается в области захвата изображений стереокамеры. Первое предварительно определенное направление (Da) не ограничено направлением движения транспортного средства (Vc).
[0022] В примере, проиллюстрированном на фиг. 2 и 3, уступ (LD), имеющий скачкообразное изменение в высоте поверхности дороги, формируется на обочине дороги, которая представляет собой конец проезжей части в направлении ширины транспортного средства, по которой может двигаться транспортное средство (Vc). За пределами проезжей части с уступом (LD), в качестве границы предоставляется ступенчатый участок (например, тротуар или обочина дороги), поверхность дороги которого находится на один уступ выше проезжей части. Как описано выше, в примере, проиллюстрированном на фиг. 2 и 3, дорога включает в себя проезжую часть и ступенчатый участок (тротуар или обочину дороги), и на границе между проезжей частью и ступенчатым участком (тротуаром или обочиной дороги) формируется уступ (LD). Линейная позиция (Pa) определения уступа идет в направлении, в котором она пересекает проезжую часть, уступ (LD) и ступенчатый участок (тротуар или обочину дороги).
[0023] Позиционная взаимосвязь между вышеприведенным датчиком 12 расстояния и позицией (Pa) определения уступа представляет собой простой пример. Ниже описывается другой пример со ссылкой на фиг. 8 и 9.
[0024] Схема 15 для позиции определения уступа вычисляет распределение данных высоты (данные измерений расстояния) точек измерения на поверхности дороги в позиции (Pa) определения уступа из высоты поверхности дороги, полученной посредством арифметической схемы 14. На фиг. 4, вертикальная ось представляет высоту поверхности (Froad) дороги, и горизонтальная ось представляет позицию (Pa) определения уступа, идущую в направлении ширины транспортного средства.
[0025] Как проиллюстрировано на фиг. 4, на границе между проезжей частью (Rr) и ступенчатым участком (Rd) формируется уступ (LD). Поверхность (Froad) дороги проезжей части (Rr) имеет такой градиент (наклон), что высота уменьшается от центра к обочинам дороги с обоих концов. Это представляет собой типичную конструкцию и структуру дорог для того, чтобы улучшать дренаж проезжей части и исключать нахождение воды на проезжей части. Высота поверхности (Froad) дороги внезапно увеличивается на уступе (LD), и поверхность (Froad) дороги ступенчатого участка (Rd) имеет плоскую поверхность, которая на один уступ выше проезжей части (Rr). Например, тротуар и т.п. формируется на ступенчатом участке (Rd).
[0026] Схема 16 для области возможности движения оценивает область (G1) возможности движения в направлении движения транспортного средства (Vc) в позиции (Pa) определения уступа на основе скорости транспортного средства (Vc). Область (G1) возможности движения указывает область, в которой может двигаться транспортное средство (Vc) и которая исключает границу проезжей части, например, уступ. Как проиллюстрировано на фиг. 5, схема 16 для области возможности движения оценивает область, включающую в себя ширину транспортного средства (Vc) и предварительно определенную граничную область движения, добавленную в нее, в качестве области (G1) возможности движения в направлении движения транспортного средства (Vc).
[0027] Предварительно определенная граничная область движения варьируется в зависимости от скорости транспортного средства. Чем выше скорость транспортного средства (Vc) в направлении движения, тем шире может задаваться предварительно определенная граничная область движения. Другими словами, чем выше скорость транспортного средства (Vc) в направлении движения, тем шире схема 16 для области возможности движения может оценивать область (G1) возможности движения в направлении ширины транспортного средства. Следует отметить, что скорость транспортного средства (Vc) может получаться посредством информации скорости транспортного средства или информации импульсов скорости вращения колес через CAN или посредством непрерывного получения информации позиции транспортного средства с использованием GPS.
[0028] В качестве примера, если транспортное средство движется при 70 км/час, схема 16 для области возможности движения определяет то, что транспортное средство движется на магистральной дороге, и задает область возможности движения с шириной 8 м. Если транспортное средство движется при 20 км/час, схема 16 для области возможности движения определяет то, что транспортное средство движется на узкой улице, к примеру, в жилом районе, и задает область возможности движения с шириной 4 м.
[0029] Схема 17 для градиента поверхности дороги аппроксимирует градиент поверхности (Froad) дороги области (G1) возможности движения в направлении ширины транспортного средства с помощью кривой, на основе высоты поверхности дороги. Что касается аппроксимирующей кривой, например, используется квадратичная кривая. Кроме того, могут использоваться линейная кривая, сплайновая кривая или комбинация вышеозначенного. В частности, как проиллюстрировано на фиг. 5, схема 17 для градиента поверхности дороги выбирает несколько точек (Im1, Im2, Im3) измерения в позиции (Pa) определения уступа в области (G1) возможности движения. С использованием данных высоты точек (Im1, Im2, Im3) измерения, схема 17 для градиента поверхности дороги аппроксимирует градиент поверхности (Froad) дороги проезжей части (Rr) в направлении ширины транспортного средства с помощью кривой (Croad). Любое число и любые позиции могут выбираться для точек измерения.
[0030] Здесь, если область (G1) возможности движения является слишком узкой по сравнению с областью фактической проезжей части (Rr), расстояние от конца области (G1) возможности движения до конца проезжей части (Rr) (обочины дороги) является большим. Это отделяет аппроксимирующую кривую (Croad) от градиента фактической проезжей части (Rr), что затрудняет точное обнаружение уступа (LD). В свете вышеуказанного, посредством расширения области (G1) возможности движения постепенно в направлении ширины транспортного средства и повторения аппроксимации на кривой, можно задавать кривую (Croad) близкой к градиенту фактической проезжей части (Rr) и точно обнаруживать изменение степени согласования точек измерения относительно кривой (Croad). Степень согласования точек измерения относительно кривой (Croad) представляет собой, например, отклонение или среднеквадратическое отклонение точек измерения относительно кривой (Croad). Чем меньше отклонение или среднеквадратическое отклонение, тем выше степень согласования.
[0031] Альтернативно, как указано посредством формулы (1), степень согласования может получаться с использованием квадратической ошибки R. Здесь, yi является точкой измерения, fi является оценкой на кривой (Croad), и yav является средним точек измерения. Можно сказать, что чем ближе к 1 составляет это значение, тем выше степень согласования. Хотя результат зависит от окружения, если величина уменьшения этого значения (R2) превышает 0,1, можно определять то, что уступ включен.
[0032] математическая формула 1

[0033] В частности, схема 17 для градиента поверхности дороги аппроксимирует на кривой градиент поверхности (Froad) дороги в направлении ширины транспортного средства расширенной области (G2, G3, G4,...), которая задается посредством расширения области (G1) возможности движения в позиции (Pa) определения уступа. Схема 18 обнаружения уступов вычисляет первую степень согласования высот наборов точек (Im1, Im2, Im3) измерения в области (G1) возможности движения относительно кривой (Croad). Затем, схема 18 обнаружения уступов вычисляет вторую степень согласования данных высоты набора точек (Im1, Im2,..., Im6, Im7) измерения в расширенной области (G2, G3, G4,...) относительно аппроксимирующей кривой, которая представляет собой аппроксимацию градиента поверхности (Froad) дороги в направлении ширины транспортного средства расширенной области (G2, G3, G4,...). Затем схема 18 обнаружения уступов обнаруживает уступ на поверхности дороги на основе первой степени согласования и второй степени согласования.
[0034] Например, схема 16 для области возможности движения задает расширенную область (G2), которая задается посредством расширения области (G1) возможности движения в направлении ширины транспортного средства на предварительно определенный диапазон (Kc). Схема 17 для градиента поверхности дороги аппроксимирует на кривой градиент поверхности (Froad) дороги в расширенной области (G2) в направлении ширины транспортного средства. Схема 18 обнаружения уступов вычисляет степень согласования данных высоты точек (Im1, Im2, Im3, Im4) измерения относительно кривой. Аналогично, схема 16 для области возможности движения задает расширенную область (G3), которая задается посредством расширения расширенной области (G2) в направлении ширины транспортного средства на предварительно определенный диапазон (Kc). Схема 17 для градиента поверхности дороги аппроксимирует на кривой градиент поверхности (Froad) дороги в расширенной области (G3) в направлении ширины транспортного средства, и схема 18 обнаружения уступов вычисляет степень согласования данных высоты точек (Im1, Im2, Im3, Im4, Im5) измерения относительно кривой. Устройство 1 обнаружения уступов повторяет эту последовательность циклов обработки. Затем схема 18 обнаружения уступов определяет то, что имеется уступ в участке, в котором ошибка аппроксимации (пример степени согласования) между кривой и точками измерения значительно изменяется.
[0035] Расширенная область (G4) включает в себя уступ (LD). Степень согласования данных высоты точек (Im1~Im7) измерения в расширенной области (G4) относительно аппроксимирующей кривой значительно изменяется по сравнению с предыдущим циклом обработки. Это обусловлено тем, что предварительно определенный диапазон (Kc), который представляет собой разность между расширенной областью (G3) и расширенной областью (G4), включает в себя точки (Im6, Im7) измерения, заданные на уступе (LD). Как описано выше, схема 18 обнаружения уступов обнаруживает уступ на основе степени согласования, многократно вычисленной в этой последовательности циклов обработки. Расширенная область для аппроксимации на кривой поверхности дороги расширяется пошагово в направлении ширины транспортного средства на предварительно определенный диапазон (Kc) на каждом уступе, и расширенная область (G1-G3) до того, как степень согласования уменьшается, может рассматриваться в качестве проезжей части. Таким образом, может точно получаться позиция уступа. Поскольку проезжая часть широко используется для того, чтобы выполнять аппроксимацию на кривой, можно точно выполнять определение уступа.
[0036] Со ссылкой на фиг. 6, приводится описание для примера способа обнаружения уступов с использованием устройства 1 обнаружения уступов на фиг. 1. Во-первых, на этапе S01, стереоизображения получаются с использованием стереокамеры, которая представляет собой пример датчика 12 расстояния.
[0037] Процесс переходит к этапу S03, на котором арифметическая схема 14 выполняет обработку коррекции искажения линзы для коррекции искажения стереоизображений, вызываемого посредством линз, и обработку коррекции параллелизма для коррекции вертикальной позиции между стереоизображениями. Процесс переходит к этапу S05, на котором арифметическая схема 14 выполняет обработку стереосогласования для оценки соответствия между пикселами стереоизображений. Это позволяет определять расстояние и направление относительно объекта вокруг транспортного средства. Арифметическая схема 14 дополнительно выполняет обработку преобразования координат и в силу этого может получать трехмерную информацию относительно поверхности дороги вокруг транспортного средства в координатах данных измерений расстояния.
[0038] Процесс переходит к этапу S07, на котором схема 15 для позиции определения уступа задает линейную позицию (Pa) определения уступа, идущую в направлении ширины транспортного средства на поверхности дороги вокруг транспортного средства, в координатах данных измерений расстояния, обнаруженных посредством датчика 12 расстояния, например, как проиллюстрировано на фиг. 2 и 3. Затем схема 15 для позиции определения уступа вычисляет данные высоты (данные измерений расстояния) точек измерения на поверхности дороги в позиции (Pa) определения уступа, из трехмерной информации относительно поверхности дороги, полученной посредством арифметической схемы 14, как проиллюстрировано на фиг. 4.
[0039] Процесс переходит к этапу 09, на котором схема 16 для области возможности движения оценивает область, включающую в себя ширину транспортного средства (Vc) и предварительно определенную граничную область движения, добавленную в нее, в качестве области (G1) возможности движения транспортного средства (Vc) в позиции (Pa) определения уступа, как проиллюстрировано на фиг. 5.
[0040] Процесс переходит к этапу 11, на котором схема 17 для градиента поверхности дороги задает несколько точек (Im1, Im2, Im3) измерения в позиции (Pa) определения уступа в области (G1) возможности движения, как проиллюстрировано на фиг. 5. С использованием данных высоты точек (Im1, Im2, Im3) измерения, схема 17 для градиента поверхности дороги аппроксимирует градиент поверхности (Froad) дороги в направлении высоты с помощью кривой (Croad). Затем схема 17 для градиента поверхности дороги аппроксимирует на кривой градиент поверхности (Froad) дороги в направлении ширины транспортного средства расширенной области (G2, G3, G4,...), которая задается посредством расширения области (G1) возможности движения в позиции (Pa) определения уступа.
[0041] Процесс переходит к этапу 13, на котором схема 18 обнаружения уступов вычисляет первую степень согласования данных высоты наборов точек (Im1, Im2, Im3) измерения в области (G1) возможности движения относительно кривой (Croad). Затем, схема 18 обнаружения уступов вычисляет вторую степень согласования данных высоты набора точек (Im1, Im2,..., Im6, Im7) измерения в расширенной области (G2, G3, G4,...) относительно кривой, которая представляет собой аппроксимацию градиента поверхности (Froad) дороги расширенной области (G2, G3, G4,...) в направлении ширины транспортного средства. Затем схема 18 обнаружения уступов обнаруживает уступ на поверхности дороги на основе первой степени согласования и второй степени согласования.
[0042] Со ссылкой на фиг. 7, приводится описание для примера подробных процедур этапов S09-S13 на фиг. 6. Во-первых, на этапе S101, схема 16 для области возможности движения оценивает область (G1) возможности движения, которая является начальным значением диапазона, в котором должна аппроксимироваться кривая поверхности (Froad) дороги в направлении ширины транспортного средства. Затем, градиент поверхности дороги области (G1) возможности движения в направлении ширины транспортного средства аппроксимируется с помощью кривой (Croad) (S103), и степень согласования высот точек (Im1, Im2, Im3) измерения относительно кривой (Croad) вычисляется (S105). Схема 18 обнаружения уступов определяет то, меньше или равна либо нет степень согласования предварительно определенному опорному значению. Если степень согласования не меньше или равна предварительно определенному опорному значению ("Нет" на S107), можно определять то, что область (G1) возможности движения не включает в себя уступ. Соответственно, процесс переходит к этапу S109, на котором задается расширенная область (G2), заданная посредством расширения области (G1) возможности движения в направлении ширины транспортного средства на предварительно определенный диапазон (Kc). Следует отметить, что предварительно определенное опорное значение на S107 может задаваться равным, например, 10 см.
[0043] Устройство 1 обнаружения уступов сравнивает расширенную область (G2) с верхним пределом, заданным в соответствии с шириной расширенной области. Если расширенная область (G2) превышает верхний предел ("Да" на S111), обнаружение уступа, задающего границу дороги, отменяется, и процесс завершается. Если расширенная область (G2) не превышает верхний предел ("Нет" на S111), процесс возвращается к этапу S103, и этапы S103-S111 повторяются до тех пор, пока степень согласования не станет меньше или равной предварительно определенному опорному значению.
[0044] Когда степень согласования становится меньше или равной предварительно определенному опорному значению ("Да" на 107), схема 18 обнаружения уступов определяет то, что уступ существует в предварительно определенном диапазоне (Kc), добавленном на этапе S109, выполняемом последним (S113).
[0045] Как описано выше, вариант осуществления предоставляет следующую работу и преимущества.
[0046] В случае если проезжая часть имеет градиент, высота поверхности дороги отличается в зависимости от позиции проезжей части, так что величина изменения высоты поверхности дороги не может точно обнаруживаться в некоторых случаях в зависимости от того, как задавать позиции на проезжей части. Как результат, если величина изменения высоты поверхности дороги оценивается как меньшая, уступ не обнаруживается. Если величина изменения высоты поверхности дороги оценивается как большая, уступ ошибочно обнаруживается. В свете вышеуказанного, градиент поверхности дороги в направлении ширины транспортного средства аппроксимируется с помощью кривой, и уступ на поверхности дороги обнаруживается из разности между высотой поверхности дороги и кривой. В частности, если степень согласования в расширенной области, заданной посредством расширения области возможности движения в позиции определения уступа в направлении ширины транспортного средства, значительно изменяется относительно степени согласования точек измерения относительно кривой в области возможности движения, можно определять то, что резкое изменение высоты поверхности дороги или уступа существует в участке, который увеличен посредством расширения. Следовательно, даже если проезжая часть имеет градиент (наклон), можно точно обнаруживать уступ на поверхности дороги.
[0047] Чем выше скорость транспортного средства (Vc), тем шире схема 16 для области возможности движения оценивает область (G1) возможности движения. Когда скорость транспортного средства является высокой, предполагается, что транспортное средство движется по широкой проезжей части, к примеру, по шоссе или магистральной дороге. С другой стороны, когда скорость транспортного средства является низкой, предполагается, что транспортное средство движется по узкой проезжей части, к примеру, в жилом районе. Таким образом, можно надлежащим образом задавать область, которая не включает в себя уступ (LD) и по которой может двигаться транспортное средство, и в силу этого повышать точность обнаружения уступа (LD).
[0048] Устройство 1 обнаружения уступов повторяет цикл из расширения области (G1) возможности движения в направлении ширины транспортного средства на предварительно определенный диапазон (Kc); аппроксимации, с помощью кривой, градиента поверхности (Froad) дороги в расширенной области (G2, G3, G4,...) в направлении ширины транспортного средства, которая расширена на предварительно определенный диапазон (Kc); и вычисления степени согласования высот точек (Im1, Im2,...) измерения относительно кривой. Схема 18 обнаружения уступов обнаруживает уступ на основе многократно вычисленной степени согласования. Расширенная область (G2, G3, G4,...) для аппроксимации на кривой поверхности (Froad) дороги расширяется пошагово в направлении ширины транспортного средства на предварительно определенный диапазон (Kc) на каждом уступе, и расширенная область (G2, G3, G4,...) до того, как степень согласования уменьшается, может рассматриваться в качестве проезжей части. Таким образом, может точно получаться позиция уступа (LD). Поскольку проезжая часть широко используется для того, чтобы выполнять аппроксимацию на кривой, можно точно выполнять определение уступа (LD). Уменьшение предварительно определенного диапазона (Kc) повышает точность позиционирования определения уступа (LD).
[0049] Хотя выше описан вариант осуществления согласно настоящему изобретению, как описано выше, не следует понимать, что описания и чертежи, составляющие часть этого раскрытия сущности, ограничивают настоящее изобретение. Это раскрытие сущности предоставит различные альтернативы, примеры и технологии работы для специалистов в данной области техники.
[0050] Первая модификация
Стереокамера в качестве датчика 12 расстояния может устанавливаться на поперечной стороне транспортного средства (Vc), как проиллюстрировано на фиг. 8, а не в передней части транспортного средства (Vc), и область захвата изображений стереокамеры может находиться на поперечной стороне транспортного средства (Vc). Также в этом случае, первое предварительно определенное направление (Da) задается в качестве направления движения транспортного средства (Vc). Это обеспечивает возможность схеме 15 для позиции определения уступа задавать линейную позицию (Pa) определения уступа, пересекающую уступ (LD) на поверхности дороги вокруг (на поперечной стороне) транспортного средства. В частности, можно задавать позицию (Pa) определения уступа, которая находится на большом расстоянии от датчика 12 расстояния в первом предварительно определенном направлении (Da) на предварительно определенное расстояние и идет в направлении, ортогональном к первому предварительно определенному направлению (Da).
[0051] Вторая модификация
Другой пример датчика 12 расстояния представляет собой лазерный дальномер (LRF). LRF испускает лазер в объекты вокруг транспортного средства и измеряет возвращаемый лазер, отражаемый посредством объектов. Таким образом, LRF измеряет направление, в котором располагается объект, на основе направления, в котором испускается лазер, и измеряет расстояние до объекта на основе времени от лазерного излучения до приема отраженного лазера. LRF также называется лазерным сканером. Диапазон излучения LRF может произвольно задаваться. Фиг. 9 иллюстрирует пример LRF на 360 градусов, в котором LRF (12) устанавливается в центре крыши транспортного средства (Vc), и диапазон излучения задается в качестве всей окружности. Схема 15 для позиции определения уступа задает позицию (Pa) определения уступа, которая находится на большом расстоянии от датчика 12 расстояния в первом предварительно определенном направлении (Da) на предварительно определенное расстояние и идет в направлении, ортогональном к первому предварительно определенному направлению (Da). Поскольку, аналогично примеру на фиг. 2, в котором датчик 12 расстояния устанавливается в передней части транспортного средства (Vc), первое предварительно определенное направление (Da) задается в качестве направления движения транспортного средства (Vc), позиция (Pa) определения уступа, идущая в направлении ширины транспортного средства, задается впереди транспортного средства (Vc).
[0052] Следует отметить, что посредством установки LRF с углом снижения, можно наблюдать широкий диапазон направления движения транспортного средства в ходе движения. Альтернативно, может использоваться многослойный LRF, допускающий испускание нескольких из лазеров одновременно.
[0053] Способ обнаружения уступов с использованием лазерного дальномера (LRF) в качестве датчика 12 расстояния отличается тем, что этапы S21 и S23, описанные ниже, выполняются вместо этапов S01-S05 на фиг. 6. Другие этапы S07-S13 являются идентичными этапам на фиг. 6, и их описания опускаются.
[0054] На этапе S21, LRF (12) измеряет направления для объектов, в которые испускается лазер, а также расстояния объектов. Данные измерений передаются в арифметическую схему 14. Процесс переходит к этапу 23, на котором арифметическая схема 14 преобразует данные измерений в системе полярных координат с LRF (12) в качестве начала координат в данные в ортогональной системе координат с транспортным средством (Vc) в качестве начала координат. Это обеспечивает возможность арифметической схеме 14 получать трехмерную информацию относительно поверхности дороги вокруг транспортного средства. После этого, процесс переходит к этапу S07.
[0055] Третья модификация
В варианте осуществления, схема 16 для области возможности движения определяет ширину области (G1) возможности движения на основе скорости транспортного средства (Vc). Ширина области (G1) возможности движения может определяться не только на основе скорости транспортного средства (Vc), но также и с использованием другого опорного значения. Например, схема 16 для области возможности движения может определять ширину области (G1) возможности движения на основе информации относительно проезжей части (Rr), по которой движется транспортное средство (Vc) (информации проезжей части). Например, чтобы не включать фактическую границу дороги, можно задавать область возможности движения в качестве диапазона на 1 м меньше ширины, включенной в информацию проезжей части.
[0056] Как проиллюстрировано на фиг. 11, микрокомпьютер 13 дополнительно включает в себя схему 19 получения информации проезжей части. Схема 19 получения информации проезжей части получает информацию относительно проезжей части (Rr), по которой движется транспортное средство (Vc), из GPS 20 и картографической базы 21 данных. Схема 16 для области возможности движения может задавать расстояние области (G1) возможности движения в направлении ширины транспортного средства на основе информации относительно проезжей части (Rr). Посредством использования информации относительно проезжей части (Rr), можно надлежащим образом задавать область, которая не включает в себя уступ (LD) и по которой может двигаться транспортное средство (Vc), и в силу этого повышать точность обнаружения уступа (LD).
[0057] Четвертая модификация
Информация относительно проезжей части (Rr), полученная посредством схемы 19 получения информации проезжей части, может использоваться не только в качестве опорного значения ширины области (G1) возможности движения, но также и в качестве опорных значений для задания других параметров. Например, устройство 2 обнаружения уступов задает верхний предел, используемый на S111 на фиг. 7, на основе информации относительно проезжей части (Rr). Например, в случае LRF, диапазон излучения составляет приблизительно 10 м, и в силу этого верхний предел может задаваться равным 10 м. Если ширина расширенной области превышает верхний предел, обработка обнаружения уступов может завершаться. Таким образом, можно завершать обработку обнаружения уступов в предварительно определенное время даже для дороги без отдельного уступа.
Список позиционных обозначений
[0058] 1, 2 - устройство обнаружения уступов
11 - модуль измерения расстояния
12 - датчик расстояния
13 - микрокомпьютер
14 - арифметическая схема
15 - схема для позиции определения уступа
16 - схема для области возможности движения
17 - схема для градиента поверхности дороги
18 - схема обнаружения уступов
19 - схема получения информации проезжей части
20 - GPS (глобальная система позиционирования)
21 - картографическая база данных
G1 - область возможности движения
G2-G4 - расширенная область
Im1-Im7 - точка измерения
Croad - кривая
Froad - поверхность дороги
Kc - предварительно определенный диапазон
Pa - позиция определения уступа
LD – уступ.
Изобретение относится к устройству обнаружения уступов и способу обнаружения уступов на поверхности дороги. Устройство обнаружения уступов включает в себя модуль измерения расстояния и схемы для области возможности движения, для градиента поверхности дороги и для определения уступов. Модуль определяет высоту поверхности дороги вокруг транспортного средства (ТС). Схема для области возможности движения оценивает область возможности движения в направлении движения ТС. Схема для градиента поверхности дороги аппроксимирует с помощью кривой градиент поверхности дороги в области возможности движения перед ТС на основе высоты поверхности дороги. Схема определения уступов обнаруживает уступ на поверхности дороги на основе степени согласования высоты точки измерения относительно упомянутой кривой и степени согласования высоты точки измерения относительно кривой, с помощью которой аппроксимируется градиент поверхности дороги в расширенной области в направлении ширины ТС. Повышается точность определения неровностей дороги. 2 н. и 4 з.п. ф-лы, 11 ил.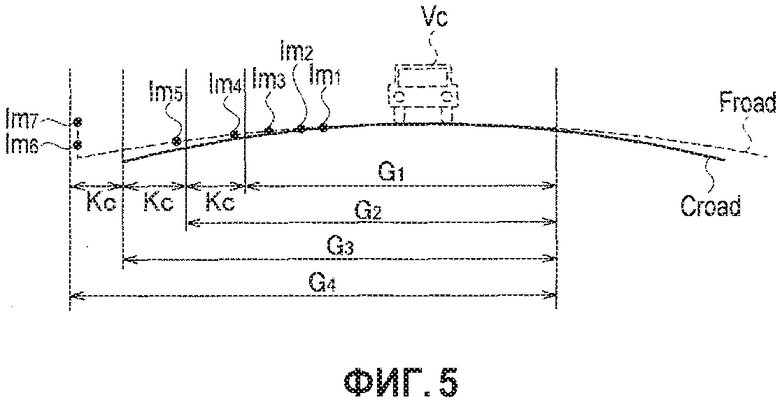
1. Устройство обнаружения уступов, содержащее:
- модуль измерения расстояния, который определяет высоту поверхности дороги вокруг транспортного средства;
- схему для области возможности движения, которая оценивает область возможности движения в направлении движения транспортного средства;
- схему для градиента поверхности дороги, которая аппроксимирует, с помощью кривой, градиент поверхности дороги в области возможности движения в направлении ширины транспортного средства, на основе высоты поверхности дороги, определенной посредством модуля измерения расстояния; и
- схему обнаружения уступов, которая обнаруживает уступ на поверхности дороги, на основе степени согласования высоты набора точек измерения в области возможности движения относительно упомянутой кривой и степени согласования высоты набора точек измерения в расширенной области, заданной посредством расширения области возможности движения в направлении ширины транспортного средства, относительно кривой, с помощью которой аппроксимируется градиент поверхности дороги в расширенной области.
2. Устройство обнаружения уступов по п. 1, в котором:
чем выше скорость транспортного средства, тем шире схема для области возможности движения оценивает область возможности движения в направлении ширины транспортного средства.
3. Устройство обнаружения уступов по п. 1, дополнительно содержащее:
- схему получения информации проезжей части, которая получает информацию относительно проезжей части, по которой движется транспортное средство, при этом:
схема для области возможности движения задает расстояние области возможности движения в направлении ширины транспортного средства на основе информации относительно проезжей части.
4. Устройство обнаружения уступов по любому из пп. 1-3, в котором:
устройство обнаружения уступов повторяет цикл из расширения области возможности движения в направлении ширины транспортного средства на предварительно определенный диапазон; аппроксимации, с помощью кривой, градиента поверхности дороги в расширенной области, которая расширяется на предварительно определенный диапазон; и вычисления степени согласования высоты точки измерения относительно кривой, и
схема обнаружения уступов обнаруживает уступ на основе многократно вычисленной степени согласования.
5. Устройство обнаружения уступов по п. 4, дополнительно содержащее:
- схему получения информации проезжей части, которая получает информацию относительно проезжей части, по которой движется транспортное средство, при этом:
устройство обнаружения уступов задает верхний предел равным ширине расширенной области на основе информации относительно проезжей части.
6. Способ обнаружения уступов, содержащий этапы, на которых:
- определяют высоту поверхности дороги вокруг транспортного средства;
- оценивают область возможности движения в направлении движения транспортного средства;
- аппроксимируют, с помощью кривой, градиент поверхности дороги в области возможности движения в направлении ширины транспортного средства, на основе высоты поверхности дороги; и
- обнаруживают уступ на поверхности дороги, на основе степени согласования высоты набора точек измерения в области возможности движения относительно упомянутой кривой и степени согласования высоты набора точек измерения в расширенной области, заданной посредством расширения области возможности движения в направлении ширины транспортного средства, относительно кривой, с помощью которой аппроксимируется градиент поверхности дороги в расширенной области.
| JP 2013205130 A, 07.10.2013 | |||
| US 8411900 B2, 02.04.2013 | |||
| Способ получения тетраметилтиурамдисульфида | 1936 |
|
SU53766A1 |

