[Область техники, к которой относится изобретение]
[0001]
Настоящее изобретение относится к способу управления движением и устройству управления движением для транспортного средства для управления движением задействуемого транспортного средства.
[Уровень техники]
[0002]
В случае, если автоматическое управление вождением выполняется для автономного вождения с помощью устройства управления движением, чтобы следовать целевой траектории и выполнять автономное вождение, необходимо избегать препятствий посредством вмешательства водителем в действие рулевого управления, когда препятствия, такие как припаркованное на улице транспортное средство существует на целевой траектории. В этом случае управление движением задействуемого транспортного средства становится режимом ручной коррекции, в котором ручное управление процессом имеет приоритет над автоматическим управлением процессом. Обычное устройство управления движением корректирует значение команды управления рулевым управлением посредством автоматического управления процессом в соответствии с намерением водителя во время ручной коррекции движения задействуемого транспортного средства.
[Документ предшествующего уровня техники]
[Патентный документ]
[0003]
[Патентный документ 1] JP 2017-052486 A
[Сущность изобретения]
[Проблема, которую решает изобретение]
[0004]
Тем не менее, в системе рулевого управления согласно Патентному документу 1 смена полос движения транспортного средства посредством ручной коррекции не рассматривается. Следовательно, когда задействуемое транспортное средство осуществляет смену полос движения из-за вмешательства водителя в ручное управление процессом, переключение между ручным управлением процессом и автоматическим управлением процессом не выполняется плавно, и поэтому существует вероятность того, что перемещение транспортного средства будет нестабильным.
[0005]
Задача, которая должна быть решена настоящим изобретением, состоит в том, чтобы предоставить способ управления движением и устройство управления движением для транспортного средства, приспособленных стабилизировать перемещение задействуемого транспортного средства, когда автономное транспортное средство, выполняющее автономное движение, осуществляет смену полос движения посредством ручной коррекции.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает описанные выше проблемы посредством генерирования траектории с учетом ручной коррекции задействуемого транспортного средства и управления перемещением задействуемого транспортного средства для осуществления смены полос движения посредством движения по сгенерированной траектории, когда автономное транспортное средство, движущееся автономно, осуществляет смену полос движения посредством ручной коррекции.
[Результат изобретения]
[0007]
В соответствии с настоящим изобретением, поскольку автономное транспортное средство следует траектории, генерированной с учетом ручной коррекции, когда автономное транспортное средство, выполняющее автономное вождение, осуществляет смену полос движения посредством ручной коррекции, можно стабилизировать движение задействуемого автомобиля.
[Краткое описание чертежей]
[0008]
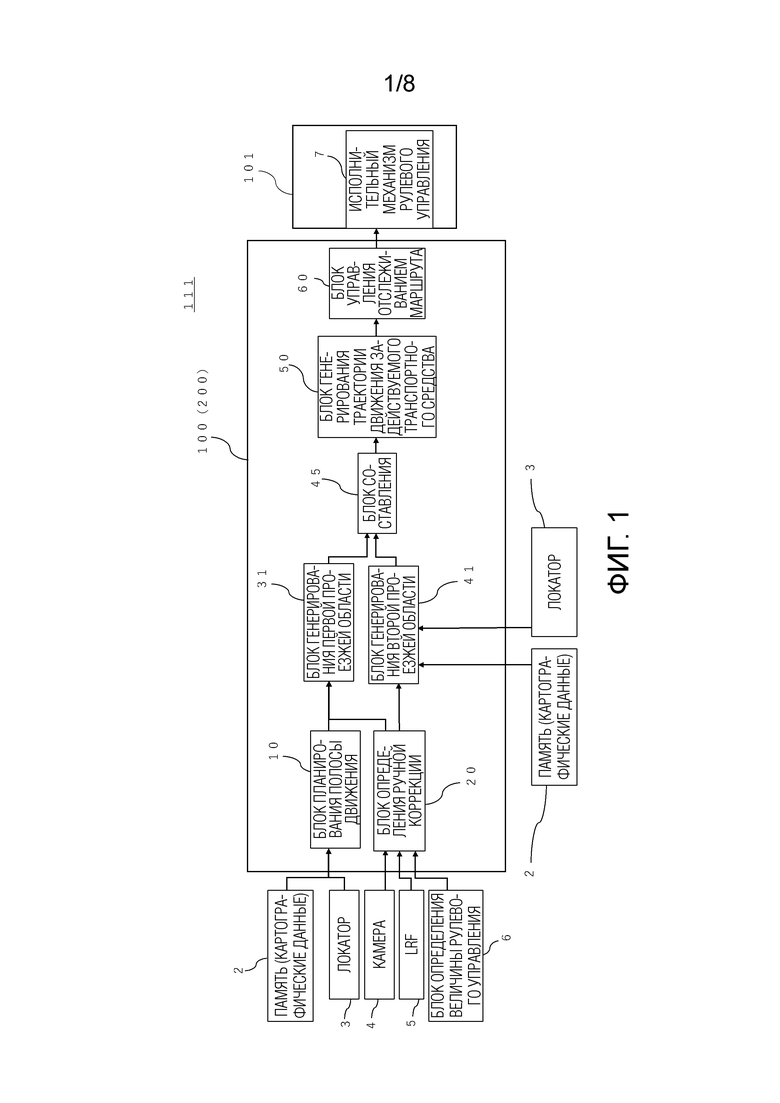
На Фиг.1 изображена блок-схема, показывающая конфигурацию системы управления движением, включающей в себя устройство управления движением согласно первому варианту осуществления.
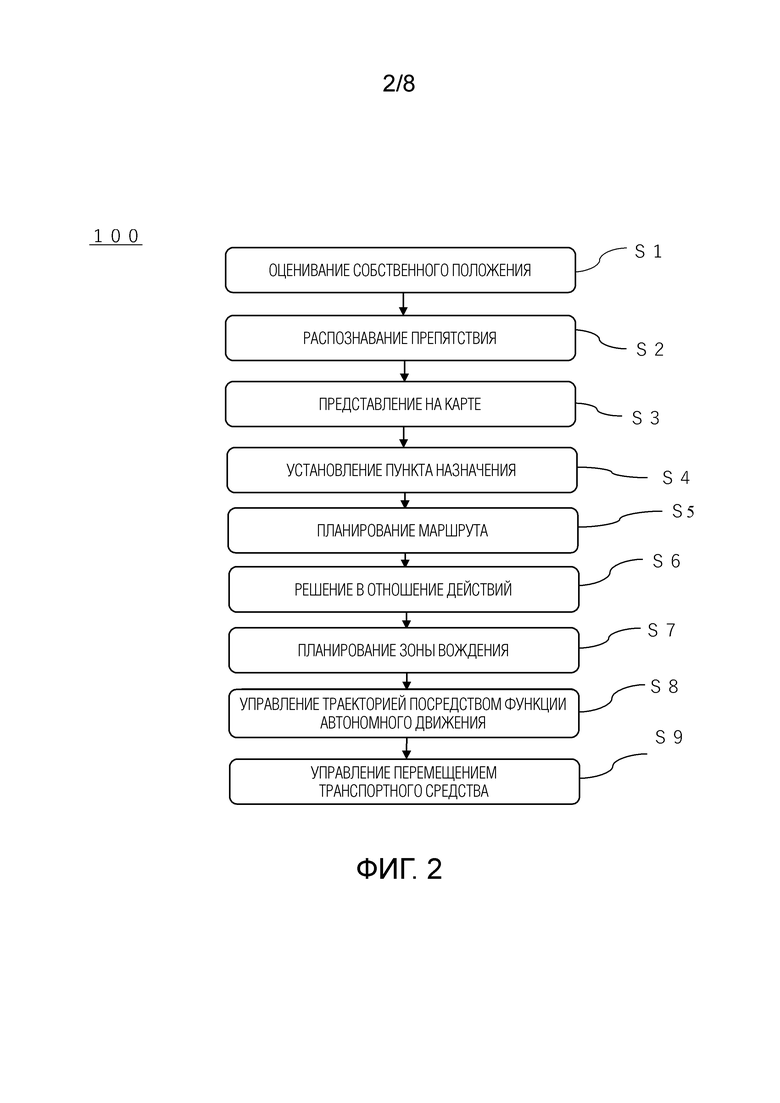
На Фиг.2 изображена блок-схема последовательности операций, показывающая план управления устройством управления движением, показанным на Фиг.1.
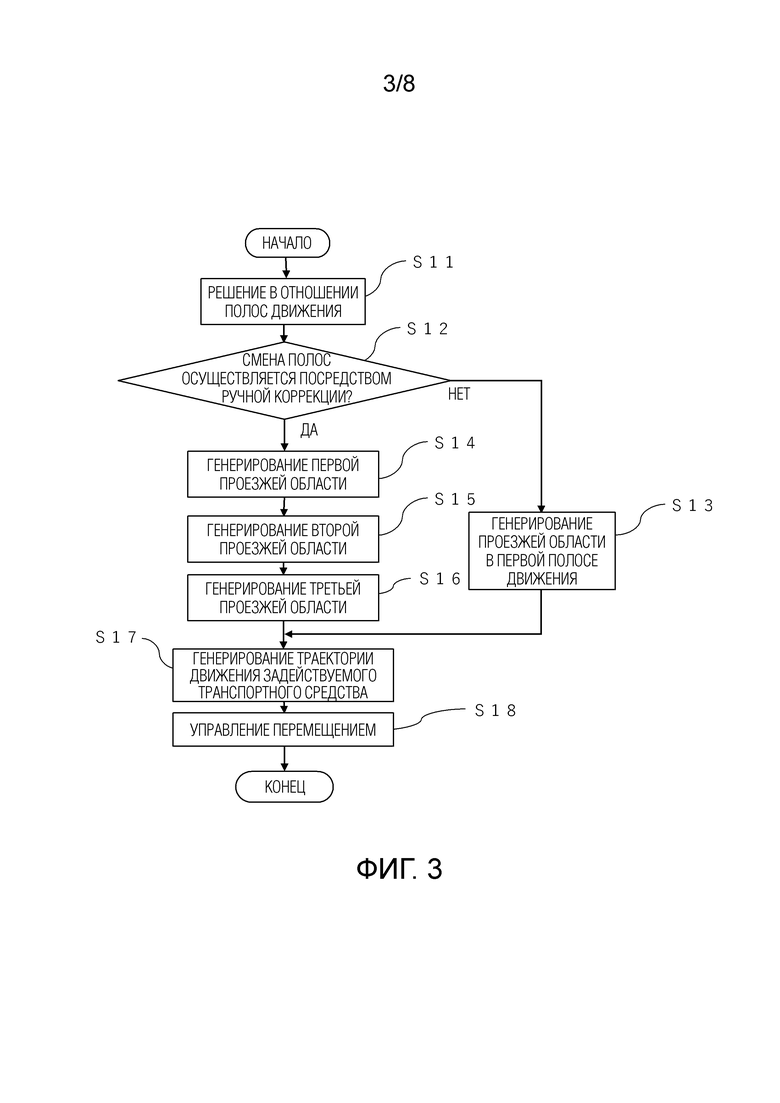
На Фиг.3 изображена блок-схема последовательности операций, показывающая способ генерирования траектории движения задействуемого транспортного средства устройством управления движением, показанным на Фиг.1.
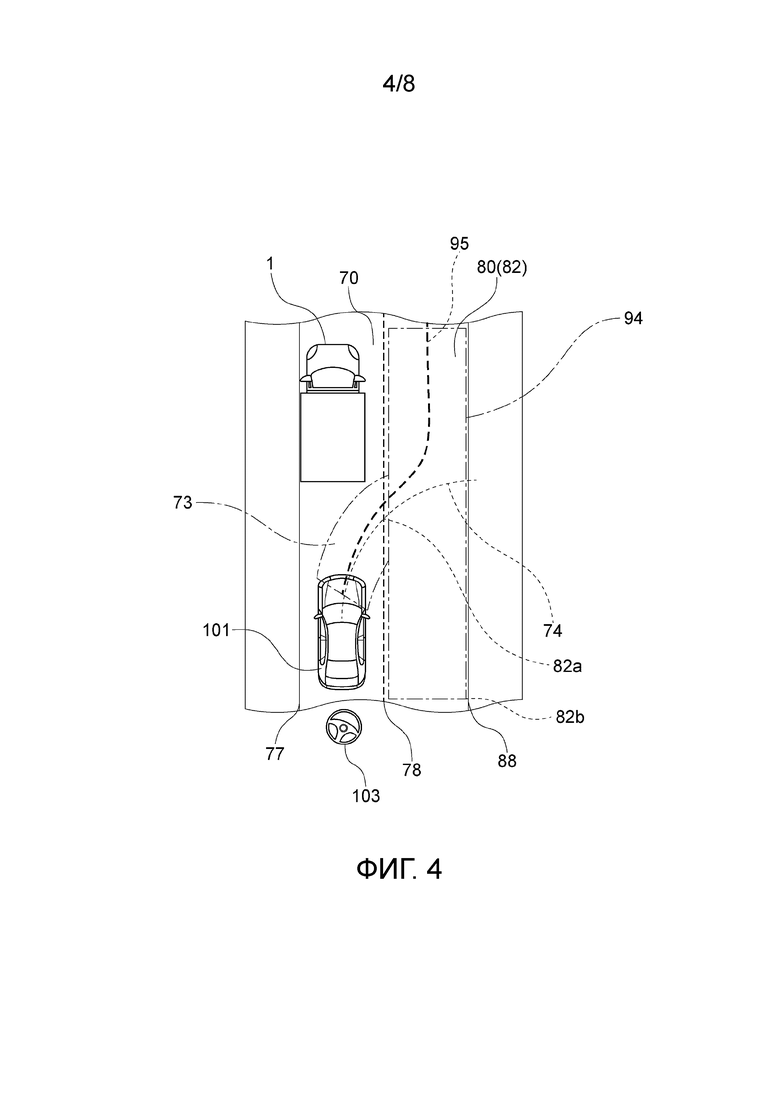
На Фиг.4 изображена схема, показывающая пример траектории движения задействуемого транспортного средства, сгенерированной устройством управления движением, показанным на Фиг.1.
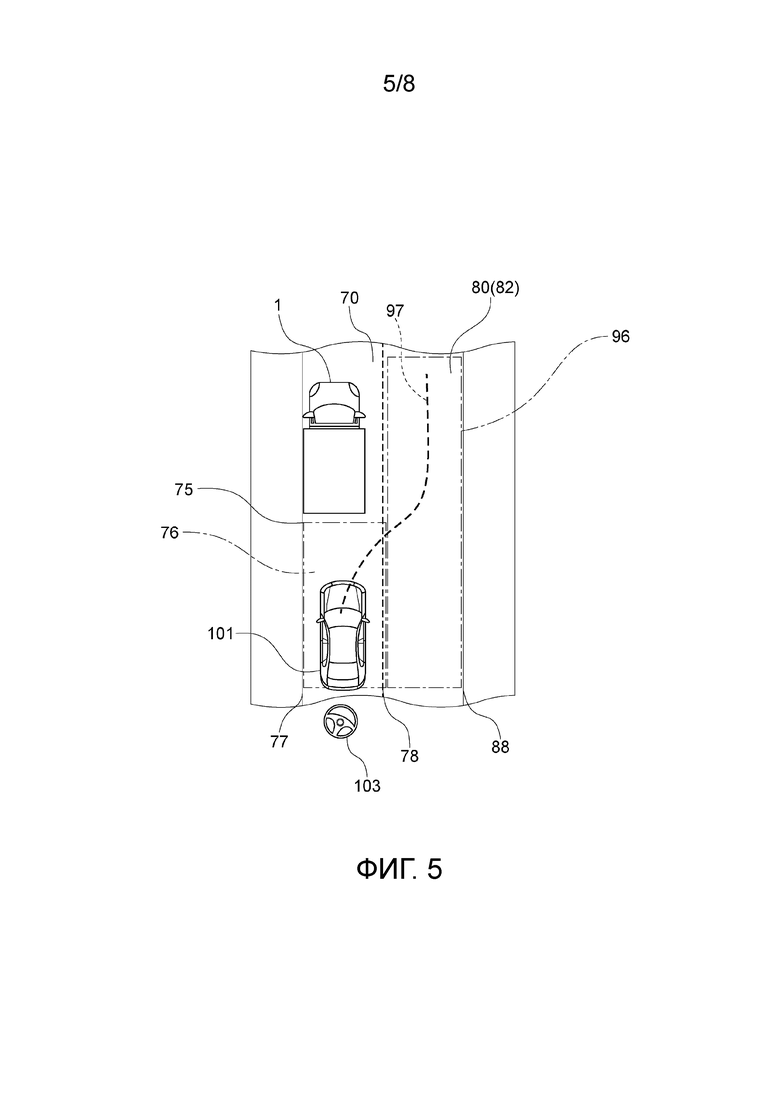
На Фиг.5 изображена схема, показывающая пример траектории движения задействуемого транспортного средства, сгенерированной устройством управления движением второго варианта осуществления.
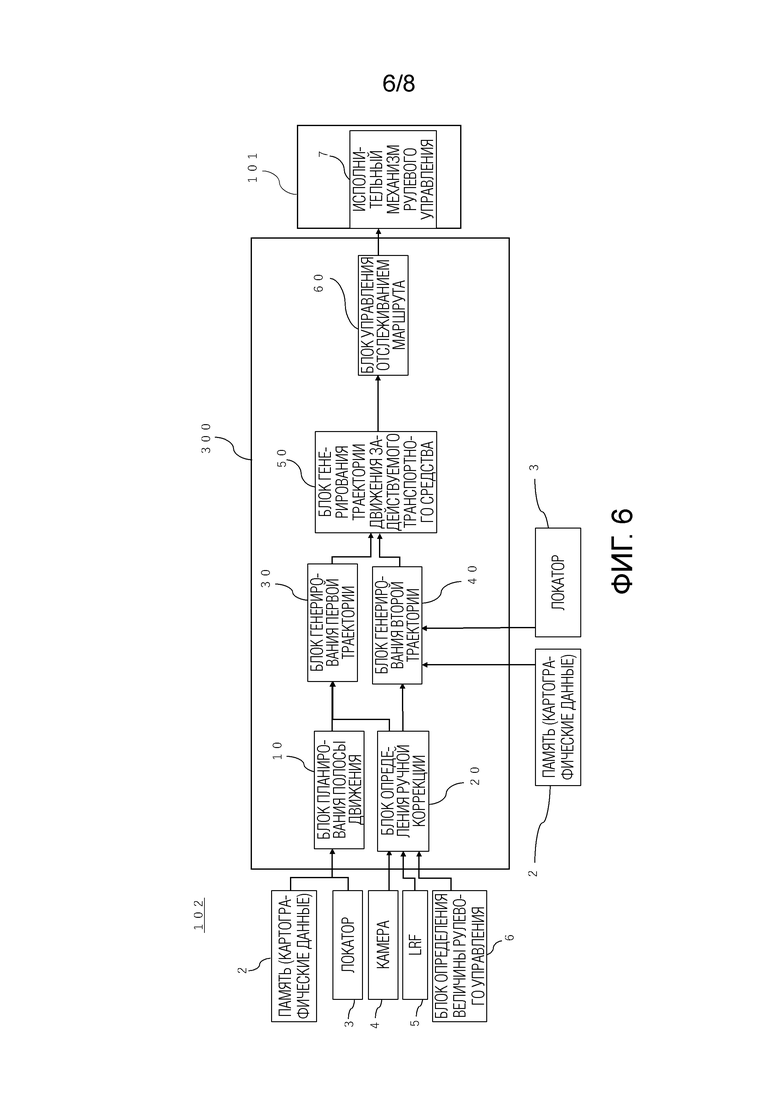
На Фиг.6 изображена блок-схема, показывающая конфигурацию системы управления движением, включающей в себя устройство управления движением согласно третьему варианту осуществления.
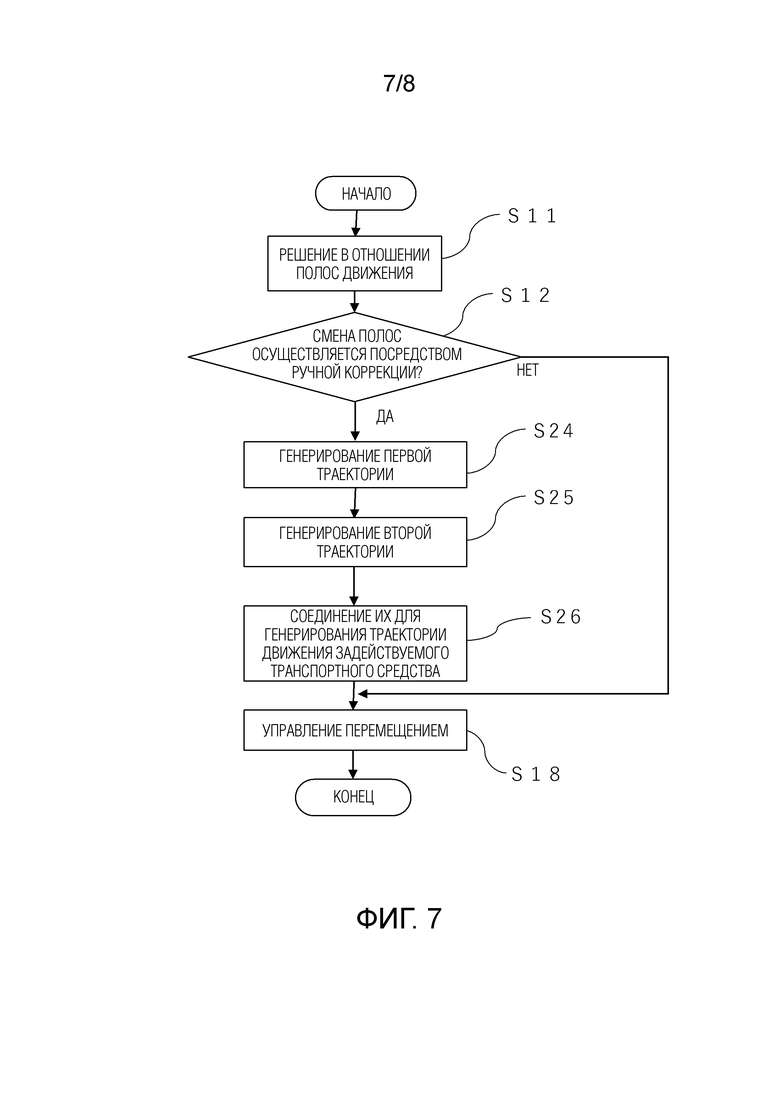
На Фиг.7 изображена блок-схема последовательности операций, показывающая способ генерирования траектории движения задействуемого транспортного средства устройством управления движением, показанным на Фиг.6.
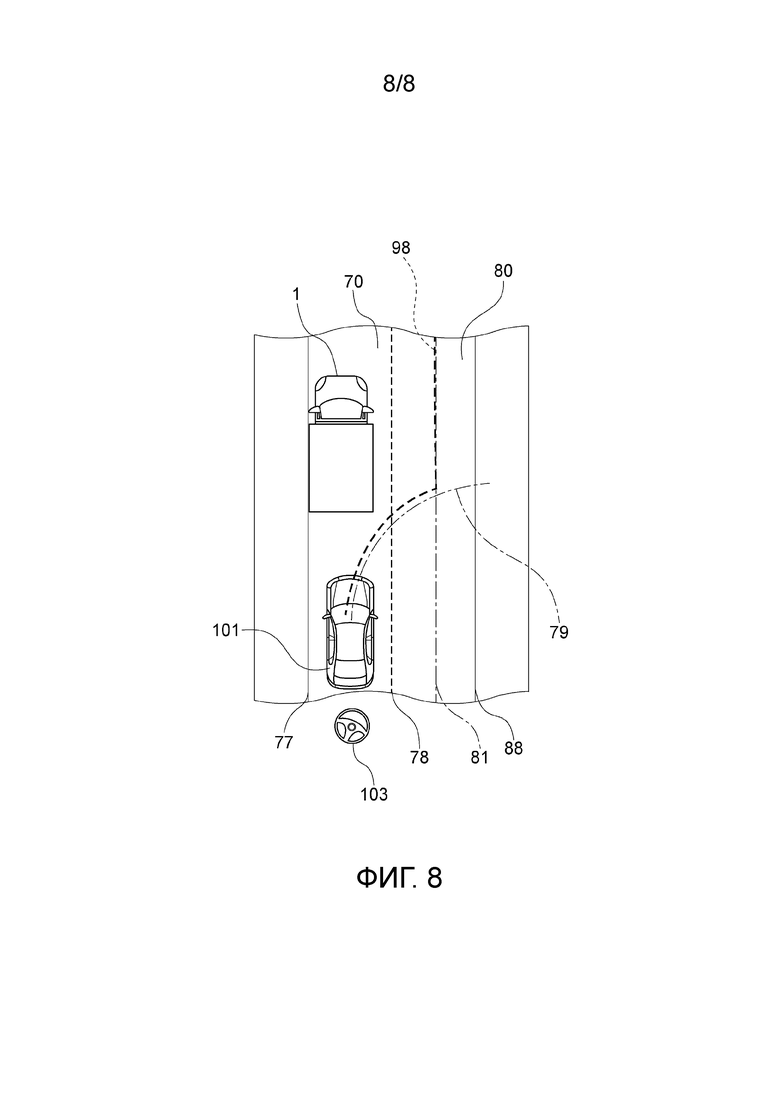
На Фиг.8 изображена схема, показывающая пример траектории движения задействуемого транспортного средства, сгенерированной устройством управления движением, показанным на Фиг.6.
[Режим(ы) для осуществления изобретения]
[0009]
Первый вариант осуществления
В дальнейшем устройство 100 управления движением для транспортного средства согласно первому варианту осуществления, которое является лучшим вариантом осуществления настоящего изобретения, будет описано со ссылкой на Фиг.1-4.
Как показано на Фиг.1, система 111 управления движением включает в себя устройство 100 управления движением, которое выполняет автоматическое управление вождением для автономного движения задействуемого транспортного средства 101. Система 111 управления движением включает в себя память 2, локатор 3, камеру 4, LRF (лазерный дальномер) 5, блок 6 определения величины рулевого управления и исполнительный механизм 7 рулевого управления. Устройство 100 управления движением управляет различными исполнительными механизмами, включающими в себя исполнительный механизм 7 рулевого управления, так что задействуемое транспортное средство 101 может двигаться автономно на основе информации, полученной из памяти 2, локатора 3, камеры 4, LRF 5 и блока 6 определения величины рулевого управления.
[0010]
Память 2 хранит информацию о трехмерной карте высокой четкости на основе формы дороги, обнаруженной, когда транспортное средство для сбора данных используется для движения по реальной дороге. Информация о трехмерной карте высокой четкости, хранящаяся в памяти 2, включает в себя, помимо информации о карте, информацию о границах, информацию о двумерном положении, информацию о трехмерном положении, информацию о дороге, информацию об атрибутах дороги, информацию о попутном направлении, информацию о встречном направлении, информацию о различении полос движения, информацию о полосах движения пункта назначения и т.п. в соответствующих координатах карты. Информация о дороге и информация об атрибутах дороги включают в себя такую информацию, как ширина дороги, радиус кривизны, структура обочины дороги, правила дорожного движения (ограничения скорости, возможность смены полосы движения и т.д.), точки слияния дорог, точки разветвления, пункты взимания платы, точки уменьшения количества полос движения, области обслуживания/парковки и т.д.
[0011]
Локатор 3 состоит из блока GPS, гироскопического датчика и датчика скорости транспортного средства и т.п. Локатор 3 обнаруживает радиоволны, передаваемые от множества спутниковых каналов связи блоком GPS, периодически получает информацию о положении задействуемого транспортного средства 101 и периодически обнаруживает информацию о текущем положении задействуемого транспортного средства 101 на основе полученной информации о положении задействуемого транспортного средства 101, информацию об изменении угла, полученную от гироскопического датчика, и скорость транспортного средства, полученную от датчика скорости транспортного средства.
[0012]
Камера 4 состоит из датчика изображения, такого как широкоугольная камера CCD. Камера предусмотрена на передней части, задней части и, соответственно, с обеих сторон. Камера получает информацию изображения посредством формирования изображения периферии задействуемого транспортного средства 101. Камера 4 может быть стереоскопической камерой или всенаправленной камерой и может включать в себя множество датчиков изображений. Камера 4 обнаруживает исходя из полученных данных изображения дорогу и строения, дорожные знаки, знаки, другие транспортные средства, двухколесные транспортные средства, велосипеды, пешеходов и т.п., существующие перед задействуемым транспортным средством 101, как окружающие условия задействуемого транспортного средства 101.
[0013]
LRF 5 выполнен на передней части, задней части и с обеих сторон задействуемого транспортного средства 101 и излучает миллиметровые волны или ультразвуковые волны на периферию задействуемого транспортного средства 101 для сканирования предварительно определенной области по периферии задействуемого транспортного средства 101. Таким образом, LRF 5 обнаруживает препятствия, такие как другие транспортные средства, мотоциклы, велосипеды, пешеходы, бордюры на обочинах дороги, ограждения, поверхности стен, насыпи и т.д., которые присутствуют вокруг задействуемого транспортного средства 101. Например, LRF5 обнаруживает относительное положение (азимут) между препятствием и задействуемым транспортным средством 101, относительную скорость препятствия, расстояние от задействуемого транспортного средства 101 до препятствия и т.п. в качестве окружающей ситуации задействуемого транспортного средства 101.
[0014]
Блок 6 определения величины рулевого управления является, например, датчиком для определения угла поворота рулевого вала (не показан) и определяет величину рулевого управления задействуемого транспортного средства 101.
[0015]
Исполнительный механизм 7 рулевого управления состоит, например, из двигателя, выполненного с возможностью передавать крутящий момент на рулевой вал, и управляет рулевым управлением задействуемого транспортного средства 101 в соответствии со значением команды автоматического управления процессом от устройства 100 управления движением или управлением рулевым колесом 103 от водителя.
[0016]
Устройство 100 управления движением выполнено с одним или более компьютерами и программным обеспечением, установленным на компьютерах. Устройство 100 управления движением включает в себя ROM, в котором хранится программа для выполнения функции автоматического управления процессом, CPU, который выполняет программу, хранящуюся в ROM, и RAM, которое функционирует как запоминающее устройство с возможностью доступа. Устройство 100 управления движением включает в себя блок 10 планирования полосы движения, блок 20 определения ручной коррекции, блок 31 генерирования первой проезжей области, блок 41 генерирования второй проезжей области, блок 45 составления, блок 50 генерирования траектории движения задействуемого транспортного средства и блок 60 управления отслеживанием маршрута.
[0017]
Далее будет описана схема общего управления устройством 100 управления движением со ссылкой на Фиг.2.
Сначала устройство 100 управления движением оценивает собственное положение на основе информации о положении и информации карты памяти 2 задействуемого транспортного средства 9, полученной локатором 3 (этап S1). Кроме того, устройство 100 управления движением распознает пешеходов или другие препятствия вокруг задействуемого транспортного средства 101 с помощью камеры 4 и LRF 5 (этап S2). Информация о собственном местоположении, оцененная на этапе S1, и информация о препятствии или подобном распознанном на этапе S2 представлены в информации карты, хранящейся в памяти 2 (этап S3).
[0018]
Кроме того, когда пункт назначения вводится водителем и вводится инструкция для начала управления автономным вождением, пункт назначения устанавливается в информации карты памяти 2 (этап S4), и выполняется планирование маршрута от текущего местоположения до пункта назначения (этап S5). Действия задействуемого транспортного средства 101 определяются на основе информации карты (этап S6). В частности, например, в каждом месте множества перекрестков, существующих на запланированном маршруте, определяется, в каком направлении задействуемое транспортное средство 101 поворачивает или тому подобное. Затем по информации карты памяти 2 выполняется планирование зоны вождения (этап S7). В частности, в заранее определенном положении или через заранее определенные интервалы на маршруте соответствующим образом устанавливается, по какой полосе движения должно двигаться задействуемое транспортное средство 101. Затем устройство 100 управления движением устанавливает целевую траекторию задействуемого транспортного средства 101 на основе информации о положении введенного текущего местоположения и пункта назначения, информации об установленном маршруте, информации о зоне вождения, информации о препятствиях, обнаруживаемых камерой 4 и LRF 5 и т.п. (этап S8). Кроме того, устройство 100 управления движением управляет перемещением различных исполнительный механизмов задействуемого транспортного средства 101, так что задействуемое транспортное средство 101 отслеживает целевую траекторию (этап S9).
[0019]
Способ управления движением для устройства 100 управления движением для установки траектории движения задействуемого транспортного средства в качестве целевой траектории на этапе S8, описанном на Фиг.2, будет описан более подробно со ссылкой на Фиг.1, 3 и 4.
Сначала, как показано на Фиг.3, блок 10 планирования полосы движения устройства 100 управления движением планирует зону вождения на основе картографических данных памяти 2 и информации о положении транспортного средства, оцененной локатором 3, и определяет, в какой полосе движения задействуемое транспортное средство 101 должно двигаться (этап S11). Здесь планирование зоны вождения блоком 10 планирования полосы движения соответствует этапу S7, показанному на Фиг.2. В примере на Фиг.4, блок 10 планирования полосы движения планирует зону вождения так, чтобы задействуемое транспортное средство 101 двигалось по первой полосе 70 движения с левой стороны. То есть блок 10 планирования полосы движения получает границу 77 с левого края и границу 78 с правой стороны первой полосы 70 движения и планирует зону вождения так, чтобы задействуемое транспортное средство 101 двигалось между границей 77 с левого края и границей 78 с правой стороны первой полосы 70 движения. Граница 78 на правой стороне первой полосы 70 движения является линией границы полосы движения между первой полосой 70 движения и второй полосой 80 движения, смежной с первой полосой 70 движения.
[0020]
Кроме того, как показано на Фиг.3, блок 20 определения ручной коррекции определяет, переключается ли или нет управление задействуемым транспортным средством 101 с автоматического управления вождением на состояние ручной коррекции, и осуществляет ли задействуемое транспортное средство смену полос движения (этап 12). В частности, как показано на Фиг.4, когда задействуемое транспортное средство 101 движется по первой полосе 70 движения посредством автоматического управления процессом устройства 100 управления движением, и присутствует припаркованное на улице транспортное средство 1 в направлении движения задействуемого транспортного средства 101, водитель управляет рулевым колесом 103 и пытается сменить полосу движения на соседнюю вторую полосу 80 движения, чтобы уклониться от припаркованного на улице транспортного средства 1. Таким образом, управление задействуемым транспортным средством 101 становится состоянием ручной коррекции, и задействуемое транспортное средство осуществляет смену полос движения. Ручная коррекция - это состояние, в котором водитель управляет задействуемым транспортным средством 101. То есть, когда управление задействуемым транспортным средством 101 находится в состоянии ручной коррекции, ручное управление процессом от водителя имеет приоритет перед автоматическим управлением процессом от устройства 100 управления движением. Вторая полоса 80 движения - это полоса движения, которая существует в направлении, в котором выполняется ручная коррекция задействуемого транспортного средства 101.
[0021]
Блок 20 определения ручной коррекции обнаруживает, что управление задействуемым транспортным средством 101 переключено в состояние ручной коррекции, посредством обнаружения управления рулевым управлением от водителя на основе величины рулевого управления, обнаруженной блоком 6 определения величины рулевого управления, и определяет, осуществляет ли задействуемое транспортное средство 101 смену полос движения. Кроме того, блок 20 определения ручной коррекции может прогнозировать, что задействуемое транспортное средство 101 осуществляет смену полос движения посредством ручной коррекции, когда припаркованное на улице транспортное средство 1 как препятствие обнаруживается камерой 4 и LRF 5, установленными на задействуемом транспортном средстве 101, и когда обнаруживается ручная коррекция задействуемого транспортного средства транспортное средство 101. Между прочим, препятствие, обнаруженное камерой 4 и LRF 5, установленным на задействуемом транспортном средстве 101, не ограничивается припаркованным на улице транспортным средством 1. Препятствием может быть впередиидущее транспортное средство, велосипед, мотоцикл и т.п.
[0022]
Когда определено, что задействуемое транспортное средство 101 не осуществляет смену полос движения посредством ручной коррекции на этапе S12 на Фиг.3, процесс переходит к этапу S13, и устройство 100 управления движением генерирует проезжую область вдоль первой полосы 70 движения. В этом случае проезжая область на второй полосе 80 движения не генерируется.
[0023]
С другой стороны, на этапе S12, когда определяется, что управление задействуемым транспортным средством 101 переключено в состояние ручной коррекции блоком 20 определения ручной коррекции, и задействуемое транспортное средство осуществляет смену полос движения, блок 31 генерирования первой проезжей области генерирует первую проезжую область 73, в которой может двигаться задействуемое транспортное средство 101, как показано на Фиг.4 (этап S14). Первая проезжая область 73 генерируется вдоль прогнозируемой траектории 74 движения, вычисленной в соответствии с текущим углом рулевого управления и текущей скоростью транспортного средства задействуемого транспортного средства 101 посредством управления рулевым управлением водителем. Прогнозируемая траектория 74 движения может быть вычислена согласно текущей скорости рыскания и текущей скорости транспортного средства задействуемого транспортного средства 101.
[0024]
Кроме того, когда определено, что управление задействуемым транспортным средством 101 переключено в состояние ручной коррекции блоком 20 определения ручной коррекции, и задействуемое транспортное средство 101 осуществляет смену полос движения на вторую полосу 80 движения, блок 41 генерирования второй проезжей области генерирует вторую проезжую область 82 так, чтобы вторая проезжая область соответствовала форме второй полосы 80 движения (этап S15). Положение второй полосы 80 движения распознается на основе информации карты, хранящейся в памяти 2, и информации о положении транспортного средства, оцененной локатором 3. Кроме того, блок 41 генерирования второй проезжей области получает левую границу 78 второй полосы 80 движения и правую границу 88 второй полосы 80 движения из информации карты из памяти 2. Таким образом, вторая проезжая область 82 генерируется между левой границей 78 и правой границей 88 второй полосы 80 движения. Между прочим, левая сторона границы 78 второй полосы 80 движения является линией границы полосы движения между первой полосой 70 движения и второй полосой 80 движения. Кроме того, как показано на Фиг.4, вторая проезжая область 82 генерируется исходя, по меньшей мере, из положения 82b на стороне задействуемого транспортного средства 101 в направлении движения первой полосы 70 движения относительно положения 82a, в котором прогнозируемая траектория 74 движения соприкасается со второй полосой 80 движения.
[0025]
На этапе S16 блок 45 составления объединяет первую проезжую область 73 и вторую проезжую область 82 для генерирования третьей проезжей области 94. Кроме того, блок 50 генерирования траектории движения задействуемого транспортного средства генерирует траекторию 95 движения задействуемого транспортного средства внутри третьей проезжей области 94 (этап S17). Кроме того, когда определено, что задействуемое транспортное средство 101 не осуществляет смену полос движения посредством ручной коррекции, блок 50 генерирования траектории движения задействуемого транспортного средства генерирует траекторию 95 движения задействуемого транспортного средства внутри проезжей области вдоль первой полосы 70 движения (этап S17). Здесь управление от определения ручной коррекции задействуемого транспортного средства 101 блоком 20 определения ручной коррекции до генерирования траектории 95 движения задействуемого транспортного средства блоком 50 генерирования траектории движения задействуемого транспортного средства соответствует управлению траекторией этапа S8, показанного на Фиг.2.
[0026]
Затем блок 60 управления отслеживанием маршрута управляет перемещением исполнительного механизма 7 рулевого управления задействуемого транспортного средства 101, так что задействуемое транспортное средство 101 движется по траектории 95 движения задействуемого транспортного средства (этап S18). Здесь, на первой полосе 70 движения, блок 60 управления отслеживанием маршрута управляет перемещением задействуемого транспортного средства 101, так что задействуемое транспортное средство 101 движется в первой проезжей области 73. Кроме того, на второй полосе 80 движения блок 60 управления отслеживанием маршрута управляет перемещением задействуемого транспортного средства 101, так что задействуемое транспортное средство 101 движется во второй проезжей области 82. Управление исполнительный механизмом 7 рулевого управления блоком 60 управления отслеживанием маршрута соответствует управлению перемещением задействуемого транспортного средства на этапе S9, показанном на Фиг.2.
[0027]
Как описано выше, когда определено, что задействуемое транспортное средство 101 осуществляет смену полос движения посредством ручной коррекции, устройство 100 управления движением согласно этому варианту осуществления генерирует третью проезжую область 94 посредством соединения первой проезжей области 73 и второй проезжей области 82. Первая проезжая область 73 генерируется в первой полосе 70 движения, по которой движется задействуемое транспортное средство 101. Кроме того, вторая проезжая область 82 генерируется во второй полосе 80 движения, которая существует в направлении, в котором выполняется ручная коррекция задействуемого транспортного средства 101. Затем устройство 100 управления движением генерирует траекторию 95 движения задействуемого транспортного средства в третьей проезжей области 94. Таким образом, когда задействуемое транспортное средство 101, движущееся автономно, осуществляет смену полос движения посредством ручной коррекции, устройство 100 управления движением плавно генерирует траекторию 95 движения задействуемого транспортного средства, по которой должно следовать задействуемое транспортное средство 101, отражая запрос водителя. Таким образом, управление перемещением задействуемого транспортного средства 101 может плавно вернуться к автоматическому управлению процессом снова из состояния ручной коррекции. Следовательно, движение задействуемого транспортного средства 101 во время смены полосы движения посредством ручной коррекции стабилизируется.
[0028]
Кроме того, устройство 100 управления движением согласно этому варианту осуществления генерирует проезжую область на первой полосе 70 движения, даже когда задействуемое транспортное средство 101 не осуществляет смену полос движения посредством ручной коррекции. Затем устройство 100 управления движением генерирует траекторию движения задействуемого транспортного средства, так что задействуемое транспортное средство 101 движется внутри проезжей области, сгенерированной в первой полосе 70 движения. В этом случае устройство 100 управления движением не генерирует проезжую область в соседней второй полосе 80 движения, так что задействуемое транспортное средство 101 продолжает стабильно двигаться по первой полосе 70 движения. Следовательно, устройство 100 управления движением согласно этому варианту осуществления генерирует вторую проезжую область 82 во второй полосе 80 движения в момент времени, когда смена полос движения необходима, в то время как, когда смена полос движения не требуется, генерирует траекторию движения задействуемого транспортного средства в проезжей области первой полосы 70 движения. Таким образом, даже когда задействуемое транспортное средство 101 не осуществляет смену полос движения посредством ручной коррекции, устройство 100 управления движением может соответствующим образом генерировать траекторию движения задействуемого транспортного средства, и задействуемое транспортное средство 101 может продолжать стабильно двигаться по первой полосе 70 движения.
[0029]
Кроме того, когда ручная коррекция обнаруживается, когда первая проезжая область 73 генерируется в первой полосе 70 движения, по которой движется задействуемое транспортное средство 101, вторая проезжая область 82 может генерироваться в соседней второй полосе 80 движения. То есть на блок-схеме последовательности операций на Фиг.3, хотя генерирование первой проезжей области показано как этап S14, процесс генерирования первой проезжей области 73 этапа S14 может происходить между этапом S11 и этапом S12 блок-схемы последовательности операций, показанной на Фиг.3. Когда определено, что задействуемое транспортное средство осуществляет смену полос движения посредством ручной коррекции на этапе S12, процесс может переходить с этапа S12 на этап S15.
[0030]
Кроме того, в этом варианте осуществления первая проезжая область 73 генерируется на основе прогнозируемой траектории 74 движения в соответствии с ручной коррекцией задействуемого транспортного средства 101. Таким образом, легко генерируется траектория 95 движения задействуемого транспортного средства на основе траектории движения, запрошенной водителем. Следовательно, траектория 95 движения задействуемого транспортного средства становится траекторией, отражающей запрос водителя, и, таким образом, становится возможным уменьшать неприятное ощущение, которое водитель испытывает во время движения задействуемого транспортного средства.
[0031]
Кроме того, вторая проезжая область 82 генерируется исходя, по меньшей мере, из положения 82b на стороне задействуемого транспортного средства 101 в направлении движения первой полосы 70 движения относительно положения 82a, в котором прогнозируемая траектория 74 движения соприкасается со второй полосой 80 движения. Таким образом, поскольку можно предотвратить разделение прогнозируемой траектории 74 движения и второй проезжей области 82, можно более надежно генерировать траекторию 95 движения задействуемого транспортного средства, движущегося с первой полосы 70 движения на вторую полосу 80 движения.
[0032]
Кроме того, вторая проезжая область 82 сгенерирована так, чтобы соответствовать форме второй полосы 80 движения и вдоль направления продолжения второй полосы 80 движения. Таким образом, задействуемое транспортное средство 101 может более плавно осуществлять смену полос движения на вторую полосу 80 движения по траектории 95 движения задействуемого транспортного средства.
[0033]
Кроме того, когда препятствие, такое как припаркованное на улице транспортное средство 1, обнаруживается на первой полосе 70 движения перед задействуемым транспортным средством 101, и обнаруживается ручная коррекция задействуемого транспортного средства 101, блок 20 определения ручной коррекции определяет, что задействуемое транспортное средство 101 осуществляет смену полос движения на вторую полосу 80 движения посредством ручной коррекции. Таким образом, устройство 100 управления движением может надежно генерировать третью проезжую область 94 и траекторию 95 движения задействуемого транспортного средства, и, таким образом, задействуемое транспортное средство 101 может более плавно осуществлять смену полос движения, уклоняясь при этом от препятствия.
[0034]
Кроме того, блок 60 управления отслеживанием маршрута устройства 100 управления движением управляет перемещением задействуемого транспортного средства 101, так что задействуемое транспортное средство 101 перемещается в первой проезжей области 73 по первой полосе 70 движения. Кроме того, на второй полосе 80 движения блок 60 управления отслеживанием маршрута управляет перемещением задействуемого транспортного средства 101, так что задействуемое транспортное средство 101 перемещается во второй проезжей области 82. Таким образом, устройство 300 управления движением может плавно вести задействуемое транспортное средство 101 по траектории 95 движения задействуемого транспортного средства, отражая управление рулевым управлением от водителя на движение задействуемого транспортного средства 101.
[0035]
Кроме того, первая проезжая область 73 генерируется на основе прогнозируемой траектории 74 движения, вычисленной исходя из текущего угла рулевого управления и текущей скорости транспортного средства задействуемого транспортного средства 101 или из текущей скорости рыскания и текущей скорости транспортного средства. Таким образом, устройство 100 управления движением может генерировать траекторию 95 движения задействуемого транспортного средства в соответствии с фактической ситуацией движения и запросом водителя.
[0036]
Кроме того, устройство 100 управления движением управляет перемещением задействуемого транспортного средства 101 так, что задействуемое транспортное средство 101 движется по траектории 95 движения задействуемого транспортного средства, замедляясь при этом в момент времени, когда задействуемое транспортное средство 101 осуществляет смену полос движения посредством ручной коррекции. Таким образом, задействуемое транспортное средство 101 может более надежно следовать траектории 95 движения задействуемого транспортного средства.
[0037]
Ширина первой проезжей области 73 является переменной, и когда водитель управляет рулевым колесом 103 дважды или более при смене полосы движения, ширина первой проезжей области 73 может быть уже. Поскольку ширина первой проезжей области 73 уже, управление рулевым управлением водителя в состоянии ручной коррекции сильнее отражается на генерировании траектории 95 движения задействуемого транспортного средства. С другой стороны, по мере того, как ширина первой проезжей области 73 становится больше, траектория 95 движения задействуемого транспортного средства становится более плавной. Кроме того, ширина первой проезжей области 73 может измениться в соответствии с режимом движения задействуемого транспортного средства 101.
[0038]
Второй вариант осуществления
Далее устройство 200 управления движением согласно второму варианту осуществления настоящего изобретения будет описано со ссылкой на Фиг.5. В этом варианте осуществления первая проезжая область 76, третья проезжая область 96 и траектория 97 движения задействуемого транспортного средства сформированы в варианте, отличном от первой проезжей области 73, третьей проезжей области 94 и траектории 95 движения задействуемого транспортного средства первого варианта осуществления. Устройство 200 управления движением согласно второму варианту осуществления имеет ту же конфигурацию, что и устройство 100 управления движением согласно первому варианту осуществления, показанному на Фиг.1. Кроме того, алгоритм способа управления движением для задания траектории 97 движения задействуемого транспортного средства устройством 200 управления движением аналогичен последовательности операций, показанной на Фиг.4. Кроме того, те же ссылочные позиции, что и на Фиг.1-4 обозначают одинаковые или подобные компоненты, поэтому их подробное описание будет опущено.
[0039]
Как показано на Фиг.5, когда на первой полосе 70 движения перед задействуемым транспортным средством 101 находится припаркованное на улице транспортное средство 1, камеры 4 и LRF 5 обнаруживают припаркованное на улице транспортное средство 1 как препятствие. Затем блок 20 определения ручной коррекции обнаруживает ручную коррекцию задействуемого транспортного средства 101 и определяет, что задействуемое транспортное средство 101 осуществляет смену полос движения на вторую полосу 80 движения посредством ручной коррекции. Когда определено, что управление задействуемым транспортным средством 101 переключено в состояние ручной коррекции, и задействуемое транспортное средство осуществляет смену полос движения, блок 31 генерирования первой проезжей области генерирует первую проезжую область 76, которая соответствует форме первой полосы 70 движения. Первая проезжая область 76 генерируется на первой полосе 70 движения до точки 75 на передней стороне припаркованного на улице транспортного средства 1.
[0040]
Кроме того, когда блок 20 определения ручной коррекции определяет, что управление задействуемым транспортным средством 101 переключено в состояние ручной коррекции, и задействуемое транспортное средство 101 осуществляет смену полос движения на вторую полосу 80 движения, блок 41 генерирования второй проезжей области генерирует вторую проезжую область 82 вдоль второй полосы 80 движения.
[0041]
Затем блок 45 составления объединяет первую проезжую область 76 и вторую проезжую область 82 для генерирования третьей проезжей области 96. Кроме того, блок 50 генерирования траектории движения задействуемого транспортного средства генерирует траекторию 97 движения задействуемого транспортного средства в третьей проезжей области 96.
[0042]
Как описано выше, устройство 200 управления движением согласно этому варианту осуществления генерирует первую проезжую область 76, соответствующую форме первой полосы 70 движения, и генерирует вторую проезжую область 82, соответствующую форме второй полосы 80 движения. Затем первая проезжая область 76 и вторая проезжая область 82 соединяются, генерируется третья проезжая область 96. Устройство 200 управления движением генерирует траекторию 97 движения задействуемого транспортного средства в третьей проезжей области 96. Таким образом, поскольку область, в которой может двигаться задействуемое транспортное средство 101, может быть широко задана, область, в которой может генерироваться траектория 97 движения задействуемого транспортного средства, расширяется. Следовательно, можно генерировать траекторию 97 движения задействуемого транспортного средства, которая не вызывает ощущения странности у пассажира, находящегося в задействуемом транспортном средстве 101.
[0043]
Первая проезжая область 76 генерируется на первой полосе 70 движения до точки 75 перед припаркованном на улице транспортным средством 1 как препятствие, обнаруженное камерой 4 и LRF 5. В результате задействуемое транспортное средство 101 может плавно менять полосу движения, надежно избегая при этом припаркованное на улице транспортное средство 1.
[0044]
Третий вариант осуществления
Далее устройство 300 управления движением согласно третьему варианту осуществления настоящего изобретения будет описано со ссылкой на Фиг.6-8. Те же ссылочные позиции, что и на Фиг.1-5 описывают одинаковые или подобные компоненты, поэтому их подробное описание опущено.
[0045]
Устройство 300 управления движением системы 102 управления, показанное на Фиг.6, заменяет блок 31 генерирования первой проезжей области устройства 100 управления движением, показанный на Фиг.1, на блок 30 генерирования первый траектории и блок 41 генерирования второй проезжей области устройства 100 управления движением, показанного на фиг.1, на блока 40 генерирования второй траектории, соответственно. Кроме того, устройство 300 управления движением не имеет конфигурации, соответствующей блоку 45 составления устройства 100 управления движением.
[0046]
Как показано на Фиг.7 и 8, когда блок 20 определения ручной коррекции определяет, что управление задействуемым транспортным средством 101 переключено в состояние ручной коррекции и задействуемое транспортное средство 101 осуществляет смену полос движения, блок 30 генерирования первой траектории генерирует первую траекторию 79 в соответствии с ручной коррекцией задействуемого транспортного средства 101 (этап S24). В частности, первая траектория 79 генерируется в соответствии с текущим углом рулевого управления и текущей скоростью транспортного средства 101 посредством управления рулевым управлением от водителя. Первая траектория 79 может генерироваться согласно текущей скорости рыскания и текущей скорости транспортного средства задействуемого транспортного средства 101.
[0047]
Кроме того, когда блок 20 определения ручной коррекции определяет, что управление задействуемым транспортным средством 101 переключено в состояние ручной коррекции и задействуемое транспортное средство 101 осуществляет смену полос движения на вторую полосу 80 движения, блок 40 генерирования второй траектории генерирует вторую траекторию 81 вдоль второй полосы 80 движения (этап S25). Вторая траектория 81 генерируется для прохождения через центр между границами 78, 88 второй полосы 80 движения.
[0048]
Затем блок 50 генерирования траектории движения задействуемого транспортного средства объединяет первую траекторию 79 и вторую траекторию 81 для генерирования траектории 98 движения задействуемого транспортного средства (этап S26). Кроме того, блок 60 управления отслеживанием маршрута управляет перемещением исполнительного механизма 7 рулевого управления задействуемого транспортного средства 101, так что задействуемое транспортное средство 101 движется по траектории 98 движения задействуемого транспортного средства (этап S18). Когда на этапе S12 определяется, что задействуемое транспортное средство 101 не осуществляет смену полос движения посредством ручной коррекции, на этапе S18 блок 60 управления отслеживанием маршрута управляет перемещением задействуемого транспортного средства 101, так что задействуемое транспортное средство 101 следует траектории движения задействуемого транспортного средства и двигается по первой полосе 70 движения.
[0049]
Здесь определение ручной коррекции задействуемого транспортного средства 101 блоком 20 определения ручной коррекции, генерирование первой траектории 79 блоком 30 генерирования первой траектории, генерирование второй траектории 81 блоком 40генерирования второй траектории и генерирование траектории 98 движения задействуемого транспортного средства блоком 50 генерирования траектории движения задействуемого транспортного средства соответствуют управлению траекторией на этапе S8, показанном на Фиг.2.
[0050]
Как описано выше, устройство 300 управления движением согласно этому варианту осуществления соединяет первую траекторию 79 и вторую траекторию 81 для генерирования траектории 98 движения задействуемого транспортного средства, когда задействуемое транспортное средство 101 осуществляет смену полос движения посредством ручной коррекции. Затем устройство 300 управления движением управляет исполнительный механизмом 7 рулевого управления задействуемого транспортного средства 101, так что задействуемое транспортное средство 101 движется по траектории 98 движения задействуемого транспортного средства. Таким образом, когда задействуемое транспортное средство 101, движущееся автономно, осуществляет смену полос движения посредством ручной коррекции, управление перемещением задействуемого транспортного средства 101 может плавно вернуться из состояния ручной коррекции снова к автономному управлению вождением. Следовательно, перемещение задействуемого транспортного средства 101 во время смены полос движения за счет ручной коррекции стабилизируется.
[0051]
Первая траектория 79 генерируется в соответствии с текущим углом рулевого управления и текущей скоростью транспортного средства или в соответствии с текущей скоростью рыскания и текущей скоростью транспортного средства задействуемого транспортного средства 101. Таким образом, устройство 300 управления движением может генерировать траекторию 98 движения задействуемого транспортного средства в соответствии с фактической ситуацией движения и запросом водителя.
[0052]
В этом варианте осуществления устройство 300 управления движением может генерировать траекторию 98 движения задействуемого транспортного средства на основе первой траектории 79 в соответствии с ручной коррекцией задействуемого транспортного средства 101 и второй проезжей области 82, сгенерированной, чтобы соответствовать форме второй полосы 80 движения, как показано на Фиг.4.
[0053]
Кроме того, в вариантах осуществления с первого по третий, задействуемое транспортное средство 101 может осуществлять смену полос движения посредством ручной коррекции после короткой остановки перед припаркованным на улице транспортным средством 1. Кроме того, когда задействуемое транспортное средство 101 замедляется перед припаркованным на улице транспортным средством 1, чтобы осуществить смену полос движения, замедление задействуемого транспортного средства 101 может быть изменено в соответствии с величиной рулевого управления от водителя во время состояния ручной коррекции.
[0054]
Первая полоса 70 движения соответствует текущей полосе движения согласно настоящему изобретению, а вторая полоса 80 движения соответствует другой полосе движения согласно настоящему изобретению.
[Описание ссылочных позиций]
[0055]
100, 200, 300 … Устройство управления движением
101 Задействуемое транспортное средство
1 Припаркованное на улице транспортное средство
2 Память
3 Локатор
4 Камера
5 LRF (лазерный дальномер)
6 Блок определения величины рулевого управления
7 Исполнительный механизм рулевого управления
10 Блок планирования полосы движения
20 Блок определения ручной коррекции
30 Блок генерирования первой траектории
31 Блок генерирования первой проезжей области
40 Блок генерирования второй траектории
41 Блок генерирования второй проезжей области
45 Блок составления
50 Блок генерирования траектории движения задействуемого транспортного средства
60 Блок управления отслеживанием маршрута
70 Первая полоса движения (Текущая полоса движения)
79 Первая траектория
73, 76 Первая проезжая область
74 Прогнозируемая траектория движения
80 Вторая полоса движения (другая полоса движения)
81 Вторая траектория
82 Вторая проезжая область
95, 97, 98 Траектория движения задействуемого транспортного средства
94, 96 Третья проезжая область
Изобретение относится к способу и устройству управления движением задействуемого транспортного средства. Способ управления движением для транспортного средства содержит этап, на котором определяют, осуществляет ли задействуемое транспортное средство смену полос движения на другую полосу движения посредством ручной коррекции, при определении того, что задействуемое транспортное средство осуществляет смену полос движения посредством ручной коррекции, генерируют первую проезжую область в текущей полосе движения. Первая проезжая область является областью, в которой может двигаться задействуемое транспортное средство. Также генерируют вторую проезжую область вдоль другой полосы движения, расположенную в направлении, в котором выполняется ручная коррекция задействуемого транспортного средства, и генерируют третью проезжую область посредством соединения первой проезжей области и второй проезжей области. Траекторию движения задействуемого транспортного средства генерируют внутри третьей проезжей области на основе траектории, отражающей управление рулевым управлением в течение состояния ручной коррекции в первой проезжей области и когда задействуемое транспортное средство осуществляет смену полос движения посредством ручной коррекции. Повышается безопасность при смене полосы движения. 4 н. и 12 з.п. ф-лы, 8 ил.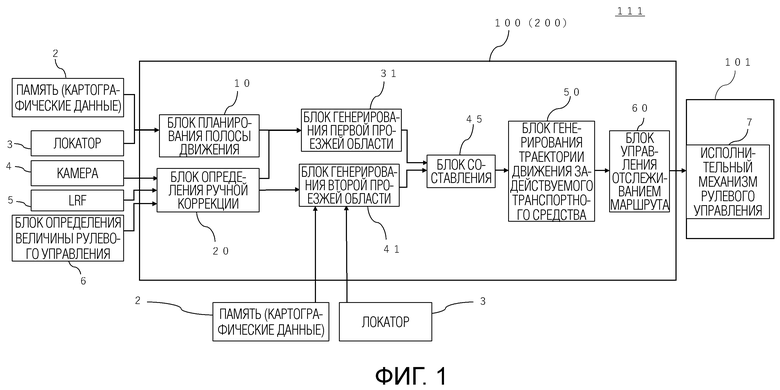
1. Способ управления движением для транспортного средства, содержащий этапы, на которых:
определяют, осуществляет ли задействуемое транспортное средство, автономно движущееся по текущей полосе движения, смену полос движения на другую полосу движения, отличную от текущей полосы движения, посредством ручной коррекции;
при определении того, что задействуемое транспортное средство осуществляет смену полос движения посредством ручной коррекции, генерируют первую проезжую область в текущей полосе движения, причем первая проезжая область является областью, в которой может двигаться задействуемое транспортное средство;
генерируют вторую проезжую область вдоль другой полосы движения, расположенной в направлении, в котором выполняется ручная коррекция задействуемого транспортного средства, при этом вторая проезжая область является областью, в которой может двигаться задействуемое транспортное средство;
генерируют третью проезжую область посредством соединения первой проезжей области и второй проезжей области;
генерируют траекторию движения задействуемого транспортного средства внутри третьей проезжей области на основе траектории, отражающей управление рулевым управлением в течение состояния ручной коррекции в первой проезжей области, и траектории вдоль другой полосы движения во второй проезжей области; и
когда задействуемое транспортное средство осуществляет смену полос движения посредством ручной коррекции, управляют перемещением задействуемого транспортного средства так, чтобы задействуемое транспортное средство двигалось по траектории движения задействуемого транспортного средства.
2. Способ управления движением для транспортного средства по п.1, в котором первая проезжая область генерируется на основе прогнозируемой траектории движения в соответствии с ручной коррекцией задействуемого транспортного средства.
3. Способ управления движением для транспортного средства по п.2, в котором первая проезжая область генерируется на основе прогнозируемой траектории движения, вычисленной исходя из текущего угла рулевого управления и текущей скорости транспортного средства задействуемого транспортного средства.
4. Способ управления движением для транспортного средства по п.2, в котором первая проезжая область генерируется на основе прогнозируемой траектории движения, вычисленной исходя из текущей скорости рыскания и текущей скорости транспортного средства задействуемого транспортного средства.
5. Способ управления движением для транспортного средства по любому одному из пп.2-4, в котором вторая проезжая область генерируется исходя из, по меньшей мере, положения на стороне задействуемого транспортного средства в направлении движения текущей полосы движения относительно положения, в котором прогнозируемая траектория движения соприкасается с другой полосой движения.
6. Способ управления движением для транспортного средства по любому одному из пп.1-5, в котором вторая проезжая область генерируется, чтобы соответствовать форме другой полосы движения.
7. Способ управления движением для транспортного средства по любому одному из пп.1-6, содержащий этап, на котором, при обнаружении препятствия в текущей полосе движения перед задействуемым транспортным средством и обнаружении ручной коррекции задействуемого транспортного средства, определяют, что задействуемое транспортное средство осуществляет смену полос движения на другую полосу движения посредством ручной коррекции.
8. Способ управления движением для транспортного средства по п.1, в котором первая проезжая область генерируется, чтобы соответствовать форме текущей полосы движения, по которой движется задействуемое транспортное средство.
9. Способ управления движением для транспортного средства по п.8, содержащий этапы, на которых,
при обнаружении препятствия в текущей полосе движения перед задействуемым транспортным средством и обнаружении ручной коррекции задействуемого транспортного средства, определяют, что задействуемое транспортное средство осуществляет смену полос движения на другую полосу движения посредством ручной коррекции, и
генерируют первую проезжую область вдоль текущей полосы движения до точки на ближней стороне препятствия.
10. Способ управления движением для транспортного средства по любому одному из пп.1-9, в котором управление перемещением задействуемого транспортного средства так, чтобы задействуемое транспортное средство двигалось по траектории движения задействуемого транспортного средства, содержит этапы, на которых:
в текущей полосе движения, управляют перемещением задействуемого транспортного средства так, чтобы задействуемое транспортное средство двигалось в первой проезжей области, и
управляют перемещением задействуемого транспортного средства так, чтобы задействуемое транспортное средство двигалось во второй проезжей области в другой полосе движения.
11. Способ управления движением для транспортного средства по любому одному из пп.1-10, содержащий этап, на котором управляют перемещением задействуемого транспортного средства так, чтобы задействуемое транспортное средство замедлялось в момент времени, когда задействуемое транспортное средство осуществляет смену полос движения посредством ручной коррекции.
12. Способ управления движением для транспортного средства, содержащий этапы, на которых:
определяют, осуществляет ли задействуемое транспортное средство, автономно движущееся по текущей полосе движения, смену полос движения на другую полосу движения, отличную от текущей полосы движения, посредством ручной коррекции;
когда определено, что задействуемое транспортное средство осуществляет смену полос движения посредством ручной коррекции, генерируют первую траекторию в соответствии с ручной коррекцией задействуемого транспортного средства;
генерируют вторую проезжую область вдоль другой полосы движения, расположенной в направлении, в котором выполняется ручная коррекция задействуемого транспортного средства, при этом вторая проезжая область является областью, в которой может двигаться задействуемое транспортное средство;
генерируют траекторию движения задействуемого транспортного средства на основе первой траектории и второй проезжей области; и
когда задействуемое транспортное средство осуществляет смену полос движения посредством ручной коррекции, управляют перемещением задействуемого транспортного средства так, чтобы задействуемое транспортное средство двигалось по траектории движения задействуемого транспортного средства.
13. Способ управления движением для транспортного средства, содержащий этапы, на которых:
определяют, осуществляет ли задействуемое транспортное средство, автономно движущееся по текущей полосе движения, смену полос движения на другую полосу движения, отличную от текущей полосы движения, посредством ручной коррекции;
когда определено, что задействуемое транспортное средство осуществляет смену полос движения посредством ручной коррекции, генерируют первую траекторию в соответствии с ручной коррекцией задействуемого транспортного средства;
генерируют вторую траекторию вдоль другой полосы движения, отличной от текущей полосы движения;
генерируют траекторию движения задействуемого транспортного средства посредством соединения первой траектории и второй траектории; и
когда задействуемое транспортное средство осуществляет смену полос движения посредством ручной коррекции, управляют перемещением задействуемого транспортного средства так, чтобы задействуемое транспортное средство двигалось по траектории движения задействуемого транспортного средства.
14. Способ управления движением для транспортного средства по п.13, в котором первая траектория генерируется в соответствии с текущим углом рулевого управления и скоростью транспортного средства задействуемого транспортного средства.
15. Способ управления движением для транспортного средства по п.13, в котором первая траектория генерируется в соответствии с текущей скоростью рыскания и скоростью транспортного средства задействуемого транспортного средства.
16. Устройство управления движением для транспортного средства, содержащее:
блок определения ручной коррекции, определяющий, осуществляет ли задействуемое транспортное средство, автономно движущееся по текущей полосе движения, смену полос движения на другую полосу движения, отличную от текущей полосы движения, посредством ручной коррекции;
блок генерирования первой проезжей области, который, при определении того, что задействуемое транспортное средство осуществляет смену полос движения посредством ручной коррекции, генерирует первую проезжую область в текущей полосе движения, причем первая проезжая область является областью, в которой может двигаться задействуемое транспортное средство;
блок генерирования второй проезжей области, генерирующий вторую проезжую область вдоль другой полосы движения, расположенной в направлении, в котором выполняется ручная коррекция задействуемого транспортного средства, причем вторая проезжая область является областью, в которой может двигаться задействуемое транспортное средство;
блок составления, генерирующий третью проезжую область посредством соединения первой проезжей области и второй проезжей области;
блок генерирования траектории движения задействуемого транспортного средства, генерирующий траекторию движения задействуемого транспортного средства внутри третьей проезжей области на основе траектории, отражающей управление рулевым управлением в течение состояния ручной коррекции в первой проезжей области, и траектории вдоль другой полосы движения во второй проезжей области; и
блок управления отслеживанием маршрута, который, когда задействуемое транспортное средство осуществляет смену полос движения посредством ручной коррекции, управляет перемещением задействуемого транспортного средства так, чтобы задействуемое транспортное средство двигалось по траектории движения задействуемого транспортного средства.
| US 20190049974 A1, 14.02.2019 | |||
| JP 2018202876 A, 27.12.2018 | |||
| JP 2018203120 A, 27.12.2018 | |||
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 2015 |
|
RU2688553C1 |

