Изобретение относится к радиолокационным способам обнаружения и определения подвижных и неподвижных надводных объектов, их координат и параметров движения на дальностях прямой видимости до 800 км с использованием радиолокаторов на летательных аппаратах.
Достигаемый технический результат - создание бортового радиолокационного устройства, с расширенными функциональными возможностями, обладающего высокими радиотехническими характеристиками, при очень ограниченных массогабаритных и энергетических ресурсах, необходимых для функционирования.
Известны радиолокаторы кругового обзора, размещаемые на самолетах, антенные системы которых расположены под обтекателем, над фюзеляжем (патент США №3656164, МКИ HOIQ 1/28), что существенно ухудшает аэродинамические характеристики самолета. Известен также самолетный радиолокатор кругового обзора, антенна которого выполнена из нескольких секций, размещенных под обтекателем внутри крыльев и по бортам фюзеляжа (патент США №4336543, МКИ HOIQ 1/28), недостатком которого является различная разрешающая способность радиолокатора в азимутальной плоскости из-за различных габаритов антенн, располагаемых в элементах конструкции самолета.
Наиболее близким аналогом к заявленному способу и устройству является неподвижная антенна для радиолокатора с круговой зоной обзора, формирующая луч, вращающийся в азимутальной плоскости, обеспечивающий круговой обзор пространства и обнаружение радиолокационного видимых объектов, выполненная в виде кольцевой активной фазированной антенной решетки, содержащей приемопередающие модули (см. Материалы XIV отраслевого координационного семинара по СВЧ-технике, Нижний Новгород, 2005 г., стр. 168-172).
Однако, для обеспечения необходимой дальности до 800 км обнаружение радиолокационно-видимых объектов в пределах прямой видимости требует высоты подъема радиолокатора до 45-60 км и является весьма сложно реализуемой задачей.
Целью данного изобретения является обеспечение существенного повышения дальности обнаружения радиолокационно-видимых на морской поверхности объектов, повышение точности определения их координат и параметров движения и передачи этих данных на приемные пункты.
Предлагается способ радиолокационного обзора морской поверхности, заключающийся в ее круговом обзоре за счет горизонтального перемещения луча антенны радиолокатора в азимутальной плоскости и вертикального перемещения луча этой антенны в угломестной плоскости, при этом радиолокатор выполнен с возможностью, в процессе обзора морской поверхности, перемещаться по вертикали относительно Земли в точке старта вращаясь вокруг оси перемещения, обеспечивая вращение луча антенны в азимутальной плоскости с перемещением направления сектора обзора морской поверхности лучом антенны радиолокатора в вертикальной плоскости в сторону большей дальности обзора в интервале от не менее 40 км до 800 км синхронно с вертикальным перемещением радиолокатора, что обеспечивает перемещение сектора обзора лучом антенны радиолокатора морской поверхности по спирали с перекрытием соседних участков наблюдения до 70% и в горизонтальной плоскости синхронно со скоростью вращения радиолокатора вокруг оси перемещения в вертикальном направлении, а принятая информация о его текущих координатах и обнаруженных объектах передается на приемные пункты.
Предлагаемый способ представлен в устройстве радиолокационного обзора морской поверхности содержащем радиолокатор, антенна которого выполнена с возможностью кругового обзора в азимутальной плоскости и вертикального обзора в угломестной плоскости, радиолокатор размещен на ракете вертикального старта и полета с вращением вокруг своей продольной оси, при этом антенна радиолокатора выполнена в виде прямоугольного антенного полотна с электронным управлением направления луча АФАР, размещенного под радиопрозрачным обтекателем вдоль боковой поверхности ракеты, размеры которого в поперечной плоскости составляют не более 15 длин волн минимальной частоты рабочего диапазона радиолокатора, а в продольной плоскости ракеты не более 150 длин волн минимальной частоты рабочего диапазона радиолокатора, состоящего из отдельных размещенных по длине антенны приемо-передающих модулей, последовательно включаемых по длине антенны по мере подъема ракеты, а в состав радиолокатора введены блоки синхронизации управления положением луча с учетом движения ракеты по вертикали, колебаний ракеты в процессе полета, а также скорости ее вращения вокруг продольной оси по сигналам от бортовой системы управления ракеты, при этом радиолокатор выполнен с возможностью работы, как в обзорном режиме, так и в режиме с синтезированной апертурой антенны, а на борту ракеты установлена аппаратура передачи информации с радиолокатора на приемные пункты и приема информации с командного пункта.
При этом на ракете установлена аппаратура и средства активной радиотехнической и радиотепловой защиты и противодействия средствам обнаружения и поражения высокоточным оружием, а также установлена аппаратура и средства самоликвидации ракеты по завершению обзора морской поверхности и передачи этой информации на приемные пункты.
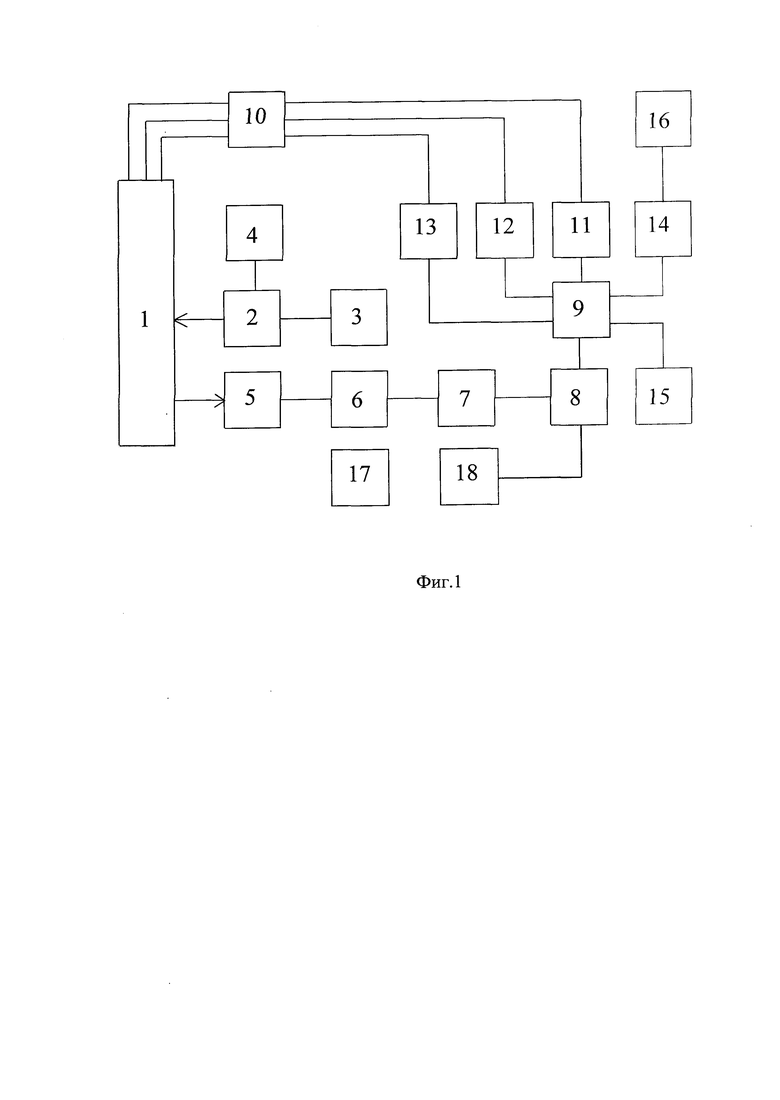
На Фиг. 1 изображен общий вид устройства радиолокационного обзора морской поверхности.
В состав устройства входят:
1. АФАР (антенна с приемо-передающими модулями)
2. Задающий генератор
3. Опорный генератор
4. Модулятор
5. Приемник
6. Усилитель промежуточных частот
7. Аналого-цифровой преобразователь
8. Блок обработки цифровой информации, полученной с радиолокатора и управления режимами работы радиолокатора
9. Бортовая система управления ракетой
10. Система цифрового управления лучом радиолокатора
11. Блок синхронизации положения луча с высотой полета ракеты
12. Блок синхронизации положения луча с учетом колебания ракеты в процессе полета
13. Блок синхронизации положения луча со скоростью вращения ракеты
14. Приемная аппаратура для приема информации с командного пункта по каналу Земля-борт
15. Передающая аппаратура передачи информации с радиолокатора на приемные пункты
16. Средства самоликвидации ракеты
17. Автономная система активной радиотехнической и радиотепловой защиты и противодействия средствам обнаружения и поражения высокоточным оружием
18. Автономный блок питания радиолокатора.
Радиолокационная система обзора морской поверхности работает следующим образом.
Ракета с размещенным на ней радиолокатором располагается на носителе в дежурном режиме. По команде с вышестоящего командного пункта на носитель поступает команда на пуск ракеты. С носителя на ракету поступает полетное задание и выполняется вертикальный пуск ракеты с закруткой вокруг продольной оси. По команде с бортового системы управления включается радиолокатор. С опорного генератора 3 сигнал поступает на задающий генератор 2 модулируемая модулятором 4 и поступает в АФАР в тракты приемо-передающих модулей и излучается антеннами модулей. Осуществляется круговой обзор лучом радиолокатора в азимутальной плоскости морской поверхности, начиная с минимально необходимой дальности обнаружения, например 40 км, а в вертикальной плоскости выполняется сканирование лучом до горизонта при данной высоте. Управление лучом осуществляется цифровым способом системой управления лучом 10, на которую действует система управления ракетой 9 и поступает информация по синхронизации положения луча с текущей высотой полета ракеты 11 с учетом колебаний ракеты в процессе полета 12 и со скоростью вращения ракеты. Принятый сигнал радиолокатора поступает в приемные тракты приемо-передающих модулей и затем поступает в приемник 5, усиливается усилителем промежуточной частоты 6, в аналого-цифровом преобразователе преобразуется в цифровой код, поступает в блок обработки цифровой информации и управления режимами работы радиолокатора 8. Полученная после обработки цифровая информация по передающей аппаратуре 15 передается на приемные пункты. Радиолокатор выполнен с возможностью проведения анализа полученной информации и выявления предполагаемых целей и переходом с обзорного режима на режим синтезированной апертурой для проведения съемки с более высоким разрешением для более детального анализа выявленной информации с последующим возвратом на обзорный режим.
При этом по мере подъема над земной поверхностью и увеличении зоны обзора в АФАР последовательно подключаются приемо-передающие модули по длине антенны.
Также на борту ракеты дополнительно установлена аппаратура и средства активной радиотехнической и радиотепловой защиты и противодействия средствам обнаружения и поражения высокоточным оружием 17.
После завершения обзора морской поверхности и передачи информации на приемные пункты функционирование аппаратуры обзора морской поверхности прекращается и ракета самоликвидируется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Наземный радиолокационный обнаружитель | 2017 |
|
RU2714450C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| Способ калибровки радиолокационной станции с активной фазированной антенной решёткой | 2018 |
|
RU2674432C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ КЛАССОВ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ ДЛЯ МНОГОДИАПАЗОННОГО РАЗНЕСЕННОГО РАДИОЛОКАЦИОННОГО КОМПЛЕКСА С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2020 |
|
RU2741057C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| Способ обзора воздушного пространства импульсно-доплеровской радиолокационной станцией с активной фазированной антенной решеткой | 2022 |
|
RU2794466C1 |
Изобретение относится к радиолокационным способам обнаружения и определения подвижных и неподвижных надводных объектов, их координат и параметров движения на дальностях прямой видимости до 800 км с использованием радиолокаторов на летательных аппаратах. Достигаемый технический результат – повышение дальности обнаружения радиолокационно-видимых на морской поверхности объектов, повышение точности определения их координат и параметров движения и передачи этих данных на приемные пункты. Указанный результат достигается путем перемещения луча антенны радиолокатора в азимутальной и угломестной плоскостях за счет того, что радиолокатор размещен на ракете вертикального старта и полета, вращающейся вокруг своей продольной оси, обеспечивая перемещение радиолокатора по вертикали относительно Земли вокруг оси перемещения ракеты, обеспечивая вращение луча антенны по спирали синхронно со скоростью вращения радиолокатора вокруг оси перемещения, при этом обеспечивается изменение сектора обзора в сторону большей дальности синхронно с высотой подъема радиолокатора, а устройство, реализующее способ, представляет собой радиолокатор, размещенный на ракете вертикального старта и полета с вращением вокруг своей продольной оси, при этом антенна радиолокатора выполнена в виде прямоугольного антенного полотна с электронным управлением луча АФАР, размещенного под радиопрозрачным обтекателем вдоль боковой поверхности ракеты, размеры которого в поперечной плоскости составляют не более 15 длин волн минимальной частоты рабочего диапазона радиолокатора, а в продольной плоскости ракеты не более 150 длин волн минимальной частоты рабочего диапазона радиолокатора, состоящего из отдельных размещенных по длине антенны приемо-передающих модулей, последовательно включаемых по длине антенны, по мере подъема ракеты. При этом радиолокатор выполнен с возможностью работы, как в обзорном режиме, так и в режиме с синтезированной апертурой антенны. 2 н. и 2 з.п. ф-лы, 1 ил.
1. Способ радиолокационного обзора морской поверхности, заключающийся в ее круговом обзоре за счет горизонтального перемещения луча антенны радиолокатора в азимутальной плоскости и вертикального перемещения луча этой антенны в угломестной плоскости, отличающийся тем, что радиолокатор размещен на ракете вертикального старта и полета, вращающейся вокруг своей продольной оси, при этом обеспечивается перемещение радиолокатора по вертикали относительно Земли вокруг оси перемещения ракеты и возможность обзора поверхности за счет вращения луча антенны в азимутальной плоскости с перемещением направления сектора обзора морской поверхности лучом антенны радиолокатора в вертикальной плоскости в сторону большей дальности обзора в интервале от не менее 40 км до 800 км синхронно с вертикальным перемещением радиолокатора, что обеспечивает перемещение сектора обзора лучом антенны радиолокатора морской поверхности по спирали с перекрытием соседних участков наблюдения до 70% и в горизонтальной плоскости синхронно со скоростью вращения радиолокатора вокруг оси перемещения в вертикальном направлении, а принятая информация о его текущих координатах и обнаруженных объектах передается на приемные пункты.
2. Устройство радиолокационного обзора морской поверхности, содержащее радиолокатор, антенна которого выполнена с возможностью ее кругового обзора за счет горизонтального перемещения луча антенны радиолокатора в азимутальной плоскости и вертикального перемещения луча этой антенны в угломестной плоскости, отличающееся тем, что радиолокатор размещен на ракете вертикального старта и полета с вращением вокруг своей продольной оси, при этом антенна радиолокатора выполнена в виде прямоугольного антенного полотна с электронным управлением направления луча активной фазированной антенной решетки (АФАР), размещенного под радиопрозрачным обтекателем вдоль боковой поверхности ракеты, размеры которой в поперечной плоскости составляют не более 15 длин волн минимальной частоты рабочего диапазона радиолокатора, а в продольной плоскости ракеты не более 150 длин волн минимальной частоты рабочего диапазона радиолокатора, состоящего из отдельных размещенных по длине антенны приемо-передающих модулей, последовательно включаемых по длине антенны по мере подъема ракеты, а в состав радиолокатора введены блоки синхронизации управления положением луча с учетом движения ракеты по вертикали, колебаний ракеты в процессе полета, а также скорости ее вращения вокруг продольной оси по сигналам от бортовой системы управления ракеты, при этом радиолокатор выполнен с возможностью работы как в обзорном режиме, так и в режиме с синтезированной апертурой антенны, а на борту ракеты установлена аппаратура передачи информации с радиолокатора на приемные пункты.
3. Устройство по п. 2, отличающееся тем, что на ракете установлена аппаратура и средства активной радиотехнической и радиотепловой защиты и противодействия средствам обнаружения и поражения высокоточным оружием.
4. Устройство по пп. 2, 3, отличающееся тем, что на ракете установлена аппаратура и средства самоликвидации ракеты по завершении обзора морской поверхности и передачи этой информации на приемные пункты.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Нижний Новгород, 2005, с.168-172 | |||
| СПОСОБ ОБНАРУЖЕНИЯ НАЗЕМНЫХ И МОРСКИХ ЦЕЛЕЙ БОРТОВЫМ РАДИОЛОКАТОРОМ ЛЕТАТЕЛЬНОГО АППАРАТА С ЖЕСТКО ЗАКРЕПЛЕННОЙ ФЮЗЕЛЯЖНОЙ АНТЕННОЙ БОКОВОГО ОБЗОРА | 2011 |
|
RU2466421C1 |
| Транспортное устройство автоматической поточной линии | 1960 |
|
SU135816A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| WO 2011001141 A1, 06.01.2011 | |||
| WO 2004006119 A2, 15.01,2004 | |||
| US 5568450 A, 22.10.1996. | |||

