ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к медицинскому устройству для использования в сосуде пациента в целях диагностики или лечения, в частности картирование ткани и/или абляция ткани при помощи радиочастотного (РЧ) или других источников энергии. Более конкретно, изобретение относится к катетеру со множеством несущих, причем каждая из них удерживает по меньшей мере один электрод.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Электродные катетеры широко применяются в медицинской практике в течение многих лет. Они используются для стимуляции и картирования электрической активности сердца и для абляции участков нарушенной электрической активности. В процессе применения электродный катетер вводится в полость сердца. После установки катетера определяется местоположение очага патологической электрической активности в ткани сердца.
Одна из техник определения местонахождения включает процедуру электрофизиологического картирования, в которой исходящие от тканей проводящей системы сердца электрические сигналы систематически регистрируются, и на основе этих сигналов составляется карта. Анализирую карту, врач может выявить патологический проводящий путь. Общепринятым методом картирования электрических сигналов от тканей проводящей системы сердца является чрескожное введение электрофизиологического (электродного) катетера, на дистальном конце которого установлены электроды для картирования. Катетер перемещают с целью поместить эти электроды на эндокард или как можно ближе к нему. Отслеживая электрические сигналы с эндокарда, можно точно определить местоположение участков патологической проводимости, ответственных за возникновение аритмии.
Как только в тканях выявляется аритмогенная точка, врач использует процедуру абляции, разрушая аритмогенную ткань в попытке устранить нарушения электрического сигнала, восстановить нормальный ритм сердца или хотя бы добиться частичной нормализации сердечного ритма. Успешная абляция тканей проводящей системы сердца в аритмогенной зоне обычно устраняет аритмию или хотя бы доводит сердечный ритм до приемлемого уровня.
Типичная процедура абляции включает подсоединение отводящего электрода, закрепленного на коже пациента пластырем. Радиочастотный (РЧ) ток подается к одному или более электроду на верхушке катетера и проходит через окружающую среду, а именно через кровь и ткань, по направлению к контрольному электроду. В качестве альтернативы катетер может содержать биполярные электроды, в случае которых, например, ток течет от одного точечного электрода через среду к другому электроду, который удерживается на верхушке катетера. В любом случае распределение тока зависит от площади поверхности электрода, находящейся в контакте с тканями и кровью, чья проводимость выше, чем у тканей. Воздействие тока - причина нагрева тканей. Происходит нагревание ткани, достаточное для повреждения клеток в сердечной или сосудистой ткани, что приводит к образованию очага поражения, который не проводит электрический ток.
Известны катетеры со множеством несущих (обычно называемые катетерами системы Malecot). Поскольку каждая несущая содержит по меньшей мере один электрод, для ускорения картирования и абляции возможен одновременный контакт со множеством областей в участке целевой ткани, в особенности в трубчатом участке, где необходимы очаги поражения, или «разрывы электрической цепи», вдоль внутренней окружности трубчатого участка для устранения волн малой амплитуды, возникающих в трубчатом участке или сосуде. За счет расположенных радиально несущих одинаковой длины быстро достигается контакт с тканью вдоль внутренней окружности трубчатого участка или вены. Большая продолжительность контакта с внутренней окружностью легко достигается вращением катетера. Тем не менее, было обнаружено, что абляция вдоль внутренней окружности или узкой полосы внутри вены может привести к ее стенозу, включая сужение, уплотнение или укрепление вены.
Более того, анатомия сосудов подразумевает наличие сосудов всех размеров и форм. Диаметры сосудов могут сильно варьироваться, иногда встречаются сосуды аномальной формы. В этих случаях катетер типа Malecot, который позволяет регулировать расположение и размещение несущих, может значительно уменьшить время, необходимое для проведения картирования и/или абляции.
Поэтому существует потребность в катетере, приспособленном для картирования и абляции в трубчатой структуре, который может производить картирование или абляцию в трубчатом участке, тем самым уменьшая нежелательное повреждение трубчатой структуры. Существует еще одна потребность в таком катетере типа Malecot для абляции, который бы обеспечивал одновременный контакт с тканью с формированием разрыва электрической цепи без образования стеноза и с возможностью регулирования расположения и/или размещения направляющих.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к усовершенствованным катетерам для картирования и/или абляции трубчатых участков сердечнососудистой системы. Катетер содержит удлиненный корпус катетера и дистальный сегмент, состоящий по меньшей мере из двух несущих, а также узел монтажа с несущими, каждая из которых имеет проксимальный конец, соединенный с узлом монтажа, и свободный дистальный конец. Узел монтажа соосен с продольной осью катетера, и каждая несущая отходит радиально кнаружи от продольной оси катетера. В развернутом состоянии несущие могут принимать множество форм. Одна форма подразумевает, что каждая несущая принимает изогнутую вовнутрь форму таким образом, чтобы каждая несущая контактировала с внутренней поверхностью ткани стенки сосуда проксимальнее дистального конца каждой несущей. Другая форма подразумевает, что каждая несущая принимает изогнутую кнаружи форму таким образом, чтобы каждая несущая контактировала с внутренней поверхностью ткани стенки сосуда у дистального конца каждой несущей. Еще одна форма подразумевает наличие линейных несущих таким образом, чтобы каждая несущая контактировала со внутренней поверхностью ткани стенки сосуда у дистального конца каждой несущей.
Длина несущих варьируется таким образом, чтобы дистальные концы несущих определяли контуры различных окружностей вдоль внутренней стенки сосуда. В одном варианте осуществления длина каждой следующей несущей увеличивается по кругу относительно продольной оси катетера (по часовой стрелке или против нее) между «начальной» несущей и «концевой» несущей таким образом, чтобы дистальные концы несущих выстраивались в спиральный рисунок от дистального конца «начальной» несущей, обозначающей 0 градусов, до дистального конца "концевой" несущей, обозначающей по меньшей мере около 180 градусов или, что предпочтительнее, по меньшей мере около 360 градусов.
Катетер настоящего изобретения может включать плунжер, приспособленный для телескопического движения относительно дистального сегмента вдоль продольной оси катетера. Плунжер имеет скошенную боковую сторону с криволинейной поверхностью для смещения несущих, когда плунжер приведен в действие оператором для совершения телескопического движения относительно дистального сегмента.
Катетер настоящего изобретения может также содержать второй дистальный сегмент, который расположен дистальнее первого дистального сегмента. Второй дистальный сегмент может быть расположен относительно первого дистального сегмента таким образом, чтобы дистальные концы несущих двух сегментов выстраивались в спиральный рисунок, в котором дистальные концы несущих первого сегмента образуют проксимальную часть спирального рисунка, а дистальные концы несущих второго сегмента образуют дистальную часть спирального рисунка. Например, проксимальная часть может приблизительно составлять от 0 до 360 градусов спирального рисунка, а дистальная часть может приблизительно составлять от 360 до 720 градусов спирального рисунка. В соответствии с особенностью изобретения спиральный рисунок минимизирует риск стенозирования трубчатого участка.
В одном варианте осуществления настоящего изобретения пространственное соотношение первого и второго дистальных сегментов фиксировано таким образом, чтобы пространственный разнос и/или фиксированное осевое и угловое соотношение дистальных сегментов друг к другу было постоянным. В другом варианте осуществления пространственное соотношение регулируется при помощи телескопической проксимальной части, которая отходит от второго дистального сегмента и удерживается с возможностью перемещения в узле монтажа первого дистального сегмента. К телескопической проксимальной части прикреплена вытяжная проволока, и движение вытяжной проволоки регулируется оператором при помощи рукоятки управления.
В одном варианте осуществления катетер содержит корпус катетера, дистальный сегмент по меньшей мере с двумя несущими различной длины и рукоятку управления. Каждая несущая имеет поддерживающий рычаг с памятью формы, непроводящую оболочку и по меньшей мере один электрод. Дистальный сегмент может перемещаться между развернутым состоянием, в котором каждая несущая радиально отходит от корпуса катетера кнаружи, и свернутым состоянием, в котором каждая несущая, как правило, располагается вдоль продольной оси корпуса катетера. В одном более подробном варианте осуществления в развернутом состоянии несущие принимают изогнутую форму. В качестве альтернативы каждая несущая может образовывать по существу прямую линию.
ОПИСАНИЕ ФИГУР
Эти и другие особенности и преимущества настоящего изобретения будут более понятны на примере следующего подробного описания в сочетании с сопроводительными рисунками.
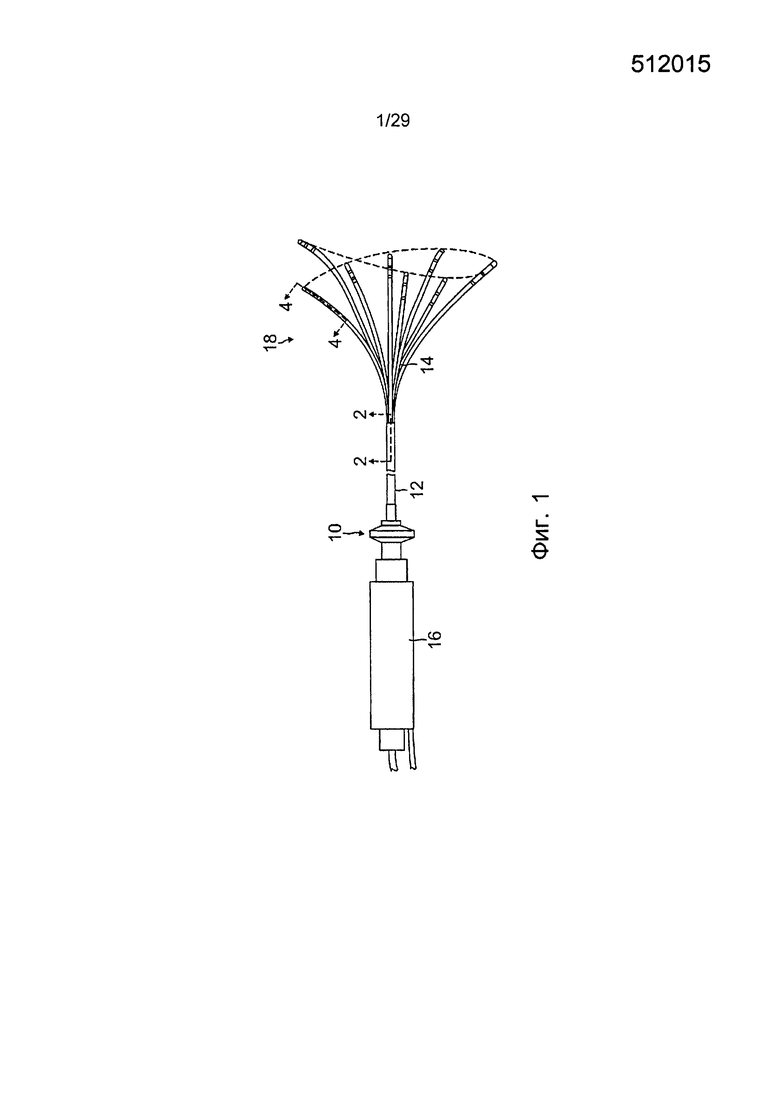
Фиг.1 является видом катетера сверху и сбоку в соответствии с вариантом осуществления настоящего изобретения.
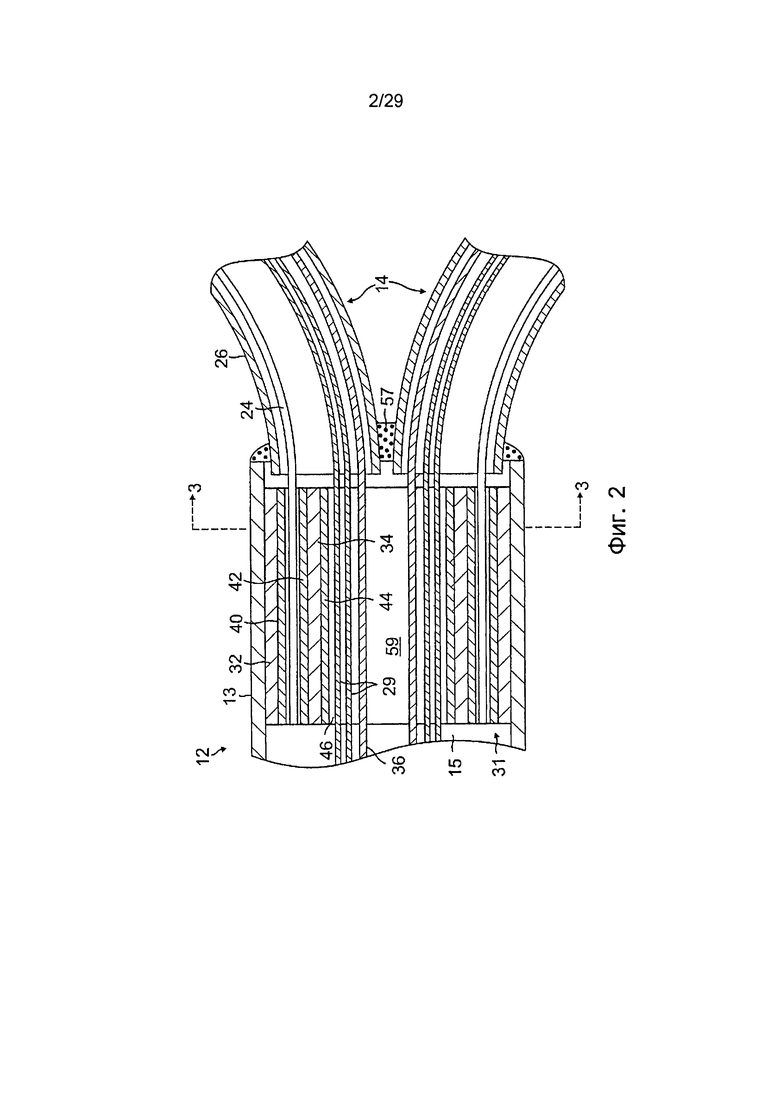
Фиг.2 является видом сбоку в поперечном разрезе узла монтажа дистального сегмента в соответствии с вариантом осуществления настоящего изобретения.
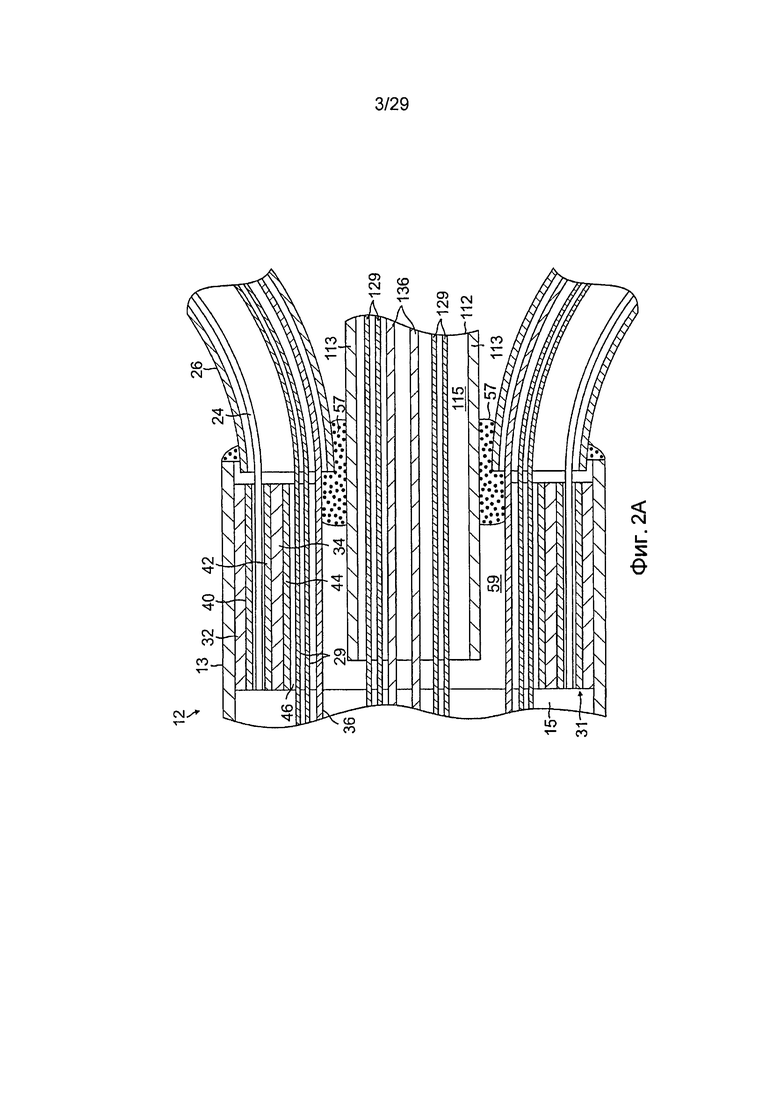
Фиг.2A является видом сбоку в поперечном разрезе соединения между первым дистальным сегментом и проксимальным концом второго дистального сегмента в соответствии с вариантом осуществления настоящего изобретения.
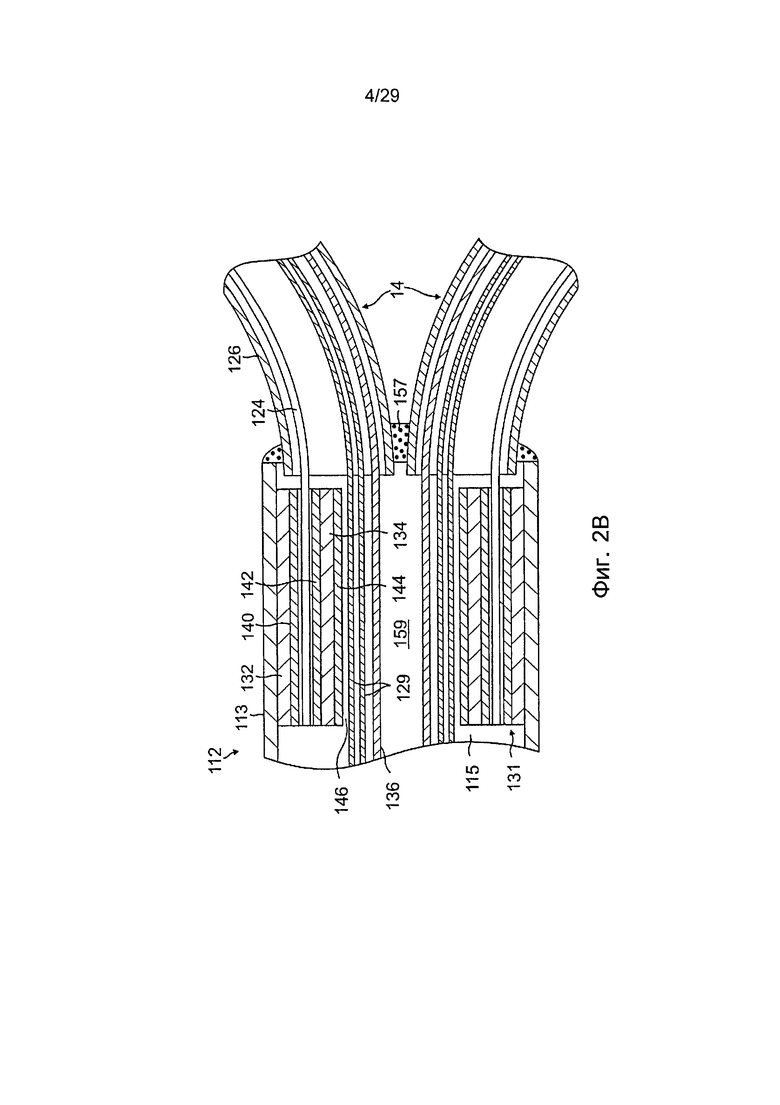
Фиг.2B является видом сбоку в поперечном разрезе второго дистального сегмента, который подходит для использования с первым дистальным сегментом с Фиг.2A, в соответствии с вариантом осуществления настоящего изобретения.
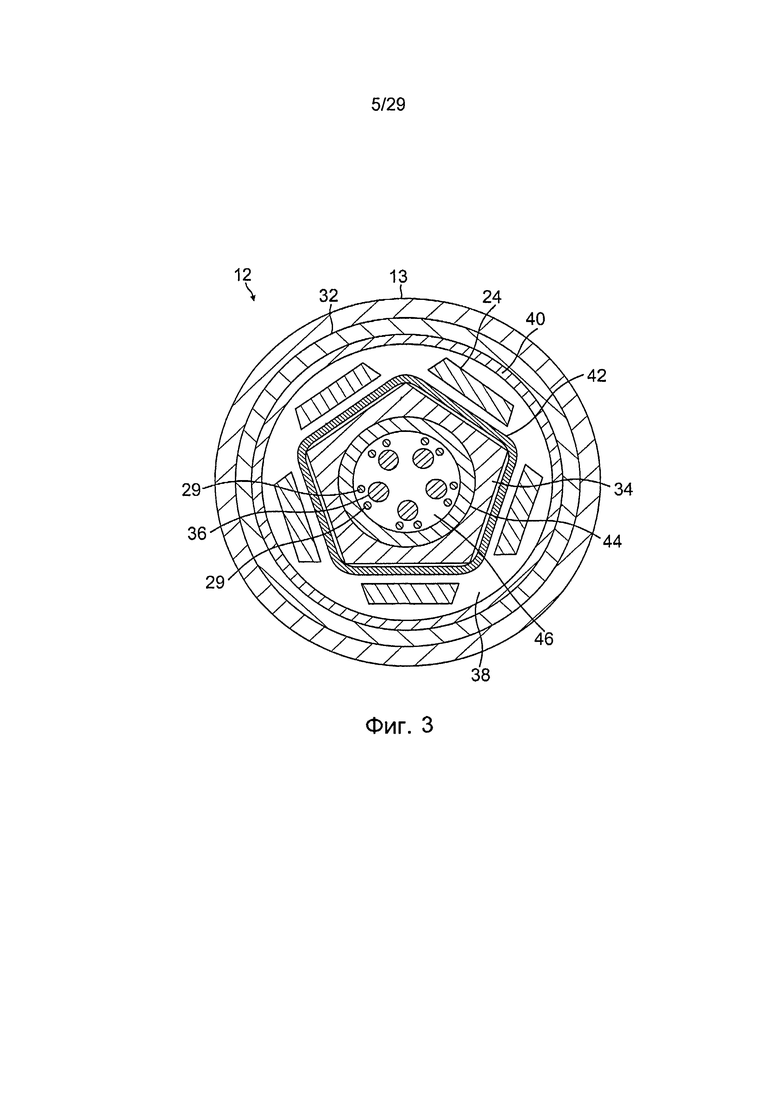
Фиг.3 является видом сзади в поперечном разрезе узла монтажа с Фиг.2, изображенном вдоль линии 3-3.
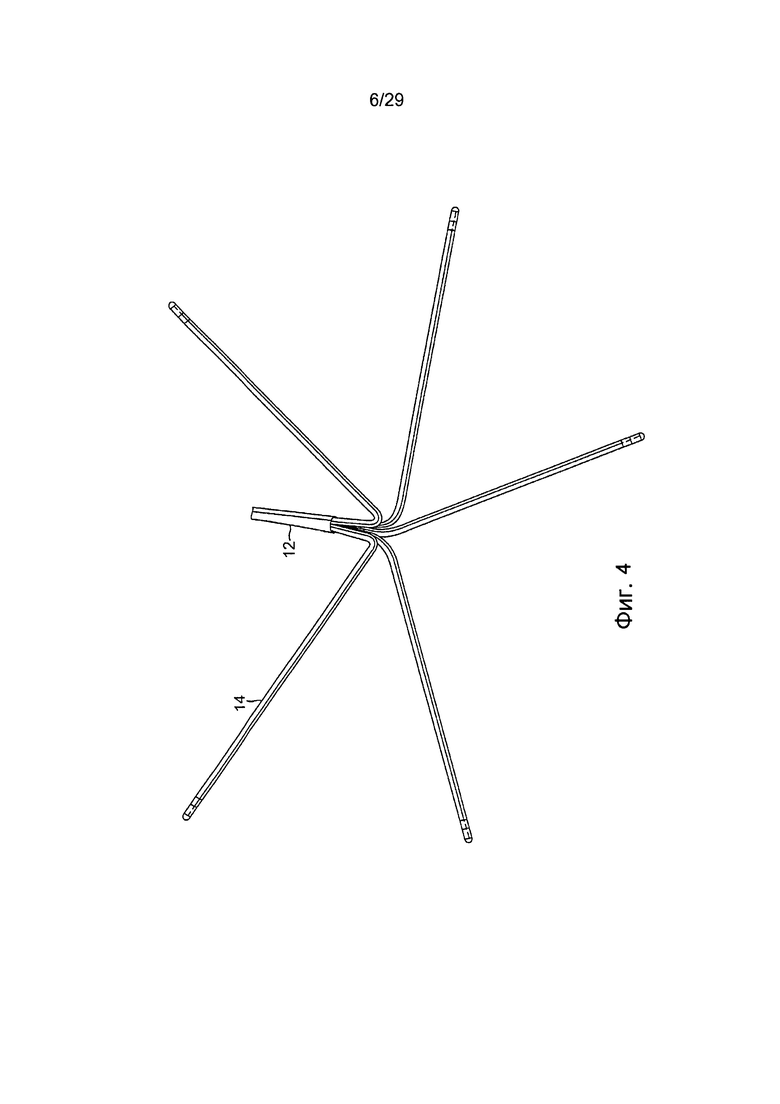
Фиг.4 является дистальным сегментом в соответствии с альтернативным вариантом осуществления настоящего изобретения.
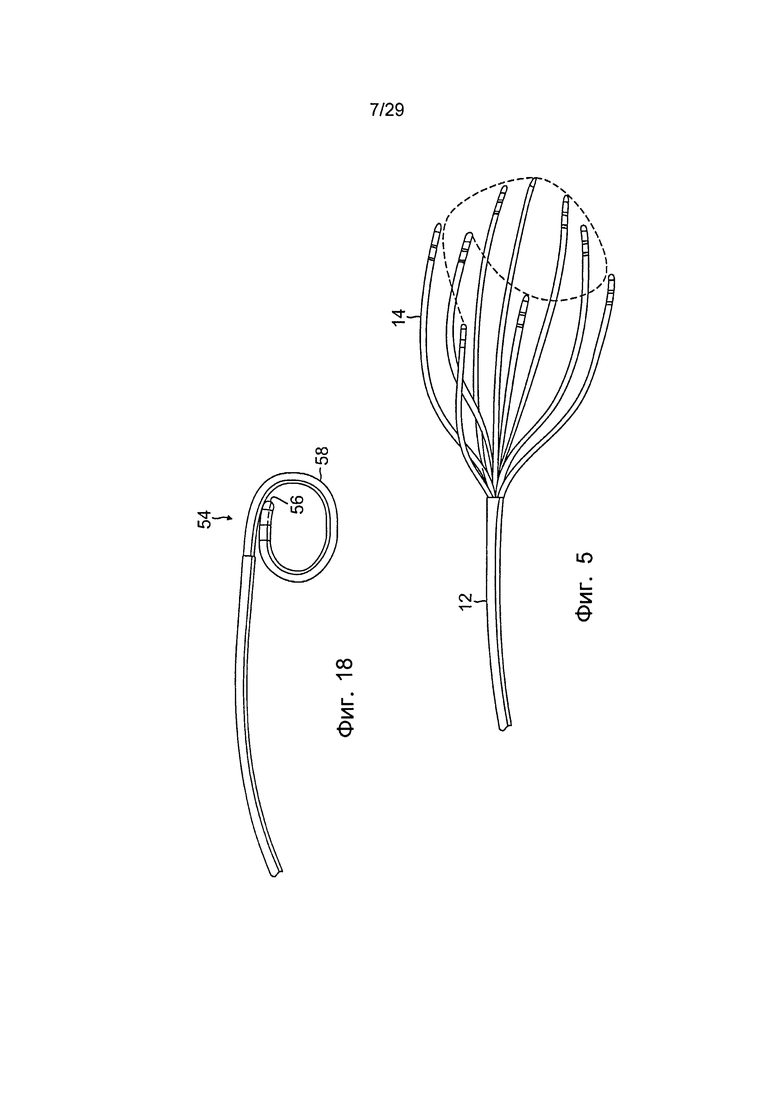
Фиг.5 является дистальным сегментом в соответствии с другим альтернативным вариантом осуществления настоящего изобретения.
Фиг.6A является видом дистального сегмента сзади в соответствии с вариантом осуществления настоящего изобретения.
Фиг.6B является видом дистального сегмента сбоку и сверху в соответствии с вариантом осуществления настоящего изобретения.
Фиг.6C является видом дистального сегмента сбоку и сверху в соответствии с другим вариантом осуществления настоящего изобретения.
Фиг.6D является видом сбоку и сверху дистального сегмента, находящегося в трубчатом участке сердечнососудистой системы, в соответствии с вариантом осуществления настоящего изобретения.
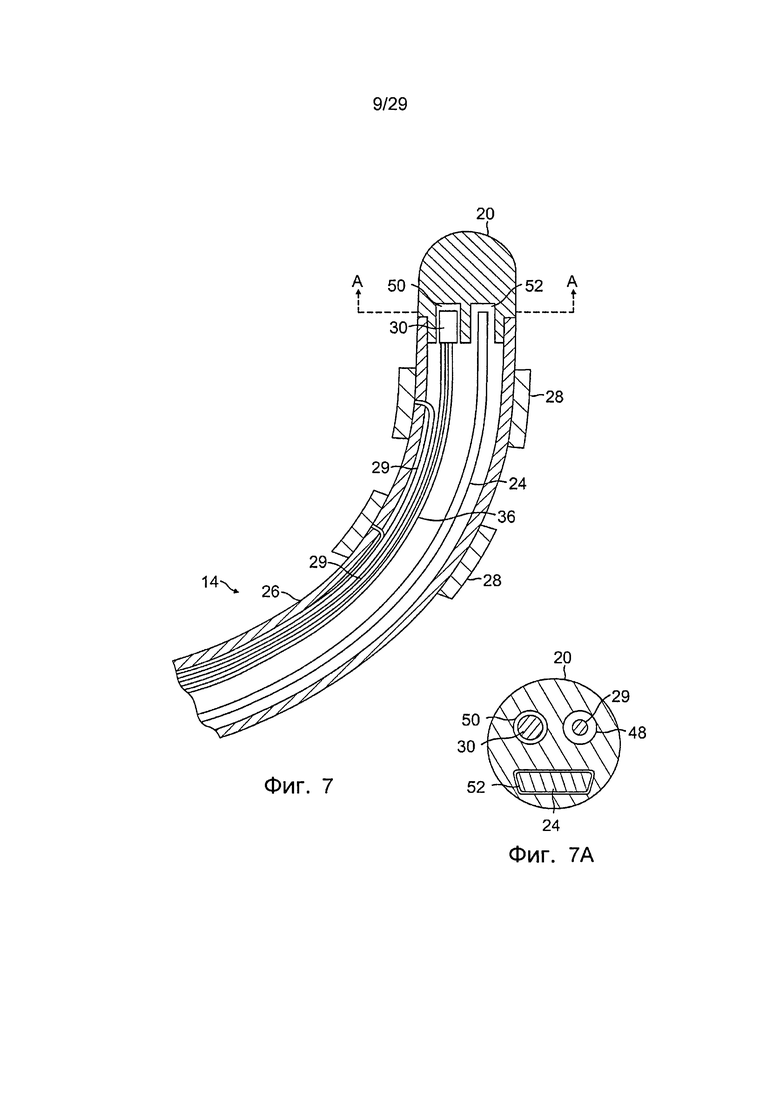
Фиг.7 является видом несущей сбоку в поперечном разрезе в соответствии с вариантом осуществления настоящего изобретения.
Фиг.7A является видом сзади в поперечном разрезе дистального конца несущей с Фиг.7, изображенном вдоль линии A-A.
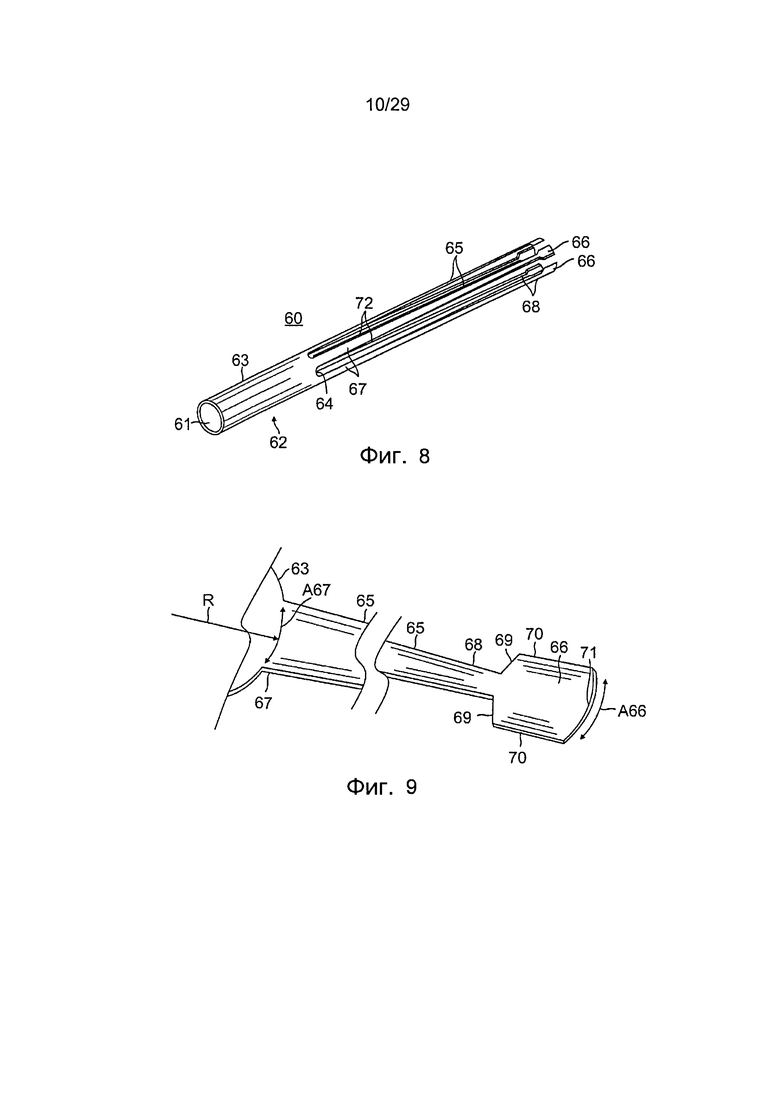
Фиг.8 является видом в перспективе цельного поддерживающего элемента в соответствии с вариантом осуществления настоящего изобретения.
Фиг.9 является видом в перспективе штока цельного поддерживающего элемента с Фиг.8.
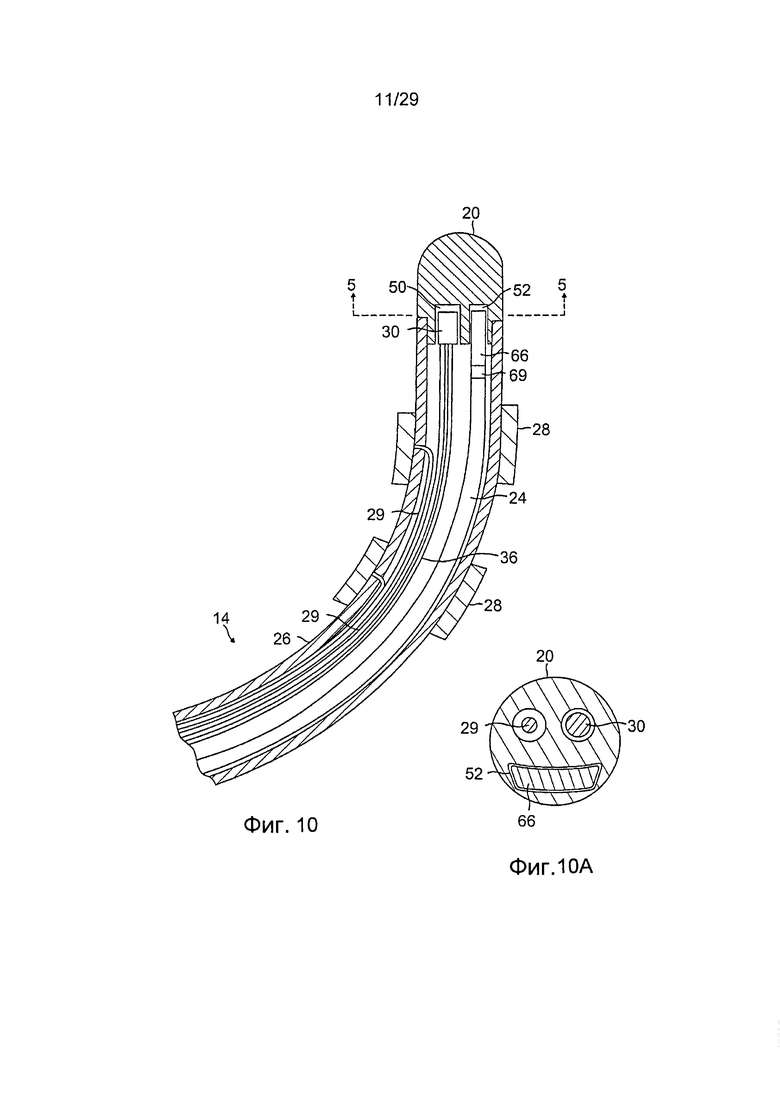
Фиг.10 является видом сбоку в поперечном разрезе несущей дистального сегмента, в котором используется цельный поддерживающий элемент, в соответствии с вариантом осуществления настоящего изобретения.
Фиг.10A является видом сзади в поперечном разрезе дистального конца несущей с Фиг.10, изображенном вдоль линии A-A.
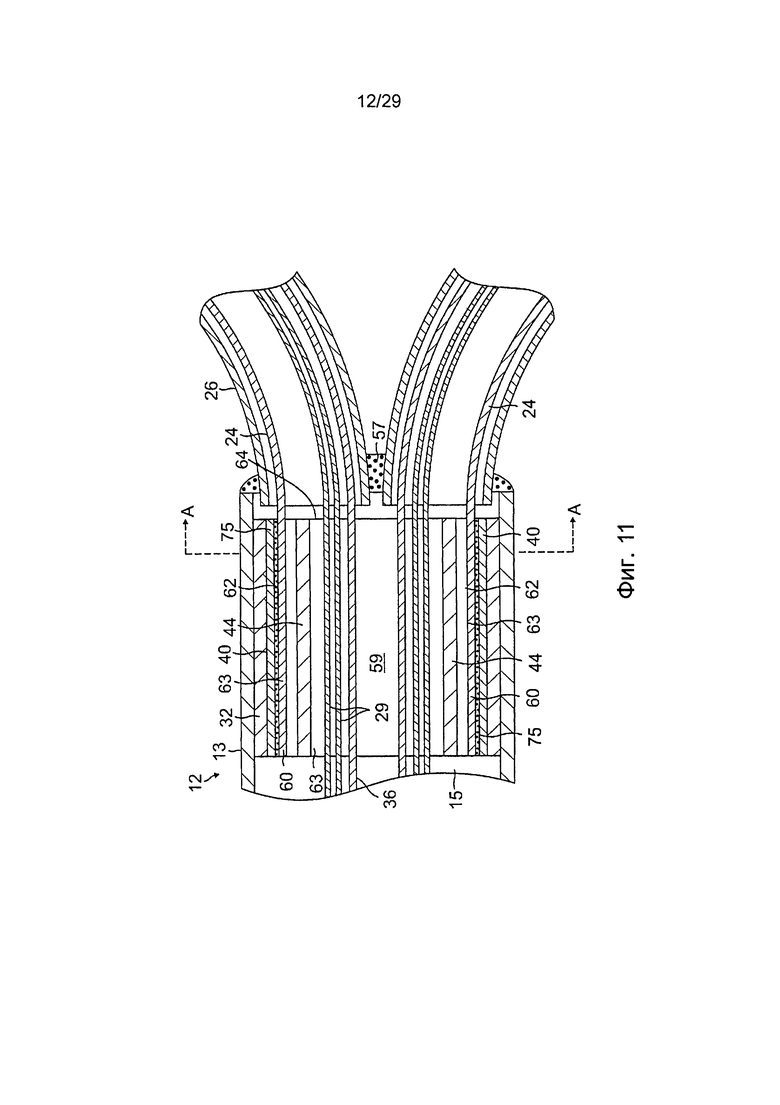
Фиг.11 является видом сбоку в поперечном разрезе узла монтажа, в которой используется цельный поддерживающий элемент, в соответствии с вариантом осуществления настоящего изобретения.
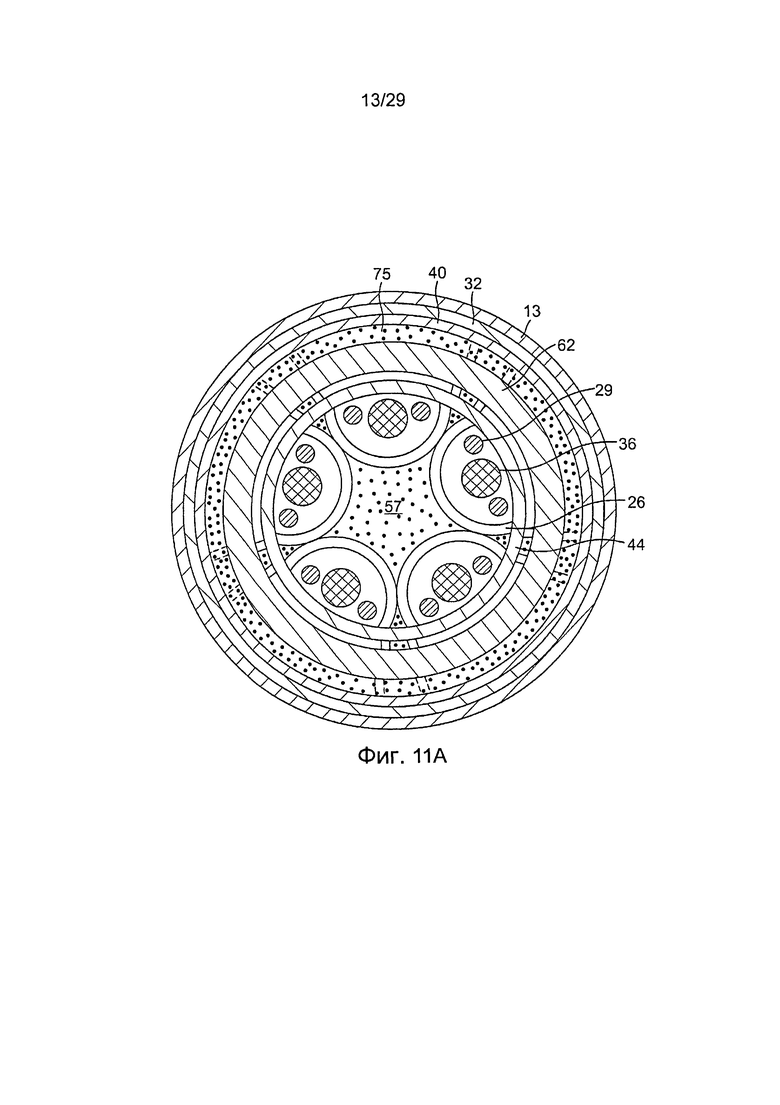
Фиг.11A является видом сзади в поперечном разрезе узла монтажа с Фиг.11, изображенном вдоль линии A-A.
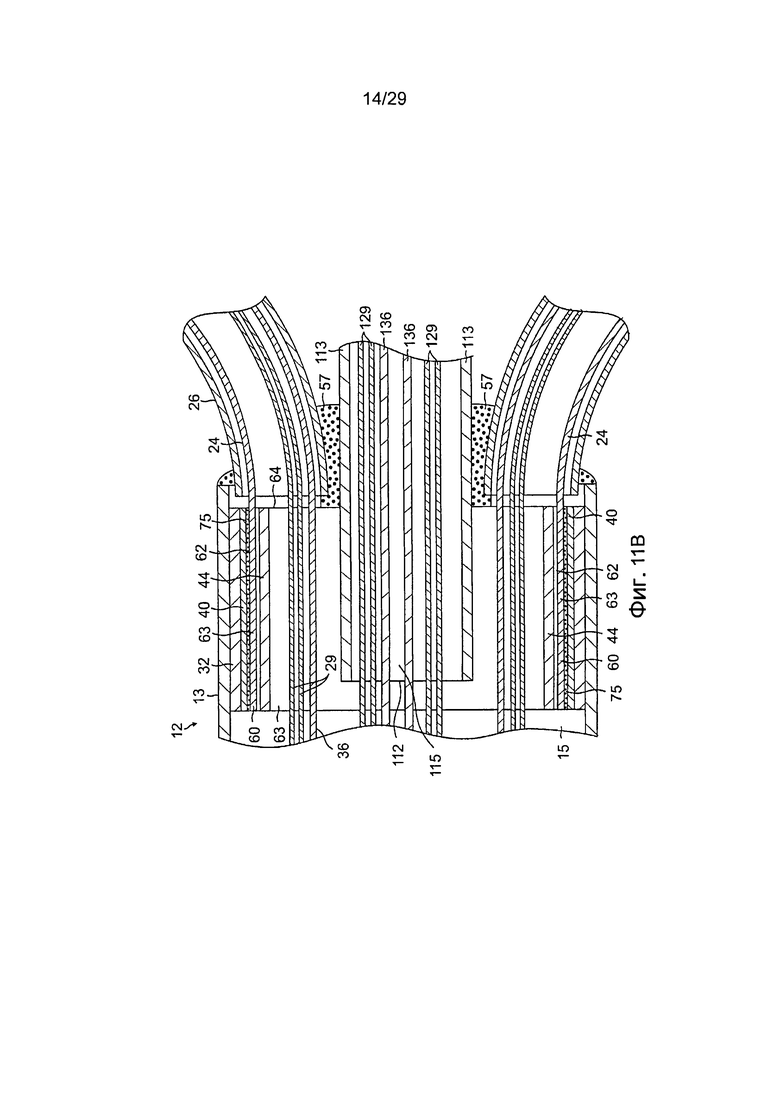
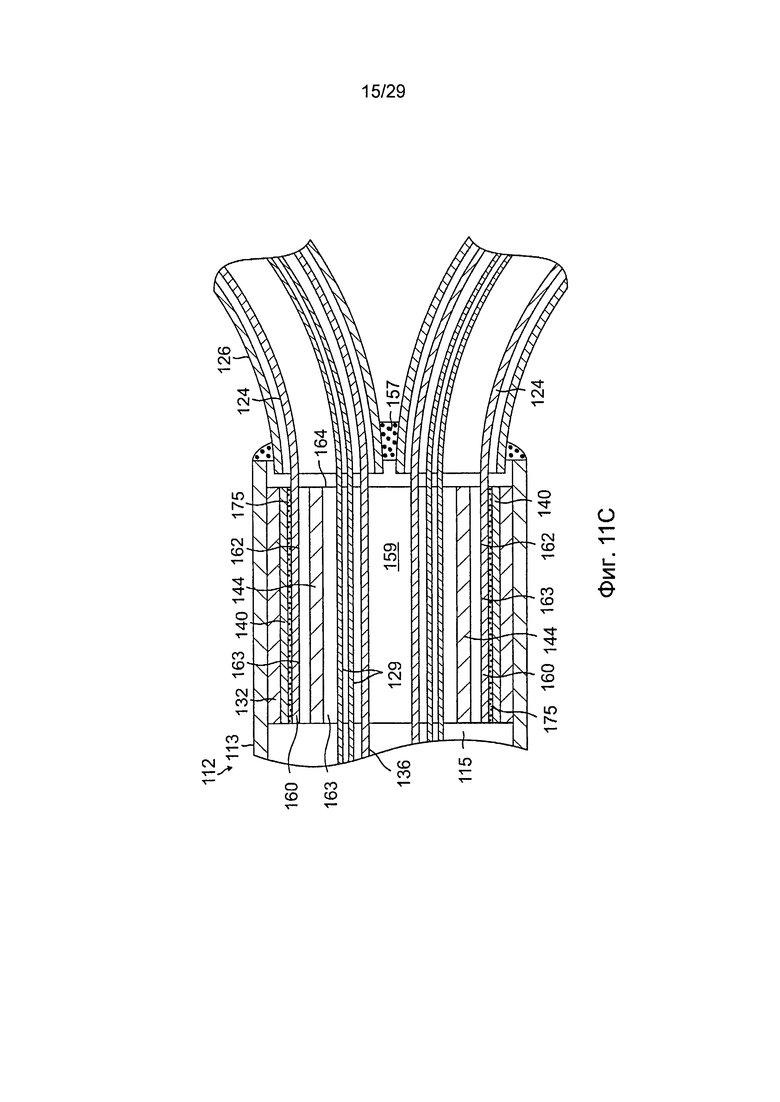
Фиг.11B является видом сбоку в поперечном разрезе соединения между первым дистальным сегментом и проксимальным концом второго дистального сегмента в соответствии с другим вариантом осуществления настоящего изобретения.
Фиг.11C является видом сбоку в поперечном разрезе второго дистального сегмента, подходящего для использования с первым дистальным сегментом с Фиг.11B, в соответствии с вариантом осуществления настоящего изобретения.
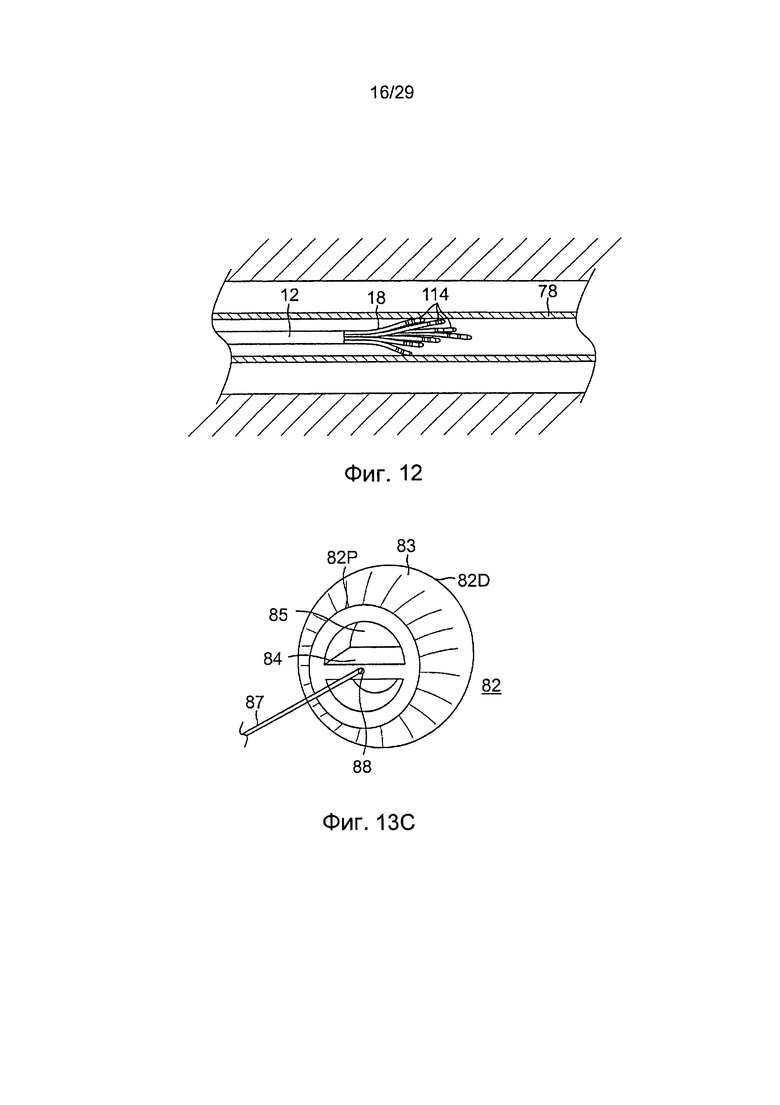
Фиг.12 является видом сбоку катетера настоящего изобретения, находящегося в направляющей оболочке, в соответствии с вариантом осуществления настоящего изобретения.
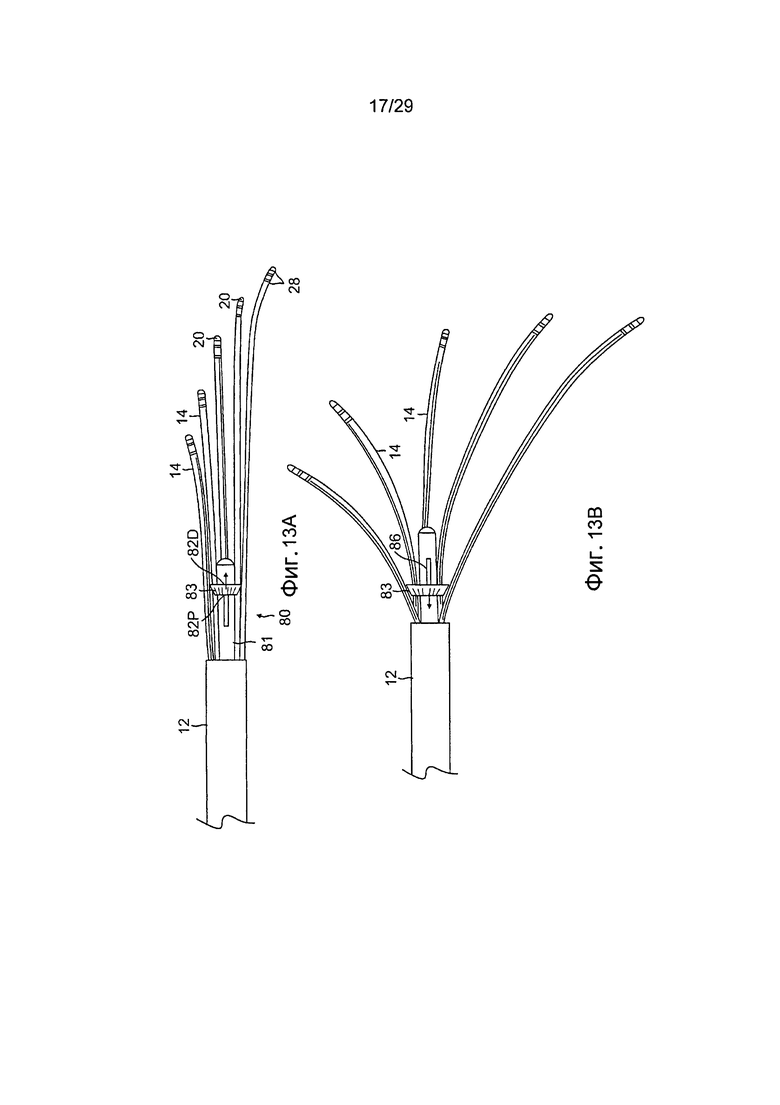
Фиг.13A является видом сбоку дистального сегмента со смещающим плунжером в соответствии с вариантом осуществления настоящего изобретения.
Фиг.13B является видом сбоку дистального сегмента с Фиг.13A со смещающим плунжером, который смещает несущие дистального сегмента.
Фиг.13C является видом в перспективе головки плунжера в соответствии с вариантом осуществления настоящего изобретения.
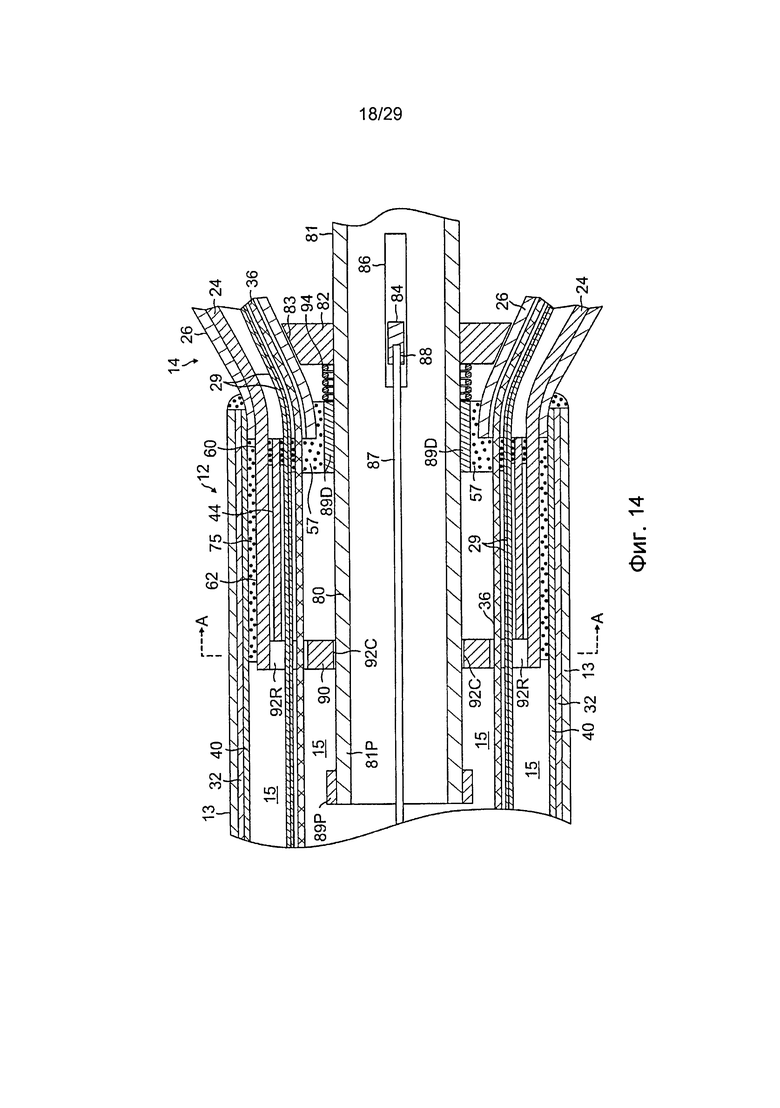
Фиг.14 является видом сбоку в поперечном разрезе дистального сегмента с Фиг.13B.
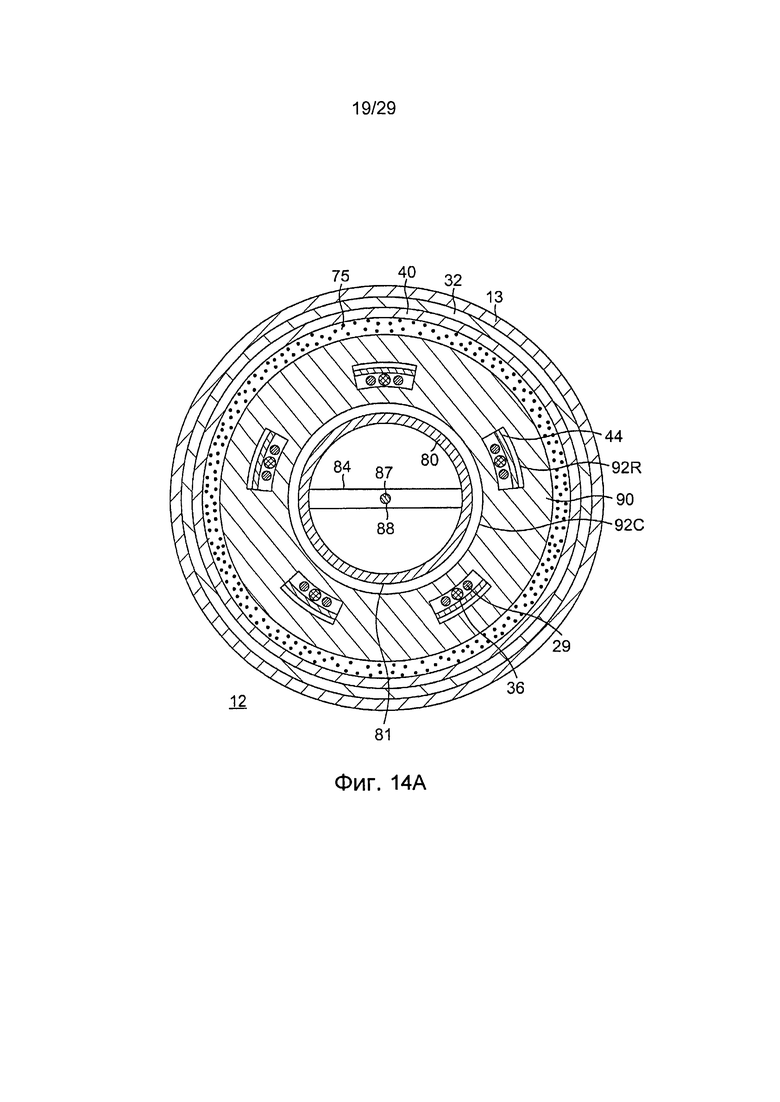
Фиг.14A является видом сзади в поперечном разрезе дистального сегмента с Фиг.14, изображенным вдоль линии A-A.
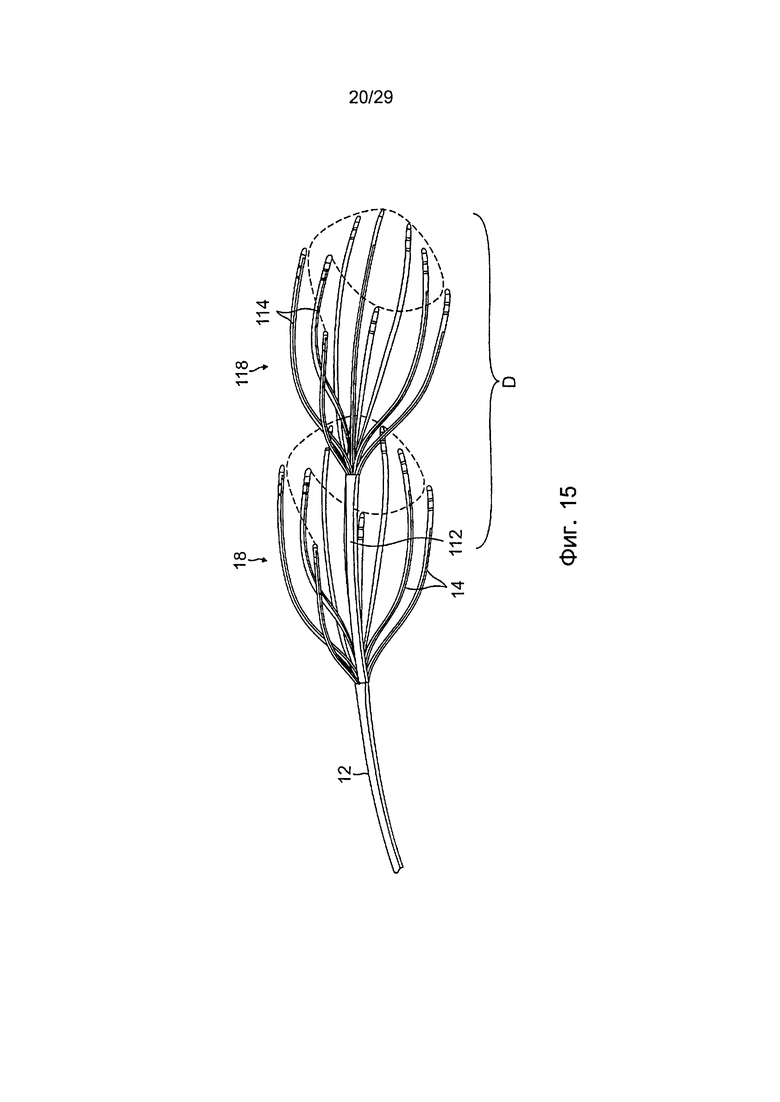
Фиг.15 является видом сбоку катетера с двумя дистальными сегментами в соответствии с вариантом осуществления настоящего изобретения.
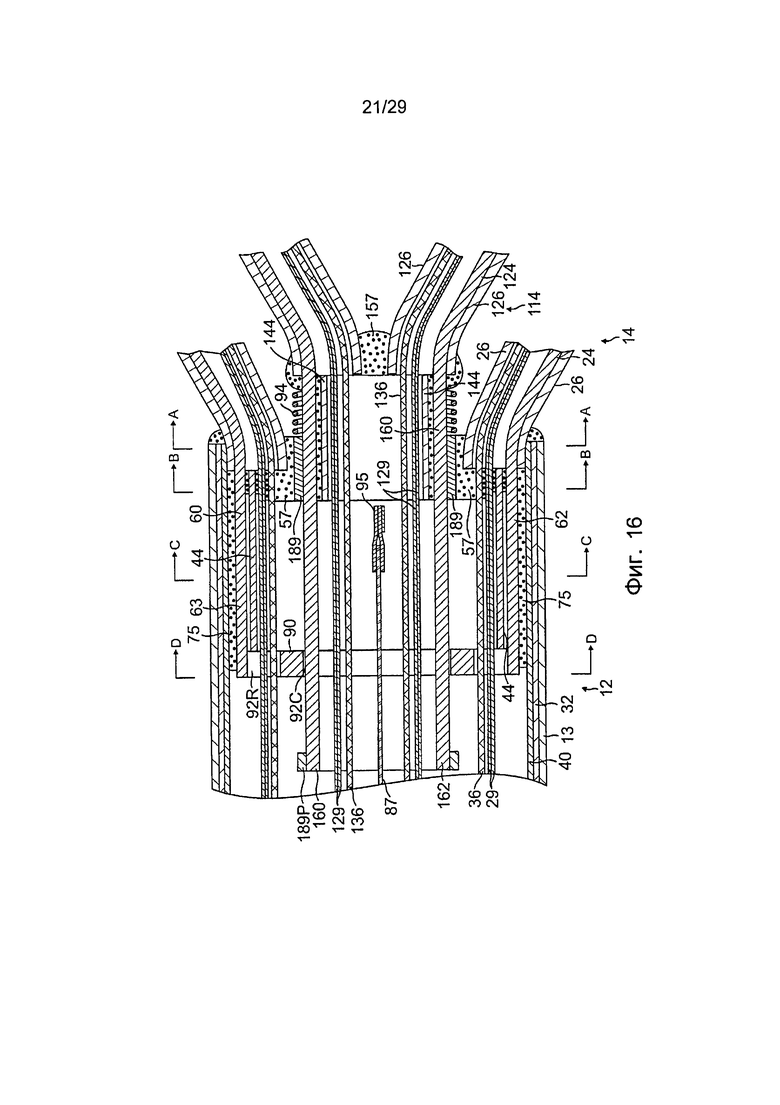
Фиг.16 является видом сбоку в поперечном разрезе соединения между первым дистальным сегментом и проксимальным концом телескопического второго дистального сегмента в соответствии с вариантом осуществления настоящего изобретения.
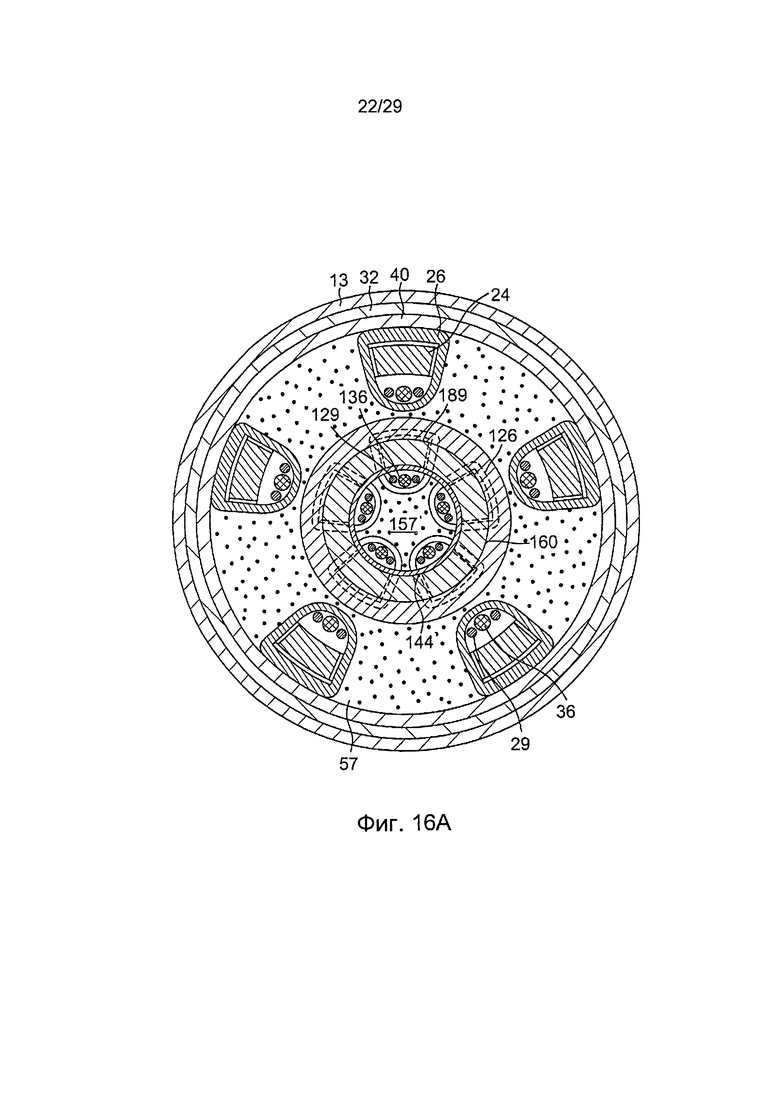
Фиг.16A является видом сзади в поперечном разрезе соединения с Фиг.16, изображенным вдоль линии A-A.
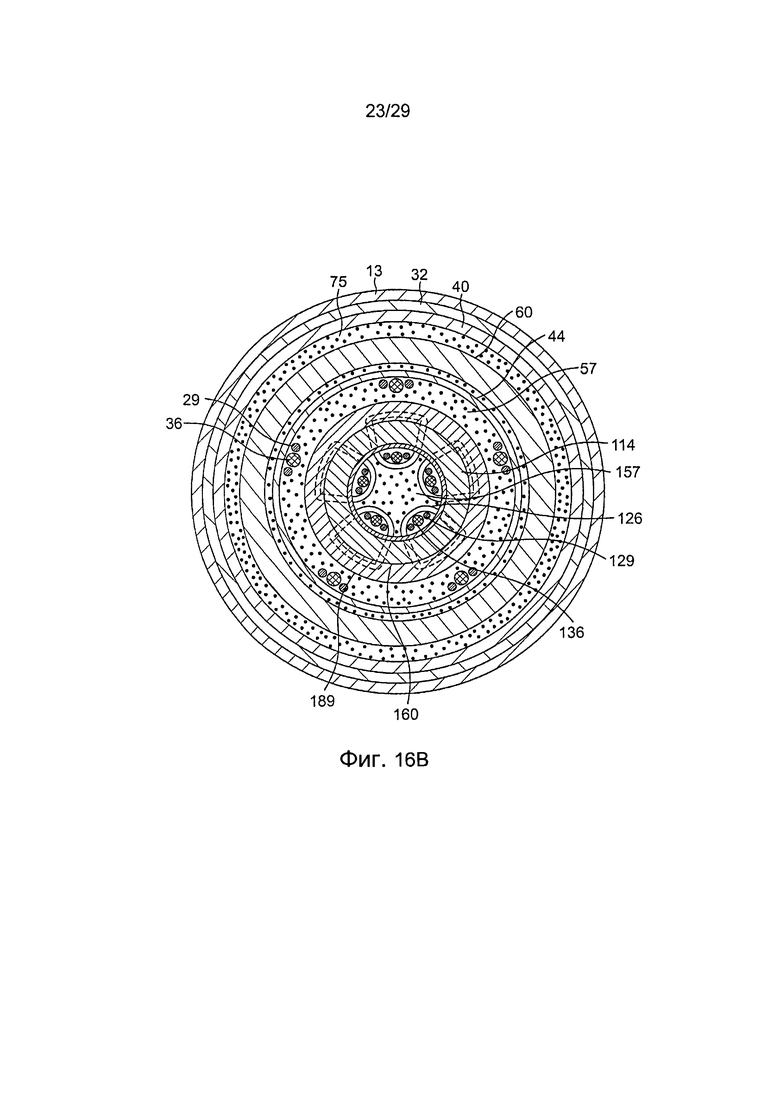
Фиг.16B является видом сзади в поперечном разрезе соединения с Фиг.16, изображенным вдоль линии B-B.
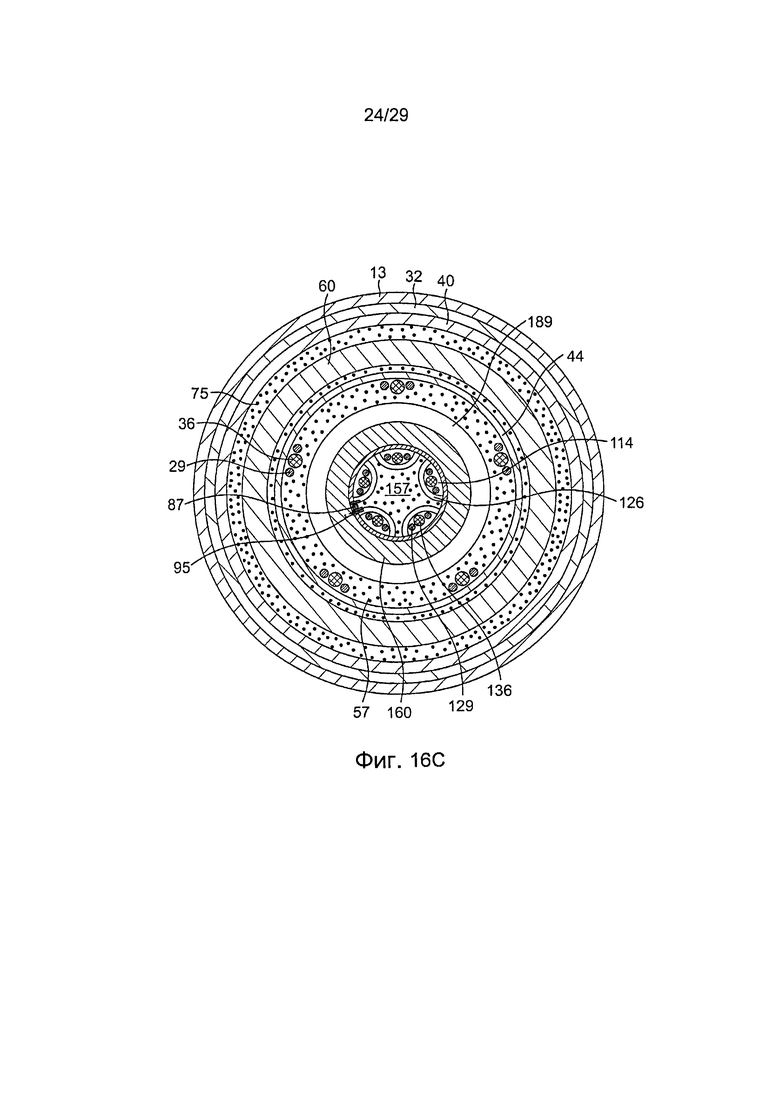
Фиг.16C является видом сзади в поперечном разрезе соединения с Фиг.16, изображенным вдоль линии C-C.
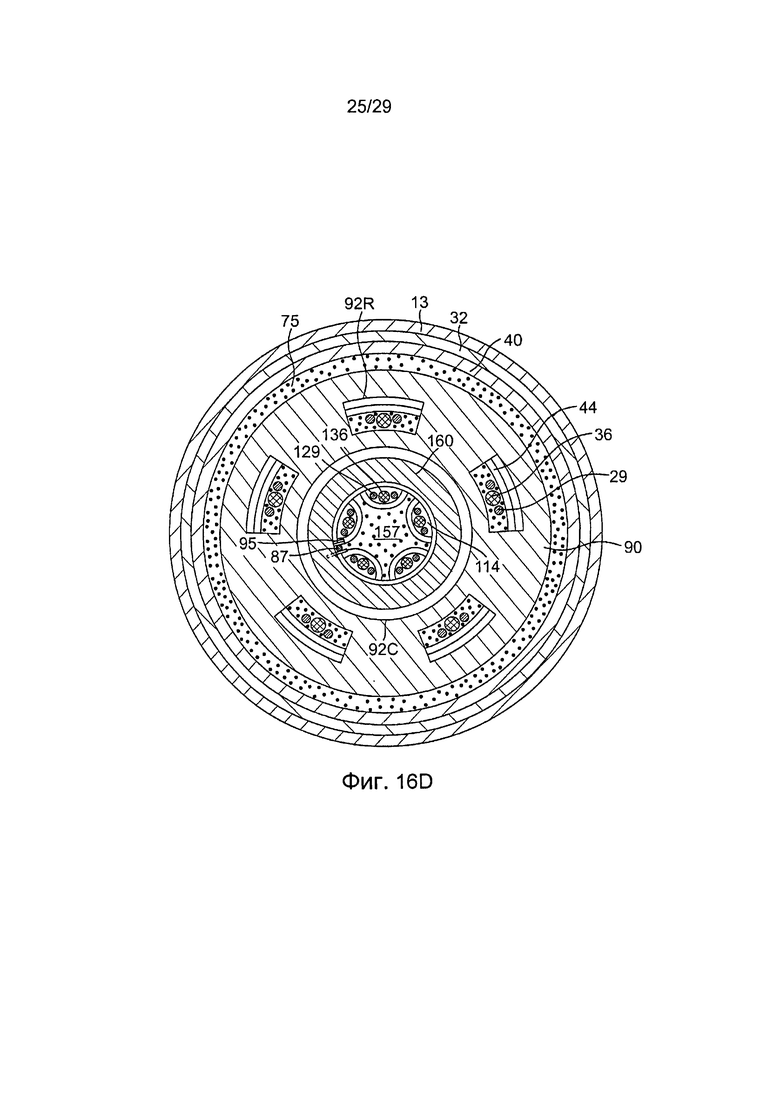
Фиг.16D является видом сзади в поперечном разрезе соединения с Фиг.16, изображенным вдоль линии D-D.
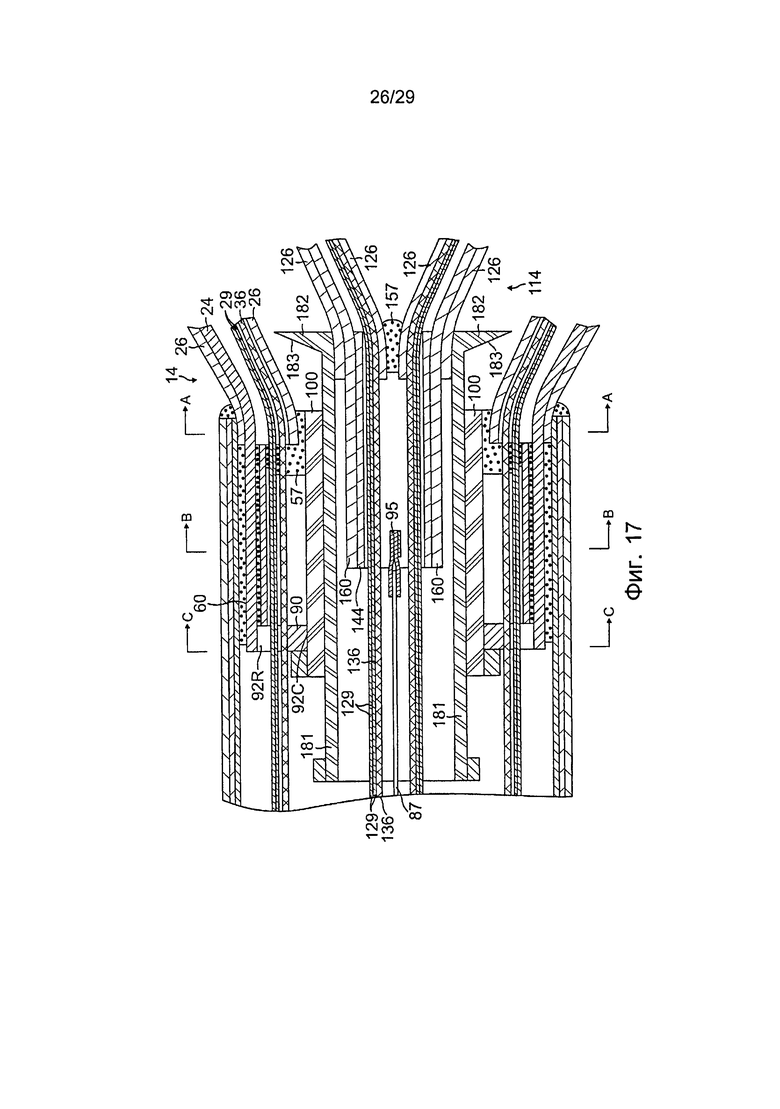
Фиг.17 является видом сбоку в поперечном разрезе соединения между первым дистальным сегментом и проксимальным концом телескопического второго дистального сегмента в соответствии с другим вариантом осуществления настоящего изобретения.
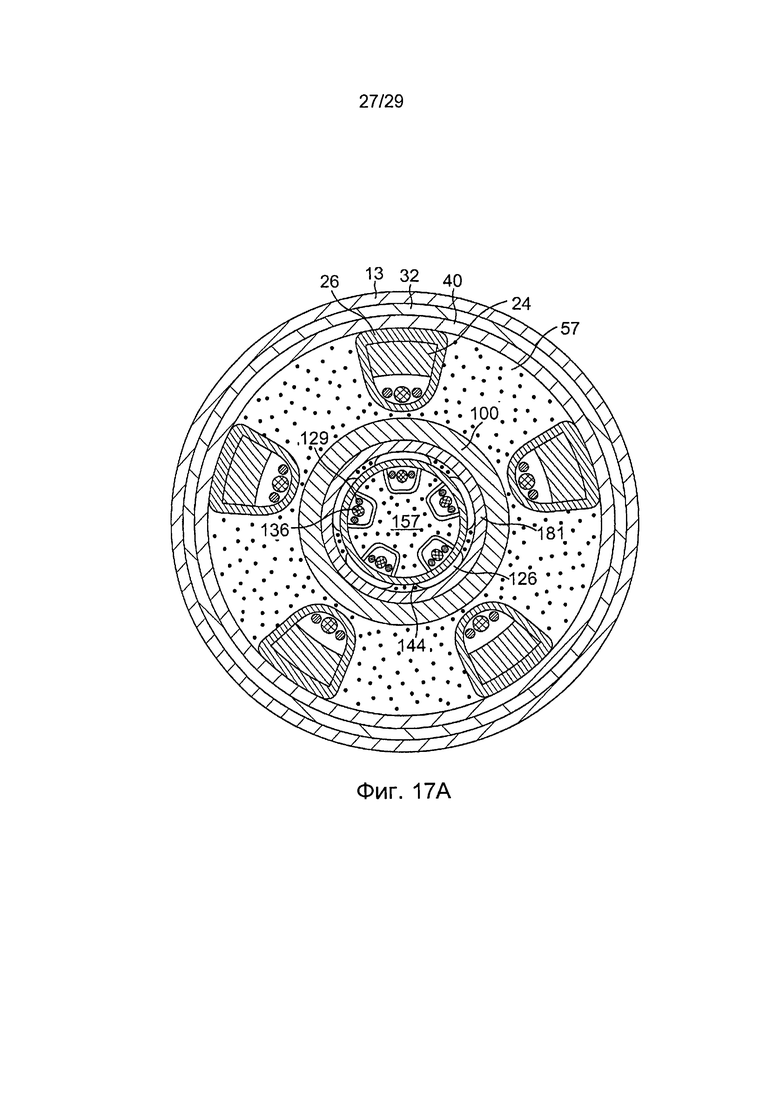
Фиг.17A является видом сзади в поперечном разрезе соединения с Фиг.17, изображенным вдоль линии A-A.
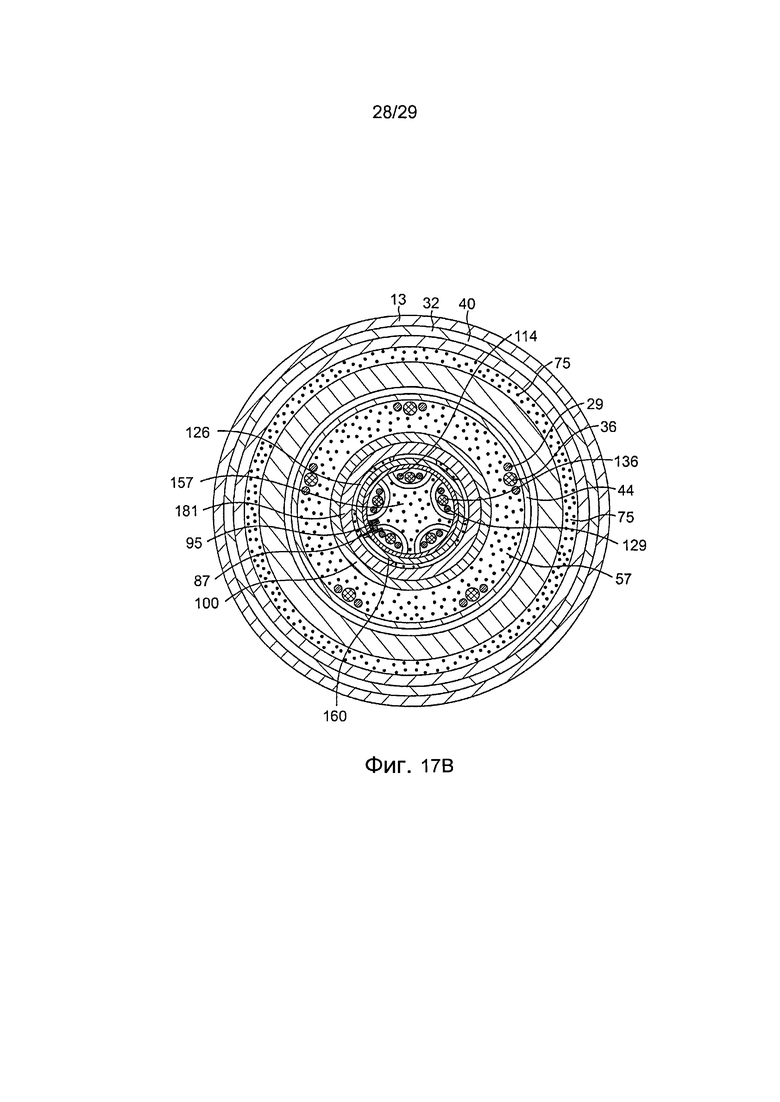
Фиг.17B является видом сзади в поперечном разрезе соединения с Фиг.17, изображенным вдоль линии B-B.
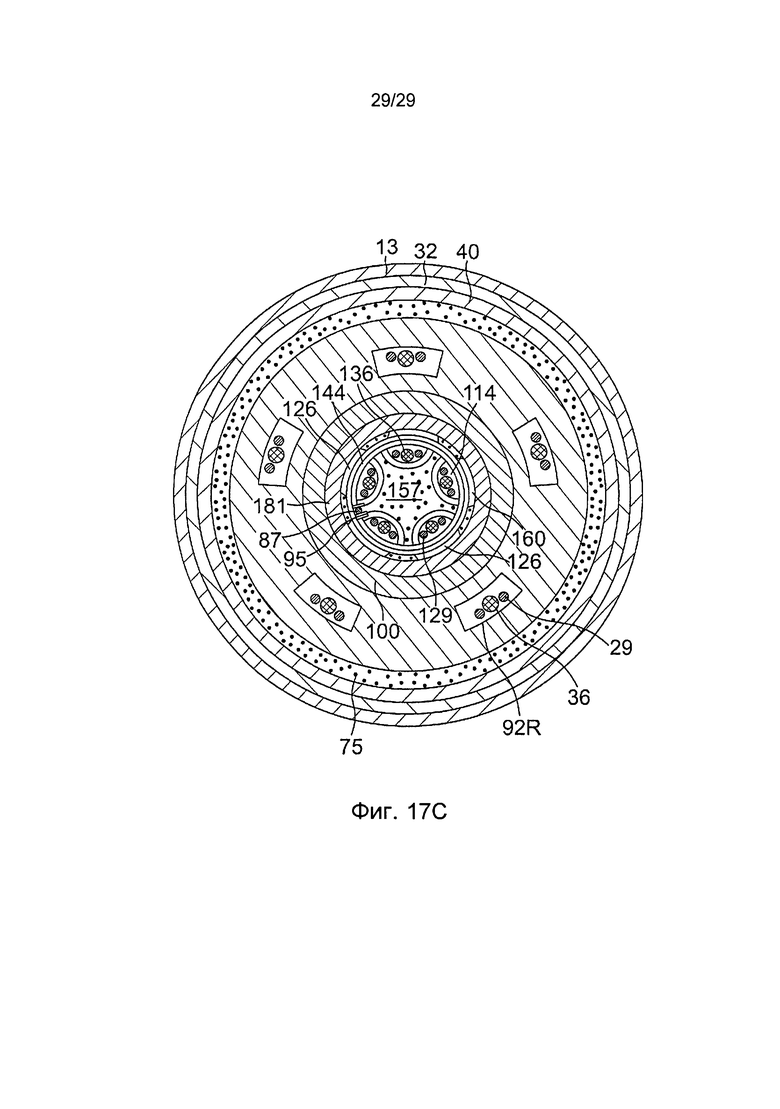
Фиг.17C является видом сзади в поперечном разрезе соединения с Фиг.17, изображенным вдоль линии C-C.
Фиг.18 является видом сбоку и сверху расширителя в форме свиного хвоста, который подходит для использования с катетером настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение относится к катетеру, включающему в себя дистальный сегмент, содержащий множество несущих. Дистальный сегмент содержит по меньшей мере один датчик положения, а каждая несущая удерживает по меньшей мере один электрод, предпочтительно точечный электрод и по меньшей мере один кольцевой электрод, благодаря чему при контакте несущих с тканью в трубчатом участке сердечнососудистой ткани каждая несущая может получать электрические, механические и установочные данные для картирования и/или передачи и получения электрической энергии, например, радиочастот, для абляции. В развернутом состоянии несущие могут принимать множество форм. Одна форма подразумевает, что каждая несущая принимает изогнутую кнаружи форму таким образом, чтобы каждая несущая контактировала с внутренней поверхностью ткани стенки сосуда у дистального конца каждой несущей (Фиг.1). Другая форма подразумевает, что каждая несущая принимает изогнутую вовнутрь форму (Фиг.15) таким образом, чтобы каждая несущая контактировала со внутренней поверхностью ткани стенки сосуда проксимальнее дистального конца каждой несущей. Еще одна форма подразумевает наличие линейных несущих (Фиг.4) таким образом, чтобы каждая несущая контактировала со внутренней поверхностью ткани стенки сосуда у дистального конца каждой несущей.
Как показано на фиг.1, катетер 10 включает удлиненный корпус катетера 12, имеющий проксимальный и дистальный концы, рукоятку управления 16 у проксимального конца корпуса катетера12 и дистальный сегмент 18, включающий множество несущих 14, смонтированных у дистального конца корпуса катетера 12.
Как показано на фиг.1 и 2, корпус катетера 12 представляет собой продолговатую тубулярную конструкцию, включающую единственный аксиальный или центральный канал 15, но по желанию катетер может иметь множество каналов по всей длине или части длины. Корпус катетера 12 является гибким, т.е. поддающимся изгибу, но по существу несжимаемым по всей длине. Корпус катетера 12 может иметь любую допустимую конструкцию и быть изготовленным из любого пригодного материала. В настоящее время предпочтительной является конструкция корпуса катетера 12, которая включает наружную стенку 13, изготовленную из полиуретана или PEBAX.RTM. (полиэфирблокамида). Наружная стенка 13 включает встроенную плетеную сетку из нержавеющей стали или подобную известную в данной области техники конструкцию для повышения жесткости на скручивание корпуса катетера 12 так, чтобы при вращении рукоятки управления 16 дистальный конец корпуса катетера 12 поворачивался соответствующим образом.
Длина корпуса катетера 12 некритична, однако она предпочтительно составляет от около 90 см до около 120 см, и наиболее предпочтительно составляет около 115 см. Наружный диаметр корпуса катетера 12 также некритичен, однако предпочтительно, чтобы он составлял не более 8 FR, более предпочтительно - около 7 FR. Аналогичным образом, толщина наружной стенки 13 некритична, но в предпочтительном случае достаточно тонка для того, чтобы центральный канал 15 мог вмещать в себя вытяжную проволоку, провод питания, кабель датчиков и любые другие провода, кабели или трубки. При необходимости внутреннюю поверхность наружной стенки 13 выстилают укрепляющей трубкой (не показана) для обеспечения дополнительной торсионной стабильности. Пример конструкции корпуса катетера, которая подходит для использования в настоящем изобретении, описан и изображен в патенте США № 6064905, раскрытие которого в полном объеме приведено в настоящем документе посредством ссылки.
В изображенном варианте осуществления дистальный сегмент 18 включает пять несущих 14. Каждая несущая 14 содержит проксимальный конец, прикрепленный к дистальному сегменту корпуса катетера 12, и свободный дистальный конец, то есть, дистальный конец может быть не прикреплен ни к одной из других несущих, корпусу катетера или иной структуре, осуществляющей движение дистального сегмента. Каждая несущая 14 включает поддерживающий рычаг 24, имеющий в составе металл или пластик, обладающий памятью формы, так что поддерживающий рычаг 24 принимает начальную форму, когда к нему не прилагается внешняя сила, принимает форму с отклонением при приложении внешней силы и возвращается к первоначальной форме, когда действие внешней силы прекращается. В одном варианте осуществления поддерживающий рычаг 24 имеет в составе суперэластичный материал, например, такой никель-титановый сплав, как нитинол. Каждая несущая 14 также имеет непроводящую оболочку 26 вблизи областей прилегания рычага 24. В одном варианте осуществления непроводящая оболочка 26 содержит биосовместимую пластиковую трубку, например, полиуретановую или полиимидную трубку.
Специалистам в данной области техники будет понятно, что количество несущих 14 может подбираться по желанию в зависимости от конкретного применения, так что катетер 10 может иметь по меньшей мере две несущие, предпочтительно три несущие, более предпочтительно по меньшей мере пять и вплоть до восьми и больше несущих. Как более подробно описывается ниже, несущие 14 могут эластично смещаться и перемещаться в развернутое состояние, в котором, например, каждая несущая радиально отходит кнаружи от корпуса катетера 12, или несущие 14 могут находиться в свернутом состоянии, в котором, например, каждая несущая расположена в целом вдоль продольной оси корпуса катетера 12 таким образом, чтобы несущие могли устанавливаться внутри канала направляющей оболочки, что более подробно обсуждается ниже.
Более того, развернутое состояние несущих 14 может принимать различные формы. Например, в описанном выше варианте осуществления каждая несущая 14 радиально отходит кнаружи от корпуса катетера 12 и принимает изогнутую вовнутрь форму, как показано на Фиг.1. В другом варианте осуществления, показанном на Фиг.4, каждая несущая 14 радиально отходит кнаружи от корпуса катетера 12 и принимает форму по существу прямой линии, которая предпочтительно по существу перпендикулярна корпусу катетера 12. В еще одном варианте осуществления, показанном на Фиг.5, каждая несущая 14 радиально изгибается кнаружи таким образом, что все несущие 14 вместе принимают форму чаши.
Глядя со стороны дистального конца корпуса катетера 12, как показано на Фиг.6A, несущие 14 дистального сегмента расположены в виде спирального рисунка, в котором каждая несущая имеет смежную несущую справа и смежную несущую слева, и каждая несущая находится в целом на одинаковом расстоянии от смежных несущих. Проксимальные концы несущих удерживаются в определенном положении в дистальном конце катетера при помощи клеящего вещества, или клея 57, который также изолирует проксимальный конец несущих катетера. В соответствии с особенностью настоящего изобретения длины по меньшей мере двух смежных несущих 14 отличаются таким образом, чтобы их дистальные концы не наносили или не определяли одинаковые контуры окружностей на ткани, которая выстилает трубчатый участок сердца. Например, на Фиг.6B, смежные несущие 14a и 14b определяют контуры различных окружностей Ca и Cb соответственно.
В одном варианте осуществления длины каждой несущей уникальны и отличаются от длин других несущих так, чтобы их дистальные концы не описывали одинаковые контуры окружностей, вместо этого каждая несущая описывает свою собственную уникальную окружность на ткани, которая выстилает трубчатый участок сердца. Например, на Фиг.6C, каждая несущая 14i определяет отдельный контур окружности Ci.
В частности, длина каждой следующей несущей увеличивается в радиальном направлении (по часовой стрелке или против нее) от «начальной» несущей 14a до «концевой» несущей 14e таким образом, чтобы их дистальные концы выстраивались в спиральный рисунок на ткани, которая выстилает трубчатый участок сердца. Например, на Фиг.6D, каждый дистальный конец и соответствующий ему очаг поражения Li определяют отдельный и расположенный дистальнее/глубже контур Ci, который очерчивает спиральный рисунок H. Исходя из Фиг.6D, на котором изображена часть (180 градусов) спирального рисунка, понятно, что полный (360 градусов) спиральный рисунок в рамках настоящего изобретения может быть образован при помощи дополнительных несущих и/или более радиального расположения изображенных пяти несущих.
В каждой из вышеупомянутых конфигураций несущих их дистальные концы не очерчивают одну общую окружность (или радиальную линию) за счет распределения и рассредоточения мест, в которых происходит контакт несущих с тканью трубчатого участка, что позволяет снизить риск развития стеноза трубчатого участка. Соответственно, места контакта с тканью (и, следовательно, полученные очаги абляции и поврежения L) по существу покрывают трубчатый участок в виде радиальных углов без образования разрывов электрических линий, которые расположены по контурам отдельных окружностей в трубчатом участке (Фиг.6A).
Как показано на фиг.7 и 7A, каждая несущая 14 содержит по меньшей мере один электрод, вмонтированный вдоль ее длины, предпочтительно в ее дистальном конце или возле него. В изображенном варианте осуществления точечный электрод 20 вмонтирован в дистальный конец каждой непроводящей оболочки 26, и по меньшей мере один кольцевой электрод 28 вмонтирован в каждую непроводящую оболочку 26, причем предпочтительно на дистальном конце непроводящей оболочки 26. В данном биполярном отведении кольцевой электрод 28 используется как отводящий электрод. Расстояние между точечным электродом и кольцевым электродом предпочтительно составляет от около 0,5 мм до около 2 мм. В альтернативном варианте биполярного отведения (не показано) точечный электрод 20 удален, а по меньшей мере два концевых электрода 28 вмонтированы в каждую непроводящую оболочку 26 предпочтительно на дистальном конце непроводящей оболочки 26. В другом альтернативном варианте осуществления (не показано) используется униполярное отведение, в котором точечный электрод 20 вмонтирован на дистальном конце каждой непроводящей оболочки 26, а один или более отводящий кольцевой электрод вмонтирован на дистальном конце корпуса катетера 12, или один или более отводящий электрод прикреплен за пределами тела пациента (например, в виде накладки). В альтернативном варианте униполярного отведения кольцевой электрод 28 вмонтирован в каждую непроводящую оболочку 26, предпочтительно на дистальном конце непроводящей оболочки 26, и используется вместо точечного электрода 20.
Длина каждого точечного электрода 20 варьируется от 0,5 до 8,0 мм, более желательно от 0,5 до 2,0 мм, но наиболее предпочтительно составляет около 1,0 мм. Каждый кольцевой электрод 28 имеет длину предпочтительно около 2,0 мм, более предпочтительно от 0,5 до 1,0 мм.
Каждый точечный электрод 20 и каждый кольцевой электрод 28 электрически подключены к проводу питания электрода 29, который, в свою очередь, электрически подключен к переходнику (не показан) у проксимального конца рукоятки управления 16. Переходник подключен к соответствующей системе картирования, мониторинга и абляции (не показана). Каждый провод питания 29 проходит через переходник 17, через рукоять управления 16, через центральный канал 15 в корпусе катетера 12 и уходит под непроводящую оболочку 26 несущей 14, где и подключается к соответствующему точечному 20 или кольцевому электроду 28. Каждый провод питания 29, который почти по всей своей длине имеет непроводящую оболочку, прикреплен к соответствующему точечному электроду 20 или кольцевому электроду 28 любым подходящим способом.
Электроды изготавливают из благородных металлов, которые можно использовать для визуализации, записи, стимуляции и абляции. Несколько электродов на несущей могут доставлять энергию во многих режимах. Энергия может доставляться к каждому электроду по отдельности, одновременно ко всем электродам или только к тем электродам, которые выбрал пользователь. Энергия может подаваться в униполярном и биполярном режимах. В электродах может быть просверлена серия отверстий для ускорения ирригации области абляции.
Способ крепления провода питания 29 к кольцевому электроду 28 в первую включает создание небольшого отверстия в наружной стенке непроводящей оболочки 26. Такое отверстие можно, например, проделать, приставив к наружному слою непроводящей оболочки 26 иглу и нагревая ее до образования постоянного отверстия в изоляции. После этого провод питания 29 протягивается через это отверстие при помощи микрокрючка или подобного инструмента. Конец провода питания 29 очищается от любого покрытия и припаивается к нижней стороне кольцевидного электрода 28, который затем смещают на его позицию и фиксируют на месте полиуретановым клеем или его аналогами. В качестве альтернативы кольцевой электрод 28 может быть изготовлен наматыванием провода питания 29 вокруг непроводящей оболочки 26 несколько раз и зачисткой проволоки питания от ее собственного изоляционного покрытия на внешних поверхностях. В подобных случаях провод питания 29 функционирует в роли кольцевого электрода.
Каждая несущая 14 также может включать по меньшей мере один датчик положения 30. Датчик положения 30 монтируется возле дистального конца каждой несущей. В изображенном варианте осуществления, в котором каждая несущая 14 содержит точечный электрод 20, датчик положения 30 вмонтирован таким образом, чтобы дистальный конец датчика положения 30 закреплялся внутри соответствующего точечного электрода 20, в то время как проксимальный конец датчика положения 30 выступает в дистальный конец непроводящей оболочки 26. Каждый датчик положения 30 используется для определения координат соответствующего точечного электрода 20 в каждый момент, когда точечный электрод 20 используется для сбора данных о месте установки во время электрического картирования. В результате электрические и установочные данные могут быть получены для каждой точки, которая была картирована. Если несущая 14 содержит по меньшей мере один кольцевой электрод 28, но не включает точечный электрод 20, датчик положения 30 монтируется возле дистального конца непроводящей оболочки 26, предпочтительно как можно ближе к дистальному концу несущей 14 или в плоскости, которая соосна кольцевому электроду 28.
Как показано на фиг.2 и 3, каждый датчик положения 30 подключается к соответствующему кабелю датчика 36. Каждый кабель датчика 36 проходит через непроводящую оболочку 26, корпус катетера 12 и рукоятку управления 16 и кнаружи через проксимальный конец рукоятки управления 16 внутри шнура с электроразрывным соединителем (не показан) к модулю управления датчиками (не показан), содержащему монтажную плату (не показан). В качестве альтернативы монтажная плата может находиться, например, внутри рукоятки управления 16, что описывается в патенте США № 6024739, раскрытие которого включено в настоящую заявку посредством ссылки. Кабель каждого датчика 36 содержит несколько проводов, заключенных в защитный пластиковый покров. В модуле контроля датчиков провода кабеля датчика 36 присоединяются к распределительному щиту. Распределительный щит усиливает сигнал, полученный от датчика 30 соответствующей области и передает на компьютер в понятной для компьютера форме посредством переходника от датчика на проксимальном конце модуля контроля датчиков. Кроме того, поскольку катетер 10 сконструирован только для одноразового использования, монтажная схема предпочтительно содержит чип EPROM, который отключает монтажную плату приблизительно через 24 часа после использования катетера 10. Это предотвращает повторное использование катетера 10 или, по меньшей мере, датчиков положения 30.
В одном варианте осуществления каждый датчик положения 30 является электромагнитным датчиком положения. Например, каждый датчик положения 30 может содержать катушку, чувствительную к магнитному полю, что описывается в патенте США № 5391199, или множество таких катушек, что описывается в международной заявке на патент № WO 96/05758. Множество спиралей позволяет получать координаты в 6 измерениях (например, три позиционные и три ориентировочные координаты) датчика положения 30. В качестве альтернативы может быть использован любой известный датчик, например электрический, магнитный или звуковой. Подходящие датчики положения для использования с настоящим изобретением также описаны, например, в патенте США №№ 5558091, 5443489, 5480422, 5546951 и 5568809, и публикациях международных заявок на патент № WO 95/02995, WO 97/24983 и WO 98/29033, раскрытия которых включены в настоящий документ посредством ссылки. Особенно предпочтительным датчиком положения 30 является однокоординатный датчик, имеющий длину от около 3 мм до около 7 мм, предпочтительно около 4 мм, что, например, описано в заявке на патент США Сер. № 09/882125, поданной 14 июня 2001 года, под названием «Position Sensor Having Core with High Permeability Material» («Датчик положения с сердцевиной из материала с высокой проницаемостью»), раскрытие которой включено в настоящий документ посредством ссылки. Для использования в настоящем изобретении особенно предпочтительны меньшие датчики, поскольку это позволило бы оставить диаметр несущих 14 достаточно малым для того, чтобы они помещались внутри канала направляющей оболочки. В альтернативном варианте осуществления отдельный датчик положения может находиться на дистальном конце корпуса катетера 12 или возле него, в отличие от датчиков положения в каждой несущей.
Фиг.7 и 7A изображают подходящий способ монтажа провода питания электрода 29, датчика положения 30 и поддерживающего рычага 24 на точечном электроде 20. Провод питания электрода 29 может быть прикреплен к точечному электроду 20 путем рассверливания первого слепого отверстия 48, предпочтительно просверленного, в точечном электроде 20, очистки провода питания 29 от любого покрытия и размещения провода питания 29 внутри первого слепого отверстия 48, в котором он электрически подключается к точечному электроду 20 подходящим способом, например, пайкой или сваркой. После этого провод питания 29 может быть зафиксирован на месте, например, с помощью полиуретанового клея или его аналогов. Датчик положения 30 может быть аналогичным образом зафиксирован в точечном электроде 20. Например, второе слепое отверстие 50, предпочтительно просверленное, может быть просверлено в точечном электроде 20 таким образом, чтобы датчик положения 30 мог быть установлен во втором слепом отверстии 50 и закреплен в нем, например, с помощью полиуретанового клея или его аналогов. Поддерживающий рычаг 24 может таким же образом быть зафиксирован в точечном электроде 20. Например, третье слепое отверстие 52, предпочтительно просверленное, может быть просверлено в точечном электроде 20 таким образом, чтобы поддерживающий рычаг 24 мог быть установлен в третье слепое отверстие 52 и закреплен в нем, например, с помощью полиуретанового клея или его аналогов. В качестве альтернативы единственное слепое отверстие (не показано) в проксимальном конце точечного электрода 20 может использоваться для монтажа датчика положения 30 и поддерживающего рычага 24, а дистальный конец провода питания 29 может быть обернут вокруг внешнего проксимального конца точечного электрода, который не оголен, и закреплен пайкой, сваркой или иным подходящим методом. Может быть использован любой способ закрепления этих компонентов на несущей.
Подходящая конструкция дистального конца корпуса катетера 12, включает смонтированные на нем несущие 14, как изображено на Фиг.2 и 3. В целях ясности только две несущие 14 показаны на Фиг.2. В дистальном конце канала 15 корпуса катетера 12 установлен узел монтажа несущих 31. Узел монтажа несущих 31 содержит внешнее монтажное кольцо 32, расположенное внутри наружной стенки 13 корпуса катетера 12. Внешнее монтажное кольцо 32 предпочтительно содержит металлический материал, такой как нержавеющая сталь (точнее, нержавеющая сталь 303), и может быть прикреплено к дистальному концу корпуса катетера 32 множеством способов, таких как пайка или использование адгезивных веществ, например полиуретанового клея. Альтернативный вариант: внешнее монтажное кольцо 32 может содержать пластик. Монтажная структура 34 устанавливается соосно внутри внешнего монтажного кольца 32. В показанном варианте осуществления монтажная структура 34 является многосторонней и содержит металлический материал, такой как нержавеющая сталь (точнее, нержавеющая сталь 303). Монтажная структура 34 может в качестве альтернативы содержать и пластиковый материал. Внешнее монтажное кольцо 32 и монтажная структура 34 образуют канал 38, в который монтируется проксимальный конец каждого поддерживающего рычага 24. Более конкретно, каждая несущая 14 монтируется в корпус катетера 12 путем удаления части непроводящей оболочки 26 на проксимальном конце каждой несущей 14, установки дистального конца каждого поддерживающего рычага 24 в канал 38 между внешним монтажным кольцом 32 и многосторонней монтажной структурой 34 и фиксации каждого поддерживающего рычага 24 внутри канала 38 любым подходящим способом, таким как полиуретановый клей или его аналоги.
В одном варианте осуществления поддерживающий рычаг 24 имеет в целом трапециевидное поперечное сечение с изогнутыми сторонами. При подобной организации, когда каждый поддерживающий рычаг 24 вводится в канал 38, а практически плоская поверхность каждого поддерживающего рычага 24 (предпочтительно основание трапециевидного поперечного сечения) монтируется напротив плоской поверхности на многосторонней монтажной структуре 34. Предпочтительное количество плоских наружных поверхностей на многосторонней монтажной структуре 34 должно соответствовать количеству несущих 14. В этом случае поддерживающий рычаг 24 каждой несущей 14 может быть смонтирован внутри канала 38 и парно с соответствующей стороной на многосторонней монтажной структуре 34, чтобы позволить поддерживающим рычагам 24 и несущим 14 быть равномерно распределенными вокруг многосторонней монтажной структуры 34. Многосторонняя монтажная структура 34 может быть практически соосной продольной оси корпуса катетера 12 так, чтобы несущие 14 были также равномерно распределены вокруг корпуса катетера 12. Как только каждый поддерживающий рычаг 24 правильно установится внутри канала 38, каждый поддерживающий рычаг 24 может быть зафиксирован внутри канала 38 любым подходящим способом, например, с применением клеящего вещества, такого как полиуретановый клей. В качестве альтернативы монтажная структура 34 может иметь круглую внешнюю поверхность, хотя такой вариант осуществления является более трудоемким, так как поддерживающие рычаги 24 потребуется равномерно распределить вокруг монтажной структуры.
В показанном варианте осуществления первая непроводящая трубка 40 расположена между наружным монтажным кольцом 32 и поддерживающими рычагами 24, а вторая непроводящая трубка 42 расположена между поддерживающими рычагами 24 и монтажной структурой 34. Непроводящие трубки 40 и 42, которые могут быть изготовлены из полиимида, обеспечивают электроизоляцию каждого поддерживающего рычага 24. Кроме того, внутренняя трубка монтажного кольца 44 закреплена внутри монтажной структуры 34. Внутренняя трубка монтажного кольца 44 предпочтительно содержит непроводящий материал, такой как полиимид. Внутренняя трубка монтажного кольца 44 образует канал монтажного кольца 46, через который проходят провода питания каждого электрода 29 и кабели датчиков 36.
Как уже указывалось выше, при монтаже поддерживающих рычагов 24 к узлу монтажа несущих 31 часть непроводящей оболочки 26 на проксимальном конце каждой несущей 14 удаляют для обнажения поддерживающего рычага 24. Удаление части непроводящей оболочки 26 на проксимальном конце каждой несущей 14 позволяет проводам питания электрода 29 и кабелям датчиков 36, соответствующим каждому точечному электроду 20, кольцевому электроду 28 и датчику положения 30, выходить из канала 15 катетера 12 через канал монтажного кольца 46 и попадать внутрь каждой непроводящей оболочки 26. Как показано на фиг.4, после вхождения под непроводящую оболочку 26 провода питания электродов 29 и кабели датчиков 36 проходят внутри непроводящей оболочки 26 и электрически подключены своими дистальными концами к соответствующему точечному электроду 20, кольцевому электроду 28 или датчику положения 30.
В альтернативном варианте осуществления поддерживающие рычаги 24 предусмотрены на цельном поддерживающем элементе 60, как показано на Фиг.8 и 9. Элемент 60 имеет проксимальную монтажную часть 62, причем поддерживающий рычаг 24 выступает продольно от дистального края 64 монтажной части 62. Монтажная часть 62 имеет открытый цилиндрический корпус 63, который содержит проходящий через него канал 61, причем каждая несущая содержит продолговатый конусный шток 65 и увеличенную дистальную часть 66. Шток 65 имеет расширенный проксимальный конец 67 и суженный дистальный конец 68. Увеличенная дистальная часть 66 имеет кривизну, которая определяется радиусом R цилиндрического корпуса 63 монтажной части 62, и в целом прямоугольную, или лопастевидную, форму с изогнутыми под углом проксимальными краями 69, непараллельными расходящимися боковыми краями 70 и ровным дистальным концом 71. В описанном варианте осуществления предпочтительно, чтобы длина кривой, или дуги, A66 увеличенной дистальной части 66 была больше, чем длина кривой, или дуги, A67 проксимального конца штока несущей. Более длинная дуга A67 в дистальной части каждого рычага 24 образует большую точку крепления, которая помогает удерживать на месте непроводящую оболочку 26 и, в свою очередь, кольцевые электроды 28. Суженный конусный шток 65 между монтажной частью 62 и увеличенной дистальной частью 66 позволяет каждой несущей 14 быть очень гибкой. В одном варианте осуществления цельный поддерживающий элемент 60 образован из продолговатого цилиндра, в котором был сделан продольный разрез 72 (например, при помощи лазера) для формирования каждого штока и несущей.
Непроводящая оболочка 26 вмонтирована в каждую несущую способом, аналогичным описанному выше в варианте осуществления с Фиг.2 с одиночными и отдельными несущими 14. Фиг.10 и 10A изображают аналогичный способ монтажа проводов питания электродов 29, датчиков положения 30 и поддерживающих рычагов 24 на точечных электродах 20 несущих цельного поддерживающего элемента 60. Слепые отверстия 48, 50 и 52 сформированы в точечном электроде 20, за исключением слепого отверстия 52, которое имеет трапециевидную форму для соответствия форме поперечного сечения продолговатой дистальной части 66 несущей.
Подходящая конструкция дистального конца корпуса катетера 12 с вмонтированный цельным поддерживающим элементом 60 изображена на Фиг.11 и 11A. В целях ясности только две несущие 14 показаны на Фиг.11. Цельный поддерживающий элемент 60 вмонтирован в дистальный конец канала 15 корпуса катетера 12. Цилиндрический корпус 63 проксимальной монтажной части 62 расположен между первой непроводящей трубкой 40 и внутренней трубкой монтажного кольца 44. Монтажная часть 62 может быть присоединена к дистальному концу корпуса катетера 12 различными способами, такими как сварка или использование клеящего вещества, например, полиуретанового клея 75. Провода питания 29 и кабель датчика 36 для каждой несущей 14 проходят через канал 61, покрытый внутренней трубкой 44. Предпочтительно, чтобы цилиндрический корпус 63 удерживал и закреплял проксимальные концы поддерживающих рычагов 24 в дистальном конце корпуса катетера 12, а также удерживал и закреплял каждый рычаг относительно другого радиально вокруг центрального конца корпуса катетера 12.
Независимо от формы и структуры поддерживающих рычагов 24 перемещение несущих 14 между развернутым и свернутым состояниями может осуществляться при помощи множества различных средств. Например, дистальный сегмент 18 может проходить в свернутом состоянии через направляющую оболочку 78 (Фиг.12), в которой создаваемая направляющей оболочкой сила сдавливания прилагается к дистальному сегменту при его продвижении к целевым участкам ткани. Если интродьюсер перемещается проксимально относительно дистального конца катетера для разворачивания несущих 14, сила сдавливания больше не прилагается направляющей оболочкой к несущим, и память формы поддерживающих рычагов 24 позволяет поддерживающим рычагам вернуться в развернутое состояние. В развернутом состоянии по меньшей мере один электрод от каждой несущей 14 может войти в контакт со множеством участков ткани, как показано на Фиг.6B, 6C и 6D.
Перемещение между развернутым и свернутым состояниями также может осуществляться или облегчаться при помощи плунжера 80, как показано на Фиг.13A-13C. Плунжер 80, отходящий от дистального конца катетера продольно и центрально, имеет полый продолговатый цилиндрический корпус 81 и подвижную дистальную головку плунжера 82, которая имеет форму увеличенного кольца со скошенной боковой поверхностью, которая может скользить вдоль наружной поверхности корпуса 81. Корпус 81 выступает из дистального конца катетера. В вариантах осуществления с Фиг.2 и 11 корпус 81 может отходить от центральной области 59 таким образом, чтобы корпус 81 радиально окружался проводами питания 29 и кабелями датчиков 36 от несущих 14.
Головка плунжера 82 в форме кольца со скошенной поверхностью содержит центральное отверстие 85, меньший проксимальный конец 82P и больший дистальный конец 82D (Фиг.13C), что обусловлено увеличивающимся диаметром изогнутой под углом криволинейной поверхности 83, которая входит в контакт и воздействует на несущие 14 для их распределения в радиальном направлении на расстоянии друг от друга, когда головка плунжера 82 отводится проксимально к дистальному концу корпуса катетера 12. Как изображено на фиг.13C и 13D, в центральном отверстии 85 установлена поперечина 84, концы которой находятся в противоположных пазах 86, которые сформированы в корпусе 81 плунжера 80. Дистальный конец вытяжной проволоки 87 закреплен на поперечине 84, например, при помощи слепого отверстия 88, сформированного в проксимальной поверхности поперечины 84. Вытяжная проволока 87 выходит из корпуса 81 плунжера 80, проходит через центральный канал 15 корпуса катетера 12 и входит в рукоятку управления 16, в которой она приводится в действие приводом (не показан), который предусмотрен в рукоятке управления. Приведенный в действие пользователем привод может отодвигать вытяжную проволоку 87 проксимально или выдвигать ее дистально для скольжения головки плунжера 82 вдоль его корпуса 81, что, в свою очередь, приведет к перемещению несущих 14 в развернутое состояние (Фиг.13B) или позволит несущим вернуться в свернутое состояние (Фиг.13A).
В более подробном варианте осуществления на Фиг.14 плунжер 80 смещается для перемещения несущих в свернутое положение пружиной 94 (показана в сжатом виде на Фиг.14), которая вмонтирована в корпус 81 плунжера 80 между дистальным стержнем 57 и головкой плунжера 82. Проксимальный конец пружины 94 упирается в дистальный кольцевой стопор 89D, зафиксированный на дистальном сегменте 18 при помощи стержня 57. Дистальный конец корпуса 81 проходит через стопор 89D, а также направляется и удерживается с возможностью скольжения стопором 89D. Пружина 94 сопротивляется сжатию и тем самым прикладывает к головке плунжера 82 направленное дистально усилие при отсутствии направленного проксимально усилия, прикладываемого к головке плунжера 82 вытяжной проволокой 87. Более того, как показано на Фиг.14A, проксимальный конец цельного поддерживающего элемента 60 может содержать проксимальную концевую пластину 90 со сквозным отверстием (сквозными отверстиями) или пазом (пазами) 92R и 92C, которые расположены центрально и радиально для удержания компонентов и/или обеспечения прохождения компонентов через пластину 90. В изображенном варианте осуществления концевая пластина 90 имеет центральное сквозное отверстие 92C, в котором устанавливается и удерживается с возможностью перемещения проксимальный конец 81P корпуса плунжера 81. Проксимальный кольцевой стопор 89P предусмотрен на проксимальном конце 81P для ограничения дистального перемещения головки плунжера 81 для предотвращения ее отсоединения от пластины 90. В пластине 90 предусмотрено множество радиально расположенных пазов 92R для обеспечения перемещения проводов питания 29 и кабелей датчиков 36.
В соответствии с другой особенностью настоящего изобретения катетер 110, изображенный на Фиг.15, содержит первый и второй дистальные сегменты 18 и 118, причем второй дистальный сегмент 118 расположен дистальнее первого дистального сегмента 18. Приведенное выше описание дистального сегмента 18 включено сюда в связи со вторым дистальным сегментом 118, причем аналогичные или дублирующие компоненты в первом и втором дистальных сегментах обозначены номерами позиций с двумя одинаковыми последними цифрами, например, 18 и 118. Второй дистальный сегмент 118 также содержит множество несущих 114, сконструированы аналогично несущим 14 первого дистального сегмента 18. Тем не менее, понятно, что различия между дистальными сегментами 18 и 118 могут подходить для использования в избранных областях применения. Например, дистальные сегменты могут содержать разное количество несущих, кроме того, несущие могут быть различной длины и/или расположены различным образом.
Как изображено на фиг.2, 2A, 11 и 11B, второй дистальный сегмент 118 содержит прямую продолговатую проксимальную часть 112, которая выступает из дистального конца корпуса катетера 12. В изображенном варианте осуществления конструкция прямой проксимальной части 112 сходна с конструкцией корпуса катетера 12, поскольку в наружной стенке 113 предусмотрен центральный канал 115, однако исключение составляет его меньший диаметр. В одном варианте осуществления часть 112 остается неподвижной относительно корпуса катетера 12 таким образом, что дистальные сегменты 18 и 118 остаются неподвижными относительно друг друга, включая фиксированное пространственное расположение, фиксированный пространственный разнос и/или фиксированное осевое и угловое соотношение друг с другом. Варианты осуществления соединения между корпусом катетера 12 и частью 112, которые подходят для использования с корпусом катетера 12 и дистальным сегментом 18 с Фиг.2 и 11, изображены на Фиг.2A и 11B соответственно, причем аналогичные компоненты обозначены похожими номерами позиций с двумя одинаковыми последними цифрами. Варианты осуществления второго дистального сегмента 118, которые подходят для использования с частями 112 на Фиг.2 и 11, изображены на Фиг.2B и 11C соответственно.
В соответствии с особенностью изобретения второй дистальный сегмент 118 может перемещаться в продольном направлении относительно второго дистального сегмента 118. Таким образом, второй дистальный сегмент 118 может осуществлять телескопическое движение относительно первого дистального сегмента 18. В этой связи предпочтительно, чтобы катетер позволял регулировать пространственный разнос между сегментами 18 и 118, и, как следствие, пространственный разнос между несущими 14 и 114. В том случае, если несущие каждого дистального сегмента расположены таким образом, чтобы их дистальные концы очерчивали спиральный рисунок (например, около 360 градусов), пространственный разнос между двумя сегментами может регулироваться таким образом, чтобы первый и второй спиральный рисунки сочетались или другим образом соединялись с образованием непрерывного спирального рисунка (который охватывает, например, более 360 градусов, предпочтительно более 540 градусов, и наиболее предпочтительно - около 720 градусов). В изображенном варианте осуществления с Фиг.15 дистальные концы несущих 14 первого дистального сегмента 18 очерчивают в целом спиральный рисунок от около 0 градусов до около 360 градусов, а дистальные концы несущих 114 второго дистального сегмента 118 очерчивают в целом спиральный рисунок от около 360 градусов до около 720 градусов. Расстояние D, занимаемое спиральным рисунком и определяемое по наиболее проксимальному концу несущей 14 первого дистального сегмента 18 и наиболее проксимальному концу несущей 114 второго сегмента 118, регулируется посредством телескопического движения между первым и вторым дистальными сегментами.
Вариант осуществления катетера с первым дистальным сегментом 18 и телескопическим вторым дистальным сегментом 118 изображен на Фиг.16. Каждый дистальный сегмент 18 и 118 содержит соответствующий цельный поддерживающий элемент 60 и 160. Первый цельный поддерживающий элемент 60 содержит концевую проксимальную пластину 90 со сквозным отверстием 92C, в котором устанавливается и удерживается с возможностью перемещения проксимальный конец цельного поддерживающего элемента 160. На проксимальном конце цилиндрического корпуса 181 предусмотрен проксимальный кольцевой стопорный элемент 189P для предотвращения отсоединения корпуса от концевой пластины 90. Проксимальный кольцевой стопорный элемент 189D предусмотрен возле дистального конца корпуса 181 для удержания с возможностью скольжения дистального конца корпуса 181 и ограничения его проксимального перемещения относительно цельного поддерживающего элемента 60 первого дистального сегмента 18.
Несущие 114 дистального сегмента 118 расположены дистальнее несущих 14 дистального сегмента 18, а их пространственный разнос регулируется при помощи вытяжной проволоки 87, дистальный конец которой закреплен в боковой стенке корпуса 181 Т-образным стержнем 95.
Становится понятно, что настоящее изобретение включает катетер, содержащий два или более дистальных сегмента, включая два или более фиксированных дистальных сегмента или два или более телескопических дистальных сегмента, которые расположены соосно продольной оси корпуса катетера 12.
В другом варианте осуществления настоящего изобретения поступательное движение второго дистального сегмента 118 относительно первого дистального сегмента 18 приводит в действие или изменяет расположение несущих 14 первого дистального сегмента 18. Например, поступательное движение второго дистального сегмента 118 изменяет смещение или кривизну несущих 14 первого дистального сегмента 18. Как показано на Фиг.17, цельный плунжер 180 второго дистального сегмента 118 удерживает проксимальные концы несущих 114. Плунжер 180 содержит проксимальный цилиндрический корпус 181 и увеличенную дистальную цельную головку плунжера 182 с изогнутой под углом криволинейной поверхностью 183, которая составляет единое целое с корпусом 181. При отведении плунжера 180 проксимально криволинейная поверхность 183 входит в контакт и воздействует на несущие 14 для их распределения в радиальном направлении при переходе из свернутого состояния в развернутое. Поддерживающая трубка 100, которая фиксируется к дистальному концу корпуса катетера 12 за счет изоляции стержня 57, удерживает с возможностью перемещения корпус 181 для его перемещения в продольном правлении относительно дистального конца корпуса катетера 12 в ответ на приведение пользователем в действие вытяжной проволоки 87. Проксимальный конец трубки 100 устанавливается в пазе 92C и удерживается при помощи концевой пластины 90 у проксимального конца цельного поддерживающего элемента 60.
Для использования катетера 10 настоящего изобретения кардиолог или электрофизиолог вводит в тело пациента направляющую оболочку и расширитель таким известным для специалистов в данной области образом, чтобы дистальные концы оболочки и расширителя находились в области сердца или другой структуры сердечнососудистой системы, которая подлежит картированию. В некоторых случаях, когда желательно введение катетера 10 в левый желудочек через аортальный клапан против направления тока крови, предпочтительно использовать расширитель в форме свиного хвоста 54, имеющий дистальный конец 56, который образует петлю 58, как показано на Фиг.18. Более конкретно, сторона петли 58 прижимается к створкам клапана и по существу служит в качестве тупого инструмента для проталкивания створок вовнутрь таким образом, чтобы они временно оставались вывернутыми, пока расширитель и интродьюсер продвигаются сквозь клапан. При использовании поверхности петли 58 для проталкивания створок клапана можно избежать возможного прокалывания створок клапана. Напротив, при проталкивании створок расширителем с прямым дистальным концом возможно прокалывание или другое повреждение створок. После продвижения расширителя и направляющей оболочки через клапан при помощи петли 58 внутрь левого желудочка створки аортального клапана возвращаются в свое исходное естественное положение.
Затем расширитель удаляется из направляющей оболочки, а катетер 10 вводится в тело пациента через направляющую оболочку. Для вставки катетера в направляющую оболочку один или более дистальные сегменты 18, 118 должны находиться в свернутом состоянии, в то время как каждая несущая 14, 114 должна быть расположена в целом вдоль продольной оси корпуса катетера 12. Подходящий интродьюсер для использования с катетером - это плетеный интродьюсер PREFACE.TM. (в продаже производства Biosense Webster, Inc., г. Даймонд-Бар, штат Калифорния). Такой интродьюсер достаточно прочен для удержания каждого поддерживающего рычага 24, 124 в свернутом состоянии таким образом, чтобы несущие 14, 114 и остальная часть катетера могли перемещаться внутри интродьюсера от точки его введения пациенту по вене или артерии к необходимому участку сердца. После достижения дистальным концом катетера необходимого участка, который может находиться в левом желудочке сердца, предусматривается продольное перемещение катетера относительно интродьюсера для обеспечения выступания по меньшей мере части каждой несущей 14, 114 из-под интродьюсера. Предпочтительно, чтобы интродьюсер перемещался проксимально относительно дистального конца катетера для разворачивания несущих 114, которые следуют за несущими 14. Когда часть каждой несущей 14, 114 выступает из-под интродьюсера, а интродьюсер больше не прикладывает силу сдавливания к несущим, память формы поддерживающих рычагов 24, 124 позволяет поддерживающим рычагам возвращаться к первому развернутому состоянию. В первом развернутом состоянии по меньшей мере один электрод каждой несущей 14, 114 может помещаться в контакт со множеством участков сердечной ткани. В частности, дистальные концы несущих каждого дистального сегмента могут очерчивать спиральный рисунок, причем один рисунок должен располагаться дистальнее другого. В том случае, если пользователь может регулировать пространственный разнос между двумя дистальными сегментами 18 и 118, пользователь управляет вытяжной проволокой 87 для расположения двух сегментов таким образом, чтобы дистальные концы несущих 14 и 114 очерчивали непрерывный спиральный рисунок с желаемым оборотом, например, более 360 градусов, предпочтительно около 540 градусов, и наиболее предпочтительно - около 720 градусов. Катетер 10 настоящего изобретения с одним или более дистальными сегментами позволяет кардиологу картировать и/или проводить абляцию структур сердца или сердечнососудистой системы быстрее, чем при помощи традиционных катетеров за счет обеспечения одновременного множественного контакта с тканью при минимизации риска стеноза.
При желании катетер может содержать устройство управления направлением перемещения для отклонения дистального конца корпуса катетера 12. При такой конструкции дистальный конец корпуса катетера 12 предпочтительно содержит трубки небольшой длины, например, от 5,08 до 10,2 см (от 2 до 4 дюймов), которые гибче остального корпуса катетера 12. Подходящее устройство управления направлением перемещения содержит вытяжную проволоку (не показана), которая выходит из проксимального конца рукоятки управления 16, проходит через центральный канал 15 в корпусе катетера 12 и входит в неосевой канал короткой трубки. В корпусе катетера 12 вытяжная проволока проходит через гибкую и плотно намотанную, но несжимаемую спираль. Спираль фиксируется возле проксимального и дистального концов корпуса катетера 12 и предотвращает изгибание корпуса катетера 12. Дистальный конец вытяжной проволоки закреплен у дистального конца короткой трубки внутри ее неосевого канала. Проксимальный конец вытяжной проволоки прикреплен к подвижному элементу в рукоятке 16, который может перемещаться относительно корпуса катетера 12. Проксимальное перемещение подвижного элемента относительно корпуса катетера 12 приводит к изгибанию короткой трубки. Пример такого устройства управления направлением перемещения и конструкция более подробно описаны в патенте США № 6064905, раскрытие которого включено в настоящую заявку посредством ссылки. При встраивании устройства управления направлением перемещения в катетер 10 настоящего изобретения может быть желательно включение датчика положения в дистальный конец корпуса катетера 12. Специалисту в данной области техники будет понятно, что при невключении в конструкцию устройства управления направлением перемещения рукоятка 16 может быть удалена, хотя она описывается как поддерживающая рукоятка, которая облегчает использование устройства кардиологом.

Изобретение относится к медицинской технике, а именно к катетерам. Катетер содержит удлиненный корпус катетера и дистальный сегмент, расположенный дистальнее удлиненного корпуса катетера и содержащий по меньшей мере четыре несущие, причем каждая из по меньшей мере четырех несущих имеет проксимальный конец, фиксированно прикрепленный к дистальному концу удлиненного корпуса катетера, и свободный дистальный конец. Причем каждая из по меньшей мере четырех несущих содержит поддерживающий рычаг с памятью формы, непроводящую оболочку вблизи областей прилегания поддерживающего рычага и по меньшей мере один электрод. Причем по меньшей мере четыре несущие закреплены радиально вокруг продольной оси дистального сегмента, и длина каждой из по меньшей мере четырех несущих увеличивается по кругу относительно продольной оси катетера, и каждая из по меньшей мере четырех несущих отходит радиально наружу от корпуса катетера, когда дистальный сегмент находится в развернутом состоянии. 6 з.п. ф-лы, 17 ил.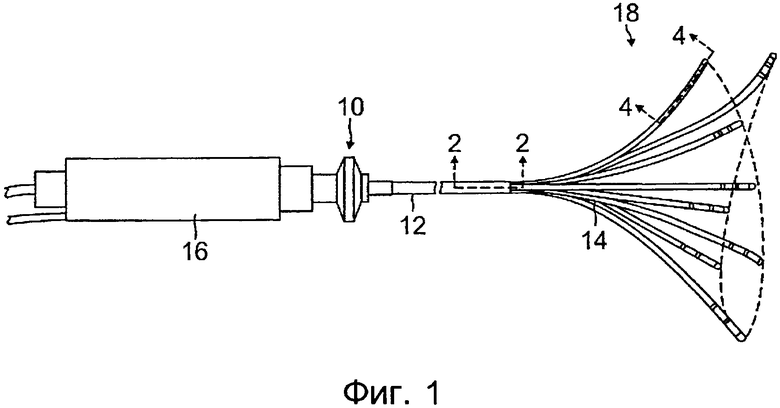
1. Катетер, содержащий:
удлиненный корпус катетера; и
дистальный сегмент, расположенный дистальнее удлиненного корпуса катетера и содержащий по меньшей мере четыре несущие, причем каждая из по меньшей мере четырех несущих имеет проксимальный конец, фиксированно прикрепленный к дистальному концу удлиненного корпуса катетера, и свободный дистальный конец,
причем каждая из по меньшей мере четырех несущих содержит:
поддерживающий рычаг с памятью формы;
непроводящую оболочку вблизи областей прилегания поддерживающего рычага; и
по меньшей мере один электрод,
причем по меньшей мере четыре несущие закреплены радиально вокруг продольной оси дистального сегмента, и длина каждой из по меньшей мере четырех несущих увеличивается по кругу относительно продольной оси катетера, и каждая из по меньшей мере четырех несущих отходит радиально наружу от корпуса катетера, когда дистальный сегмент находится в развернутом состоянии.
2. Катетер по п.1, в котором по меньшей мере один электрод каждой из по меньшей мере четырех несущих вмонтирован в свободный дистальный конец соответствующей одной из по меньшей мере четырех несущих или возле него и электрически изолирован от поддерживающего рычага.
3. Катетер по п.1, в котором по меньшей мере один электрод включает в себя по меньшей мере один кольцевой электрод, вмонтированный вблизи областей прилегания непроводящей оболочки.
4. Катетер по п.1, в котором каждый поддерживающий рычаг содержит нитинол.
5. Катетер по п.1, в котором, если дистальный сегмент находится в свернутом состоянии, каждая из по меньшей мере четырех несущих в основном располагается по продольной оси удлиненного корпуса катетера.
6. Катетер по п.1, в котором, если дистальный сегмент находится в развернутом состоянии, каждая из по меньшей мере четырех несущих выступает радиально наружу от корпуса катетера и принимает изогнутую форму.
7. Катетер по п.1, дополнительно содержащий плунжер, имеющий криволинейную поверхность для изгибания несущих.
| US 2003125614 A1, 03.07.2003 | |||
| US 5980517 A, 09.11.1999 | |||
| US 7181288 B1, 20.02.2007 | |||
| US 2008319436 A1, 25.12.2008. |

