Изобретение относится к средствам подводной навигации и может быть использовано для навигационного обеспечения автономных подводных роботов (АПР) большой дальности действия и контролируемых с борта обеспечивающего судна (ОС).
Известен способ навигационного обеспечения автономного подводного робота (АПР), в котором определяют координаты АПР на его борту и параллельно на борту обеспечивающего судна (ОС). Способ основан на обработке данных о дальности АПР и судовой гидроакустической навигационной антенны (СНА) относительно сети стационарных маяков-ответчиков (МО), донных [1] или поверхностных [2]. Способ реализуется в системах, называемых гидроакустическими навигационными системами с длинной базой (ГАНС ДБ).
Недостаток этих систем - необходимость предварительной установки в районе работ сети стационарных МО, что ограничивает район работ дальностью действия стационарных МО и увеличивает время на подготовку работы систем. Кроме того, увеличивается стоимость навигационных систем за счет необходимости применения нескольких сложных автономных подводных систем, какими являются стационарные маяки-ответчики.
Известен способ навигационного обеспечения АПР, в котором определяют и обрабатывают данные о дальности и угловом положении АПР относительно ОС [3]. Известный способ реализуется в гидроакустических навигационных системах с ультракороткой базой (ГАНС УКБ). В таких оперативно развертываемых гидроакустических навигационных системах, не требующих предварительной подготовки района работ с установкой МО, решение задачи определения местоположения АПР на борту ОС достигается обработкой данных, принимаемых многоэлементной судовой навигационной антенной при излучении синхронизированных навигационных сигналов с борта АПР. При приеме сигнала определяют его фазовую структуру на апертуре навигационной антенны и рассчитывают дальность и угловое положение источника сигналов [4].
Недостатком такого способа является меньшая, чем в дальномерных системах, точность и отсутствие оперативной навигационной информации на борту АПР.
Известен способ навигационного обеспечения [5], в котором определяют координаты стартовой точки АПР, непрерывно измеряют вектор абсолютной скорости и счисляют траекторию по данным бортовых датчиков курса, скорости и глубины.
Недостатком такого способа навигационного обеспечения АПР является низкая точность при длительной работе за счет быстрого накопления ошибки, величина которой прямо зависит от времени работы, и отсутствие оперативной навигационной информации на борту обеспечивающего судна.
Известен способ подводной навигации, основанный на комплексной обработке данных от различных устройств, реализующих известные способы навигационного обеспечения [6-9]. Данный способ позволяет увеличить точность навигации и упростить организацию работ.
На основании известного способа подводной навигации реализуются системы навигационного обеспечения АПР, которые включают:
- устройство комплексирования навигационных данных;
- систему счисления на борту аппарата;
- средства приема и излучения гидроакустических навигационных сигналов;
- ряд автономных опорных гидроакустических маяков (ОГМ), координаты которых известны на борту АПР;
- систему двухсторонней гидроакустической связи между АПР и ОС.
В соответствии с этим способом навигационного обеспечения определяют локальные координаты АПР на его борту, счисленные по данным бортовых датчиков курса, скорости и глубины, затем корректируют накапливающиеся ошибки по дальномерным данным, принимаемым на борту АПР. Ошибку счисления корректируют путем периодического определения положения объекта по измеряемым дальностям от серии маяков, предварительно установленным в районе работ. Причем координаты МО не устанавливаются перед началом работ на борту АПР, а передаются от МО по гидроакустической линии связи. Сами МО могут быть как стационарными, так и не стационарными. В последнем случае они обладают дополнительными средствами для определения своих текущих координат, например, имея средства спутниковой навигации с размещением элементов маяков на поверхности моря [10].
Работа систем возможна также при наличии только одного опорного маяка с измерением дальности до маяка из ряда точек специальной траектории аппарата, которую он выполняет для решения навигационной задачи путем накопления траекторных дальномерных данных [11].
Недостатками такого способа навигационного обеспечения АПР являются ограниченный район работы навигационных систем из-за привязки района работ к зоне действия независимых опорных маяков, а также непроизводительные потери времени, которые требуются на выполнении коррекции данных, получаемых счислением, при уменьшении числа маяков до одного, за счет выполнения специальных галсов в окрестности этого маяка и отсутствие оперативной навигационной информации на борту сопровождающего судна.
Известен также способ навигационного обеспечения АПР [12], совершающего протяженную миссию с контролем на борту ОС. В этом способе на борту АПР устанавливают координаты его стартовой точки, затем счисляют траекторию его движения по данным датчиков скорости, курса и глубины, после чего принимают навигационные сигналы, излучаемые ОГМ с известными координатами. Определяют собственные координаты АПР относительно ОГМ путем измерения его дальности и углового положения. Полученные координатные данные комплексно обрабатывают, получают оценку координат АПР на его борту, передают ее по гидроакустическому каналу на борт ОС. На борту ОС отображают траекторию движения АПР.
Данный способ навигационного обеспечения основан на использовании сети внешних опорных стационарных гидроакустических маяков, излучающих навигационные сигналы, наличии бортовой системы измерения дальности маяков, специальной системы гидроакустической связи между ОС и АПР. Каждый из этих маяков по очереди является опорным в своем районе трассы работ. Положение АПР определяется путем измерения дальности и углового положения ОГМ, координаты которого предварительно установлены на АПР. Рассчитанные на борту АПР комплексированные навигационные данные по гидроакустической системе связи передаются на борт ОС, позволяя контролировать ход работ в реальном времени. Для коррекции системы счисления применяют только один ОГМ с известными координатами, а для увеличения оперативности на борту АПР дополнительно устанавливают измеритель углового положения ОГМ.
Этот способ навигационного обеспечения АПР, контролируемого с борта ОС, по своему функциональному назначению, по своей технической сущности и достигаемому техническому результату наиболее близок заявляемому и принят за прототип.
Недостатками известного способа навигационного обеспечения АПР, контролируемого с борта ОС, при его реализации в навигационных системах для АПР с большой дальностью действия являются:
- необходимость предварительной установки большого числа стационарных опорных гидроакустических маяков вдоль трассы движения АПР и их точного координирования;
- необходимость установки специальной аппаратуры гидроакустической системы связи.
Указанные недостатки в целом значительно увеличивают время проведения работ и их стоимость.
В основу изобретения положена задача разработать способ навигационного обеспечения автономного подводного робота, большой дальности действия и контролируемого с борта ОС, с использованием одного ОГМ и при этом без дополнительной специальной аппаратуры гидроакустической системы связи.
При этом данный способ должен обеспечить быструю, точную и неограниченную по дальности работу с возможностью оперативного отображения в реальном времени и географических координатах траектории движения АПР как на его борту, так и на борту ОС.
Поставленная задача решается тем, что в способе навигационного обеспечения автономного подводного робота, контролируемого с борта обеспечивающего судна, на борту автономного подводного робота устанавливают координаты его стартовой точки, счисляют траекторию его движения по данным датчиков скорости, курса и глубины, принимают навигационные сигналы, излучаемые опорным гидроакустическим маяком с известными координатами, определяют собственные координаты автономного подводного робота относительно опорного гидроакустического маяка путем измерения его дальности и углового положения, полученные координатные данные комплексно обрабатывают, получают оценку координат автономного подводного робота на его борту, передают ее по гидроакустическому каналу на борт обеспечивающего судна и отображают на борту обеспечивающего судна траекторию движения автономного подводного робота, обеспечивающее судно перемещают в соответствии с движением автономного подводного робота вдоль его трассы, опорный гидроакустический маяк выполняют буксируемым, дополнительно на нем устанавливают приемник навигационных сигналов, соединяют кабельной линией связи с обеспечивающим судном и выставляют посредством буксирующего устройства за борт обеспечивающего судна, совмещают его движение с движением обеспечивающего судна, а на борту автономного подводного робота дополнительно устанавливают передатчик навигационных сигналов, при этом координаты стартовой точки автономного подводного робота и текущие координаты опорного гидроакустического маяка определяют средствами судовой навигации и передают по кабельной линии связи на опорный гидроакустический маяк и далее по гидроакустическому каналу на борт автономного подводного робота в составе навигационных сигналов, излучаемых опорным гидроакустическим маяком, а полученные на борту автономного подводного робота данные комплексной обработки информации, содержащие оценку его координат, в составе обратного навигационного сигнала по гидроакустическому каналу передают на опорный гидроакустический маяк, а затем по кабельной линии связи на борт обеспечивающего судна.
В заявленном способе навигационного обеспечения АПР, контролируемого с борта ОС, общими существенными признаками для него и для его прототипа являются:
- устанавливают на борту АПР координаты его стартовой точки;
- счисляют траекторию его движения по данным датчиков скорости, курса и глубины;
- принимают навигационные сигналы, излучаемые ОГМ с известными координатами;
- определяют собственные координаты АПР относительно ОГМ путем измерения его дальности и углового положения;
- комплексно обрабатывают полученные координатные данные;
- получают оценку координат АПР на его борту;
- передают ее по гидроакустическому каналу на борт ОС и отображают на борту ОС траекторию движения АПР.
Сопоставительный анализ заявляемого технического решения и прототипа показывает, что первое имеет в отличие от прототипа следующие существенные признаки:
- обеспечивающее судно перемещают в соответствии с движением АПР вдоль его трассы;
- ОГМ выполняют буксируемым;
- дополнительно устанавливают на ОГМ приемник навигационных сигналов;
- соединяют ОГМ кабельной линией связи с ОС и выставляют посредством буксирующего устройства за борт ОС;
- совмещают движение ОГМ с движением ОС;
- устанавливают дополнительно на борту АПР передатчик навигационных сигналов;
- определяют координаты стартовой точки АПР и текущие координаты ОГМ средствами судовой навигации и передают по кабельной линии связи на ОГМ и далее по гидроакустическому каналу на борт АПР в составе навигационных сигналов, излучаемых ОГМ;
- передают полученные на борту АПР данные комплексной обработки информации, содержащие оценку его координат, в составе обратного навигационного сигнала по гидроакустическому каналу на ОГМ, а затем по кабельной линии связи на борт ОС.
В заявленном способе навигационного обеспечения АПР высокая точность определения местоположения АПР обеспечена комплексным использованием системы счисления и средств коррекции системы счисления. Высокая оперативность и расширение района работ АПР достигаются за счет отсутствия опорных стационарных гидроакустических маяков и за счет того, что ОГМ, обеспечивающий работу навигационной системы, выполнен буксируемым и его движение совмещено с движением ОС. Зона работ АПР ограничена только его автономностью и скоростью. Время подготовки навигационной системы к работе определяется только временем вывешивания за борт ОС буксирующего устройства и ОГМ, т.е. значительно меньше времени постановки опорных стационарных гидроакустических маяков. Кроме того, в заявленном способе навигационного обеспечения АПР, контролируемого с борта ОС, отсутствует специальная аппаратура гидроакустической связи АПР с ОС, а информационный обмен обеспечивается аппаратурой навигационной системы за счет применения специальных навигационных сигналов, содержащих необходимую навигационную информацию, что упрощает в целом средства навигации и контроля.
Совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигаемым техническим результатом. На основании изложенного можно заключить, что заявленное техническое решение является новым и обладает изобретательским уровнем, т.к. явным образом не следует из уровня техники и пригодно для промышленного применения.
Сущность изобретения поясняется чертежом, на котором изображена структурная схема реализации способа навигационного обеспечения АПР, контролируемого с борта ОС, с распределением оборудования на борту АПР и ОС.
На АПР установлена аппаратура: 1 - устройство счисления пути по данным датчиков курса, глубины и абсолютной скорости; 2 - приемник навигационных сигналов, включающий: 3 - измеритель дальности АПР - ОГМ; 4 - измеритель углового положения ОГМ (пеленга и угла места); 5 - устройство обработки первого навигационного сигнала для выделения координатной информации; 6 - устройство комплексной обработки навигационных данных; 7 - передатчик навигационных сигналов, содержащих информацию о текущих координатах автономного подводного робота.
На опорном гидроакустическом маяке установлены: 8 - приемник навигационных сигналов, включающий устройство обработки навигационного сигнала для выделения координатной информации; 9 - передатчик навигационных сигналов, содержащих информацию о текущих координатах ОС. ОГМ выполнен буксируемым, посредством буксирующего устройства вывешен за борт ОС и соединен кабельной линией связи с ОС. Таким образом, ОГМ можно считать неотъемлемой частью аппаратуры, установленной на ОС.
Перечисленные устройства, устанавливаемые на борту АПР и ОС, хорошо известны. Их описание даны, например, в [13, глава 3 и глава 5].
Способ навигационного обеспечения АПР, контролируемого с борта ОС, реализуется следующим образом.
Предварительно на ОГМ устанавливают приемник 8 навигационных сигналов, а на АПР дополнительно устанавливают передатчик 7 навигационных сигналов. АПР посредством судовых средств опускают в воду, после чего АПР выполняет движение по заданной программе. ОГМ посредством буксирующего устройства, представляющего обычно обтекаемый корпус с кабель-тросом, выставляют за борт ОС. Затем навигационными судовыми средствами устанавливается стартовая точка АПР с координатами x0, y0, принимаемая за начало координат в локальной координатной системе. ОС перемещают в соответствии с движением АПР. Далее на борту АПР устройство 1 счисления пути определяет координаты xd, yd АПР интегрированием составляющих скорости vx, vy и передает их в устройство 6 комплексной обработки навигационных сигналов. С борта ОС через кабельную линию связи и передатчик 9 навигационных сигналов ОГМ излучается навигационный сигнал. Этот сигнал принимается измерителем 3 дальности и измерителем 4 углового положения ОГМ приемника 2 навигационных сигналов на борту АПР. Вычисленные значения наклонной дальности D, пеленга β и угла места γ передаются в устройство 6 комплексной обработки навигационных сигналов. Навигационный сигнал объединяют с информационным сигналом, в котором содержится информация о текущих координатах ОГМ, получаемого из судовых навигационных средств xc, yc. Эти данные обрабатываются устройством 5 обработки принятого навигационного сигнала для выделения координат АПР в составе навигационного приемника на борту АПР и передаются в устройство 6 комплексной обработки навигационных сигналов. В устройстве 6 комплексной обработки навигационных сигналов получают оценку координат АПР по данным гидроакустической навигационной системы (ГАНС), составленной из передатчика 9 навигационных сигналов размещенного в составе ОГМ обеспечивающего судна, измерителя 3 дальности и измерителя 4 углового положения ОГМ на борту АПР:
(xu,yu)=(xc - Dcosβcosγ, yc - Dsinβcosγ).
Полученные дискретные оценки координат АПР комплексируются с непрерывно получаемыми координатными системами счисления данными xd, yd, и после фильтрации с использованием алгоритмов [5, стр.165-171] формируется взвешенная оценка координат автономного подводного робота:
(xa, ya)=A(xd, yd)+B(xu, yu),
где А, В - операторы комплексирования.
Эти данные в составе кодированной навигационного сигнала передаются с АПР по гидроакустическому каналу, принимаются приемником 8 навигационных сигналов ОГМ, затем передаются по кабельной линии связи на борт ОС и отображаются в реальном времени. В составе ОГМ для приема и передачи навигационных сигналов используется одна гидроакустическая антенна и один приемопередающий тракт аппаратуры. Аналогичный комплект аппаратуры на борту АПР дополнен многоэлементной приемной антенной измерителя 4 углового положения ОГМ и соответствующей аппаратурой обработки многоканальных данных. Навигационное обеспечение АПР, контролируемого с борта ОС, осуществляют при перемещении ОС в соответствии с движением АПР, выполняющего рабочую программу.
Таким образом, заявленный способ навигационного обеспечения АПР, контролируемый с борта ОС, обладает:
- большей оперативностью определения местоположения АПР и отображением маршрута его движения на борту АПР и на борту ОС, поскольку все средства навигации и контроля (буксирующее устройство с размещенным в нем ОГМ) размещены только на ОС;
- расширением зоны работ АПР за счет движения судна и соответственно перемещения ОГМ вслед за перемещением АПР;
- упрощенная структура устройств за счет отсутствия специализированной системы связи.
Способ навигационного обеспечения АПР, контролируемого с борта ОС, разработан в Институте проблем морских технологий, прошел лабораторные и натурные испытания и используется для навигационного обеспечения автономных подводных роботов.
Используемая литература
1. Патент РФ №713278, МПК G01S 9/60, 1978 г., «Гидроакустическая синхронная дальномерная навигационная система», авторов Касаткин Б.А., Кобаидзе В.В.
2. S.Desset, R.Damus, J.Morash, С.Bechaz. Use of GIBs in AUVs for Underwater Archaeology. - Sea Technology, 2003, December, p.22-27.
3. Милн П.Х. Гидроакустические системы позиционирования. - Л., Судостроение, 1989, 316 с.
4. Патент РФ №2179730, «Пеленгатор гидроакустической навигационной системы с ультракороткой базой», авторов Матвиенко Ю.В., Макаров В.Н., Кулинченко С.И., Нургалиев Р.Ф., Рылов Р.П., Касаткин Б.А.
5. Агеев М.Д., Касаткин Б.А., Киселев Л.В., Молоков Ю.Г., Никифоров В.В., Рылов Н.И. Автоматические подводные аппараты. - Л., Судостроение, 1981, 248 с.
6. A.Scherbatjuk. Integrated Positining System for Underwater Autonomous Vehicle MT-88. - OCEANS 94, vol.3, p.384-388.
7. M.Uliana, F. Andreucci, B.Papalia. The Navigation System of an Autonomous Underwater Vehicle for Antarctic Exploration. - Proceeding of MTS/IEEE OCEANS-97.
8. K.Vestgard, R.Hansen, B.Jalving and H.Pedersen. The HUGIN 3000 Survey AUV - Design and Field Results. - /Underwater Intervention 2001/.
9. J.C.Kinsey, L.L.Whitcomb Preliminary Experiments with a Calibration Technique for Gyro and Doppler Navigation Sensors for Precision Underwater Navigation Proceeding of MTS/IEEE OCEANS-97.
10. Patent US №5579285, Nov. 26, 1996. Method and device for the monitoring and remote control of unmanned mobile underwater vehicle.
11. Patent WO 01/65274, Larsen Mikael. Methods and Systems for Navigating under Water, 2001, March.
12. Satoshi Tsukioka, Taro Aoki, Takashi Murashima. Experimental Results of an Autonomous Underwater Vehicle «Urashima» - Oceans-2003, p.940-945 - прототип.
13. Автономные подводные роботы. Системы и технологии. /М.Д.Агеев, Л.В.Киселев, Матвиенко Ю.В. и др./ - М.: Наука, 2005, 398 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ НАВИГАЦИИ АВТОНОМНОГО ПОДВОДНОГО РОБОТА | 2013 |
|
RU2524052C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход | 2018 |
|
RU2687844C1 |
| Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата | 2018 |
|
RU2689281C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО РОБОТА С ИСПОЛЬЗОВАНИЕМ ОДНОМАЯКОВОЙ СИСТЕМЫ | 2014 |
|
RU2556326C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата, выполняющего мониторинг подводного добычного комплекса | 2021 |
|
RU2756668C1 |
| Способ позиционирования автономного подводного аппарата в глубоком море | 2022 |
|
RU2792922C1 |
| Способ навигационной поддержки группы специализированных подводных аппаратов, выполняющих общую миссию в мелководной акватории | 2023 |
|
RU2819199C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Гидроакустическая навигационная система дальнего радиуса действия | 2022 |
|
RU2790937C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
Изобретение относится к средствам подводной навигации и может быть использовано для навигационного обеспечения автономных подводных роботов (АПР) большой дальности действия и контролируемых с борта обеспечивающего судна (ОС). Опорный гидроакустический маяк (ОГМ) выставляют за борт ОС и соединяют кабельной линией с ОС. Устанавливают стартовую точку АПР, принимаемую за начало координат. ОС перемещают в соответствии с движением АПР. На борту АПР определяют его координаты, которые затем комплексируют. ОГМ, на котором дополнительно установлен передатчик навигационных сигналов, излучает навигационный сигнал. Навигационный сигнал принимают на борту АПР, обрабатывают и объединяют с информационным сигналом. Получают оценку координат АПР по данным гидроакустической навигационной системы (ГАНС), которую комплексируют, и формируют взвешенную оценку координат АПР. Эти данные передаются с АПР по гидроакустическому каналу, принимаются ОГМ, затем передаются по кабельной линии связи на борт ОС и отображаются в реальном времени. Способ навигационного обеспечения АПР обеспечивает быструю, точную и неограниченную по дальности работу с возможностью оперативного отображения в реальном времени и географических координатах траектории движения АПР как на его борту, так и на борту ОС. 1 ил.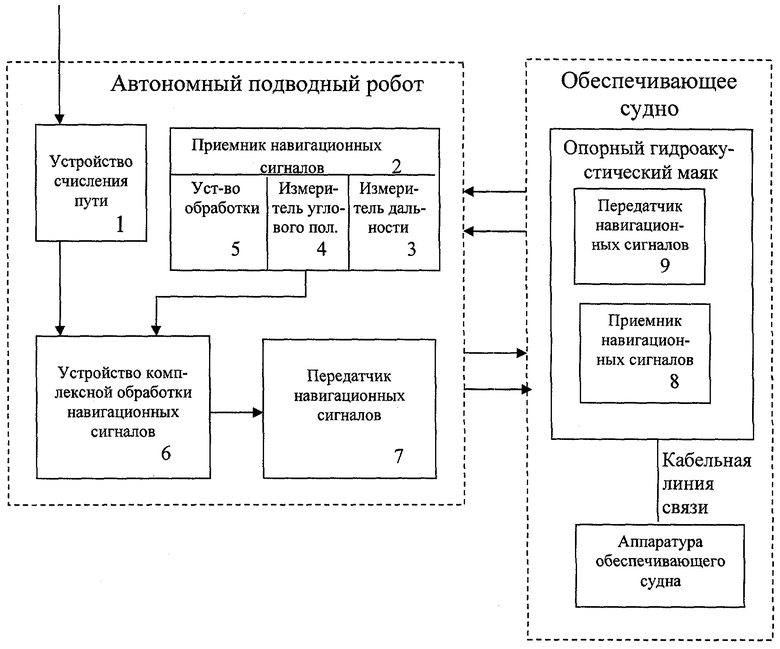
Способ навигационного обеспечения автономного подводного робота, контролируемого с борта обеспечивающего судна, при котором на борту автономного подводного робота устанавливают координаты его стартовой точки, счисляют траекторию его движения по данным датчиков скорости, курса и глубины, принимают навигационные сигналы, излучаемые опорным гидроакустическим маяком с известными координатами, определяют собственные координаты автономного подводного робота относительно опорного гидроакустического маяка путем измерения его дальности и углового положения, полученные координатные данные комплексно обрабатывают, получают оценку координат автономного подводного робота на его борту, передают ее по гидроакустическому каналу на борт обеспечивающего судна и отображают на борту судна траекторию движения автономного подводного робота, отличающийся тем, что обеспечивающее судно перемещают в соответствии с движением автономного подводного робота вдоль его трассы, опорный гидроакустический маяк выполняют буксируемым, дополнительно на нем устанавливают приемник навигационных сигналов, соединяют кабельной линией связи с обеспечивающим судном и выставляют посредством буксирующего устройства за борт обеспечивающего судна, совмещают его движение с движением обеспечивающего судна, а на борту автономного подводного робота дополнительно устанавливают передатчик навигационных сигналов, при этом координаты стартовой точки автономного подводного робота и текущие координаты опорного гидроакустического маяка определяют средствами судовой навигации и передают по кабельной линии связи на опорный гидроакустический маяк и далее по гидроакустическому каналу на борт автономного подводного робота в составе навигационных сигналов, излучаемых опорным гидроакустическим маяком, а полученные на борту автономного подводного робота данные комплексной обработки информации, содержащие оценку его координат, в составе обратного навигационного сигнала по гидроакустическому каналу передают на опорный гидроакустический маяк, а затем по кабельной линии связи на борт обеспечивающего судна.
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| SU 1434675 A1, 20.06.1996 | |||
| ПЕЛЕНГАТОР ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ С УЛЬТРАКОРОТКОЙ БАЗОЙ | 2000 |
|
RU2179730C1 |
| ПРИЕМНАЯ МНОГОЭЛЕМЕНТНАЯ КОМПЕНСИРОВАННАЯ АНТЕННА ДЛЯ ГЛУБОКОВОДНОГО ФАЗОВОГО БАТИМЕТРИЧЕСКОГО ГИДРОЛОКАТОРА БОКОВОГО ОБЗОРА | 2002 |
|
RU2209530C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА НА ИСТОЧНИК ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2158430C2 |

