Область применения изобретения
Настоящее изобретение относится к роботизированным системам безопасности. В частности, настоящее изобретение относится к промышленному роботу, реализующему систему безопасности с помощью заданных функций безопасности.
Предпосылки создания изобретения
В промышленности широко применяют роботов, например, при сборке электронной печатной платы и для выполнения других задач автоматизированной сборки. Большая популярность современных роботов объясняется простотой их конструкции, низкой стоимостью, низкими эксплуатационными расходами, небольшой массой, высокой точностью, высокой скоростью и характеристиками совместимости.
Как правило, программирование применяемых в промышленности роботов требует специальных знаний и может быть выполнено только специалистами в данной области, которых часто называют системными интеграторами. Некоторые важные вопросы безопасности, связанные с применением многофункциональных роботов в промышленности или даже в домашних условиях, по-прежнему остаются нерешенными.
Обычная роботизированная система оснащена функцией обнаружения столкновения, которая позволяет обнаруживать столкновение робота с предметами окружающей обстановки на основании нехарактерного крутящего момента, возникающего в манипуляторной части робота. При обнаружении столкновения с помощью этой функции обнаружения столкновения выполняется управляющая операция, которая останавливает функционирование робота или иным образом уменьшает силу столкновения. Благодаря этому повреждение робота и установленных на роботе устройств, а также окружающего оборудования сводится к минимуму.
Однако при использовании функции обнаружения столкновения для обнаружения столкновения между человеком и роботом необходимо повысить чувствительность распознавания столкновения с целью обеспечения безопасности человека. Поэтому необходимо точно оценить момент трения шестерен или редукторов скорости и т. д., которые имеются в различных частях робота. При этом момент трения изменяется в зависимости от температуры наружного воздуха и рабочего состояния робота, что затрудняет оценку момента трения с высокой точностью. Таким образом, сложно точно определить столкновение между человеком и роботом на основании крутящих моментов манипуляторной части робота и предотвратить травмирование человека.
Однако когда человек непосредственно контактирует с роботом и между ними отсутствует перемещаемый объект, сила, которая возникает между человеком и роботом, не определяется. Кроме того, даже при наличии датчика усилия для определения возникающей силы между человеком и рукой робота и т. д. не представляется возможным обнаружить соприкосновение человека с участком руки робота, поскольку датчик не может обнаружить этот участок. По этой причине в предшествующем уровне техники не было возможности создать роботизированную систему, способную безопасно функционировать в интерактивном режиме при вероятности непосредственного соприкосновения человека и робота.
Для измерения изменений емкости, создаваемых датчиком в электрическом поле конденсатора в результате приближения объекта, применяли емкостные датчики. Наряду со всеми хорошо проводящими электричество материалами емкостные датчики обнаруживают только те материалы, которые имеют достаточно высокую диэлектрическую проницаемость. Емкостные датчики неприменимы в качестве устройства обеспечения безопасности в случае быстро движущихся устройств с массивными частями, которые свободно перемещаются в пространстве. В связи с этим необходимо предложить полную систему, которая предполагает безотказное взаимодействие человека и машины.
Робот представляет собой механическую машину, которая может быть потенциально опасной и может причинить вред человеку при столкновении с ней. В случае аппаратных отказов или программных ошибок робот даже может производить неожиданные движения, которые не предусмотрены системным интегратором (лицом, ответственным за безопасность при настройке робота). По этой причине для робота требуется улучшенная система безопасности.
В патенте US2010/0324733 описан робот с системой безопасности, содержащей сочленение, первый датчик крутящего момента и второй датчик крутящего момента, установленные в каждом сочленении. Датчики крутящего момента (например, тензодатчики) неприменимы для создания надежной системы безопасности. Кроме того, датчики, описанные в US2010/0324733, подключены к двум вычислительным устройствам S1, S2 в виде интегральных схем (ИС), которые имеют микроконтроллеры, в передающем устройстве S. Таким образом, согласно патенту US2010/0324733, все цепи датчика размещены не в одном и том же компоненте, что делает его менее применимым для целей обеспечения безопасности.
Задача изобретения состоит в создании устройства обеспечения безопасности функционирования устройств, которые содержат части, свободно перемещающиеся в пространстве, позволяющего обеспечить надежную и безопасную эксплуатацию таких устройств без применения сложных и дорогостоящих дополнительных устройств, а также позволяющего обеспечить надежное обнаружение столкновения между частями устройства и людьми или объектами на ранней стадии, с тем чтобы помимо исключения затрат на планирование и производство значительно сократить необходимое пространство для таких установок, чтобы в будущем люди и машины могли совместно использовать рабочие зоны.
Изложение сущности изобретения
Вышеуказанные и другие задачи в соответствии с настоящим изобретением решаются с помощью программируемой роботизированной системы, имеющей специальную систему безопасности.
В частности, одна из задач настоящего изобретения состоит в создании программируемой роботизированной системы, программирование которой можно осуществить простым и легким способом, не требующим специальных знаний, т. е. которое сможет выполнить, например, оператор или отраслевой специалист или даже частное лицо, например, в домашних условиях. В частности, в системе безопасности применяют два датчика положения в каждом сочленении робота для обеспечения требуемых функций безопасности, как будет более подробно объяснено ниже. Датчики положения применяют для определения углового или линейного положения на первичной или вторичной стороне шестерни или аналогичного передаточного устройства. В случае обнаружения какой-либо из функцией безопасности каких-либо нарушений эксплуатационных пределов или ошибок в аппаратном или программном обеспечении робот будет переведен в безопасное состояние.
В соответствии с настоящим изобретением система разработана таким образом, что никакой из сбоев в программном или аппаратном обеспечении не может привести к тому, что робот станет опасным. Стандартный способ реализации такой системы состоит в применении двух отдельных систем (вариантов) для выполнения функций безопасности. Обе эти системы могут независимо друг от друга отключать питание робота. Каждая из этих систем может контролировать требуемые параметры безопасности.
Авторы настоящего изобретения обнаружили, что размещение датчиков положения по обе стороны от шестерни представляет собой простой способ решения некоторых проблем обеспечения безопасности, связанных с промышленными роботами. Датчики располагают в сочленении робота таким образом, чтобы один датчик положения находился на первичной стороне шестерни (со стороны двигателя) и один находился на вторичной стороне шестерни (со стороны руки робота). Следует отметить, что устройство управления обрабатывает информацию от двух датчиков для реализации одной или более функций безопасности, при этом все цепи датчика размещают на одном и том же компоненте (в отличие от US2010/0324733, где для цепей датчика применяют отдельные компоненты). Система безопасности выполняет множество функций безопасности с применением двух датчиков. Каждая функция безопасности сравнивает применяемые в ней значения со вторым вариантом системы безопасности и в случае обнаружения несоответствия переводит робота в безопасное состояние. Для предотвращения сбоев из-за ошибок, связанных с безопасностью, большинство функций безопасности также ограничивают значения параметров. Они могут, например, ограничивать скорость движения руки робота, чтобы избежать нарушения механического момента. Эти функции безопасности в данном документе определены следующим образом.
Функция безопасности, ограничивающая положение сочленения
В первой системе датчик положения на вторичной стороне непосредственно контролирует угол наклона сочленения робота и устанавливает, не выходит ли его значение за границы предела, определенного настройками безопасности. Во второй системе датчик положения на первичной стороне вычисляет соответствующее положение на вторичной стороне, учитывая количество полных оборотов и передаточное отношение.
Функция безопасности, ограничивающая скорость движения сочленения
Скорость движения сочленения робота может быть аппроксимирована по изменению положения за временной интервал (численное дифференцирование). В случае применения датчиков положения с высоким разрешением и при достаточном времени измерения эта функция может быть довольно точной. Таким образом реализуют функцию безопасной скорости движения в каждом из двух вариантов системы безопасности.
Функция безопасности, ограничивающая крутящий момент сочленения
Зная положение и скорость движения каждого сочленения робота и распределение массы в руке робота, можно вычислять предполагаемый крутящий момент, развиваемый в каждом сочленении робота (на вторичной стороне). Кроме того, измеряют токи двигателя для оценки крутящего момента на сочленении со стороны двигателя (на первичной стороне). Эти две системы можно применять для проверки того, что крутящий момент находится в границах заданного предела.
Функция безопасности, ограничивающая положение рабочего инструмента
Для случаев применения двух датчиков в комбинации с программными моделями кинематики роботов для определения положения концевого эффектора руки робота и проверки того, что это положение находится в некоторых границах определенных пользователем пределов.
Функция безопасности, ограничивающая ориентацию рабочего инструмента
Для случаев применения двух датчиков в комбинации с программными моделями кинематики роботов для определения ориентации концевого эффектора руки робота и проверки того, что эта ориентация находится в некоторых границах определенных угловых пределов.
Функция безопасности, ограничивающая скорость движения рабочего инструмента
Численное дифференцирование положения может быть применено для оценки скорости движения рабочего инструмента по аналогии с функцией безопасности, ограничивающей скорость движения сочленения и функцией безопасности, ограничивающей положение рабочего инструмента.
Функция безопасности, ограничивающая усилие на рабочем инструменте
Предполагаемый крутящий момент, упомянутый в описании функции безопасности, ограничивающей крутящий момент сочленения, может быть спроецирован в декартову систему координат для реализации функции ограничения усилия.
Функция безопасности, ограничивающая механический момент
На основании положения и скорости движения сочленений робота можно вычислять и ограничивать механический момент робота и полезную нагрузку в любой заданный момент времени с применением модели распределения массы в руке робота и полезной нагрузки.
Функция безопасности, обеспечивающая экстренную остановку
При нажатии кнопки аварийной остановки применяют избыточное измерение скорости движения для проверки того, что робот действительно замедляется, в результате чего скорость движения робота интенсивно уменьшается отказобезопасным способом в рамках запрограммированной траектории.
Функция безопасности, обеспечивающая гарантированную остановку
Оценку скорости движения также можно применять для управления торможением и обеспечения избыточного торможения робота, когда активен вход гарантированной остановки.
Функция безопасности, контролирующая предельное значение мощности
Уменьшение крутящего момента, создаваемого сочленениями, в зависимости от скорости движения сочленений применяют для проверки того, что полная механическая работа, выполняемая роботом, находится в границах определенного предела.
Функция безопасности, устанавливающая состояние цифрового выхода движения робота
Каждый из двух датчиков может обнаруживать, движутся ли сочленения робота, и соответственно устанавливать выход.
Функция безопасности, устанавливающая состояние цифрового выхода «робот не останавливается»
Каждый из двух датчиков в комбинации с потреблением тока в сочленениях может определять состояние, когда робот не осуществляет интенсивное торможение или остановку, и соответственно устанавливать выход.
Функция безопасности, контролирующая зону режима с ограничением
Два датчика можно применять для контроля того, что робот находится в своем рабочем пространстве, и соответственного изменения параметров безопасности. Например, робот движется быстрее внутри станка с ЧПУ, чем снаружи, поскольку внутри станка с ЧПУ риск столкновения с человеком гораздо меньше.
Функцию безопасности, связанную с рабочим инструментом, рассматривают применительно к точке на рабочем инструменте, например TCP (главной точке рабочего инструмента), или точке на фланце робота.
Соответственно, первый аспект настоящего изобретения включает промышленного робота, имеющего систему безопасности, содержащую:
- сочленение, соединяющее две секции руки робота и оснащенное шестерней или аналогичным передаточным устройством для передачи усилия или крутящего момента от одной секции руки к другой;
- первый датчик положения для определения положения на первичной стороне передаточного механизма;
- второй датчик положения для определения положения на вторичной стороне передаточного механизма;
- устройство управления для реализации программной модели механической руки робота, которая включает кинематические и динамические вычисления;
- средства пользовательского интерфейса, содержащие средства для программирования робота, причем указанные средства пользовательского интерфейса предусмотрены либо вне робота, либо в виде неотъемлемой части робота, либо в виде комбинации указанных вариантов;
- средства хранения, взаимодействующие с указанными средствами пользовательского интерфейса и указанным устройством управления, для хранения информации, связанной с движением робота и его дополнительными операциями;
- причем устройство управления обрабатывает информацию от двух датчиков положения для реализации одной или более функций безопасности, например, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18 или 19 из следующих функций безопасности:
- функция безопасности, ограничивающая положение сочленения, где второй датчик положения непосредственно контролирует угол наклона сочленения робота и определяет, выходит ли его значение за границы заданного диапазона углов, а первый датчик положения вычисляет соответствующее положение на вторичной стороне на основании количества полных оборотов и передаточного отношения;
- функция безопасности, ограничивающая скорость движения сочленения, где скорость движения сочленения робота определяют по изменению положения за временной интервал;
- функция безопасности, ограничивающая крутящий момент сочленения, где положение и скорость движения сочленения робота в сочетании с распределением массы в руке робота применяют для вычисления предполагаемого крутящего момента, развиваемого в сочленении робота;
- функция безопасности, ограничивающая скорость движения рабочего инструмента, где для оценки скорости движения рабочего инструмента применяют численное дифференцирование положения;
функция безопасности, ограничивающая усилие на рабочем инструменте, где предполагаемый крутящий момент, вычисленный с помощью указанной функции безопасности, ограничивающей крутящий момент сочленения, может быть спроецирован в декартову систему координат для получения функции ограничения усилия;
- функция безопасности, ограничивающая механический момент, где на основании положения и скорости движения сочленений робота можно вычислять и ограничивать механический момент робота и полезную нагрузку в любой заданный момент времени с применением модели распределения массы в руке робота и полезной нагрузки;
- функция безопасности, обеспечивающая экстренную остановку, где при активации аварийной остановки применяют избыточное измерение скорости движения для проверки того, что робот действительно замедляется, в результате чего скорость движения робота интенсивно уменьшается отказобезопасным способом в рамках запрограммированной траектории;
- функция безопасности, обеспечивающая гарантированную остановку, где оценку скорости движения с помощью двух датчиков применяют для управления избыточным торможением робота, когда активен вход гарантированной остановки;
- функция безопасности, контролирующая предельное значение мощности, где положение и скорость движения сочленений робота в сочетании с моделями кинематики и динамики руки непрерывно контролируют, находится ли значение полной механической работы, выполняемой рукой робота, в границах определенного предела;
- функция безопасности, устанавливающая состояние цифрового выхода движения робота, где каждый из двух датчиков определяет, движутся ли сочленения робота, и соответственно устанавливает выход;
- функция безопасности, устанавливающая состояние цифрового выхода «робот не останавливается», где каждый из двух датчиков определяет состояние, когда робот не осуществляет интенсивное торможение или остановку, и соответственно устанавливает выход;
- функция безопасности, контролирующая зону режима с ограничением, где два датчика применяются для контроля того, находится ли робот в своем рабочем пространстве, и соответственно изменяют параметры безопасности;
- функция безопасности, ограничивающая положение рабочего инструмента, где два датчика применяют в комбинации с программными моделями кинематики роботов для вычисления положения концевого эффектора руки робота и проверки того, что это положение находится в некоторых границах определенных пользователем пределов; и
- функция безопасности, ограничивающая ориентацию рабочего инструмента, где два датчика применяют в комбинации с программными моделями кинематики роботов для вычисления ориентации концевого эффектора руки робота и проверки того, что эта ориентация находится в некоторых границах определенных угловых пределов.
В предпочтительном варианте осуществления настоящего изобретения датчики определяют угловое или линейное положение. Предпочтительно первый датчик положения определяет положение на первичной стороне шестерни, а второй датчик положения определяет положение на вторичной стороне шестерни.
В предпочтительном варианте осуществления настоящего изобретения устройство управления применяет информацию от двух датчиков для реализации по меньшей мере следующих функций безопасности:
- функция безопасности, ограничивающая положение сочленения;
- функция безопасности, ограничивающая скорость движения сочленения; и
- функция безопасности, ограничивающая крутящий момент сочленения.
В другом аспекте настоящего изобретения предложен способ обеспечения безопасности промышленного робота, который позволяет осуществлять вышеуказанные функции безопасности.
Краткое описание чертежей
На фиг. 1 представлен вид в поперечном разрезе сочленения робота в соответствии с вариантом осуществления настоящего изобретения.
Подробное описание изобретения
В соответствии с настоящим изобретением система разработана таким образом, что никакой из сбоев в программном или аппаратном обеспечении не может привести к тому, что робот станет опасным.
Стандартный способ реализации такой системы состоит в применении двух отдельных систем для выполнения функций безопасности. Обе эти системы могут независимо друг от друга отключать питание робота. Каждая из этих систем может контролировать требуемые параметры безопасности. Для предотвращения отказов по общей причине эти две системы должны быть максимально разнотипными. Эти отказы могут быть вызваны ошибками компилятора, ошибками способа, некорректной работой программного обеспечения, сбоями электронных устройств. Чтобы решить эту проблему, две независимые группы программистов разрабатывают два варианта программного обеспечения системы безопасности, исходный код которых компилируют различные компиляторы и которые выполняют на разных микропроцессорах. Измерение угловых положений в этих двух вариантах осуществляют с применением различных аппаратных средств, а в случае отказа применяют два различных способа отключения источника питания.
Поскольку для обеспечения требуемых определенных выше функций безопасности в системе безопасности в каждом сочленении робота применяют два датчика, ниже приведено более подробное описание такого модифицированного сочленения робота.
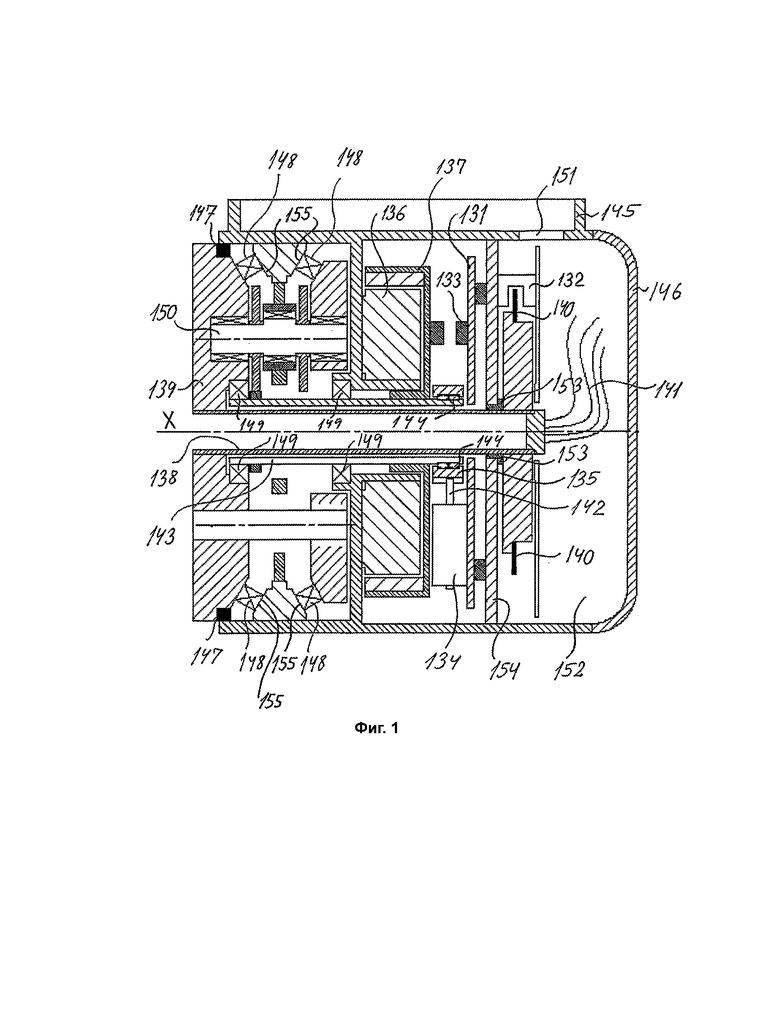
На фиг. 1 представлен вид в поперечном разрезе сочленения в соответствии с вариантом осуществления настоящего изобретения. Это сочленение содержит механические, электромеханические, электронные и оптические элементы, которые взаимосвязаны между собой, т. е. элементы соединены с другими элементами либо непосредственно через электрические разъемы, либо через беспроводное, например оптическое, соединение. Для выполнения наиболее простого и эффективного монтажа и соединения этих элементов предпочтительно, чтобы как можно большее количество этих элементов находилось на одной печатной плате 131 (ПП). Вид в поперечном разрезе изображает вариант осуществления сочленения, которое может быть применено в шестикоординатных роботах, но следует понимать, что это сочленение также может быть применено в других роботах.
В показанном варианте осуществления применены датчики 132, 133 положения и реализован предохранительный тормоз 134, 135. Этот тормоз выполнен таким образом, что соленоид 134 может активировать и деактивировать тормоз с помощью очень ограниченного усилия.
Датчик 133, применяемый для определения положения (угловой ориентации вала/ротора) двигателя (угловой ориентации), устанавливают на задней поверхности ПП 131. Двигатель, показанный на фиг. 1, содержит статорную часть 136 и роторную часть 137.
Датчик 132, применяемый для определения угловой ориентации выходного вала 138 или выходного фланца 139 сочленения, устанавливают на передней поверхности ПП или в гнездо на передней поверхности ПП 131. Предпочтительно применяют датчик с высоким разрешением, а между полым валом 138 и датчиком важно выдержать небольшое расстояние для возможности правильного позиционирования датчика и диска устройства кодирования относительно друг друга. Для возможности определения перемещения (поворота) выходного фланца 139 на ПП 131 сочленения диск 140 устройства кодирования устанавливают на полый вал 138, через который прокладывают электрические и пневматические соединения 141 сочленения, а полый вал 138 соединяют с выходным фланцем 139.
Предохранительный тормоз 134 и 135, который останавливает робота 137, например, при сбое в подаче электроэнергии, формируют как неотъемлемую часть ПП 131. Соленоид 134, который в случае сбоя в подаче электроэнергии смещает храповик 142 в зацепление с кольцевым элементом 135, установленным на вал 143 двигателя, устанавливают непосредственно на ПП 131. Этот кольцевой элемент 135 (фрикционное кольцо) может поворачиваться относительно вала двигателя, но между кольцевым элементом и валом 143 двигателя существует сильное трение. Это позволяет осуществлять управляемую остановку сочленения, но остановка сочленения происходит не настолько внезапно, чтобы рука робота могла быть перегружена. Согласно фигуре, трение между кольцевым элементом 135 и валом 143 двигателя обеспечивают с помощью уплотнительных колец 144, плотно установленных между валом 143 двигателя и кольцевым элементом 135 (фрикционным кольцом).
Кроме того, сочленение согласно данному варианту осуществления изобретения выполнено таким образом, что смежные сочленения можно прикреплять друг к другу без применения дополнительных элементов. Прикрепление сочленения к смежному сочленению или соединительному элементу (например, тонкостенной трубке) выполняют с помощью выходного фланца 139 и соединительной части 145 на корпусе 146 сочленения. Помимо этого, сочленения робота в соответствии с настоящим изобретением могут быть соединены друг с другом с помощью соответствующих элементов, например тонкостенных трубок, которые являются предпочтительным выбором благодаря оптимальному соотношению жесткости/массы. Кроме того, сочленение в соответствии с данным вариантом осуществления изобретения содержит уплотнение 147 между корпусом 146 и выходным фланцем 139, коренные подшипники 148, которые опираются на наклонные части 155 внутренней поверхности (опорные поверхности), предусмотренные в корпусе 146, герметизированные подшипники 149, передаточный механизм 150, по меньшей мере один канал 151 для соединения со смежным сочленением или соединительным элементом, область/пространство (152) для контактного кольца и скрученных проводов 141 при повороте выходных элементов 138, 139, дополнительные подшипники 153 и пластину 154, например, из алюминия или другого подходящего материала, для монтажа ПП 131, а также для выполнения функции радиатора для силовой электроники сочленения.
Вместо пары радиально-упорных игольчатых подшипников, показанных на фигуре в качестве коренного подшипникового узла в сочленении, может быть применен один шариковый подшипник с четырехточечным контактом или один перекрестный роликовый подшипник, или пара радиально-упорных шариковых подшипников.
Кроме того, вместо показанной эксцентриковой зубчатой передачи с одной эксцентриковой шестерней может быть применена эксцентриковая зубчатая передача с двумя шестернями, сдвинутыми по фазе на 180 градусов, или с тремя шестернями, сдвинутыми по фазе на 120 градусов. Альтернативно в устройстве может быть применена волновая зубчатая передача со встроенным подшипником вторичного вала или без него.
Хотя выше показано и описано некоторое количество конкретных вариантов осуществления, следует понимать, что настоящее изобретение, как и самого робота, средства пользовательского интерфейса, применяемые для программирования и управления роботом, и саму по себе полную систему управления можно реализовать множеством различных способов. Таким образом, например, могут быть предложены многочисленные альтернативные страницы меню в пользовательском интерфейсе. Объем настоящего изобретения, таким образом, определяет прилагаемая формула изобретения и ее технические эквиваленты. Кроме того, предполагается, что средства пользовательского интерфейса по настоящему изобретению также могут быть применены в отношении других роботов, отличных от показанного, описанного и заявленного в настоящей заявке, и что это также относится и к электромеханическим элементам робота, например сочленениям с приводными механизмами, устройствам кодирования и т. д.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ МЕЖДУ МЕХАНИЧЕСКИМИ РУКАМИ И МЕДИЦИНСКИЙ РОБОТ | 2019 |
|
RU2777566C1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| СПОСОБ, УСТРОЙСТВО И УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ САМОАДАПТИВНОЙ КОМПЕНСАЦИИ СИЛЫ ТЯЖЕСТИ МАНИПУЛЯТОРА C НЕСКОЛЬКИМИ НАГРУЗКАМИ | 2020 |
|
RU2813435C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| ОЦЕНКА УСИЛИЯ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА | 2007 |
|
RU2462342C2 |
| Способ и система для определения по меньшей мере одного свойства манипулятора | 2014 |
|
RU2672654C2 |
| Способ и система определения по меньшей мере одной характеристики сочленения | 2013 |
|
RU2667938C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2012 |
|
RU2518806C2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
Изобретение относится к системе безопасности для промышленного робота, в частности к промышленному роботу и способу реализации системы безопасности с помощью заданных функций безопасности. Для выполнения таких функций безопасности робот содержит в сочленении, соединяющем две секции руки робота, первый датчик (132) положения для определения угловой ориентации на первичной стороне шестерни в сочленении и второй датчик (133) положения для определения угловой ориентации на вторичной стороне шестерни. Изобретение обеспечивает надежную и безопасную эксплуатацию, а также надежное обнаружение столкновения между частями устройства и людьми или объектами на ранней стадии. 2 н. и 11 з.п. ф-лы, 1 ил.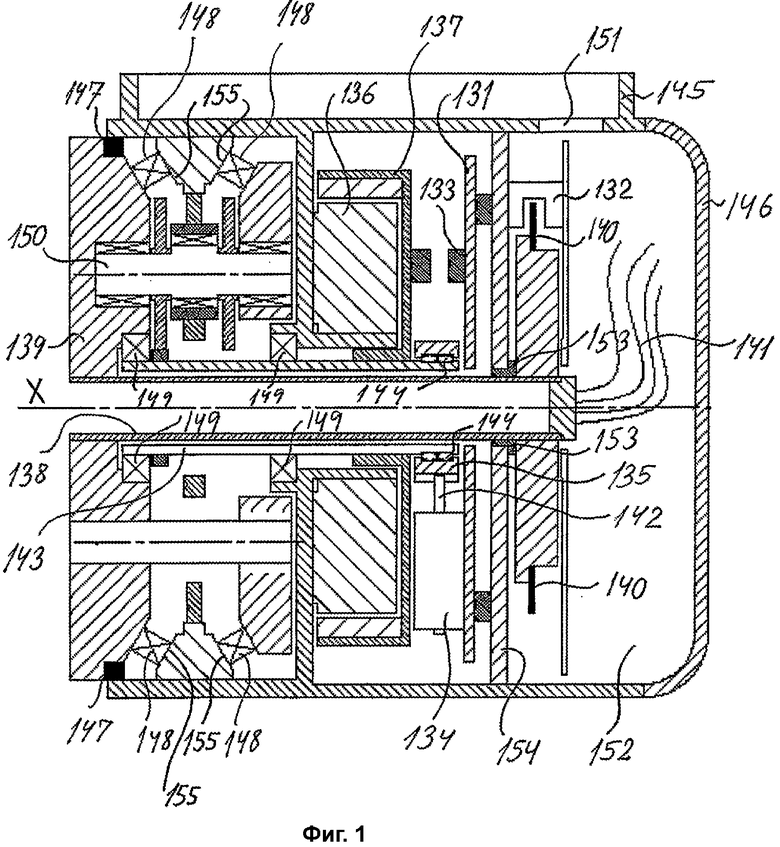
1. Промышленный робот, имеющий систему безопасности, содержащую: сочленение, соединяющее две секции руки робота и оснащенное шестерней или аналогичным передаточным устройством для передачи усилия или крутящего момента от одной секции руки к другой;
первый датчик положения для определения положения на первичной стороне передаточного механизма;
второй датчик положения для определения положения на вторичной стороне передаточного механизма;
устройство управления для реализации программной модели механической руки робота, которая включает кинематические и динамические вычисления;
средства пользовательского интерфейса, содержащие средства для программирования робота, причем указанные средства пользовательского интерфейса предусмотрены либо вне робота, либо в виде неотъемлемой части робота, либо в виде комбинации указанных вариантов;
средства хранения, взаимодействующие с указанными средствами пользовательского интерфейса и указанным устройством управления, для хранения информации, связанной с движением робота и его дополнительными операциями;
причем устройство управления обрабатывает информацию от двух датчиков для реализации функции безопасности.
2. Промышленный робот по п. 1, в котором устройство управления обрабатывает информацию от двух датчиков для реализации одной или более, например 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12 или 13, из следующих функций безопасности:
- функция безопасности, ограничивающая положение сочленения, при которой второй датчик положения непосредственно контролирует угол наклона сочленения робота и определяет, выходит ли его значение за границы заданного диапазона углов, а первый датчик положения определяет соответствующее положение на вторичной стороне на основании количества полных оборотов и передаточного отношения;
- функция безопасности, ограничивающая скорость движения сочленения, при которой скорость движения сочленения робота определяют по скорости изменения положения;
- функция безопасности, ограничивающая крутящий момент сочленения, при которой положение и скорость движения сочленения робота в сочетании с распределением массы в руке робота и модель трения применяют для вычисления предполагаемого крутящего момента, развиваемого в сочленении робота;
- функция безопасности, ограничивающая усилие на рабочем инструменте, при которой предполагаемый крутящий момент, вычисленный с помощью указанной функции безопасности, ограничивающей крутящий момент сочленения, может быть спроецирован в декартову систему координат для получения функции ограничения усилия;
- функция безопасности, контролирующая предельное значение мощности, при которой механическая работа, вычисленная как произведение крутящего момента на скорость для каждого сочленения, ограничена определенным значением;
- функция безопасности, обеспечивающая экстренную остановку, при которой при активации аварийной остановки применяют избыточное измерение скорости движения для проверки того, что робот действительно замедляется, в результате чего скорость движения робота интенсивно уменьшается отказобезопасным способом в рамках запрограммированной траектории;
- функция безопасности, обеспечивающая гарантированную остановку, при которой оценку скорости движения применяют для управления торможением робота, когда активен вход гарантированной остановки;
- функция безопасности, контролирующая предельное значение мощности, при которой положение и скорость движения сочленений робота в сочетании с моделями кинематики и динамики руки непрерывно контролируют, находится ли значение полной мощности, подведенной к руке робота, в границах определенного предела;
- функция безопасности, устанавливающая состояние цифрового выхода движения робота, при которой каждый из двух датчиков определяет, движутся ли сочленения робота, и соответственно устанавливает выход;
- функция безопасности, устанавливающая состояние цифрового выхода «робот не останавливается», при которой каждый из двух датчиков определяет состояние, когда робот не осуществляет интенсивное торможение или остановку;
- функция безопасности, контролирующая зону режима с ограничением, при которой два датчика применяются для контроля того, находится ли робот в своем рабочем пространстве, и соответственно изменяют параметры безопасности;
- функция безопасности, ограничивающая положение рабочего инструмента, при которой два датчика применяют в комбинации с программными моделями кинематики роботов для вычисления положения концевого эффектора руки робота и проверки того, что это положение находится в некоторых границах определенных пользователем пределов; и
- функция безопасности, ограничивающая ориентацию рабочего инструмента, при которой два датчика применяют в комбинации с программными моделями кинематики роботов для вычисления ориентации концевого эффектора руки робота и проверки того, что эта ориентация находится в некоторых границах определенных угловых пределов.
3. Промышленный робот по п. 1 или 2, в котором первый датчик положения представляет собой устройство кодирования или другой датчик для определения углового или линейного положения.
4. Промышленный робот по любому из пп. 1-3, в котором второй датчик положения представляет собой устройство кодирования или другой датчик для определения углового или линейного положения.
5. Промышленный робот по любому из пп. 1-4, в котором указанная рука робота выполнена с возможностью удержания рабочего инструмента робота.
6. Промышленный робот по любому из пп. 1-5, имеющий два варианта системы безопасности, каждая из которых использует соответствующий датчик из числа первого датчика положения и второго датчика положения.
7. Способ контроля параметров безопасности эксплуатации промышленного робота, имеющего сочленение, соединяющее две секции руки робота и оснащенное шестерней для передачи усилия или крутящего момента от одной секции руки к другой, первый датчик положения для определения положения на первичной стороне шестерни, второй датчик положения для определения положения на вторичной стороне шестерни, устройство управления для реализации программной модели механической руки робота, которая включает кинематические и динамические вычисления, средства пользовательского интерфейса, содержащие средства для программирования робота, причем указанные средства пользовательского интерфейса предусмотрены либо вне робота, либо в виде неотъемлемой части робота, либо в виде комбинации указанных вариантов, и средства хранения, взаимодействующие с указанными средствами пользовательского интерфейса и указанным устройством управления, для хранения информации, связанной с движением робота и его дополнительными операциями,
отличающийся тем, что применяют устройство управления для обработки информации от двух датчиков для реализации функции безопасности.
8. Способ по п. 7, в котором устройство управления обрабатывает информацию от двух датчиков для реализации одной или более, например 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14 или 15, из следующих функций безопасности:
- функция безопасности, ограничивающая положение сочленения, при которой второй датчик положения непосредственно контролирует угол наклона сочленения робота и определяет, выходит ли его значение за границы заданного диапазона углов, а первый датчик положения определяет соответствующее положение на вторичной стороне на основании количества полных оборотов и передаточного отношения;
- функция безопасности, ограничивающая скорость движения сочленения, при которой скорость движения сочленения робота определяют по скорости изменения положения;
- функция безопасности, ограничивающая крутящий момент сочленения, при которой положение и скорость движения сочленения робота в сочетании с распределением массы в руке робота и модель трения применяют для вычисления предполагаемого крутящего момента, развиваемого в сочленении робота;
- функция безопасности, ограничивающая скорость движения рабочего инструмента, при которой скорость движения рабочего инструмента вычисляют на основании выходного сигнала от датчиков положения;
- функция безопасности, ограничивающая усилие на рабочем инструменте, при которой предполагаемый крутящий момент, вычисленный с помощью указанной функции безопасности, ограничивающей крутящий момент сочленения, может быть спроецирован в декартову систему координат для получения функции ограничения усилия;
- функция безопасности, ограничивающая механический момент, при которой на основании положения и скорости движения сочленений робота можно вычислять и ограничивать механический момент робота и полезную нагрузку в любой заданный момент времени с применением модели распределения массы в руке робота и полезной нагрузки;
- функция безопасности, контролирующая предельное значение мощности, при которой механическая работа, вычисленная как произведение крутящего момента на скорость для каждого сочленения, ограничена определенным значением;
- функция безопасности, обеспечивающая экстренную остановку, при которой при активации аварийной остановки применяют избыточное измерение скорости движения для проверки того, что робот действительно замедляется, в результате чего скорость движения робота интенсивно уменьшается отказобезопасным способом в рамках запрограммированной траектории;
- функция безопасности, обеспечивающая гарантированную остановку, при которой оценку скорости движения применяют для управления торможением робота, когда активен вход гарантированной остановки;
- функция безопасности, контролирующая предельное значение мощности, при которой положение и скорость движения сочленений робота в сочетании с моделями кинематики и динамики руки непрерывно контролируют, находится ли значение полной мощности, подведенной к руке робота, в границах определенного предела;
- функция безопасности, устанавливающая состояние цифрового выхода движения робота, при которой каждый из двух датчиков определяет, движутся ли сочленения робота, и соответственно устанавливает выход;
- функция безопасности, устанавливающая состояние цифрового выхода «робот не останавливается», при которой каждый из двух датчиков определяет состояние, когда робот не осуществляет интенсивное торможение или остановку;
- функция безопасности, контролирующая зону режима с ограничением, при которой два датчика применяются для контроля того, находится ли робот в своем рабочем пространстве, и соответственно изменяют параметры безопасности;
- функция безопасности, ограничивающая положение рабочего инструмента, при которой два датчика применяют в комбинации с программными моделями кинематики роботов для вычисления положения концевого эффектора руки робота и проверки того, что это положение находится в некоторых границах определенных пользователем пределов; и
- функция безопасности, ограничивающая ориентацию рабочего инструмента, при которой два датчика применяют в комбинации с программными моделями кинематики роботов для вычисления ориентации концевого эффектора руки робота и проверки того, что эта ориентация находится в некоторых границах определенных угловых пределов.
9. Способ по п. 7 или 8, в котором первый датчик положения определяет угловое или линейное положение.
10. Способ по любому из пп. 7-9, в котором второй датчик положения определяет угловое или линейное положение.
11. Способ по любому из пп. 7-10, в котором устройство управления применяет или обрабатывает информацию от двух датчиков для реализации по меньшей мере следующих функций безопасности:
функция безопасности, ограничивающая положение сочленения;
функция безопасности, ограничивающая скорость движения сочленения; и
функция безопасности, ограничивающая крутящий момент сочленения.
12. Способ по любому из пп. 7-11, в котором устройство управления применяет или обрабатывает информацию от двух датчиков для реализации следующих функций безопасности:
функция безопасности, ограничивающая положение сочленения;
функция безопасности, ограничивающая скорость движения сочленения;
функция безопасности, ограничивающая крутящий момент сочленения; и
функция безопасности, ограничивающая усилие на рабочем инструменте.
13. Способ по любому из пп. 7-12, в котором промышленный робот имеет два варианта системы безопасности, каждая из которых использует соответствующий датчик из числа первого датчика положения и второго датчика положения.
| WO 2013175553 A1, 28.11.2013 | |||
| US 20100324733 A1, 23.12.2010 | |||
| US 4676002 A1, 30.06.1987 | |||
| РОБОТИЗИРОВАННАЯ СИСТЕМА ВЗАИМОДЕЙСТВИЯ | 2009 |
|
RU2479414C2 |

