Изобретение относится к области вибрационной техники и может быть использовано при модернизации вибрационных технологических машин.
Вибрационные машины в виде технологических стендов находят широкое применение в различных отраслях промышленного производства. Динамика машин такого рода отличается разнообразием рабочих состояний, формой взаимодействия внешних элементов и повышенными нагрузками.
Вибрационный фон, сопровождающий работу вибростендов, нуждается в оценке и настройках на уровни и формы воздействия, что определяется требованиями обеспечения качества выпускаемой продукции, нормированием вибрационных воздействий для обслуживающего персонала и динамических нагрузок на производственные помещения.
Многие вопросы обеспечения динамических состояний вибрационных технологических машин рассматриваются в специальной литературе [1-3]. Особенность работы вибрационных стендов, также как и других машин, работающих в условиях интенсивных динамических нагружений, заключается в необходимости достаточно детализированного внимания к задачам оценки, контроля и изменения динамических состояний, требуемых технологическим регламентам.
Известны конструктивно-технические решения, обеспечивающие возможности соответствующих настроек распределений амплитуд колебаний точек рабочего органа по его длине, формирование определенных по структуре и параметрам вибрационных полей.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известно изобретение [Мацеевич Б.В., Михайлов В.Д., Савченко В.П., Феофанов В.М., Янбулатов Р.И., Голиков Н.А. «Вибрационная машина для предпосевной обработки семян», патент №2130417, МПК B65G 27/00, B65G 27/18, приоритет 20.05.1999], представляющее собой квазиударную вибрационную раму, содержащую основание, приемную раму, установленную на упругих подвесках основания, и вибропобудитель приемной рамы. В устройство введена упругая балка, закрепленная одним своим концом к основанию параллельно упругим подвескам. Свободный конец упругой балки соединен с жесткими на растяжение и неустойчивыми на сжатие минимум двумя звеньями, направленными в одну из сторон колебательного движения приемной рамы. Свободный конец одного из звеньев закреплен к раме, а другого - к основанию. Технический эффект - повышение КПД технологического оборудования.
Недостатками данного изобретения являются отсутствие средств для перемещения вибровозбудителя и отсутствие устройств для регулирования динамического состояния вибрационной машины.
Известно устройство для гашения колебаний [Елисеев С.В., Ермошенко Ю.В., Московских А.О., Большаков Р.С.«Устройство для гашения колебаний», патент №2498126 С2, МПК F16F 7/112, F16F 15/027 приоритет 10.11.2013], содержащее упругие элементы и систему динамического гашения колебаний в виде упруго присоединенной массы. Объект защиты содержит настраиваемую систему динамического гашения колебаний. Система динамического гашения содержит пневмобаллон с клапаном, компрессор с трубопроводом и систему управления с датчиками. Пневмобаллон закреплен на опорной плите, перемещающейся в соединении типа «ласточкин хвост» при помощи самотормозящегося винтового устройства. Датчики установлены на объекте защиты и на динамическом гасителе колебаний и передают информацию о состоянии объекта защиты и динамического гасителя в блок обработки информации для принятия решения о включении компрессора и винтового устройства. Достигается динамическое гашение колебаний по двум координатам.
Рассмотренное изобретение имеет ряд недостатков, к которым можно отнести отсутствие в системе управления функций для получения режима единичного соотношения между координатами движения.
Известно изобретение [Серга Г.В., Резниченко С.М. «Вибрационная машина для предпосевной обработки семян», патент №2585476, МПК А01С 1/00, приоритет 30.12.2014], содержащее шлифовальный барабан, внутренняя поверхность которого покрыта слоем резины, с разгрузочным окном, рабочий орган, бункер-дозатор, выгрузной лоток, установленные упруго на основании. Шлифовальный барабан выполнен коническим, многозаходным, винтовым и смонтирован из направляющих элементов, выполненных из трех и более скрученных по винтовой линии в продольном направлении относительно продольной оси и изогнутых по винтовой линии в поперечном направлении на оправке в виде параболоида вращения полос, выполненных с боковыми кромками выпуклой криволинейной формы, с напусками и описанных кривыми различного порядка и степени кривизны. При этом по всей длине внутри шлифовального барабана образованы напуски в виде винтовых лопастей, причем по всей длине шлифовального барабана смонтирована коническая пружина с плоским сечением витков и с устройством для изменения шага витков путем растяжения или сжатия пружины. Упрощенная конструкция устройства позволяет расширить его технологические возможности.
К недостаткам данного технического решения можно отнести отсутствие автоматического регулирования динамического состояния.
За прототип принимается устройство [Антипов В.И., Антипова Р.И., Кошелев А.В., Денцов Н.Н. «Вибрационная транспортирующая машина», патент №2532235, МПК В06В 1/00 приоритет 10.07.2012], которое включает рабочий орган, соединенный упругой связью с реактивной частью, несущей средство для сообщения резонансных однонаправленных колебаний, и амортизаторы малой жесткости, причем средство для сообщения резонансных однонаправленных колебаний выполнено в виде смонтированных на реактивной части машины, по меньшей мере, пары одинаковых параметрических вибровозбудителей, установленных с возможностью вращения роторов инерционных элементов в противоположных направлениях в вертикальных плоскостях и приводимых во вращение от независимых электродвигателей, а резонансная частота средства для сообщения резонансных однонаправленных колебаний определяется из соотношений ω=λ1+λ2, λ1=v⋅ω, 0<v<1, где ω - усредненное значение парциальных угловых скоростей роторов, λ1 - эффективная собственная частота качающихся маятников роторов инерционных элементов, λ2=√(С/Мпр) - парциальная собственная частота рабочего органа, соответствующая противофазной форме однонаправленных свободных колебаний, Мпр=M1M2/(M1+M2) - приведенная масса, С - жесткость упругой связи, M1 - масса рабочего органа, М2 - общая масса реактивной части машины. Технический результат - достижение высокой стабильности резонансного режима работы машины при высокой добротности ее колебательной системы, а в итоге создание энергосберегающих вибрационных транспортирующих машин.
Недостатками данного изобретения являются отсутствие средств изменения положения вибровозбудителя, что не дает возможности осуществления контроля динамического состояния вибрационной технологической машины, а также получения режима единичного соотношения между координатами движения вибрационной технологической машины.
Задачей изобретения является формирование динамического состояния вибрационной технологической машины при помощи изменения положения вибровозбудителя, опирающегося на упругую опору.
Способ коррекции динамического состояния технологической машины, включающий возбуждение вибраций рабочего органа, отличающийся тем, что измеряют колебания, регулируют соотношение амплитуд колебаний в разных точках рабочего органа и влияние силовых воздействий на крайние точки рабочего органа путем передвижения регулируемого вибровозбудителя вдоль поверхности вибрационной технологической машины.
Устройство для коррекции динамического состояния технологических машин включает: рабочий орган, опирающийся на опорные упругие элементы, вибровозбудитель, создающий вибрационное поле, отличающийся тем, что вибровозбудитель имеет возможность перемещения в по поверхности рабочего органа продольном направлении и опирается на пневмобаллон с регулируемой жесткостью, что обеспечивает возможности изменения динамического состояния технологической машины, меняя структуры вибрационного поля за счет изменения положения точки приложения силы и величины изменения упругих сил взаимодействия на основании информации, полученной от датчиков динамического состояния, расположенных по краям рабочего органа.
Сущность изобретения поясняется чертежами
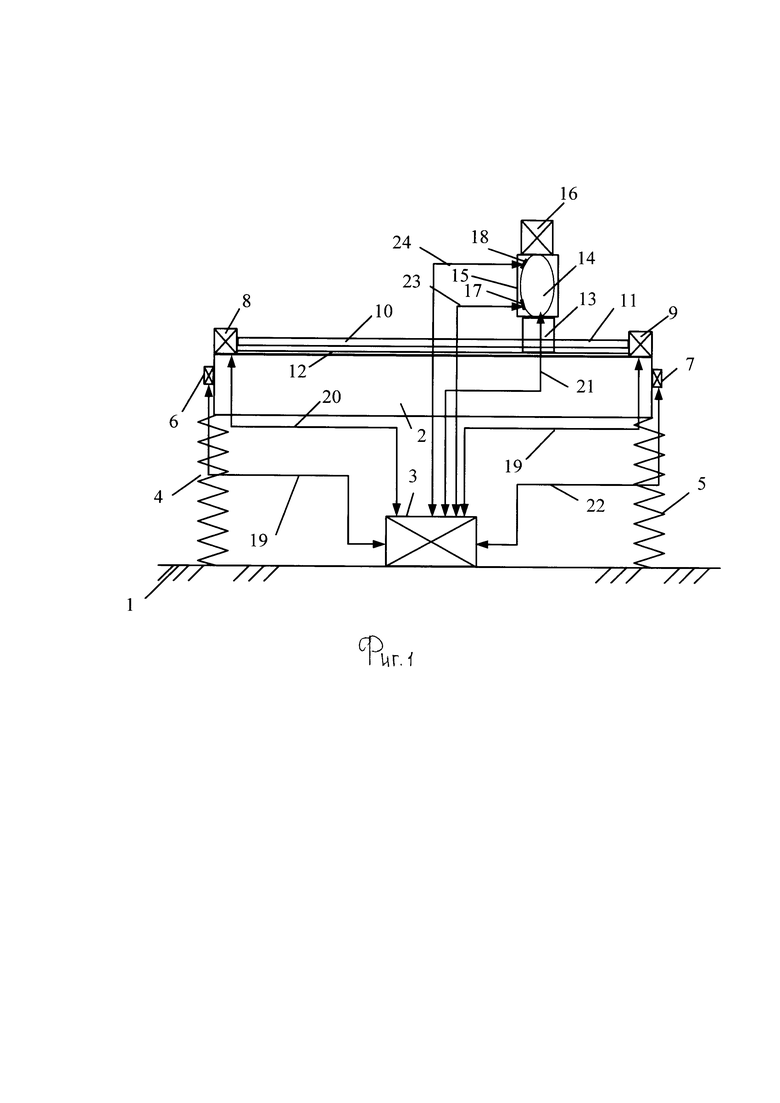
На фиг. 1 показана принципиальная схема вибрационной технологической машины с устройствами настройки динамического состояния, содержащая опорную поверхность 1, рабочий орган 2, блок управления 3, упругие элементы 4, 5, датчики 6, 7, электрические сервоприводы 8, 9, ходовые винты 10, 11, направляющие 12, опорный элемент 13, пневмобаллон 14, ограничитель 15, вибровозбудитель 16, дроссель 17, клапан 18, коммуникационные связи 19, 20, 21, 22, 23, 24.
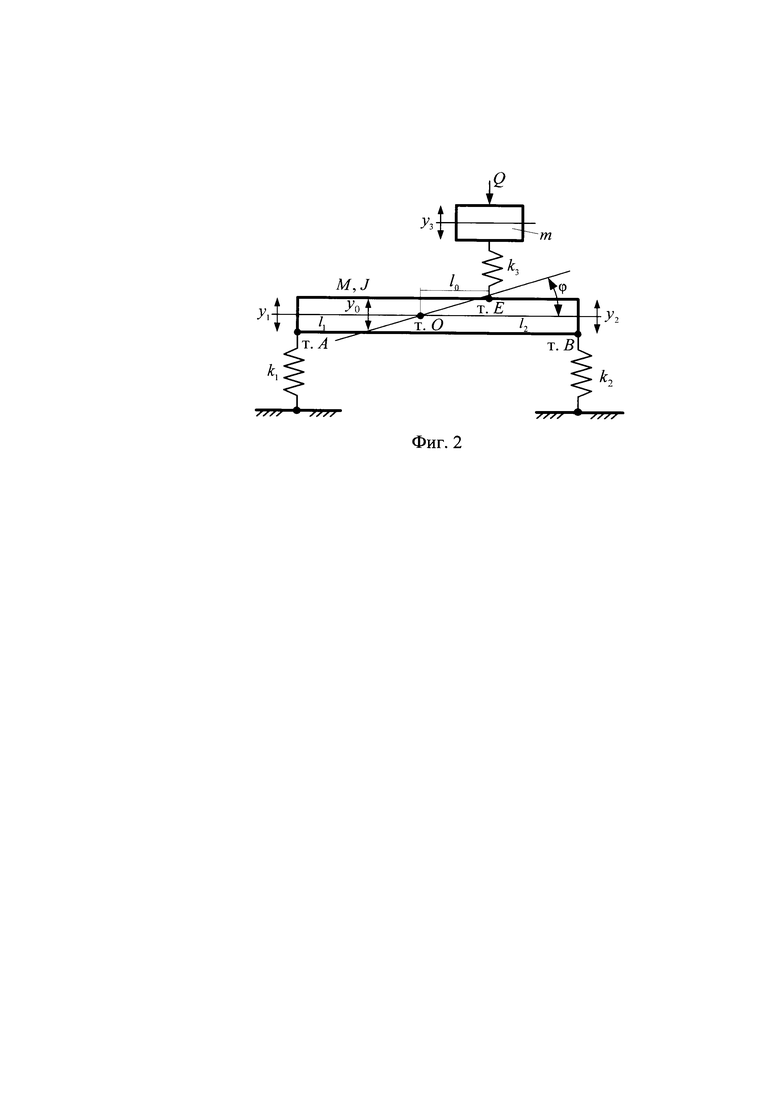
На фиг. 2 приведена расчетная схема технологической вибрационной машины с подпружинным вибровозбудителем.
На фиг. 3 показана структурная математическая модель системы по фиг. 2 в координатах  (координата
(координата  исключена).
исключена).
Изобретение функционирует следующим образом. Предлагаемое изобретение реализуется как способ формирования необходимого для технологических целей вибрационного поля, создаваемого вибровозбудителем, установленным по нижней поверхностью рабочего органа вибростенда (или вибростола).
Рабочий орган представляет собой плиту 2, которая устанавливается на упругие опоры 4, 5, которые, в свою очередь, опираются на опорную неподвижную опорную поверхность 1. Сверху рабочего органа 2 установлен вибровозбудитель 16, опирающийся на пневмобаллон 14 и соединенный с блоком управления 3 через коммуникационную связь 23, приводимый в движение сервоприводами 8, 9, имеющим коммуникационные связи 19, 22 с блоком управления 3, и ходовыми винтами 10, 11 по направляющим 12. Давление воздуха в пневмобаллоне 14, установленном на опорном элементе 13, регулируется при помощи дросселя 17 и клапана 18, связанных с блоком управления 3, содержащем компрессор, через коммуникационные связи 24, 25. При поломке пневмобаллона 14 для того, чтобы сохранить бесперебойную работу вибровозбудителя 16, в конструкции предусмотрен ограничитель 15, на который при неисправности опускается вибровозбудитель 16, тем самым реализуется режим его работы при жесткости пневмобаллона 14 равной бесконечности. При этом остается один режим настройки динамического состояния, реализуемый изменением положения вибровозбудителя 16. Функционирование двух настроечных опций дает широкий набор возможностей для получения нужного режима настройки динамического состояния.
Контроль динамического состояния системы производится в автоматическом режиме блоком управления 3, связанном с датчиками динамического состояния 6 и 7, фиксирующими амплитуды колебаний рабочего органа 1 по координатам у1 и у2, через коммуникационные связи 20, 21.
Система управления динамическим состоянием, отрабатывающая алгоритм управления движением вибровозбудителя 16 по направляющим 12 создает возможности изменения силовых факторов по координатам у1 и у2 и позволяет получать различные динамические режимы работы вибрационной технологической машины, в том числе формирование соотношения между координатами, равного единице.
Теоретическое обоснование
Во многих случаях технологическая вибрационная машина может быть представлена в виде механической колебательной системы, имеющей протяженное твердое тело, обладающее массой М и моментом инерции J, и опирающееся на упругие элементы (пружины с жесткостями k1 и k2) (фиг. 2). Твердое тело (или рабочий орган) совершает колебательные движения в системах координат у1, у2 или у0, ϕ, связанных с неподвижным базисом. Центр масс системы (т. О) расположен на расстояниях  и
и  от концов рабочего органа (тт. (А), (В)). Особенностью технического объекта является закрепление на рабочем органе дополнительного массоинерционного элемента массой т, совершающего вертикальные колебания под действием гармонической силы Q(t), приложенной к массе m. Упругий элемент дополнительной массы (пружина жесткости k3) установлен в точке Е, на расстоянии
от концов рабочего органа (тт. (А), (В)). Особенностью технического объекта является закрепление на рабочем органе дополнительного массоинерционного элемента массой т, совершающего вертикальные колебания под действием гармонической силы Q(t), приложенной к массе m. Упругий элемент дополнительной массы (пружина жесткости k3) установлен в точке Е, на расстоянии  от центра масс т. О. Фрагмент исходной системы в виде массоинерционного элемента m и пружины k3 отражает локальные свойства вибровозбудителя колебаний технологической вибрационной машины. Между системами координат технического объекта существуют отношения:
от центра масс т. О. Фрагмент исходной системы в виде массоинерционного элемента m и пружины k3 отражает локальные свойства вибровозбудителя колебаний технологической вибрационной машины. Между системами координат технического объекта существуют отношения:

где  (в дальнейшем используется
(в дальнейшем используется 
Для составления системы уравнений движения используются приемы, основанные на применении преобразований Лапласа при нулевых начальных условиях

Коэффициенты системы уравнений движения технического объекта (рис. 1) в операторной форме приводятся в табл. 1.
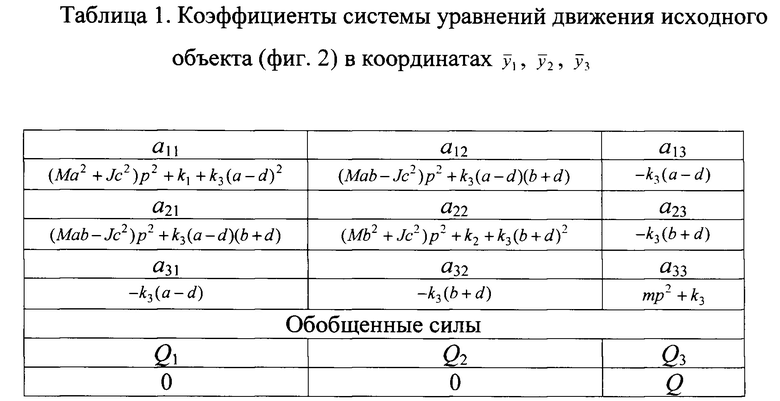
Примечание:  - комплексная переменная; значок 〈-〉 над переменной означает ее изображение по Лапласу.
- комплексная переменная; значок 〈-〉 над переменной означает ее изображение по Лапласу.
Система дифференциальных уравнений (2)÷(4) может быть упрощена для решения задач, связанных с оценкой особенностей распределения амплитуд колебаний точек рабочего органа по его длине  .
.
I. Особенности построения математической модели исходной системы в упрощенном виде. Локализация на расчетной схеме (фиг. 2) дополнительного твердого тела массой m, опирающегося на упругий элемент жесткостью k3, контактирующий в т. Е с рабочим органом (М, J), по существу, может быть интерпретировано как присоединение в т. E динамического гасителя колебаний. Если воспользоваться правилами Крамера, то передаточные функции системы при внешнем возмущении  получим, учитывая значение коэффициентов
получим, учитывая значение коэффициентов 
 из таблицы выражения для передаточных функций W1(p), W2(p), W3(p) при действии входного возмущения
из таблицы выражения для передаточных функций W1(p), W2(p), W3(p) при действии входного возмущения 



где

- является частотным характеристическим уравнением системы.
Из (8) следует, в частности, что система имеет три резонансные частоты. Вместе с тем в системе возможны проявления режимов динамического гашения колебаний. Соответствующие выражения для определения частот динамического гашения колебаний могут быть получены на основе выражений для передаточных функций (5)÷(7) по координатам  ,
, 

в свою очередь, частоты гашения колебаний по координате  , являются корнями следующего биквадратного уравнения:
, являются корнями следующего биквадратного уравнения:

При введении дополнительной связи в форме подгруженного твердого тела массой m в т. Е координата может дважды принимать нулевые значения.
II. Динамическое гашение колебаний в точке контакта дополнительной связи с поверхностью рабочего органа технологической машины.
Координата  в соответствии с соотношением (1) определяется выражением
в соответствии с соотношением (1) определяется выражением

Поскольку  , то (12) преобразуется к виду:
, то (12) преобразуется к виду:

Используя выражения (5), (6), найдем, что

Откуда следует, что координата может принимать нулевые значения (или проявлять режим динамического гашения колебаний) на одной частоте, значение которой определяется из решения частотного уравнения:

или

Откуда следует, частота динамического гашения колебаний по координате .

При этом сохраняется движение по всем трем координатам  то есть точка Е выступает в качестве узла колебаний по отношению к трем координатам, что свидетельствует о возможностях проявления нетрадиционных рычажных связей между движениями координат.
то есть точка Е выступает в качестве узла колебаний по отношению к трем координатам, что свидетельствует о возможностях проявления нетрадиционных рычажных связей между движениями координат.
III. Некоторые вопросы упрощения математической модели системы при исключении одной из координат. Динамические свойства системы, расчетная схема которой приведена на фиг. 2, принципиально не изменяется, если точка Е будет находиться на нижней части поверхности рабочего органа. В таком расположении элементов m и k2(и точки Е) имеется определенный смысл, так как для технологических цепей освобождается верхняя часть вибростенда, а ее нижняя часть становится доступной для настоечных мероприятий.
Координата  может быть исключена из системы уравнений (2)÷(4) при использовании следующего подхода. Запишем уравнения (2)÷(4) в виде
может быть исключена из системы уравнений (2)÷(4) при использовании следующего подхода. Запишем уравнения (2)÷(4) в виде



Из (20) следует, что

После подстановки (21) в уравнения (18), (19), получим упрощенную математическую модель в виде системы уравнений


Структурная математическая модель может быть построена на основе (22), (23) и имеет вид, как показано на фиг. 3.
Структурная математическая модель (фиг. 3), полученная в результате эквивалентных преобразований, формально отображает динамическое состояние с помощью только двух координат  и
и  . В системе действует два синфазных гармонических фактора, обозначенных на фиг. 3 как
. В системе действует два синфазных гармонических фактора, обозначенных на фиг. 3 как  и
и  . На основе аналогичных подходов в рассматриваемом случае можно также отметить наличие двух парциальных блоков с тем отличием, что они относятся к парциальным системам с двумя степенями свободы.
. На основе аналогичных подходов в рассматриваемом случае можно также отметить наличие двух парциальных блоков с тем отличием, что они относятся к парциальным системам с двумя степенями свободы.
Характеристическое частотное уравнение, полученное на основе структурной схемы, приведенной на фиг. 3, имеет вид

В системе координат  можно построить передаточные функции
можно построить передаточные функции


Для оценки динамических состояний, формируемых распределениями амплитуд координат точек рабочего органа машины по его длине введен передаточную функцию межпарциальных связей

или

После подстановки параметров системы из табл. 1 получим

или

Список литературы
1. Ивович В.А.. Виброизоляция горно-обогатительных машин и оборудования. М.: Недра, 1978. 252 с.
2. Гончаревич И.Ф. Теория вибрационной техники и технологии / И.Ф. Гончаревич, К.В. Фролов. - М.: Наука, 1981. - 319 с.
3. Повидайло В.А. Вибрационные устройства в машиностроении. М.; Киев: Машгиз. [Юж. отд-ние], 1962. - 111 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2019 |
|
RU2734839C1 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755534C1 |
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2020 |
|
RU2751169C1 |
| Устройство для формирования вибрационного перемещения рабочей среды | 2021 |
|
RU2773825C1 |

Изобретение относится к области машиностроения. Корректируют динамическое состояние технологической машины. Возбуждают вибрации рабочего органа. Измеряют колебания, регулируют соотношение амплитуд колебаний в разных точках рабочего органа и влияние силовых воздействий на крайние точки рабочего органа посредством передвижения регулируемого вибровозбудителя вдоль поверхности вибрационной технологической машины. Устройство содержит рабочий орган, опирающийся на опорные упругие элементы. Вибровозбудитель выполнен с возможностью перемещения по поверхности рабочего органа в продольном направлении и опирается на пневмобаллон с регулируемой жесткостью. Датчики динамического состояния расположены по краям рабочего органа. Достигается формирование динамического состояния вибрационной технологической машины посредством изменения положения вибровозбудителя. 2 н.п. ф-лы, 3 ил., 1 табл.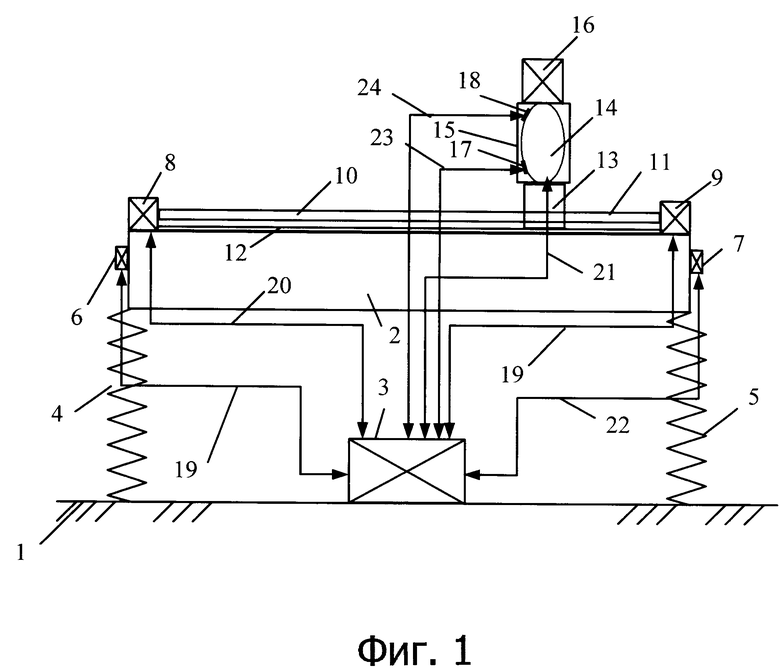
1. Способ коррекции динамического состояния технологической машины, включающий возбуждение вибраций рабочего органа, отличающийся тем, что измеряют колебания, регулируют соотношение амплитуд колебаний в разных точках рабочего органа и влияние силовых воздействий на крайние точки рабочего органа путем передвижения регулируемого вибровозбудителя вдоль поверхности вибрационной технологической машины.
2. Устройство для коррекции динамического состояния технологических машин, включающее рабочий орган, опирающийся на опорные упругие элементы, вибровозбудитель, создающий вибрационное поле, отличающееся тем, что вибровозбудитель имеет возможность перемещения по поверхности рабочего органа в продольном направлении и опирается на пневмобаллон с регулируемой жесткостью, что обеспечивает возможности изменения динамического состояния технологической машины, меняя структуры вибрационного поля за счет изменения положения точки приложения силы и величины изменения упругих сил взаимодействия на основании информации, полученной от датчиков динамического состояния, расположенных по краям рабочего органа.
| ВИБРАЦИОННАЯ ТРАНСПОРТИРУЮЩАЯ МАШИНА | 2012 |
|
RU2532235C2 |
| KR 101750541 B1, 26.06.2017 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Система виброизоляции с автоматическим управлением | 1984 |
|
SU1211494A1 |

