Изобретение относится к области вибрационной техники и может быть использовано для контроля динамического состояния вибрационных технологических машин.
Многие технические объекты, например, технологические вибрационные машины, транспортные средства и др., в выполнении своих задач работают в условиях интенсивных нагрузок, инициирующих динамические взаимодействия, отличающиеся большим разнообразием [1-3]. В качестве расчетных схем технических объектов, совершающих плоские и пространственные движения, при действии на них возмущающих факторов часто используются механические колебательные системы с двумя степенями свободы с сосредоточенными параметрами [4]. Разработаны упрощения математических моделей сложных объектов, в частности, через описание их динамических состояний в нормальных координатах, однако на практике реализация таких подходов обладает большой трудоемкостью и малой физической наглядностью [5]. Таким образом, большое значение имеет учет особенностей динамических связей, возникающих при взаимодействиях не только отдельных элементов системы между собой, но и во взаимодействиях между собой структурных образований из типовых элементарных звеньев.
Предлагается способ управления динамическим состоянием технического объекта при вибрационных воздействиях, основанный на использовании динамических эффектов, возникающих при введении в конструкции рычажных механизмов.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известна вибрационная технологическая машина с управляемым динамическим состоянием для поверхностной обработки упруговязкопластичных сред [Белокобыльский С.В., Мамаев Л.А., Кашуба В.Б., Ситов И.С. «Вибрационная технологическая машина с управляемым динамическим состоянием для поверхностной обработки упруговязкопластичных сред», патент №78122 U1, МПК В28В 11/08, приоритет 20.11.2008], содержащая в составе своей конструкции каретку с закрепленным на ней рабочим органом в виде бруса с вибрационными секторами, разбитыми на пары, отличающаяся тем, что на каретке установлен динамический гаситель, состоящий из упругого элемента и массы.
К недостаткам данной полезной модели можно отнести отсутствие в конструкции средств контроля вибрационного состояния и средств для изменения приведенной динамической жесткости системы.
Известна система управления многонаправленным испытательным вибростендом [Белокобыльский С.В., Мамаев Л.А., Кашуба В.Б., Ситов И.С. «Вибрационная технологическая машина с управляемым динамическим состоянием для поверхностной обработки упруговязкопластичных сред», патент №78122 U1, МПК В28В 11/08, приоритет 20.11.2008], содержащая акселерометр, аналого-цифровой преобразователь, цифроаналоговый преобразователь, фильтр нижних частот, усилитель мощности, ЭВМ, имеющую программный модуль координации функционирования элементов системы и программного обеспечения, модуль управления вибрационным стендом, модуль генератора испытательных сигналов и измерителя статистических характеристик сигналов и таймер, отличающаяся тем, что с целью повышения точности воспроизведения заданных параметров вибрации на испытуемом изделии дополнена лазерным виброметром, оснасткой с возможностью регулирования наклона закрепленного на ней объекта и установленной на платформе вибростенда, фильтром нижних частот, адаптером последовательного кода в цепи обратной связи регулируемой системы.
Недостатками рассматриваемой полезной модели являются сложность конструкции и отсутствие упоминания о возможностях получения однородного вибрационного поля.
Также известен способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления [Елисеев С.В., Елисеев А.В., Е.В., Нгуен Д.Х., Выонг К.Ч. «Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления», патент №2624757 С1, МПК F16F 15/02, приоритет 06.07.2017], заключающийся в применении инерционный вибровозбудитель, действующий в определенной точке, отличающийся введением в конструктивно-техническую схему системы устройства для преобразования движения в виде несамотормозящегося винтового механизма с гайкой-маховиком с перемещением вдоль рабочего органа точки приложения усилия, возникающего при работе элементов винтовой пары, генерирующей дополнительные стабилизирующие движения рабочего органа таким образом, чтобы вибрационное поле имело однородную структуру и обеспечивало возможности регулирования и настройки вибрационной системы для реализации необходимых параметров технологического процесса. Устройство, реализующее способ, представляющее собой конструктивно-технический блок, состоящий из винтового несамотормозящегося механизма с массивной гайкой-маховиком, на торцевой части которой может быть создан момент сил путем прижатия тормозной колодки специальным приводом, что генерирует управляющее воздействие в определенной точке рабочего органа вибростенда; устройство для преобразования движения также отличается тем, что точка приложения усилия на рабочий орган может изменяться в результате перемещения конструктивного блока вдоль рабочего органа с помощью синхронно работающих двух электроприводов, обеспечивающих перемещение верхней и нижней частей конструктивно-технического блока с помощью ходовых винтов, управляемого специальным программным блоком, в который для расчетов по заложенной математической модели поступает информация с датчиков, контролирующих вибрационное состояние и системы.
К недостаткам данного способа можно отнести сложность конструкции и отсутствие возможности получения однородного вибрационного поля.
За прототип принимается способ управления работой вибрационной машины при разгрузке сыпучих материалов из вагонов [Лапшин В.Ф., Долгих К.О. «Способ управления работой вибрационной машины при разгрузке сыпучих материалов из вагонов», патент №2465189 С2, МПК B65G 67/00, приоритет 27.10.2012], включающий установку вагона на эстакаду, открытие разгрузочных люков, установку на верхнюю обвязку накладной вибрационной машины, отличающийся тем, что перед включением вибромашины на несущие конструкции и обшиву кузова вагона устанавливают многокомплектные акселерометры, которые подключают к блоку управления, содержащему узел опроса акселерометров, узел сравнения полученных данных с запрограммированными в нем нормативными показателями и узел регулирования режима работы вибрационной машины, причем сигналы от каждого из акселерометров одновременно поступают в узел опроса каждый на соответствующий вход приемников сигналов, с выходов которого сигналы передаются в узел сравнения данных, где они сравниваются с нормативными показателями, при этом при превышении каким-либо сигналом нормативного показателя узел сравнения передает этот сигнал в узел регулирования режима работы вибрационной машины, который автоматически корректирует режим работы вибрационной машины.
Основным недостатком данного изобретения отсутствие четких критериев оценки вибрационного состояния вибрационной машины, отсутствие возможности регулирования приведенной жесткости системы, а также невозможность получения однородного вибрационного поля.
Задачей изобретения управление динамическим состоянием технического объекта за счет изменения приведенной жесткости системы.
Способ управления динамическим состоянием технического объекта при вибрационных воздействиях, включающий возбуждение колебаний рабочего органа вибрационной технологической машины и регистрацию параметров ее динамического состояния, отличающийся тем, отличающийся тем, что производят настройку соотношения амплитуд колебаний между координатами движения вибрационной машины для получения единичного значения согласно информации, поступающей с датчиков контроля динамического состояния в блок управления, и производят настройку соотношения между этими амплитудами до получения режима синхронной работы вибрационной технологической машины по двум координатам, причем регулируют приведенную жесткость системы за счет изменения жесткости пневмобаллона.
Устройство для реализации способа по п. 1, отличающееся тем, что на опорной поверхности располагается упругая система рабочего органа, состоящая из двух симметрично расположенных шарнирно-рычажными механизмов, содержащих Г-образные рычаги, соединенные со стойками, опирающимися на пружины, и между собой через расположенные параллельно рабочему органу винтовой несамотормозящийся механизм и пневмобаллон, снабженный клапаном и дросселем, причем изменение давления в пневмобаллоне осуществляется на основе данных, поступающих в блок управления и обработки информации от датчиков контроля динамического состояния, находящихся на рабочем органе, и позволяет регулировать приведенную жесткость системы и обеспечивать для рабочего органа вибрационной технологической машины согласованную работу двух координат движения.
Суть изобретения поясняется чертежами
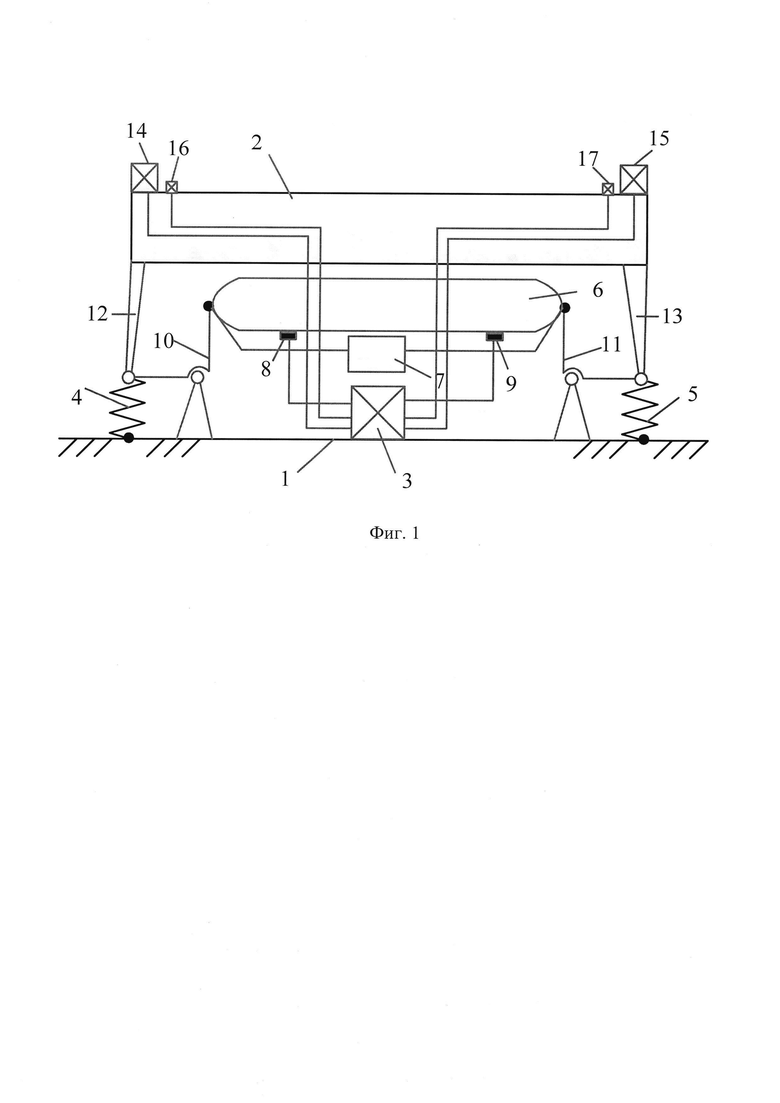
На фиг. 1 представлена принципиальная схема, содержащая опорную поверхность 1, рабочий орган вибрационной машины 2, блок управления и обработки информации 3, пружины 4, 5, пневмобаллон 6, клапан 7, дроссель 8, Г-образные рычаги 9, 10, стойки 11, 12, вибровозбудители 13, 14, датчики контроля динамического состояния 15, 16.
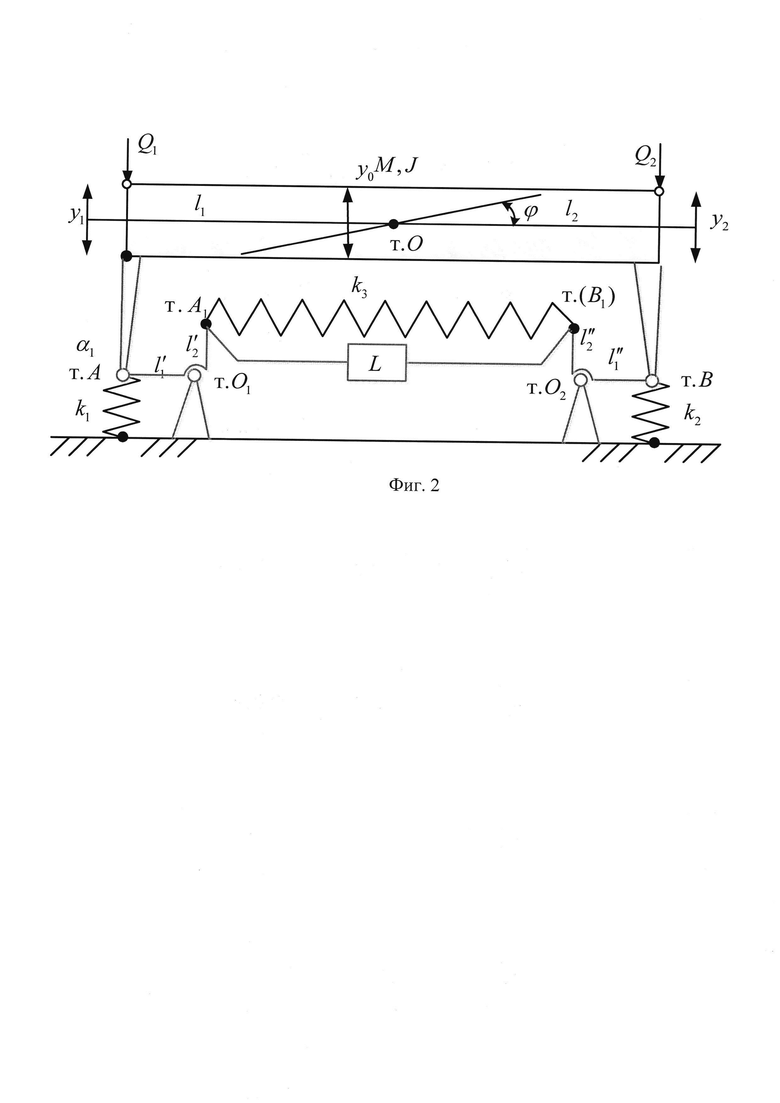
На фиг. 2 приведена расчетная схема механической колебательной системы с дополнительными рычажно-инерционно-упругими связями.
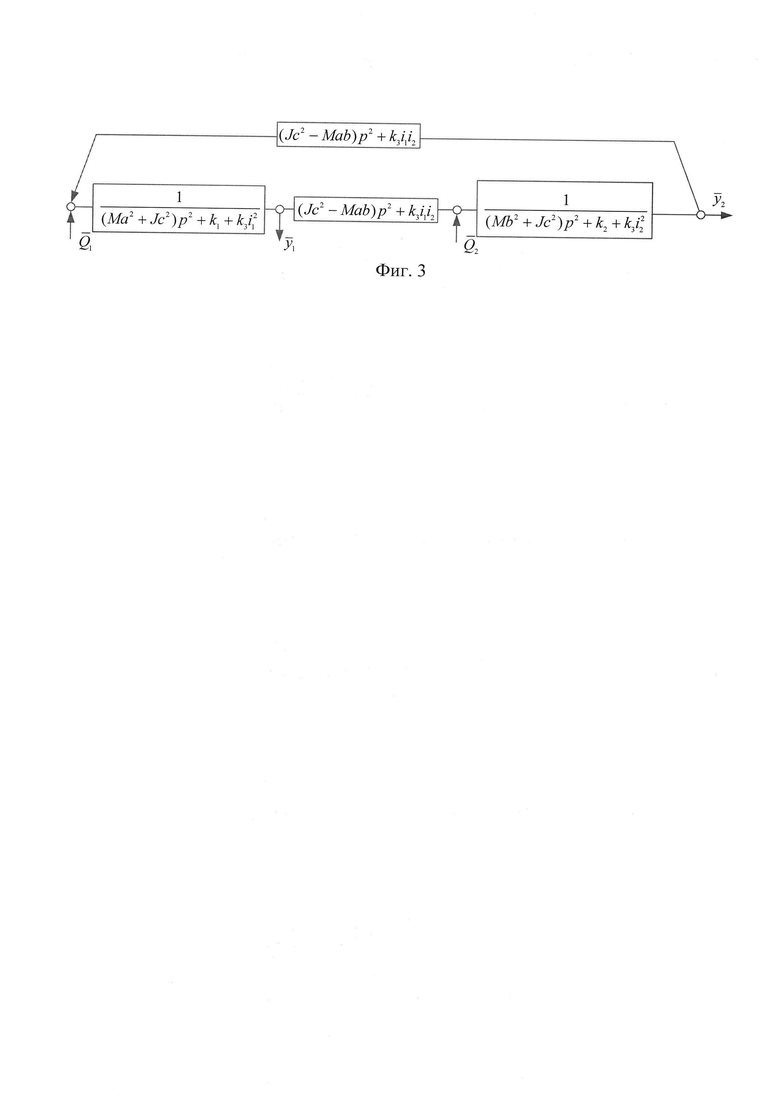
На фиг. 3 показана структурная математическая модель (структурная схема) исходной механической системы по фиг. 2.
Изобретение работает следующим образом.
На фиг. 1 представлена принципиальная схема, содержащая опорную поверхность 1, рабочий орган вибрационной машины 2, блок управления и обработки информации 3, пружины 4, 5, пневмобаллон 6, винтовой несамотормозящийся механизм 7, клапан 8, дроссель 9, Г-образные рычаги 10, 11, стойки 12, 13, вибровозбудители 14, 15, датчики контроля динамического состояния 16, 17.
Вибрационные процессы на рабочем органе 2, инициируются двумя инерционными возбудителями 14 и 15. Рабочий орган 2 контактирует с опорной поверхностью 1 через упруго-рычажные каскады, состоящие из пружин 4, 5, стоек 12, 13 и Г-образных рычагов 10, 11. Пружины 4, 5 присоединены напрямую к опорной поверхности и через стойки 12, 13 к рабочему органу 2 через концы Г-образных рычагов 10, 11. Противоположные концы рычагов 10, 11 соединены между собой через пневмобаллон 6, снабженный клапаном 8 и дросселем 9, и винтовой несамотормозящийся механизм 7.
Изменение приведенной жесткости производится с помощью пневмобаллона 6, давление в котором регулируется при помощи клапаном 8 и дросселем 9 в зависимости от поступивших в блок управления и обработки информации 3 данных, полученных с датчиков контроля динамического состояния 16, 17. Изменение давления воздуха в пневмобаллоне 6 может производиться вручную или в автоматическом режиме для получения режима связности координат движения в виде  , что распространяется на весь частотный диапазон.
, что распространяется на весь частотный диапазон.
Более подробно суть изобретения раскрыта при помощи математического моделирования, приведенного в теоретическом обосновании.
Теоретическое обоснование
Расчетная схема рассматриваемого объекта в виде твердого тела с двумя степенями свободы приведена на фиг. 2 и содержит все необходимые обозначения. Твердое тело обладает массой М и имеет момент инерции J. Система обладает линейными свойствами и совершает малые колебания относительно положения статического равновесия. Движение описывается в координатах у1, у2 неподвижного базиса.
Особенностью системы, которая обеспечивает опирание твердого тела (М, J) в тт. А, В на упругие элементы с жесткостями k1 и k2 соответственно, является наличие двух Г-образных рычагов (или рычажных механизмов второго рода), имеющих опоры в тт. O1, O2 (фиг. 2). Г-образные рычаги в тт. А1, В1 соответственно соединяются с упругим элементом жесткостью k3 и устройством для преобразования движения (УПД), обладающего приведенной массой L (фиг. 2). Прямоугольного типа Г-образный рычаг имеет длины плеч  ,
,  и
и  ,
,  соответственно, что определяет передаточные отношения рычагов
соответственно, что определяет передаточные отношения рычагов

и 
Горизонтальные перемещения тт. А1, В1 определяются выражениями 
I. Построение математической модели
Для построения математической модели запишем выражения для кинетической и потенциальной энергий системы


Используя формализм Лагранжа 2 рода, получим систему дифференциальных уравнений, которая в координатах у1 и у2 на основе выражений (4), (5) принимает вид


После преобразований Лапласа при нулевых начальных условиях система уравнений (6), (7) может быть представлена в операторной форме


где

При выводе уравнений (6), (7) использовались соотношения

Структурная математическая модель исходной системы по фиг. 2 в виде структурной схемы эквивалентной в динамическом отношении системы автоматического управления, приведена на фиг. 3 ((р=jω - комплексная переменная 
Из структурной схемы на фиг. 3 следует, что система состоит из двух парциальных систем, между которыми существует упруго-инерционная связь, отображаемая звеном с передаточной функцией

Без дополнительных рычажных связей структурная схема на фиг. 3 редуцируется до ее обычного вида с межпарциальной инерционной связью.
II. Свойства системы с упруго-инерционными связями
Используя структурную схему на фиг. 3, запишем передаточные функции системы, полагая, что между внешними силовыми факторами  и
и  , в виде синфазных гармонических функций, существует отношения связности, при которых
, в виде синфазных гармонических функций, существует отношения связности, при которых

где α - коэффициент связности внешних сил, который может принимать положительные, отрицательные и нулевые значения.
Запишем передаточные функции системы в обобщенном виде



где

- является частотным характеристическим уравнением системы.
Система обладает парциальными частотами
Частоты динамического гашения колебаний определяются выражениями


Из (20), (21) следует, что исходная система при наличии рычажных связей и связности внешних воздействий имеет по каждой из координат  и
и  по режиму динамического гашения колебаний. В обычной ситуации система (α=0, k3=0) имеет лишь одну частоту динамического гашения колебаний по координате
по режиму динамического гашения колебаний. В обычной ситуации система (α=0, k3=0) имеет лишь одну частоту динамического гашения колебаний по координате  .
.
Частоты собственных колебаний системы определяются из решения системы определяются из решения частотного характеристического уравнения (17).
При введении дополнительных рычажных связей в системе возникает новый динамический эффект, который заключается в возможности трансформации инерционной связи (в обычной механической колебательной системе) в связь инерционно-упругую. Такая межпарциальная связь отличается тем, что на частоте

парциальные системы не вступают в динамические взаимодействия, а колеблются каждая в автономном режиме.
Соотношение амплитуд колебаний по координатам  и
и  может быть найдено при подстановке (22) в выражение для передаточной функции межпарциальных связей (16), что отображается выражением при
может быть найдено при подстановке (22) в выражение для передаточной функции межпарциальных связей (16), что отображается выражением при

Из (23) следует, что при «обнулении» межпарциальной связи отношение  к
к  может изменяться в достаточно широких пределах в зависимости от соотношения параметров системы.
может изменяться в достаточно широких пределах в зависимости от соотношения параметров системы.
Для настройки вибрационного поля особое значение имеют соотношения между параметрами, когда выполняется условие

При p → 0 выражение (24) имеет предельное значение

При р → ∞ выражение (24) принимает вид

Соотношение (24) принимает при р → ∞ значение  при особых значения α.
при особых значения α.
Для формирования однородного распределения амплитуд точек твердого тела (фиг. 2) запишем условие, используя выражение (16), когда  .
.
В этом случае может быть найдено условие для определения соответствующей частоты внешнего силового возмущения
Выражение (27) определяет частоту внешнего воздействия, при которой становится возможным выполнение условия  . В этом случае вибрационное поле имеет однородную структуру; при этом угловые колебания твердого тела не реализуются (ϕ=0). При необходимости изменить значение частоты из выражения (27) требуемый результат может быть получен варьированием настроечных параметров, в качестве которых могут быть выбраны коэффициент связности внешних факторов α, передаточные отношения рычажных связей i1 и i2. В общем случае для достижения искомого динамического состояния может быть использовано и изменение жесткости k3. Возможности настройки параметров вибрационного поля могут быть расширены введением параллельно упругому элементу дополнительной связи в виде устройства для преобразования движения (УПД), которое обладает передаточной функцией Lp2, то есть может рассматриваться как звено двойного дифференцирования в составе структурной математической модели или структурной схемы системы, приведенной на фиг. 3.
. В этом случае вибрационное поле имеет однородную структуру; при этом угловые колебания твердого тела не реализуются (ϕ=0). При необходимости изменить значение частоты из выражения (27) требуемый результат может быть получен варьированием настроечных параметров, в качестве которых могут быть выбраны коэффициент связности внешних факторов α, передаточные отношения рычажных связей i1 и i2. В общем случае для достижения искомого динамического состояния может быть использовано и изменение жесткости k3. Возможности настройки параметров вибрационного поля могут быть расширены введением параллельно упругому элементу дополнительной связи в виде устройства для преобразования движения (УПД), которое обладает передаточной функцией Lp2, то есть может рассматриваться как звено двойного дифференцирования в составе структурной математической модели или структурной схемы системы, приведенной на фиг. 3.
В принципе возможности формирования структуры вибрационного поля будут расширены введением еще одного настроечного параметра, но в целом ситуация принципиально не изменится.
Таким образом введение дополнительных связей упруго-рычажной природы можно рассматривать как способ настройки, коррекции и управления динамическим состоянием рабочего органа вибрационной технологической машины. Способ обладает достаточно большим потенциалом вариативных возможностей и может быть при необходимости переведен на автоматическую настройку. Устройство для реализации способа представляет собой рычажную систему с элементами, соединенными пружиной с жесткостью k3.
Устройство состоит из специально вводимых рычажных связей, отличающееся тем, что рычажные связи за счет использования Г-образных рычагов имеет возможность влиять на формирование межпарциальных связей, превращая исходную инерционную природу межпарциальных связей в упруго-инерционную, что обеспечивает необходимые условия для настройки.
Список литературы
1. Быховский И.И. Основы теории вибрационной техники. М.: Машиностроение, 1968. - 362 с.
2. Ивович В.А.. Виброизоляция горно-обогатительных машин и оборудования. М.: Недра, 1978. 252 с.
3. Онищенко В.И. и др. Технология металлов и конструкционные материалы. Москва, Агропромиздат, 1991 г., 479 с.,
4. Ганиев Р.Ф. Волновые машины и технологии (Введение в волновую технологию). Москва, научно-издательский центр «Регулярная и хаотическая динамика», 2008, - 192 с.
5. Clarence W. De Silva. Vibration. Fundamentals and Practice. Boca Raton, London, New York, Washington, D.C., CRC Press, 2000.957 p.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство формирования специфических режимов динамического состояния рабочего органа вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2756393C1 |
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2019 |
|
RU2734839C1 |
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |
| Способ настройки распределения амплитуд колебаний рабочего органа вибростенда и устройство для его осуществления | 2018 |
|
RU2695899C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755534C1 |
| Способ корректировки распределения амплитуд колебаний рабочего органа вибрационного технологического стенда и устройство для его реализации | 2018 |
|
RU2716368C1 |
| Устройство для формирования вибрационного перемещения рабочей среды | 2021 |
|
RU2773825C1 |
Изобретение относится к области машиностроения. Возбуждают колебания рабочего органа вибрационной технологической машины и регистрируют параметры ее динамического состояния. Производят настройку соотношения амплитуд колебаний между координатами движения вибрационной машины для получения единичного значения согласно информации, поступающей с датчиков контроля динамического состояния в блок управления. Производят настройку соотношения между амплитудами до получения режима синхронной работы вибрационной технологической машины по двум координатам. Регулируют приведенную жесткость системы за счет изменения жесткости пневмобаллона. Устройство содержит упругую систему рабочего органа. Г-образные рычаги соединены со стойками, опирающимися на пружины, и между собой через расположенные параллельно рабочему органу винтовой несамотормозящийся механизм и пневмобаллон. Достигается возможность управления динамическим состоянием объекта за счет изменения приведенной жесткости системы. 2 н.п. ф-лы, 3 ил.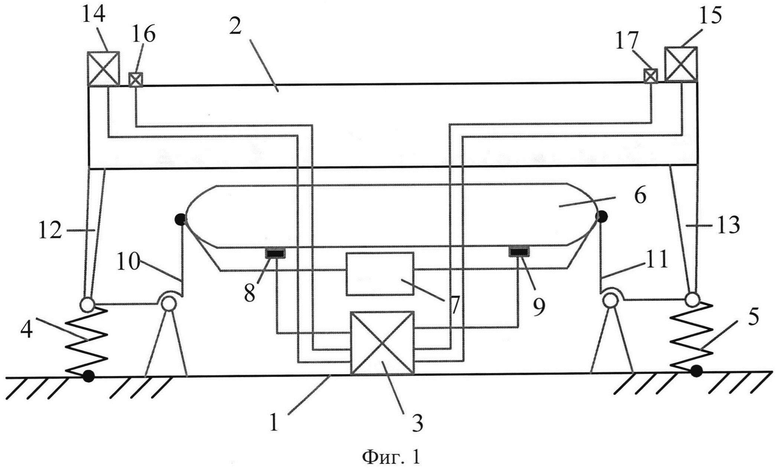
1. Способ управления динамическим состоянием технического объекта при вибрационных воздействиях, включающий возбуждение колебаний рабочего органа вибрационной технологической машины и регистрацию параметров ее динамического состояния, отличающийся тем, что производят настройку соотношения амплитуд колебаний между координатами движения вибрационной машины для получения единичного значения согласно информации, поступающей с датчиков контроля динамического состояния в блок управления, и производят настройку соотношения между этими амплитудами до получения режима синхронной работы вибрационной технологической машины по двум координатам, причем регулируют приведенную жесткость системы за счет изменения жесткости пневмобаллона.
2. Устройство для реализации способа по п. 1, отличающееся тем, что на опорной поверхности располагается упругая система рабочего органа, состоящая из двух симметрично расположенных шарнирно-рычажных механизмов, содержащих Г-образные рычаги, соединенные со стойками, опирающимися на пружины, и между собой через расположенные параллельно рабочему органу винтовой несамотормозящийся механизм и пневмобаллон, снабженный клапаном и дросселем, причем изменение давления в пневмобаллоне осуществляется на основе данных, поступающих в блок управления и обработки информации от датчиков контроля динамического состояния, находящихся на рабочем органе, и позволяет регулировать приведенную жесткость системы и обеспечивать для рабочего органа вибрационной технологической машины согласованную работу двух координат движения.
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Дисковый питатель погрузчика | 1960 |
|
SU136112A1 |

