Изобретение относится к области вибрационной техники и может быть использовано при проектировании технологических вибрационных машинам.
Вибрационные технологические машины широко используются в различных производительных процессах в горнодобывающей промышленности (грохоты, вибрационные питатели и транспортеры, классификаторы и др.), в строительной индустрии, на химических предприятиях и др. [1 - 5]. Рабочие органы таких машин создают вибрационные поля, которые обеспечивают необходимые формы взаимодействия гранулированных сыпучих рабочих сред с обрабатываемыми деталями. В настоящее время разработаны и реализуются сложные технологические процессы, в которых контролируются не только параметры и структура вибрационных полей рабочих органов, но и особенности динамических взаимодействий рабочих сред в вибрационных режимах и др. [2, 6, 7].
Настройка вибрационных машин и поддержание параметров вибрационных взаимодействий является достаточно сложной задачей, требующей детализированных представлений о динамических свойствах технического объекта, знаний о возможностях оценки, контроля и изменения динамических свойств системы.
Во многих случаях для предварительной оценки спектра динамических свойств вибрационных технологических машин используются расчетные схемы в виде механических колебательных систем с несколькими степенями свободы [5, 8-10]; получаемые при этом математические модели дают возможность комплексной оценки свойств технологической машины и выбора возможных направлений в создании способов и средств оценки, контроля и корректировки динамических состояний, что в значительной степени обеспечивает надежность работы машин, повышает динамическое качество и конкурентоспособность оборудования в условиях
В связи с этим актуальными представляются инициативы по поиску, разработке и использованию новых динамических эффектов в работе технологических систем, которые возникают при введении в технологические схемы дополнительных связей, использовании динамических эффектов одновременного действия нескольких факторов, создающих эффекты связности движений по нескольким координатам, динамического гашения колебаний, проявления специфических форм динамических состояний и др.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известно изобретение [Серга Г.В., Резниченко С.М. «Вибрационная машина для предпосевной обработки семян», 2585476 С1, МПК А01С 1/00, приоритет 27.05.2016], представляющее собой вибрационную машину для предпосевной обработки семян содержит шлифовальный барабан, внутренняя поверхность которого покрыта слоем резины, с разгрузочным окном, рабочий орган, бункер-дозатор, выгрузной лоток, установленные упруго на основании. Шлифовальный барабан выполнен коническим, многозаходным, винтовым и смонтирован из направляющих элементов, выполненных из трех и более скрученных по винтовой линии в продольном направлении относительно продольной оси и изогнутых по винтовой линии в поперечном направлении на оправке в виде параболоида вращения полос, выполненных с боковыми кромками выпуклой криволинейной формы, с напусками и описанных кривыми различного порядка и степени кривизны. При этом по всей длине внутри шлифовального барабана образованы напуски в виде винтовых лопастей, причем по всей длине шлифовального барабана смонтирована коническая пружина с плоским сечением витков и с устройством для изменения шага витков путем растяжения или сжатия пружины. Упрощенная конструкция устройства позволяет расширить его технологические возможности.
К недостаткам данного изобретения можно отнести отсутствие автоматического регулирования динамического состояния вибрационной машины, а также отсутствие режима «зануления» угловых колебаний.
Также известен способ вибрационной обработки деталей [Митрофанов И.А., Вариченко Л.Ю. «Способ вибрационной обработки деталей и устройство для его осуществления», патент №2123419 G1, МПК В24В 31/06, приоритет 20.12.1998], заключающийся в размещении деталей в контейнере с обрабатывающей средой и сообщении им вибраций, отличающийся тем, что обрабатывающую среду уплотняют однонаправленными колебаниями деталей, сдерживают ее от колебаний у обрабатываемых поверхностей и разуплотняют среду струями фонтанирующей жидкости, периодически подавая ее в направлении колебаний под обрабатываемые детали и регулируя ее расход из условия изменения состояния обрабатывающей среды от монолитного до взвешенного. Устройство для вибрационной обработки, содержащее основание со смонтированным на нем контейнером, в котором размещено приспособление для обрабатываемых деталей, жестко соединенное с виброприводом, отличающееся тем, что вибропривод упруго установлен на основании с возможностью съема, а контейнер выполнен в виде цилиндра с расположенными на внутренней его поверхности перпендикулярно образующей ребрами и с конусным дном и установлен на основании с возможностью наклона, при этом устройство снабжено смонтированным в дне контейнера патрубком с размещенными соответственно внутри и снаружи контейнера по меньшей мере одной насадкой и гибким трубопроводом с дросселем, а также обтекателем, закрепленным на приспособлении для обрабатываемых деталей, и кольцеобразным желобом, установленным по периметру цилиндра контейнера и имеющим отвод, расположенный над воронкой, сообщенной с отстойником.
Рассмотренное изобретение имеет ряд недостатков, к которым можно отнести отсутствие автоматического регулирования динамического состояния вибрационной машины и математического описания работы предложенного устройства.
Известна вибрационная транспортирующая машина [Антипов В.И., Антипова Р.И., Кошелев А.В., Денцов Н.Н. «Вибрационная транспортирующая машина», патент №2532235 О, МПК В06В 1/00, приоритет 27.10.2014], включающая рабочий орган, соединенный упругой связью с реактивной частью, несущей средство для сообщения резонансных однонаправленных колебаний, и амортизаторы малой жесткости, отличающаяся тем, что средство для сообщения резонансных однонаправленных колебаний выполнено в виде смонтированных на реактивной части машины, по меньшей мере, пары одинаковых параметрических вибровозбудителей, установленных с возможностью вращения роторов инерционных элементов в противоположных направлениях в вертикальных плоскостях и приводимых во вращение от независимых электродвигателей, а резонансная частота средства для сообщения резонансных однонаправленных колебаний определяется из соотношений ω=λ1+λ2, λ1=ν⋅ω, 0<ν<l, где ω - усредненное значение парциальных угловых скоростей роторов, λ1 - эффективная собственная частота качающихся маятников роторов инерционных элементов, λ2=√(C/Mпр) - парциальная собственная частота рабочего органа, соответствующая противофазной форме однонаправленных свободных колебаний, Мпр=М1М2/(М1+М2) - приведенная масса, С - жесткость упругой связи, M1 - масса рабочего органа, М2 - общая масса реактивной части машины.
Недостатками представленного аналога являются невнимание к автоматическому регулированию динамического состояния вибрационной машины, а также отсутствие режима обнуления угловых колебаний системы.
За прототип взят способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления [Елисеев С.В., Елисеев А.В., Каимов Е.В., Нгуен Д.Х., Выонг К.Ч. «Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления», патент №2624757 С1, МПК F16F 15/02, приоритет 06.07.2017], состоящий из рабочего органа в виде твердого тела на упругих элементах, имеющего инерционный вибровозбудитель, действующий в определенной точке, отличающийся введением в конструктивно-техническую схему системы устройства для преобразования движения в виде несамотормозящегося винтового механизма с гайкой-маховиком с перемещением вдоль рабочего органа точки приложения усилия, возникающего при работе элементов винтовой пары, генерирующей дополнительные стабилизирующие движения рабочего органа таким образом, чтобы вибрационное поле имело однородную структуру и обеспечивало возможности регулирования и настройки вибрационной системы для реализации необходимых параметров технологического процесса. Устройство, реализующее способ, представляющее собой конструктивно-технический блок, состоящий из винтового несамотормозящегося механизма с массивной гайкой-маховиком, на торцевой части которой может быть создан момент сил путем прижатия тормозной колодки специальным приводом, что генерирует управляющее воздействие в определенной точке рабочего органа вибростенда; устройство для преобразования движения также отличается тем, что точка приложения усилия на рабочий орган может изменяться в результате перемещения конструктивного блока вдоль рабочего органа с помощью синхронно работающих двух электроприводов, обеспечивающих перемещение верхней и нижней частей конструктивно-технического блока с помощью ходовых винтов, управляемого специальным программным блоком, в который для расчетов по заложенной математической модели поступает информация с датчиков, контролирующих вибрационное состояние и системы.
Основным недостаткам прототипа является отсутствие режима согласованной работы координат движения вибрационной машины, позволяющего «обнулять» угловые колебания.
Задачей изобретения настройка динамического состояния вибрационной технологической машины при помощи изменения параметров положения и жесткости дополнительного пневмобаллона.
Способ настройки динамического состояния вибрационной технологической машины и устройство для его реализации, включающий возбуждение колебаний рабочего органа вибрационной технологической машины и регистрацию смещений координат движения вибрационной технологической машины, отличающийся тем, что для получения режима стабилизации колебательного движения при обнулении угловых вибраций рабочего органа вводят в систему дополнительный вибровозбудитель и пневматический упругий элемент, причем при помощи изменения положения пневматического упругого относительно центра масс системы элемента и давления в нем регулируют приведенную жесткость системы.
Устройство для реализации способа настройки динамического состояния вибрационной технологической машины, содержащее твердое тело на упругих опорах, вибровозбудитель, датчики и дополнительный регулируемый упругий элемент, отличающееся тем, что дополнительный упругий элемент представляет собой пневмобаллон, регулирование параметров которого осуществляется за счет специальной автоматической системы поднастройки, основанной на применении встроенного компрессора, системы управляемых дросселей и возможностей перемещения вертикальной оси блока относительно центра масс за счет движения опорных элементов по специальным направляющим, закрепленным как на опорной поверхности, так и на рабочем органе с возможностями равномерного перемещения вертикальной оси пневмобаллона на определенное ей расстояние относительно центра масс системы с помощью синхронно работающих сервоприводов и ходовых винтов.
Суть изобретения поясняется чертежами.
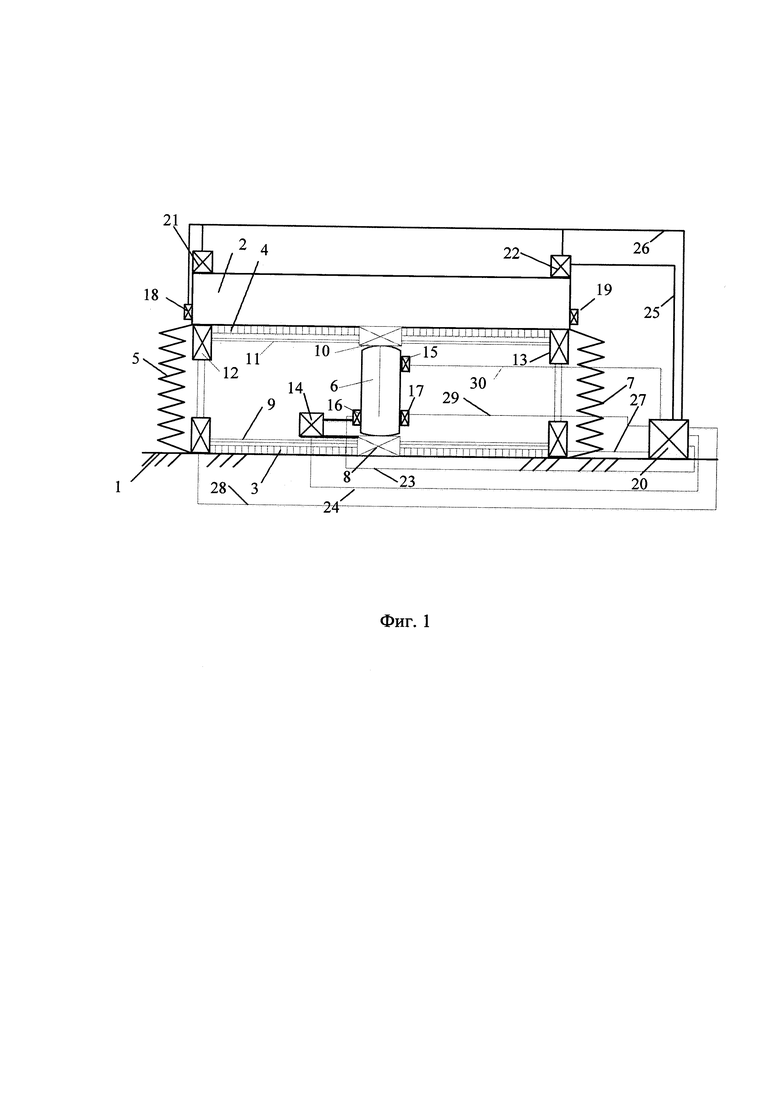
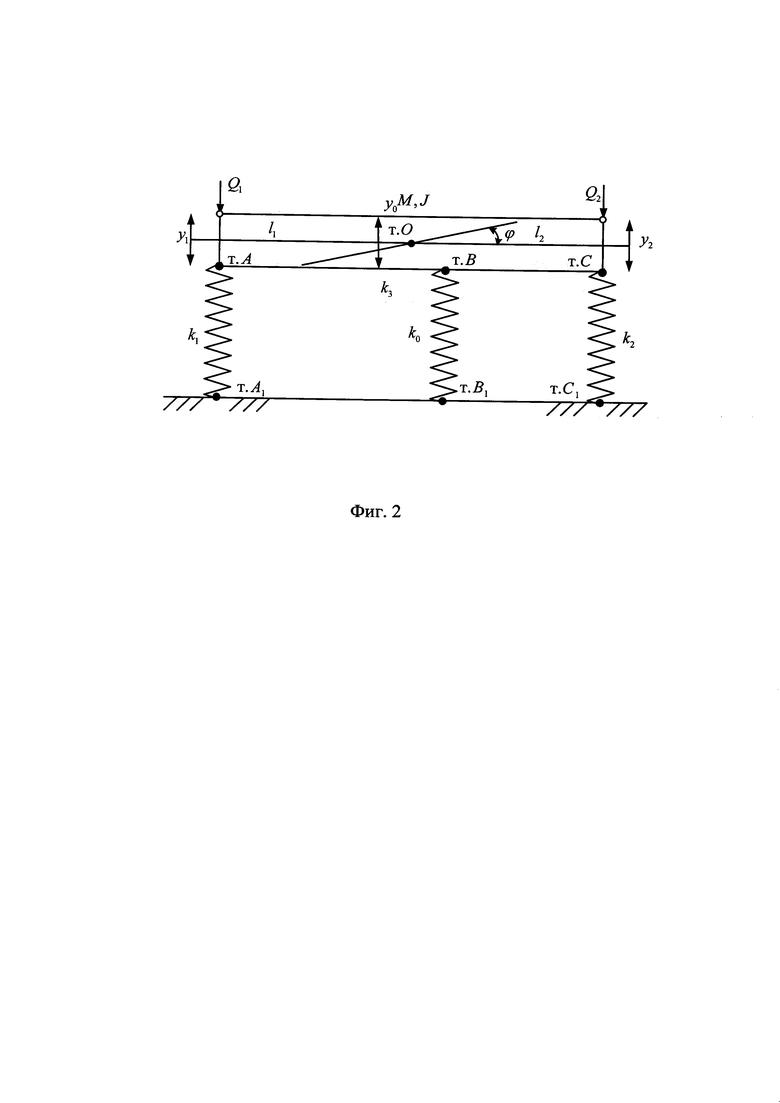
На фиг. 1 показана принципиальная схема вибрационной технологической машины с устройствами настройки динамического состояния, содержащая опорную поверхность 1, рабочий орган 2, направляющие 3, 4, упругие элементы 5, 7, пневмобаллон 6, перемещающиеся опоры 8, 10, ходовые винты 9, 11, электрические сервоприводы 12, 13, компрессор 14, управляемые клапаны 15, 16, 17, датчики 18, 19, блок управления 20, вибровозбудители 21, 22, коммуникационные связи 23, 24, 25, 26, 27, 28, 29, 30.
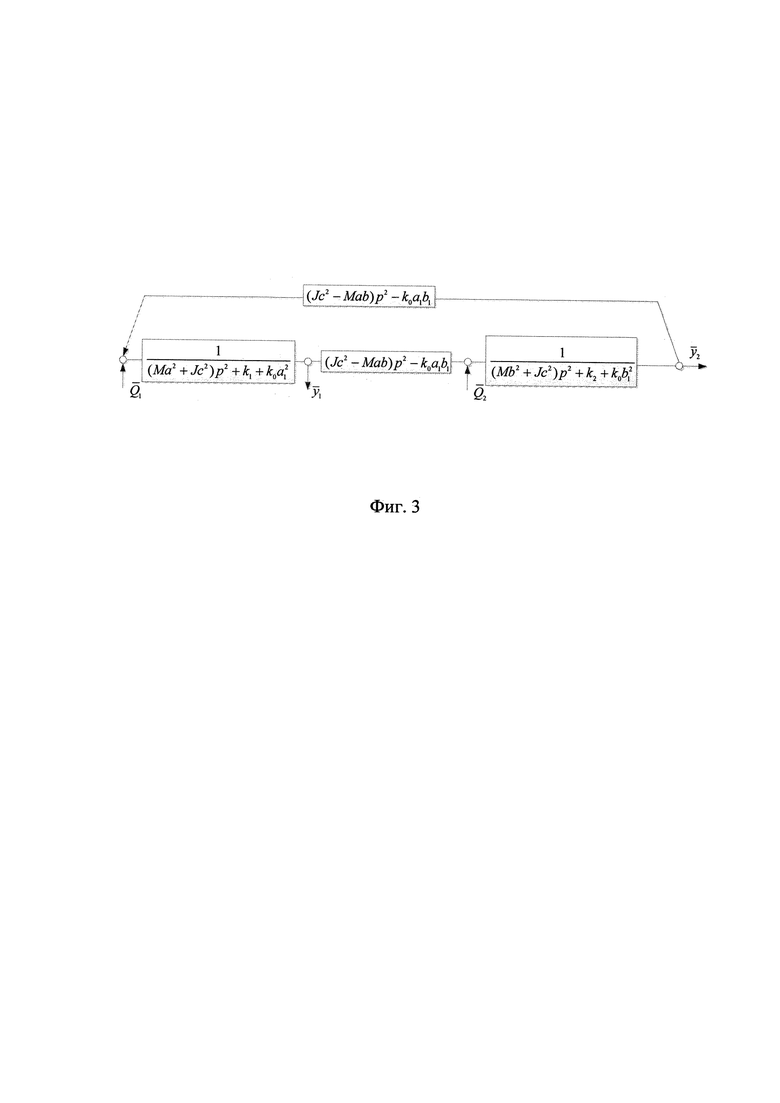
На фиг. 2 приведена расчетная схема вибрационной технологической машины, принципиальные особенности которой были представлены на фиг. 1.
На фиг. 3 показана структурная математическая модель (структурная схема) исходной системы технологической вибрационной машины по фиг. 2.
Изобретение работает следующим образом.
Предлагаемое изобретение реализует способ настройки динамического состояния вибрационной технологической машины, осуществляющийся механической колебательной системой, состоящей из рабочего органа 3 или твердого тела, обладающего массой М и моментом инерции J, отображающих производственную загрузку технологической машины. Рабочий орган 3 через упругие элементы 5 и 7 с соответствующими жесткостями k1 и k2 опираются на неподвижную поверхность. В качестве дополнительного упругого элемента с реализуемой жесткостью k0 используется также пневмобаллон 6.
Для организации движения управляемого упругого элемента 6 жесткостью k0 в рабочем пространстве между точками крепления упругих элементов k1 и k2 применяются направляющие 3 и 4, закрепленные на опорной поверхности 1 и рабочем органе 2. По направляющим 3, 4 перемещается пневмоблок с управляемой жестокостью k0 и возможностями фиксации своего положения относительно характерной точки (т. О), соответствующей положению центра масс механической колебательной системы. Блок, в свою очередь, состоит из двух передвигающихся опор 8 и 10, которые могут перемещаться по направляющим 3 и 4 с помощью синхронно работающих ходовых винтов 9, 11, приводимых в движение электрическими сервоприводами 12, 13. Необходимая корректировка жесткости k0 управляемого пневматического упругого элемента осуществляется с помощью компрессора 14, установленного на нижней перемещающейся опоре 8. Компрессор 14 через управляемые клапаны 15, 16, 17 обеспечивает изменение и поддержание необходимой жесткости пневмобаллона 6.
Управление работой системы в автоматическом режиме обеспечивается блоком управления 20, установленном на неподвижной опорной поверхности 1. Блок управления связан с датчиками 18 и 19, фиксирующими амплитуды колебаний рабочего органа по координатам у1 и у2. Датчики 18, 19 имеют коммуникационные связи 25, 26 с блоком управления 20. Сервоприводы 12, 13 также имеют коммуникационные связи 27, 28 с блоком управления 19. Управление компрессором и пневмобаллоном осуществляется коммуникациями 23, 29, 30.
Блок управления 20 имеет микропроцессор, отрабатывающий алгоритм управления движением пневмобаллона по направляющим, что создает возможности изменения приведенной жесткости системы в целом, для поддержания режима колебаний рабочего органа вибростенда в условиях, когда отношение амплитуд колебаний у1 и у2 сохраняется равным единице. Вибрации стенда создаются вибрационными синфазными гармоническими вибровозбудителями 21, 22.
Вибрационная технологическая машина обеспечивает возможности поднастройки параметров колебательных движений рабочего органа в тех случаях, когда в силу внешних возмущений, вызванных изменениями массоинерционных параметров системы, происходит выход из условий динамического состояния рабочего органа, когда отношение амплитуд колебаний у1 и у2 равно единице. В этом случае алгоритмы блока управления вносят коррективы в положение пневмоблока относительно центра массЮ что определяется расстоянием между т. О (центр рабочего органа) и вертикальной осью пневмоблока; движение осуществляется с помощью сервоприводов, синхронно перемещающих верхние и нижние части пневмоблока.
В случае необходимости отработка алгоритма стабилизации режима работы вибрационной технологической машины производится путем внесения соответствующих коррекций величины жесткости пневмобаллона за счет подключения пневмосистемы, имеющей управляемые выпускные дроссели и компрессор для установления необходимого давления в пневматическом упругом элементе. Теоретическое обоснование работы системы прилагается.
Теоретическое обоснование технологических аспектов способа настройки динамического состояния технологической вибрационной машины и устройства для его реализации
Расчетная схема вибрационной технологической машины, принципиальные особенности которой были приведены на фиг. 1, может быть представлена в виде механической колебательной системы с двумя степенями свободы, что приводится на рис. 1.
Рабочий орган вибрационной технологической машины (рис. 1) состоит из твердого тела массой М и моментом инерции J. Центр масс системы находится в т. О. Твердое тело опирается на три упругих элемента с жесткостями k1, k0, k2. Точки крепления элементов с опорной поверхностью обозначены соответственно тт. А1, В1, С1. Точки крепления упругих элементов k1, k0, k2 с рабочим органом (твердое тело (М, J)) соответственно обозначены как тт.А, В и С. Внешние гармонические синфазные силовые воздействия приложены в тт. А и С.Движение системы может быть описано в системах координат у1, у2 и у0, ϕ, связанных с неподвижным базисом. Между системами координат имеются соотношения

где  - длины плеч, определяющие положение центра масс - т. О;
- длины плеч, определяющие положение центра масс - т. О;  - расстояние от центра масс до точки закрепления упругого элемента k0;
- расстояние от центра масс до точки закрепления упругого элемента k0;

Система обладает линейными свойствами и совершает малые колебания относительно положения статического равновесия; силы сопротивления на предварительной стадии расчетов полагают исчезающе малыми.
1. Для вывода дифференциальных уравнений движения используются известные подходы, например, как это изложено в работах [1, 2].
Запишем выражения для кинетической и потенциальной энергий системы в координатах у1 и у2


Выражение (3) можно представить также в виде: 
где 
2. Математическая модель системы в координатах у1 и у2 представляет собой систему двух обыкновенных дифференциальных уравнений 2-го порядка с постоянными коэффициентами


Используя преобразования Лапласа при нулевых начальных условиях [1,2], систему уравнений (5), (6) можно представить в операторной форме 

где р=jω - комплексная переменная (j=√-1), значок  над переменной означает ее изображение по Лапласу [1].
над переменной означает ее изображение по Лапласу [1].
3. На основе уравнений (6), (7) может быть построена структурная математическая модель системы в виде структурной схемы эквивалентной в динамическом отношении системы автоматического управления, как показано на рис. 2.
Из структурной схемы на рис. 2 следует, что структурная математическая модель системы состоит из двух парциальных блоков, соединенных между собой звеном с массоинерционными и упругими свойствами.
На частоте

связь между парциальными частотами исчезает и парциальные блоки могут совершать движения, не оказывая влияния друг на друга.
4. Передаточные функции системы могут быть найдены из структурной схемы на рис. 2; для упрощения выкладок принимается, что между внешними силовыми воздействиями существует связь, определяемая условием

где α - коэффициент связности внешних силовых воздействий; α - может принимать нулевые, отрицательные и положительные значения.
5. Таким образом при α≠0 (положительные значения) передаточные функции системы принимают вид: 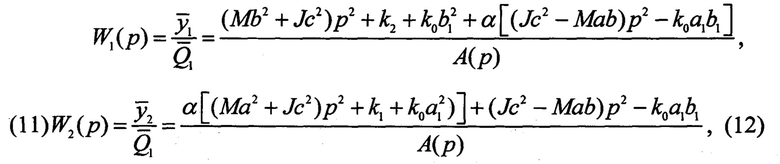

где

- является частотным характеристическим уравнением системы.
В общем случае, как это следует из анализа передаточных функций, в системе имеется две частоты собственных колебаний, что обеспечивает соответствующие резонансные динамические эффекты. Кроме того, в системе возникают режимы динамического гашения колебаний по координатам  на частотах
на частотах  соответственно
соответственно

Частоты динамического гашения колебаний при действии двух внешних силовых факторов отличаются от параметров динамического гашения колебаний при действии одного силового фактора. Отметим, что в системе с одним возмущением режим динамического гашения наблюдается только по одной координате, которая «обнуляется» на частоте динамического гашения колебаний. По второй координате динамическое гашение колебаний не наблюдается.
При этом частота динамического гашения колебаний совпадает с парциальной частотой соответствующего блока, координата которого «не обнуляется», то есть находится в движении.
При действии одновременно двух силовых факторов режимы динамического гашения колебаний возникают по двум координатам. При этом, частота динамического гашения колебаний определяется из уравнения, получаемого при «занулении» полинома числителя передаточной функции. Таким образом режимы динамического гашения колебаний принимают обобщенные значения.
В реализациях вибрационных технологических процессов большое значение имеют амплитудно-частотные характеристики системы и все необходимые данные могут быть получены из соответствующих передаточных функций.
6. При рассмотрении динамических состояний технологических вибрационных машин, однородное вибрационное поле с одинаковыми амплитудами колебаний всех точек рабочего органа могут быть рассмотрены при анализе передаточных функций межпарциальных связей W12(p). При этом отношении амплитуд колебаний координат  становится равным единице, можно получить соотношения (или условия), определяющие возможности настройки соответствующих параметров при изменении условий работы вибростенда. Компенсация отклонений параметров системы и возвращение ее к режиму отсутствия угловых колебательных движений на различных частотах может быть получено из условия
становится равным единице, можно получить соотношения (или условия), определяющие возможности настройки соответствующих параметров при изменении условий работы вибростенда. Компенсация отклонений параметров системы и возвращение ее к режиму отсутствия угловых колебательных движений на различных частотах может быть получено из условия

После преобразований (17) получим выражение

Принимая для примера α=1, выражение (18) упрощается, что позволяет найти

Задаваясь значениями частоты р2=-ω2, которая соответствует отношению амплитуд колебаний  равным единице, можно найти искомое значение как настроечного параметра. Частота движения рабочего органа вибрационной технологической машины при
равным единице, можно найти искомое значение как настроечного параметра. Частота движения рабочего органа вибрационной технологической машины при  определяется выражением (15). Реализация технологического процесса при возможных отклонениях массоинерционных параметров при осуществлении необходимых режимов динамических состояний при фиксированных коэффициентах связности а и частотах «зануления» угловых колебаний может быть обеспечена выбором Соответствующие алгоритмы управления системой автоматического управления состоянием технического объекта определяются на основе соотношений, приведенных выше.
определяется выражением (15). Реализация технологического процесса при возможных отклонениях массоинерционных параметров при осуществлении необходимых режимов динамических состояний при фиксированных коэффициентах связности а и частотах «зануления» угловых колебаний может быть обеспечена выбором Соответствующие алгоритмы управления системой автоматического управления состоянием технического объекта определяются на основе соотношений, приведенных выше.
Библиография
1. Пановко Г.Я. Лекции по основам теории вибрационных машин и технологий. М.: МГТУ им. Баумана, 2008. - 192 с.
2. Копылов Ю.Р. Динамика процессов виброударного упрочнения: монография / Воронеж: ИПЦ «Научная книга», 2011. - 569 с.
3. Бабичев А.П. Вибрационная обработка деталей в абразивной среде. М.: Машиностроения. 1968-92 с.
4. Вайсберг Л.А. Вибрационное грохочение сыпучих материалов. Моделирование процессов и технологический расчет грохотов / Л.А. Вайсберг, Л.Г. Рубисов // Механобр. СПБ. 1994. - 45 с.
5. Быховский И.И. Основы теории вибрационной техники / И.И. Быховский. - М.: Машиностроение, 1968. - 362 с.
6. Пнёв А.Г. Обеспечение прочности элементов конструкций из композиционных материалов с учетом межслойных дефектов / авт.-т дис. канд. техн. наук. Иркутск. 2012.- 164 с.
7. Елисеев С.В. Прикладной системный анализ и структурное математическое моделирование / С.В. Елисеев. - Иркутск: ИрГУПС, 2018.
8. Ганиев Р.Ф. Волновые машины и технологии (Введение в волновую технологию). Москва, научно-издательский центр «Регулярная и хаотическая динамика», 2008, - 192 с.
9. Кашуба В.Б., Елисеев С.В., Большаков Р.С Динамические реакции в соединениях элементов механических колебательных систем. Новосибирск: Наука. 2016.-331 с.
10. Елисеев С.В. Прикладной системный анализ и структурное математическое моделирование (динамика транспортных и технологических машин: связность движений, вибрационные взаимодействия, рычажные связи): монография - Иркутск: ИрГУПС, 2018. - 692 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| Способ коррекции динамического состояния рабочего органа технологической вибрационной машины с вибровозбудителем на упругой опоре и устройство для его реализации | 2019 |
|
RU2728886C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2019 |
|
RU2734839C1 |
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |
| Устройство формирования специфических режимов динамического состояния рабочего органа вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2756393C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ СОСТОЯНИЕМ ВИБРАЦИОННОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2017 |
|
RU2693711C2 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| Устройство для формирования вибрационного перемещения рабочей среды | 2021 |
|
RU2773825C1 |
Изобретение относится к области машиностроения. Возбуждают колебания рабочего органа вибрационной технологической машины и регистрируют смещение координат движения. Вводят в систему дополнительный вибровозбудитель и пневматический упругий элемент. Посредством изменения положения пневматического упругого элемента относительно центра масс системы элемента и давления в нем регулируют приведенную жесткость системы. Устройство содержит твердое тело на упругих опорах, вибровоздбудитель, датчики и дополнительный регулируемый упругий элемент. Дополнительный упругий элемент выполнен в виде пневмобаллона. Автоматическая система поднастройки регулирует параметры пневмобаллона. Достигается возможность настройки динамического состояния объекта за счет изменения приведенной жесткости системы. 2 н.п. ф-лы, 3 ил.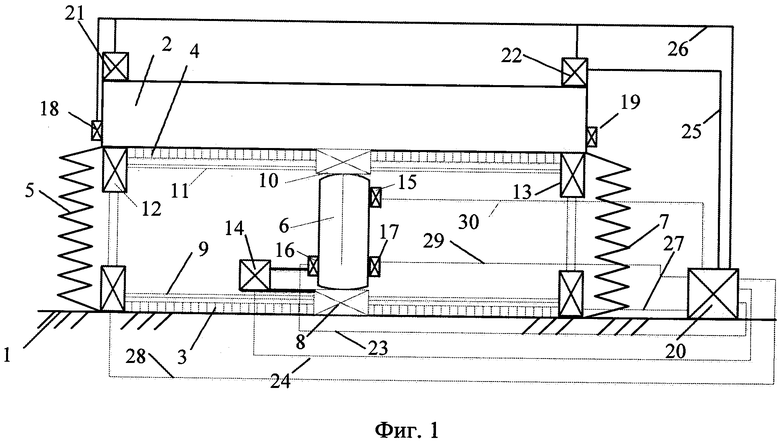
1. Способ настройки динамического состояния вибрационной технологической машины, включающий возбуждение колебаний рабочего органа вибрационной технологической машины и регистрацию смещений координат движения вибрационной технологической машины, отличающийся тем, что для получения режима стабилизации колебательного движения при обнулении угловых вибраций рабочего органа вводят в систему дополнительный вибровозбудитель и пневматический упругий элемент, причем при помощи изменения положения пневматического упругого относительно центра масс системы элемента и давления в нем регулируют приведенную жесткость системы.
2. Устройство для реализации способа настройки динамического состояния вибрационной технологической машины, содержащее твердое тело на упругих опорах, вибровозбудитель, датчики и дополнительный регулируемый упругий элемент, отличающееся тем, что дополнительный упругий элемент представляет собой пневмобаллон, регулирование параметров которого осуществляется за счет автоматической системы поднастройки, основанной на применении встроенного компрессора, системы управляемых дросселей и возможностей перемещения вертикальной оси блока относительно центра масс за счет движения опорных элементов по направляющим, закрепленным как на опорной поверхности, так и на рабочем органе с возможностями равномерного перемещения вертикальной оси пневмобаллона на определенное ей расстояние относительно центра масс системы с помощью синхронно работающих сервоприводов и ходовых винтов.
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
| Дисковый питатель погрузчика | 1960 |
|
SU136112A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

