Предлагаемое изобретение относится к вибрационной технике и может быть применено при совершенствовании вибрационных технологических машин различного назначения.
Вибрационные технологические машины получили широкое распространение в различных отраслях отечественной промышленности. Во многих технологических процессах вибростенды используются для генерации вибрационных движений гранулированный рабочей среды, которая взаимодействует с поверхностями обрабатываемых деталей, создавая эффекты модификации свойств поверхностных слоев, контактирующих с рабочей средой [1]. Вибрации рабочих органов используются для процессов вибрационной транспортировки, разделения сыпучих сред по фракциям, перемещения и ориентации деталей в процессах автоматизированной сборки изделий [2] и др. Движение сыпучих рабочих сред, перемещение деталей и узлов требует формирования определенных динамических состояний, связанных с учетом особенностей распределения амплитуд колебаний точек рабочего органа по его длине, что связано с созданием, настройкой и формированием вибрационного поля рабочего органа вибрационной технологической машины.
При формировании условий динамического взаимодействия рабочей среды и обрабатываемого изделия используются специфические формы движения рабочих органов с проявлениями режимов динамического гашения колебаний, наличием узлов (или центров) колебаний, связности движений по нескольким координатам и др.
Для расширения возможностей использования эффектов вибрационных взаимодействий широкое распространение получили подходы в разработках конструктивно-технических решений эффектов от введения дополнительных динамических связей различной природы (рычажные механизмы и зубчатые механизмы, устройства для преобразования движения и др.).
В большинстве случаев вибрационные технологические машины имеют соответствующие электромеханические, гидравлические, пневматические устройства для возбуждения колебаний рабочих органов обычно реализуется как гармонические синфазные воздействия (если больше одного) одной частоты, создающих малые колебания объекта относительно положения статического равновесия или установившегося стационарного движения, поэтому в качестве расчетных схем вибрационных технологических машин рассматриваются расчетные схемы в виде механических колебательных систем с несколькими (обычно двумя) степенями свободы.
Обеспечение высоких показателей производительности и динамического качества требует достаточно сложных конструктивно-технических решений, обладающих возможностями коррекции и настройки динамических состояний.
Такие задачи возникают в связи с изменениями нагрузок рабочих органов, распределении массо-инерционных параметров, вызванных перемещениями среды и др., что требует соответствующих мер по корректировке, настройке или формированию соответствующим образом динамических состояний.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известен способ [Елисеев С.В., Елисеев А.В., Каимов Е.В., Нгуен Д.Х., Выонг К.Ч. «Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления», 2624757, МПК F16F 15/02, приоритет 06.07.2017], включающий введение в конструктивно-техническую схему системы устройства для преобразования движения несамотормозящегося винтового механизма с гайкой-маховиком. Генерируют дополнительные стабилизирующие движения рабочего органа для обеспечения возможности регулирования и настройки вибрационной системы. Устройство генерирует управляющее воздействие в определенной точке рабочего органа вибростенда. Точка приложения усилия на рабочий орган имеет возможность изменяться в результате перемещения конструктивного блока вдоль рабочего органа с помощью синхронно работающих двух электроприводов. Электроприводы обеспечивают перемещение верхней и нижней частей конструктивно-технического блока с помощью ходовых винтов. Информация с датчиков, контролирующих вибрационное состояние и системы, поступает в специальный программный блок. Достигается упрощение регулировки режимов работы.
К недостаткам можно отнести сложность конструкции и системы управления динамическим состоянием вибрационной машины.
Известно изобретение [Вайнберг А.А., Гросул Л.И., Киржнер И.Л. «Вибрационный сепаратор», 2043173, МПК В07В 1/40, приоритет 10.09.1995], представляющее собой вибрационный сепаратор, содержащий верхний рабочий корпус, нижний рабочий корпус, связанный с приводом, отличающийся тем, что верхний и нижний рабочие корпуса соединены посредством изменяемых по длине шарнирных подвесок, в средних частях которых закреплены опоры, поднимающие общий центр тяжести рабочих корпусов при их отклонении от положения равновесия.
Недостатками рассматриваемого аналога являются отсутствие описания математического описания действия предложенного устройства, а также сложность регулирования.
За прототип принимается устройство для вибрационной абразивной обработки цилиндрических деталей [Матегорин Н.В., Бабичев А.П., Мотренко П.Д., Чумаченко Г.В. «Устройство для вибрационной абразивной обработки цилиндрических деталей», 74333, МПК В24В 31/067, приоритет 27.06.2008], содержащее основание, на котором посредством пружин установлен контейнер с инерционным вибратором, снабженный средствами для загрузки и выгрузки деталей, внутри контейнера установлено средство для транспортировки деталей в процессе абразивной обработки, содержащее поярусно установленные друг под другом транспортные каналы, отличающееся тем, что средство для транспортировки деталей в процессе абразивной обработки содержит, по крайней мере, два съемных параллельных и наклонных к горизонтальной плоскости рабочих транспортных лотка, выполненных в форме прямоугольного желоба, дно которого снабжено абразивным покрытием, между рабочими транспортными лотками установлен транспортный лоток, имеющий угол наклона к горизонтальной плоскости в сторону, противоположную наклону рабочего транспортного лотка, а каждый рабочий транспортный лоток соединен с системами подачи и отвода смазочно-охлаждающей жидкости (СОЖ).
К основным недостаткам прототипа можно отнести сложность управления системой параметров жесткости, а также невозможность получения динамического режима при котором отсутствует вращательная компонента движения рабочего органа.
Задачей предлагаемого изобретения является настройка динамического состояния вибрационной технологической машины при помощи регулирования параметров пневмобаллонов.
Устройство формирования режимов динамического состояния рабочего органа вибрационной технологической машины, содержащее рабочий стол, приводы, упругие элементы, вибратор, отличающееся тем, что дополнительно установлены: блок управления, вибродатчики, расположенные на концах рабочее стола, два ряда пневмобаллонов, расположенных на концах рычажных механизмов, причем пневмобаллоны каждого ряда соединены между собой, с возможностью регулирования давления в них по полученной с вибродатчиков информации.
Способ формирования режимов динамического состояния рабочего органа вибрационной технологической машины, включающий создание и регулирование вибраций рабочего стола по п. 1, отличающийся тем, что колебания рабочего стола регулируют изменением давления в пневмобаллонах по информации, полученной при помощи вибродатчиков.
Суть изобретения поясняется чертежами.
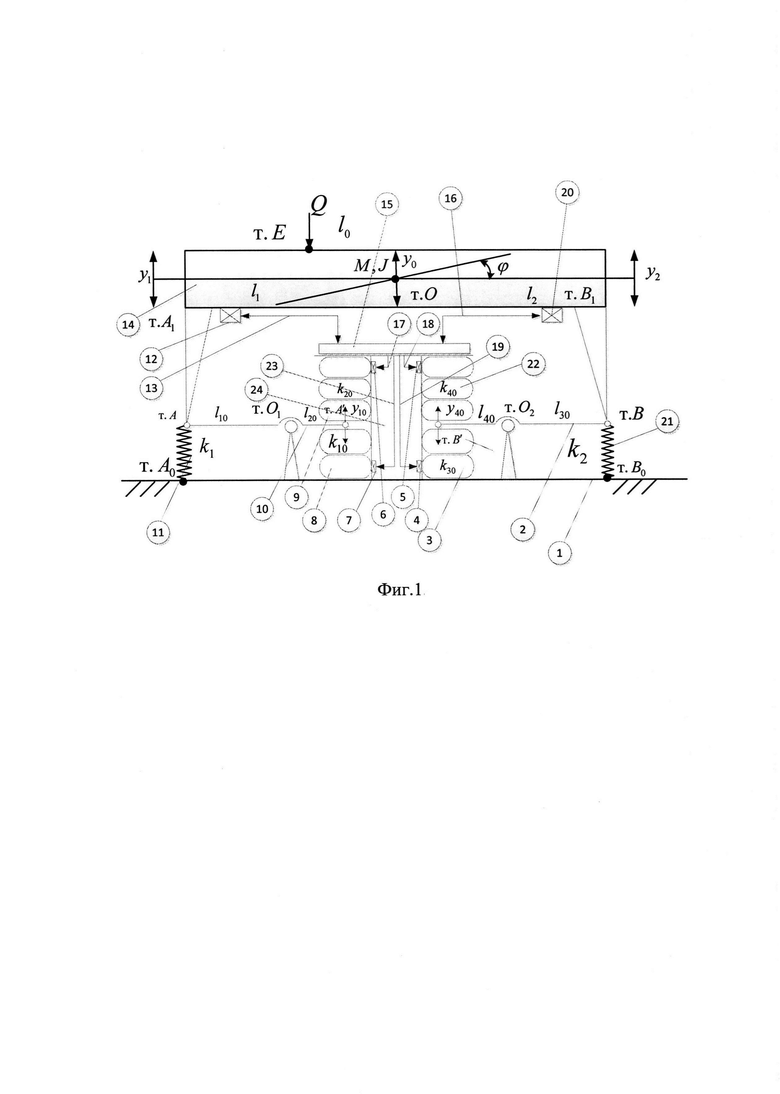
Фиг. 1 иллюстрирует принципиальную схему вибрационной технологической машины, содержащую опорную поверхность 1, рычажные механизмы 2, 10, пневмобаллоны 3, 8, 9, 22, управляемые дроссели 4, 5, 6, 7, упругие элементы 11, 21, вибродатчики 12, 20, рабочий орган 14, блок обработки информации и управления 15, коммуникации 13, 16, 17, 18, 19, 23, пневмокомпрессор 24.
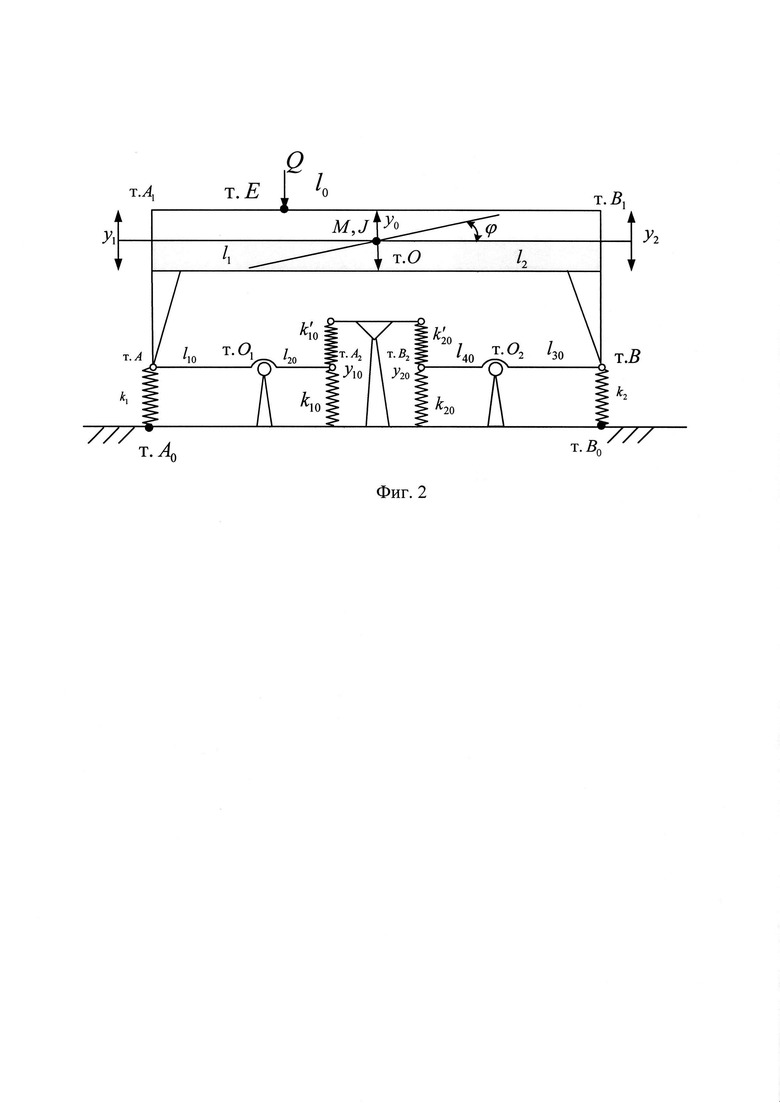
На фиг. 2 показана расчетная схема вибрационной технологической машины.
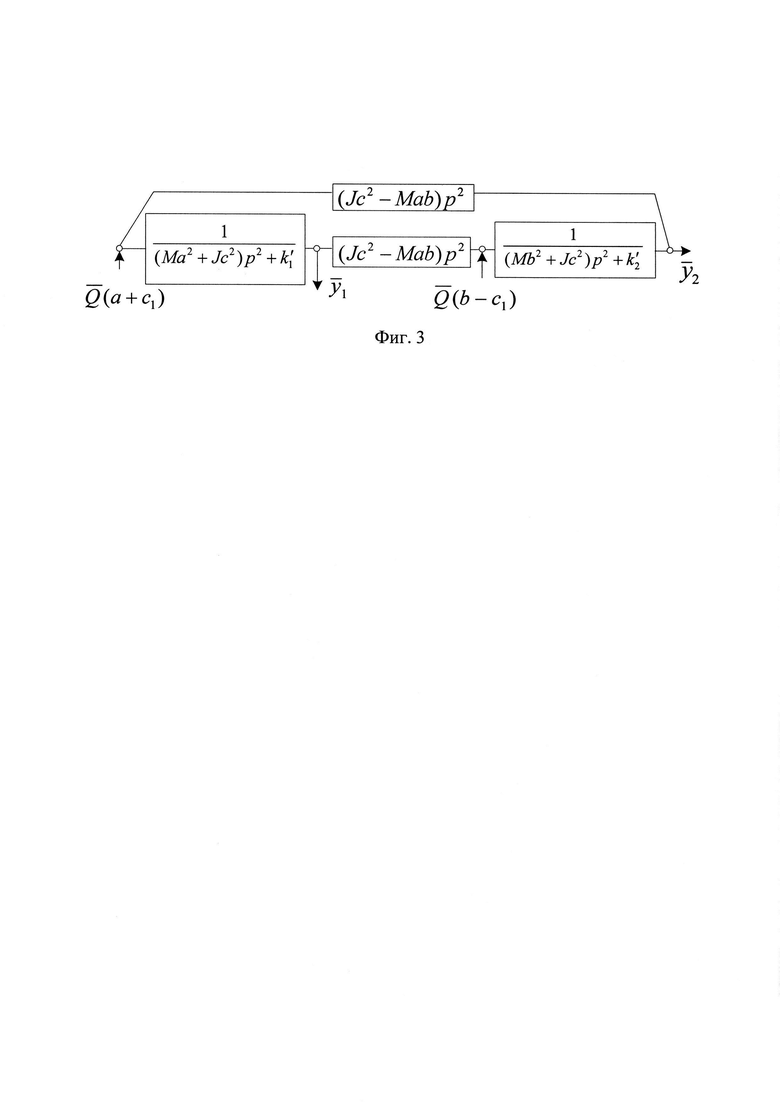
На фиг. 3 приведена структурная схема исходной системы по фиг. 2. Изобретение работает следующим образом.
Предлагаемое изобретение как способ формирования специфических режимов динамического состояния вибрационной технологической машины и устройство для его реализации осуществляется механической колебательной системой с двумя степенями свободы, имеющей в своем составе массо-инерционные, упругая механические и пневматические элементы, образующие в совокупности колебательную структуру с динамическими рычажными связями. Принципиальная схема вибрационной технологической машины переводится на фиг. 1.
Предлагаемое изобретение реализуется механической колебательной системой состоящей из рабочего органа 14 в виде твердого тела, массой Ми моментом инерции J относительно центра масс (т. О на фиг. 1), опирающиеся через пилоны в тт. А и В на рычажные механизмы 2 и 10, имеющие узлы вращения в тт. Ο1 и O2; один конец рычага 10 в т. А на упругий элемент 11 с жесткостью k1, другой конец т. Α' связан с пневмоблоками 8, 9, входящими в ограничитель вертикальных движений, связанный связанных жестко с опорной поверхностью 1. Внутри жесткого ограничителя, связанного с опорной поверхностью 1 находится пневмокомпрессор 24, обеспечивающий через дроссели 4, 5, 6 и 7 соответствующее давление (жесткость) в пневмоупругих элементах. Второй пилон в т. В опирается на рычаг 2, имеющий узел вращения в т. O2; т. В рычага опирается на упругий элемент 22, установленный в т. В0 на опорную поверхность 1; в т. В' конец рычага соединяется с пневмоблоками 3 и 22, находящимися в ограничителе движения, связанного с опорной поверхностью 1. Давление с пневмобаллонах поддерживается компрессором 24, через дроссели 4, 5, 6 и 7 и коммуникации 17, 18, 19, 23. Динамическое состояние рабочего органа регистрируется датчиками 12 и 20, связанными коммуникациями 13 и 16 с блоком настройки 15. Блок настройки 15 на основе полученной информации может обеспечить движение рабочего органа в регламентах технологического режима. Устройство для реализации способа формирования динамического состояния представляет собой систему двух рычажных механизмов с узлами вращения в тт. Ο1 и O2, позволяющих обеспечение системы упругими связями с жидкостями k10, k20, k30, k40, формируемыми пневмоблоками, закрепленными в ограничителе движения, связанным с опорной поверхностью имеющими регулируемые пневмоблоки, питаемые от компрессора, для обеспечения условий реализации динамического режима, заданного блоками настройки.
Теоретическое обоснование
Принимая во внимание предположение об особенностях работы технического объекта (фиг. 1) в условиях малости колебаний относительно положения статического равновесия, линейности упругих и массо-инерционных свойств, будем рассматривать его расчетную схему в виде системы с двумя степенями свободы с сосредоточенными параметрами. Система состоит из твердого тела массой Μ и обладает моментом инерции J относительно центра масс (т. О фиг. 2). На рабочий орган (твердое тело) в т. Ε действуют силовое гармоническое возмущение Q(t); оно расположено на плече  от центра масс в т. О. Центр масс (т. О) расположен на расстоянии
от центра масс в т. О. Центр масс (т. О) расположен на расстоянии  от тт. А1 и Β1 соответственно. Рабочий орган в тт. А и В опирается на упругие элементы с жесткостями k1 и k2. Пилоны рабочего органа, в свою очередь, опираются на концы рычагов в тт. А и В. Рычажные механизмы имеют центры вращения в тт. О1 и O2. Длины плеч рычагов имеют соответственно значение
от тт. А1 и Β1 соответственно. Рабочий орган в тт. А и В опирается на упругие элементы с жесткостями k1 и k2. Пилоны рабочего органа, в свою очередь, опираются на концы рычагов в тт. А и В. Рычажные механизмы имеют центры вращения в тт. О1 и O2. Длины плеч рычагов имеют соответственно значение  В тт. А' и В' рычагов закреплены упругие пневмоблоки, жесткости которых составляют k10, k20, k30, k40. Движение системы описывается в системе координат y1, у2, а также y0 и ϕ. Для составления дифференциальных уравнений движения используется формализм Лагранжа 2-го рода [3]. В промежуточных выкладках используются соотношения, отражающие связи между параметрами системы:
В тт. А' и В' рычагов закреплены упругие пневмоблоки, жесткости которых составляют k10, k20, k30, k40. Движение системы описывается в системе координат y1, у2, а также y0 и ϕ. Для составления дифференциальных уравнений движения используется формализм Лагранжа 2-го рода [3]. В промежуточных выкладках используются соотношения, отражающие связи между параметрами системы:


Запишем выражения для кинетической и потенциальной энергии рассматриваемой системы:


Запишем систему дифференциальных уравнений во временной области.


где 
Для перевода уравнения (4), (5) в операторную форму используются интегральные преобразования Лапласа для нулевых начальных условиях [3]. При этом исходная система уравнений (4), (5) преобразуется к виду:


где  - комплексная переменная
- комплексная переменная  значок «-» над переменной соответствует изображению по Лапласу [3].
значок «-» над переменной соответствует изображению по Лапласу [3].
Выражения (7), (8) определяют структурную математическую модель исходной системы, приведенной как принципиальная схема на фиг. 1 и как расчетная схема на фиг. 2. Структурная математическая модель, по своей физической сути, представляет собой структурную схему эквивалентной, в динамическом отношении, системы автоматического управления. Структурная схема системы приведена на фиг. 3. Используя структурную схему, запишем выражения для передаточных функций системы при силовом возмущении.
Структурная схема системы, как следует из фиг. 3, состоит из двух парциальных систем, соединенных звеном с инерционной связью. Силовое возмущение имеет два входа: 
Передаточные функции имеет вид:


где А(р) является характеристическим частотным уравнением (использоваться для определения частот собственных колебаний) -

Передаточные функции системы, определяемые выражениями (9), (10) по своей физической сущности, отображают изменения податливости смещений в тт. А1, В1 при соответствующих частотах. Чем больше податливость, тем значительнее будет ее отклонение (смещение) при действии периодической сила.
Частоты динамического гашения по координатам y1, y2 имеют вид

При частоте  координата у1 обнуляется и может рассматриваться как центр колебаний. График изменения амплитуд колебаний имеет вид треугольника с катетом, соответствующим координате у2.
координата у1 обнуляется и может рассматриваться как центр колебаний. График изменения амплитуд колебаний имеет вид треугольника с катетом, соответствующим координате у2.
При динамическом гашении колебаний по координате у2 будет наблюдаться аналогичная картина, но по другой координате.
Большой интерес представляет передаточная функция межпарциальных связей, которая определяется выражением

Физическая сущность передаточной функции межпарциальных связей несколько иная, она отражает другие динамические свойства системы.
I. Если принять, что у2/у1=1, то есть (13) можно найти значение частоты, при которой такая особенность движения проявляется:

Из (14) найдем значения частоты, при которой угловое движение исчезает, а рабочий орган совершает только вертикальные поступательные колебания:

Из (14) можно при заданных  b, c1 M и Jc2 можно найти серию значений
b, c1 M и Jc2 можно найти серию значений  (а следовательно, и значения k1, k2, k10, k20, k30, k40), при которых амплитудно-частотные характеристики межпарциальных связей будет на одной частоте, определяемой из (15), пересекаться в одной точке. Это связано с тем, что искомая частота (15) зависит от соотношения жесткостей, которое может варьироваться при прочих других параметрах.
(а следовательно, и значения k1, k2, k10, k20, k30, k40), при которых амплитудно-частотные характеристики межпарциальных связей будет на одной частоте, определяемой из (15), пересекаться в одной точке. Это связано с тем, что искомая частота (15) зависит от соотношения жесткостей, которое может варьироваться при прочих других параметрах.
II. В предыдущем случае, когда  угловое движение «обнуляется», движение рабочего органа можно рассматривать как вращение вокруг некоторого центра вращения (или узла колебаний), который находится на бесконечно большом расстоянии от рабочего органа слева и справа.
угловое движение «обнуляется», движение рабочего органа можно рассматривать как вращение вокруг некоторого центра вращения (или узла колебаний), который находится на бесконечно большом расстоянии от рабочего органа слева и справа.
Если  то, проводя аналогичные вышеприведенным выкладкам, можно найти положение центра колебаний, который будут расположен посередине длины рабочего органа. В этом случае поступательное движение «обнуляется»; остаются только угловые вибрации.
то, проводя аналогичные вышеприведенным выкладкам, можно найти положение центра колебаний, который будут расположен посередине длины рабочего органа. В этом случае поступательное движение «обнуляется»; остаются только угловые вибрации.
III. Если W12(p) или коэффициент связности координата изменяться в определенных пределах, то точка реализации режима динамического гашения в некоторой точке рабочего органа между тт. Α1 и В1. Если отношение амплитуд колебаний у2/у1 выходит за рамки -1 и+1, то центр колебания (или вращения) выходит за границы рабочего органа. В этом случае отношение амплитуд колебаний у2/у1, формируемое как сумма двух движений поступательного и углового, может быть интерпретировано как вращение твердого тела относительно соответствующим образом расположенного узла вращения (или узла колебаний).
Предлагаемое изобретение предполагает контроль за значениями координат у1, у2 рабочего органа; имеет блок обработки информации на основе микропроцессора, что позволяет в зависимости от регламента реализации технологического процесса, имея регулируемые реализация технологического процесса имея регулируемые пневмоблоки, соответствующим образом скорректировать структуру и параметры вибрационного поля технологической машины.
Источники информации
1. Копылов Ю.Р. Динамика процессов виброударного упрочнения: монография [Текст] / Ю.Р. Копылов - Воронеж: ИПЦ «Научная книга», 2011 - 568 с.
2. Елисеев А.В. Динамика вибрационных взаимодействий элементов технологических систем с учетом неудерживающих связей: монография [Текст] / В.В. Сельвинский, С.В. Елисеев, Елисеев А.В. // Новосибирск: Наука, 2015. - 332 с.
3. Елисеев С.В. Прикладной системный анализ и структурное математическое моделирование (динамика транспортных и технологических машин: связность движений, вибрационные взаимодействия, рычажные связи): монография / С.В. Елисеев; отв. ред. А.И. Артюнин. - Иркутск: ИрГУПС, 2018. - 692 с.
4. Большаков Р.С Особенности вибрационных состояний транспортных и технологических машин (динамические реакции и формы взаимодействия элементов). Новосибирск: Наука, 2020. - 411 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Устройство для формирования вибрационного перемещения рабочей среды | 2021 |
|
RU2773825C1 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| Способ корректировки распределения амплитуд колебаний рабочего органа вибрационного технологического стенда и устройство для его реализации | 2018 |
|
RU2716368C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755534C1 |
Группа изобретений относится к вибрационной технике. Устройство содержит рабочий стол, приводы, упругие элементы, вибратор и блок управления. Вибродатчики расположены на концах рабочего стола. Два ряда пневмобаллонов расположены на концах рычажных механизмов. Пневмобаллоны каждого ряда соединены между собой с возможностью регулирования давления в них по полученной с вибродатчиков информации. Способ включает создание и регулирование вибраций рабочего стола за счет изменения давления в пневмобаллонах по информации, полученной при помощи вибродатчиков. Достигается возможность настройки динамического состояния вибрационной технологической машины при помощи регулирования параметров пневмобаллонов. 2 н.п. ф-лы, 3 ил.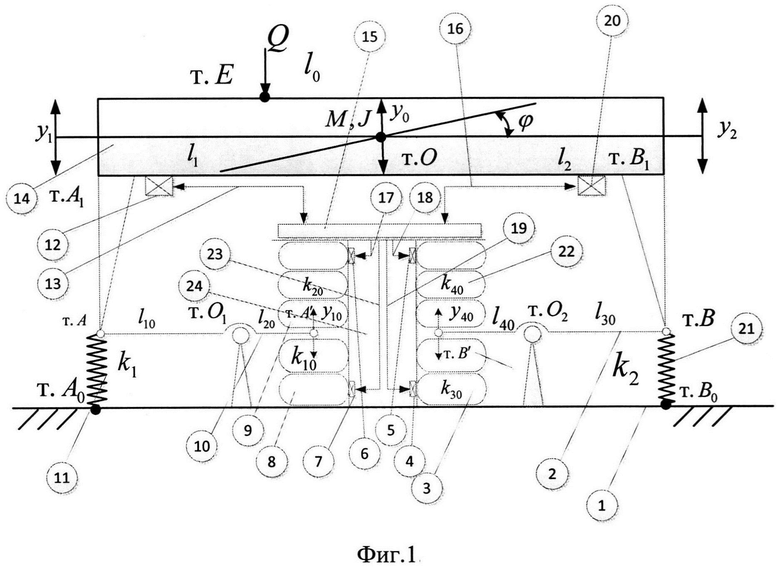
1. Устройство формирования режимов динамического состояния рабочего органа вибрационной технологической машины, содержащее рабочий стол, приводы, упругие элементы, вибратор, отличающееся тем, что дополнительно установлены: блок управления, вибродатчики, расположенные на концах рабочего стола, два ряда пневмобаллонов, расположенных на концах рычажных механизмов, причем пневмобаллоны каждого ряда соединены между собой с возможностью регулирования давления в них по полученной с вибродатчиков информации.
2. Способ формирования режимов динамического состояния рабочего органа вибрационной технологической машины, реализуемый устройством по п. 1, включающий создание и регулирование вибраций рабочего стола, отличающийся тем, что колебания рабочего стола регулируют изменением давления в пневмобаллонах по информации, полученной при помощи вибродатчиков.
| Устройство для измерений быстроменяющихся давлений | 1947 |
|
SU74333A1 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| US 5179516 A, 12.01.1993 | |||
| US 5100113 A, 31.03.1992. | |||

