ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области испытаний, в частности, к области контрольно-проверочных испытаний под нагрузкой подъемного устройства подъемника для транспортных средств.
ТЕХНИЧЕСКИЕ ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Подъемник для транспортных средств представляет собой подъемное устройство для технического обслуживания транспортного средства, которое в настоящее время используется в отделениях моторного вагона и городского железнодорожного вагона, и содержит стальную конструкцию, подъемное устройство (обычно подъемное устройство для кузова транспортного средства, подъемное устройство для тележки и т.д.) и электрическое управляющее устройство; причем подъемное устройство для кузова транспортного средства содержит среднюю опору, вертикальный опорный брус, основную часть опоры и трансмиссию; основная часть опоры расположена вертикально на верхней части вертикального опорного бруса. Подъемное устройство для тележки содержит среднюю опору, опорный брус со сгибающимися рычагами, горизонтальную балку и трансмиссию; горизонтальная балка расположена на верхней части опорного бруса со сгибающимися рычагами. Местоположения средней опоры и трансмиссии являются фиксированными, вертикальный опорный брус и опорный брус со сгибающимися рычагами расположены параллельно винту трансмиссии и перпендикулярно земле, и двигатель приводит в движение винт, местоположения вертикального опорного бруса и опорного бруса со сгибающимися рычагами могут изменяться, оставаясь параллельными винту. Подъемник для транспортных средств может использоваться для подъема собранного вагона или разобранного вагона, может заменять все тележки одновременно или заменять одну тележку и может соответствовать требованиям разборки, сборки и технического обслуживания транспортных средств.
Поскольку вагон относительно дорогостоящий, для обеспечения безопасной и надежной работы подъемника для транспортных средств, его подъемное устройство необходимо подвергнуть испытанию под нагрузкой перед тем, как подъемник покинет завод, в настоящее время не существует каких-либо отечественных или зарубежных устройств и способов для испытания под нагрузкой подъемного устройства подъемника для транспортных средств перед тем, как он покинет завод.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Для решения вышеупомянутых проблем настоящее изобретение предоставляет контрольно-проверочные систему и способ для осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств перед завершением сборки подъемника для транспортных средств, которые могут осуществлять испытание под нагрузкой подъемного устройства и проверять функционирование и статическую прочность подъемного устройства, способствуя испытанию и экономя ресурсы.
Для реализации вышеописанной цели настоящее изобретение использует следующее техническое решение.
Один вариант осуществления настоящего изобретения предоставляет контрольно-проверочную систему для осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств, которая может применяться для испытания собранного подъемного устройства подъемника для транспортных средств и которая содержит основание, причем на основании расположен опорный кронштейн, выполненный с возможностью установки подъемного устройства, подлежащего испытанию, опорный кронштейн обеспечен нагрузочным устройством для приложения усилия, вызывающего нагрузку, к подъемному устройству, подлежащему испытанию, причем нагрузочное устройство электрически соединено с управляющим устройством, которое может регулировать давление, приложенное нагрузочным устройством, согласно заданной величине.
Другой вариант осуществления настоящего изобретения предоставляет контрольно-проверочную систему для осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств, которая может применяться для испытания подъемного устройства и которая содержит основание, на основании размещаются опорный кронштейн и подъемное устройство, подлежащее испытанию; нагрузочное устройство расположено на опорном кронштейне для приложения усилия, вызывающего нагрузку, к подъемному устройству, подлежащему испытанию; нагрузочное устройство электрически соединено с управляющим устройством, которое может регулировать давление, приложенное нагрузочным устройством, согласно заданной величине. В настоящем изобретении подъемное устройство содержит основную часть опоры и вертикальную опорную стойку.
В качестве предпочтительного варианта осуществления опорный кронштейн содержит первую опорную стойку и вторую опорную стойку, обе из которых расположены на основании; горизонтальная балка расположена между первой опорной стойкой и второй опорной стойкой; подъемное устройство, подлежащее испытанию, расположено между первой опорной стойкой и второй опорной стойкой и находится под горизонтальной балкой; нагрузочное устройство установлено на горизонтальной балке и расположено между горизонтальной балкой и подъемным устройством, подлежащим испытанию. В частности, один конец основной части опоры подъемного устройства соединен с вертикальной опорной стойкой, и ее другой конец представляет собой консольный конец; нагрузочное устройство расположено между горизонтальной балкой и консольным концом.
В качестве предпочтительного варианта осуществления основание может содержать первую платформу и вторую платформу, первая платформа присоединена ко второй платформе посредством второй лестницы; вторая платформа находится над первой платформой и вблизи нагрузочного устройства. Кроме этого, подъемное устройство и опорный кронштейн установлены на первой платформе.
В качестве предпочтительного варианта осуществления нижняя часть основания может быть обеспечена опорной конструкцией, причем в качестве опорной конструкции может быть выбрана стальная каркасная конструкция. Нижняя часть опорной конструкции соединена с первой платформой посредством первой лестницы; опорная конструкция обычно расположена на земле, таким образом, оператор может пройти по лестницам между землей, первой платформой и второй платформой.
В качестве предпочтительного варианта осуществления нагрузочное устройство содержит гидравлический цилиндр, неподвижный конец гидравлического цилиндра закреплен на опорном кронштейне, поршневой конец расположен вблизи подъемного устройства, подлежащего испытанию, нижняя часть поршневого конца гидравлического цилиндра обеспечена датчиком давления, выполненным с возможностью обнаружения давления нагрузки гидравлического цилиндра, датчик давления присоединен к управляющему устройству для передачи сигнала давления, обнаруженного датчиком давления, в управляющее устройство.
В качестве предпочтительного варианта осуществления неподвижный конец гидравлического цилиндра закреплен под горизонтальной балкой, поршневой конец гидравлического цилиндра и соединение, расположенное на нижнем конце поршневого конца, находятся на стороне, ближайшей к подъемному устройству, подлежащему испытанию; датчик давления расположен под соединением, причем соединение и датчик давления соединены с возможностью перемещения посредством соединительного элемента (элементов).
В качестве предпочтительного варианта осуществления соединительный элемент разделен на первый соединительный элемент и второй соединительный элемент, оба из которых предпочтительно представляют собой конструкции в форме буквы «L»; верхний конец первого соединительного элемента закреплен на нижней части поршневого конца или на соединении, нижний конец второго соединительного элемента закреплен на датчике давления; первый соединительный элемент обеспечен первым отверстием и второй соединительный элемент обеспечен вторым отверстием, соответствующим первому отверстию; первый соединительный элемент и второй соединительный элемент соединены друг с другом путем размещения крепежного элемента в первом отверстии и втором отверстии; причем по меньшей мере одно из первого отверстия или второго отверстия представляет собой вертикально удлиненное отверстие. Предпочтительно предусмотрены два соединительных элемента, и эти два соединительных элемента особенно предпочтительно расположены симметрично относительно датчика давления.
В качестве предпочтительного варианта осуществления нижний конец датчика давления также может быть обеспечен торцевой крышкой датчика. Предпочтительно нижний конец второго соединительного элемента закреплен на торцевой крышке датчика.
В качестве предпочтительного варианта осуществления нижняя часть поршневого конца или нижняя торцевая поверхность соединения, верхняя и нижняя торцевые поверхности датчика давления, верхняя и нижняя торцевые поверхности торцевой крышки датчика и контактная поверхность подъемного устройства, подлежащего испытанию, предоставлены в виде плоскостей, соответствующих друг другу. В качестве предпочтительного варианта осуществления управляющее устройство содержит по меньшей мере модуль приема сигнала давления, выполненный с возможностью приема сигнала давления, модуль вывода сигнала давления, выполненный с возможностью вывода величины сигнала давления, и модуль регулировки давления, выполненный с возможностью регулировки давления нагрузки гидравлического цилиндра, которые электрически соединены с управляющим устройством.
В качестве предпочтительного варианта осуществления гидравлический цилиндр дополнительно обеспечен датчиком смещения, причем датчик смещения используется для обнаружения сигнала смещения гидравлического цилиндра. Верхний конец датчика смещения закреплен на неподвижном конце и его нижний конец закреплен на нижней части поршневого конца или на соединении. В этом случае управляющее устройство по меньшей мере содержит модуль приема сигнала смещения, выполненный с возможностью приема сигнала смещения, и модуль вывода сигнала смещения, выполненный с возможностью вывода величины сигнала смещения, которые электрически соединены с управляющим устройством.
В качестве предпочтительного варианта осуществления управляющее устройство электрически соединено с тензодатчиками, прикрепленными к подъемному устройству, подлежащему испытанию, причем тензодатчики образуют трехмерную розетку тензодатчиков с угловым распределением 45°, управляющее устройство содержит модуль приема, выполненный с возможностью приема величины объемного напряжения розетки тензодатчиков, вычислительный модуль, выполненный с возможностью вычисления величины основного напряжения подъемного устройства, подлежащего испытанию, согласно величинам напряжения розетки тензодатчиков, и управляющий модуль, выполненный с возможностью вывода величины основного напряжения в вычислительный модуль, модуль приема электрически соединен с вычислительным модулем, вычислительный модуль электрически соединен с управляющим модулем.
В качестве предпочтительного варианта осуществления тензодатчик расположен на вертикальной опорной стойке подъемного устройства, подлежащего испытанию, и рядом с местом соединения вертикальной опорной стойки и основной части опоры; три тензодатчика образуют одну розетку тензодатчиков, розетка тензодатчиков содержит первый тензодатчик, расположенный горизонтально, второй тензодатчик, расположенный вертикально, и третий тензодатчик, расположенный между горизонтальным направлением и вертикальным направлением, предпочтительно под углом 45° относительно двух предыдущих направлений; причем ось x, на которой расположен первый тензодатчик, направлена к консольному концу основной части опоры, ось y, на которой расположен второй тензодатчик, направлена к соединению основной части опоры и вертикальной опорной стойки, ось u, на которой расположен третий тензодатчик, расположена между осью x и осью y.
В качестве предпочтительного варианта осуществления множество опорных кронштейнов расположены бок-о-бок на основании, на каждом опорном кронштейне расположено одно отдельное нагрузочное устройство и каждое нагрузочное устройство электрически присоединено к управляющему устройству.
Другой вариант осуществления настоящего изобретения предоставляет контрольно-проверочный способ осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств, в котором используют вышеописанную контрольно-проверочную систему для осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств и который включает следующие этапы:
отправка управляющим устройством управляющего сигнала нагрузочному устройству согласно номинальной величине давления;
прием гидравлическим цилиндром нагрузочного устройства управляющего сигнала и приложение номинальной величины давления в качестве начального давления к подъемному устройству, подлежащему испытанию; непрерывное повышение гидравлическим цилиндром величины давления до величины давления, умноженной на предварительно заданную номинальную величину давления, в процессе нагружения давлением, передача датчиком давления, соединенным с гидравлическим цилиндром, по каналу обратной связи в режиме реального времени сигнала давления, приложенного гидравлическим цилиндром, в управляющее устройство для проверки величины давления нагрузки;
одновременная регулировка управляющим устройством величины приложенного давления согласно сигналу давления, полученному по обратной связи, для управления давлением нагрузки.
В качестве предпочтительного варианта осуществления способ дополнительно включает следующие этапы: при осуществлении нагрузки давлением гидравлическим цилиндром при начальной заданной величине давления обнаружение датчиком смещения начальной величины смещения гидравлического цилиндра и передача по каналу обратной связи в управляющее устройство; и при прикладывании гидравлическим цилиндром давления, достигающего величины давления, умноженной на предварительно заданную номинальную величину давления, обнаружение датчиком смещения второй величины смещения гидравлического цилиндра и передача по каналу обратной связи в управляющее устройство; вычисление управляющим устройством разности между второй величиной смещения и начальной величиной смещения и вывод разности в качестве проверки величины отклонения подъемного устройства, подлежащего испытанию.
В качестве предпочтительного варианта осуществления способ дополнительно включает следующие этапы: прием управляющим устройством сигналов напряжения розетки тензодатчиков, прикрепленной к подъемному устройству, подлежащему испытанию; вычисление вычислительным модулем управляющего устройства величины основного напряжения согласно предварительно заданным формулам для проверки напряжения подъемного устройства, подлежащего испытанию.
В качестве предпочтительного варианта осуществления на этапе проверки величины напряжения предварительно заданные формулы в вычислительном модуле имеют следующий вид:




Вычислительный модуль последовательно вычисляет величины напряжения согласно вышеописанным предварительно заданным формулам; где E — модуль упругости, ν — коэффициент Пуассона, ε — напряжение в каждом направлении розетки тензодатчиков, εmax — вычисленное максимальное напряжение, εmin — вычисленное минимальное напряжение, α0 — угол между максимальным основным напряжением и осью x, σ1 — величина напряжения, соответствующая направлению ε max, σ2 — величина напряжения, соответствующая направлению εmin.
В сравнении с известным уровнем техники настоящее изобретение обладает следующими преимуществами и полезными эффектами.
1. Контрольно-проверочная система для осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств согласно настоящему изобретению путем предоставления опорного кронштейна, выполненного с возможностью установки кузова транспортного средства или тележки и установки нагрузочного устройства на опорном кронштейне, может обеспечить реализацию контроля и проверки кузова транспортного средства или тележки, собранных по отдельности, тем самым обеспечивая удобные, простые и быстрые испытания.
2. Контрольно-проверочный способ осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств согласно настоящему изобретению может осуществлять проверку под давлением, проверку отклонения при подъеме и проверку под механическим напряжением на нагрузочном устройстве, подлежащем испытанию, тем самым уменьшая сложность испытания и затраты на испытание, а также улучшая точность испытания.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
На фиг. 1 показан вид спереди в перспективе контрольно-проверочной системы для осуществления испытаний под нагрузкой;
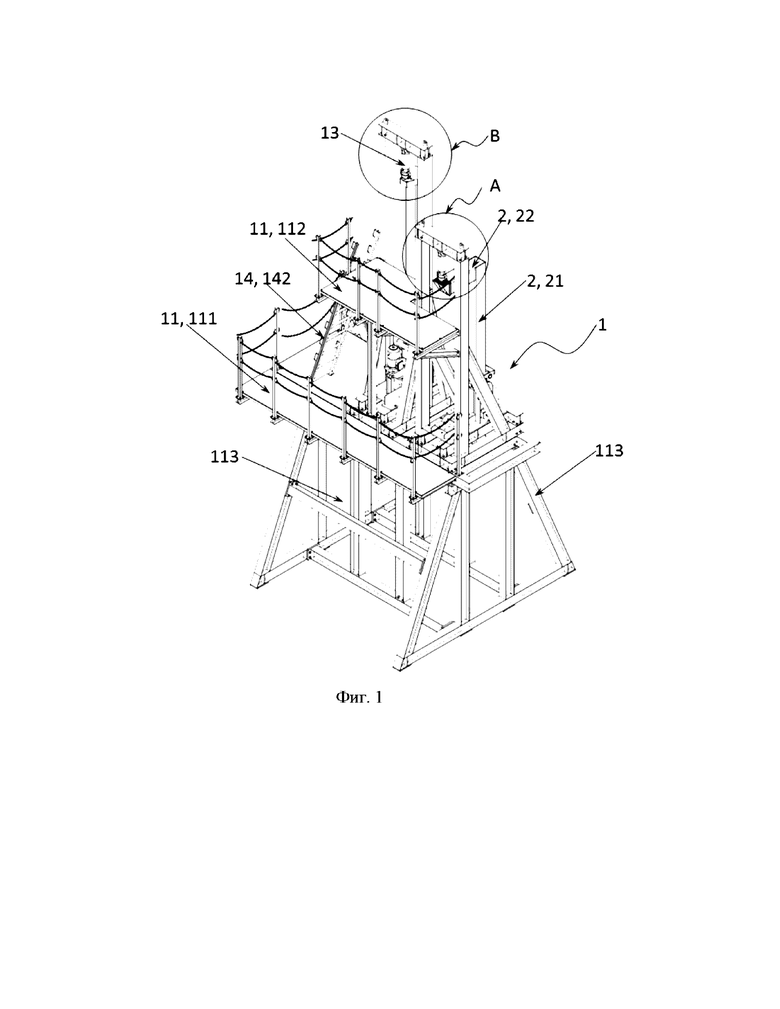
на фиг. 2 показан увеличенный вид фрагмента A по фиг. 1;
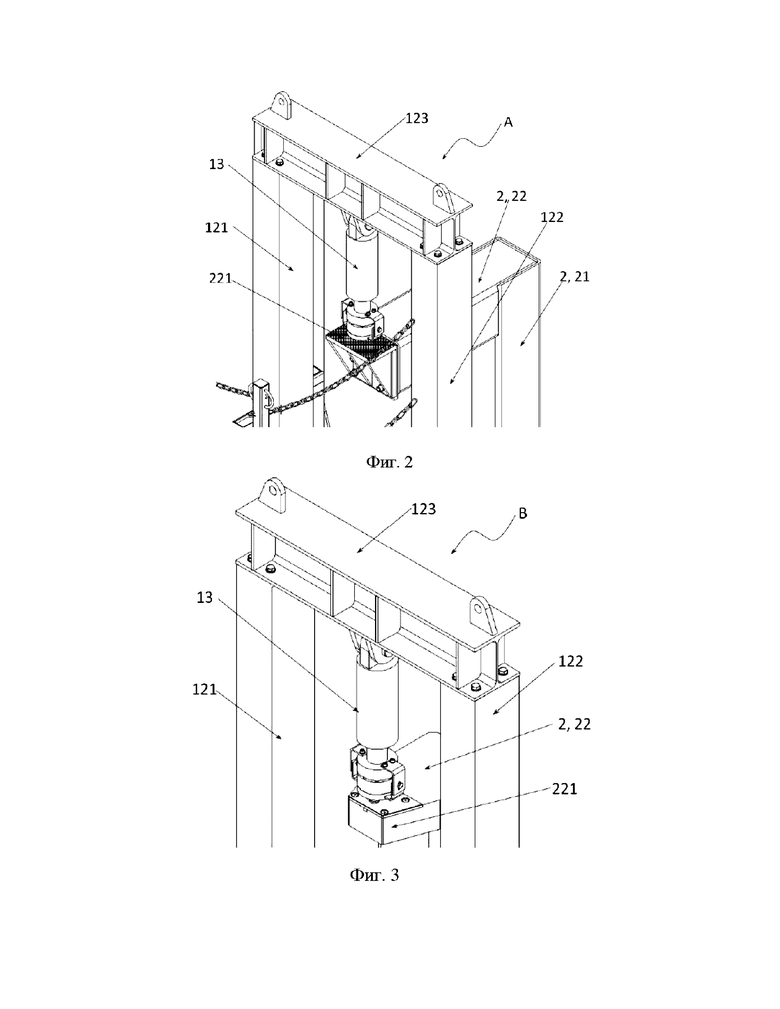
на фиг. 3 показан увеличенный вид фрагмента B по фиг. 1;
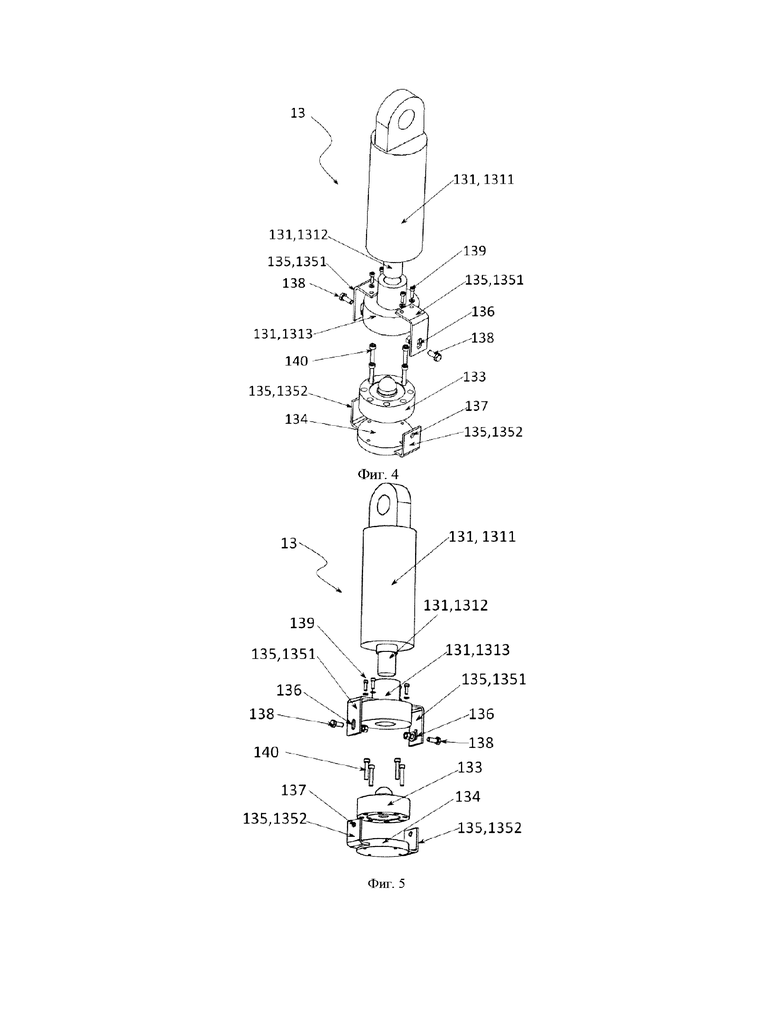
на фиг. 4 показан покомпонентный вид сверху в перспективе нагрузочного устройства;
на фиг. 5 показан покомпонентный вид снизу в перспективе нагрузочного устройства;
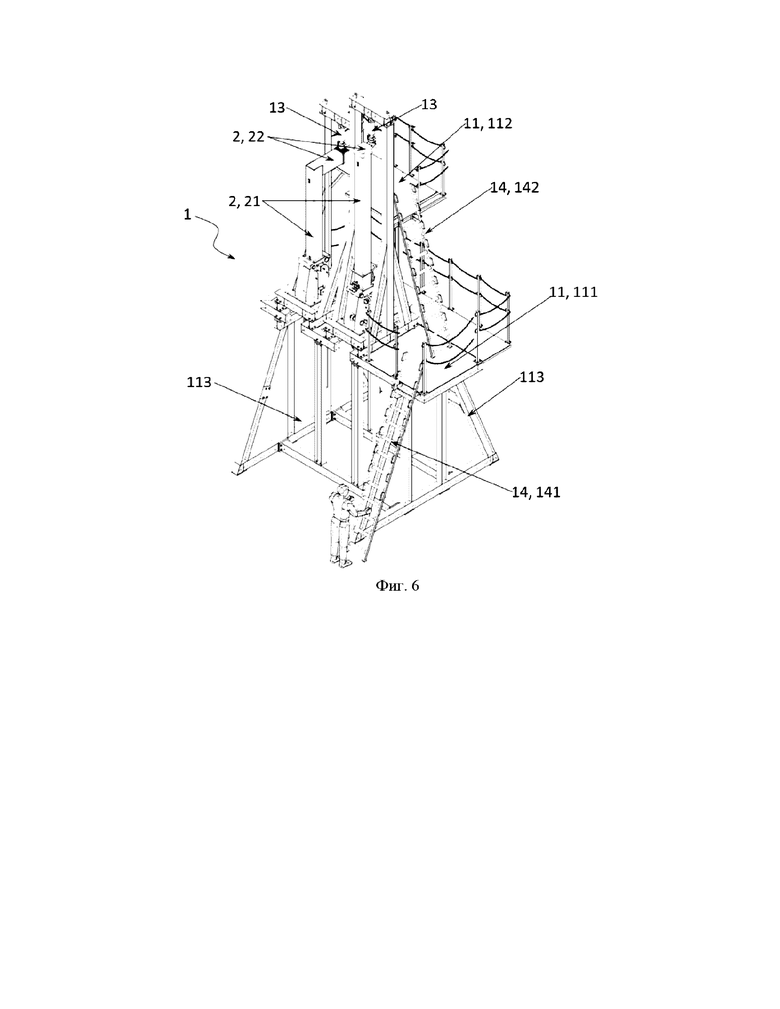
на фиг. 6 показан вид сзади в перспективе контрольно-проверочной системы;
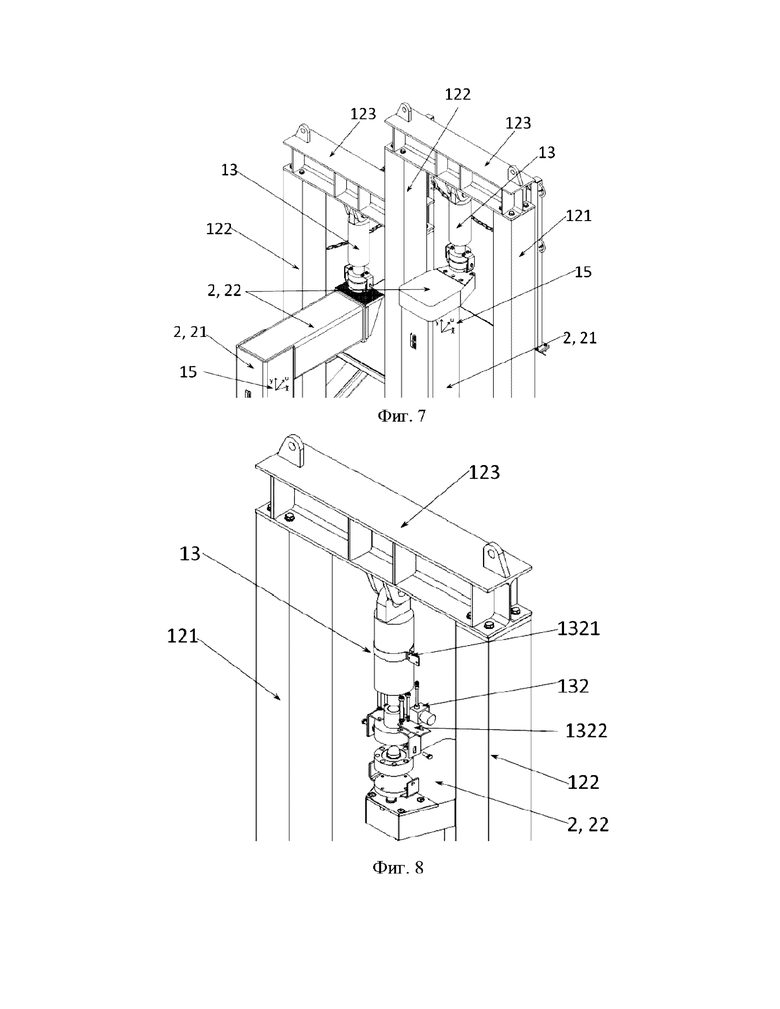
на фиг. 7 показан частичный увеличенный вид изображения по фиг. 6;
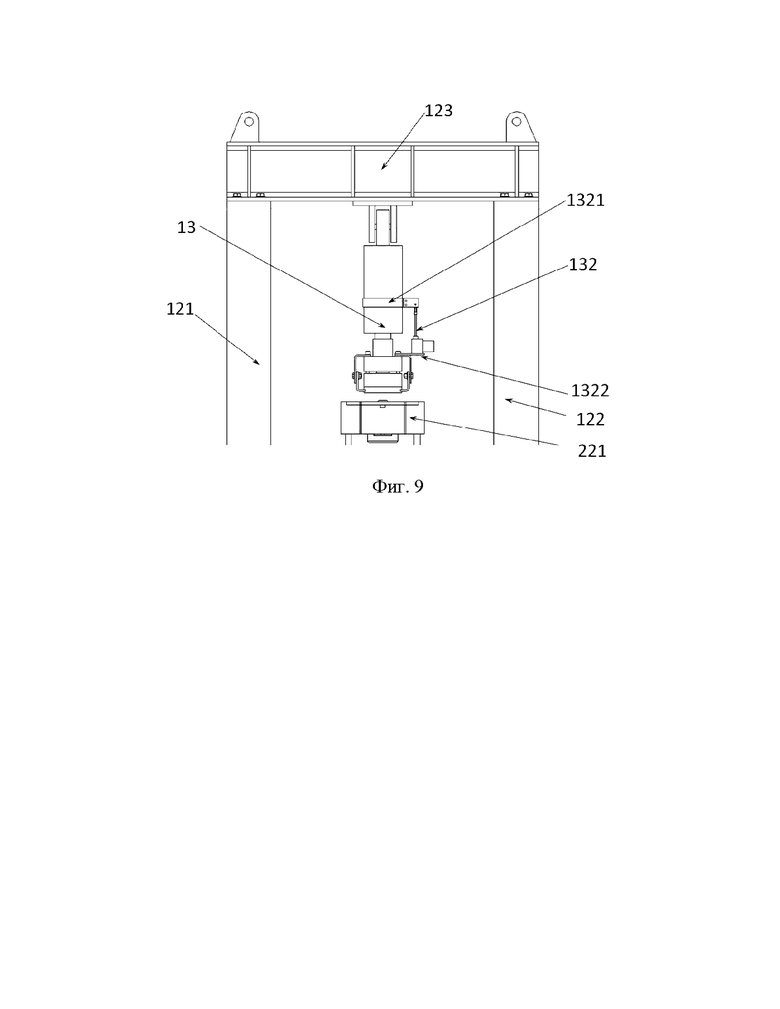
на фиг. 8 показан частичный покомпонентный вид спереди в перспективе варианта осуществления 2;
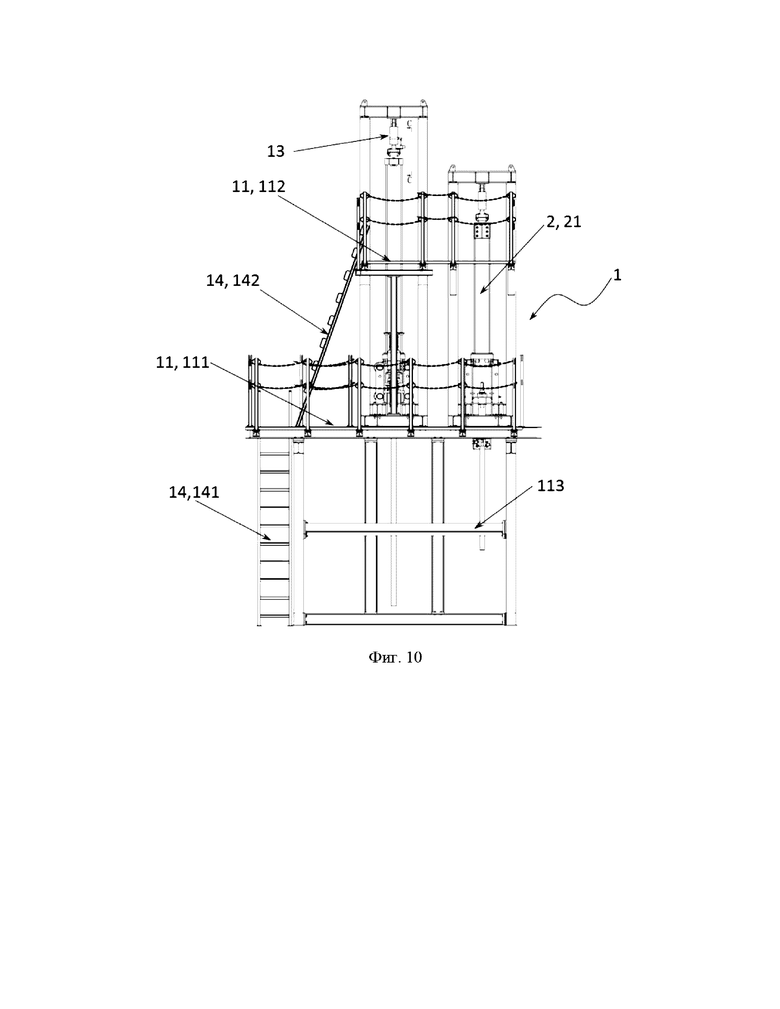
на фиг. 9 показан частичный вид спереди варианта осуществления 2;
на фиг. 10 показан вид спереди варианта осуществления 2;
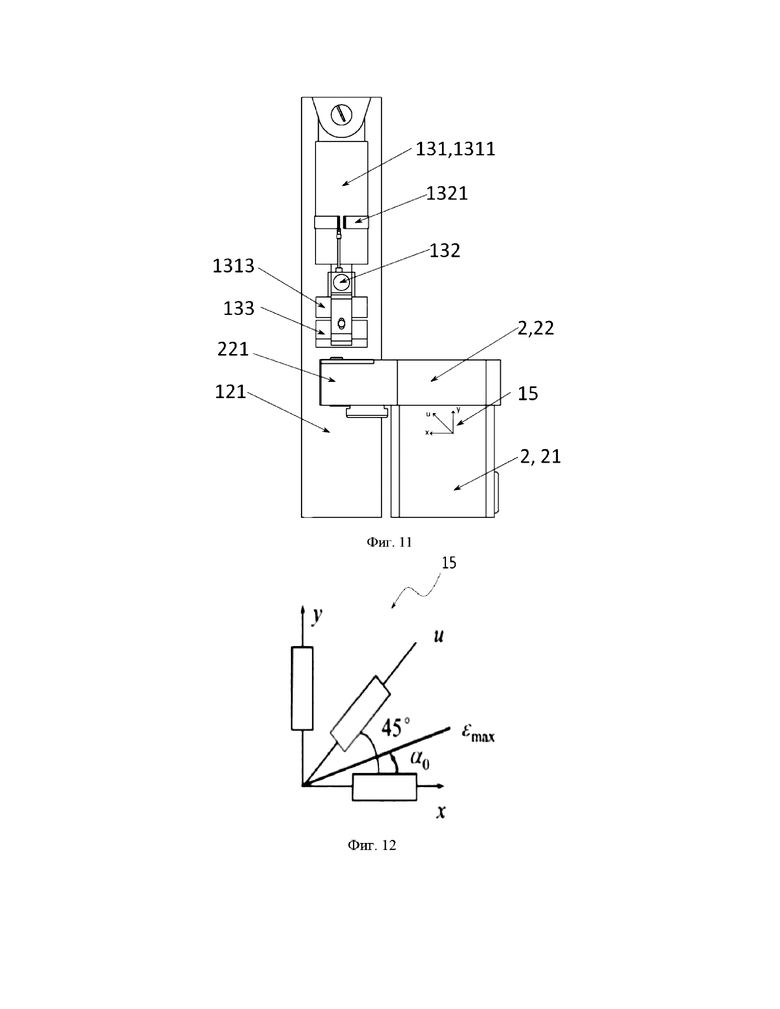
на фиг. 11 показан вид C-C по фиг. 10;
на фиг. 12 показан схематичный вид ориентации тензометра;
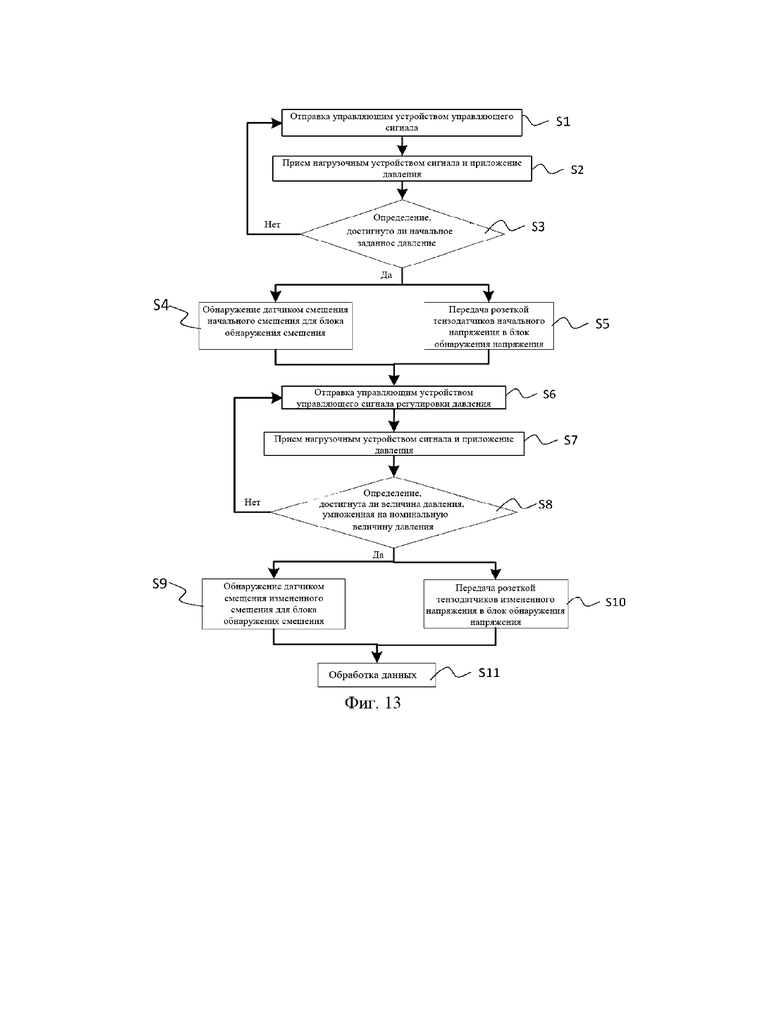
на фиг. 13 показана блок-схема контрольно-проверочного способа;
1 контрольно-проверочная система для осуществления испытаний под нагрузкой; 11 основание; 111 первая платформа; 112 вторая платформа; 113 опорная конструкция; 12 опорный кронштейн; 121 первая опорная стойка; 122 вторая опорная стойка; 123 горизонтальная балка; 13 нагрузочное устройство; 131 гидравлический цилиндр; 1311 неподвижный конец; 1312 поршневой конец; 1313 соединение; 132 датчик смещения; 1321 первый крепежный элемент; 1322 второй крепежный элемент; 133 датчик давления; 134 торцевая крышка датчика; 135 соединительный элемент; 1351 первый соединительный элемент; 1352 второй соединительный элемент; 136 первое отверстие; 137 второе отверстие; 138 первый болт; 139 второй болт; 140 третий болт; 14 лестница; 141 первая лестница; 142 вторая лестница; 15 многорешетчатый тензодатчик;
2 подъемное устройство; 21 вертикальная опорная стойка; 22 основная часть опоры; 221 консольный конец.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение будет подробно описано далее посредством иллюстративных вариантов осуществления. Тем не менее, следует понимать, что элементы, конструкции и признаки одного варианта осуществления преимущественным образом могут быть внедрены в другие варианты осуществления без дальнейшего повторения.
В описании настоящего изобретения следует отметить, что направление по высоте контрольно-проверочной системы для осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств является вертикальным направлением после установки; термины «вверх», «вниз», «вперед», «назад» и подобные обозначают относительное расположение на основании относительного расположения, изображенного на графических материалах, исключительно для удобного и упрощенного описания настоящего изобретения, но не указывают или подразумевают то, что устройства или элемент, на который ссылаются, должны иметь конкретную ориентацию или должны быть спроектированы и использованы в конкретной ориентации и, следовательно, не должны расцениваться в качестве ограничения настоящего изобретения.
Вариант осуществления 1
Как изображено на фиг. 1–7, контрольно-проверочная система 1 для осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств согласно настоящему изобретению может применяться для испытания подъемного устройства 2 подъемника для транспортных средств и содержит основание 11, на основании 11 расположен опорный кронштейн 12, на опорном кронштейне 12 расположено нагрузочное устройство 13 для приложения усилия, вызывающего нагрузку, к подъемному устройству, подлежащему испытанию; нагрузочное устройство 13 электрически соединено с управляющим устройством, которое может регулировать давление, приложенное нагрузочным устройством 13 согласно заданной величине, поскольку между нагрузочным устройством 13 и управляющим устройством предусмотрено электрическое соединение, управляющее устройство не изображено на графических материалах, поскольку электрическое соединение может расцениваться как общеизвестные сведения.
Подъемник для транспортных средств содержит подъемное устройство 2, подъемное устройство 2 может быть непосредственно установлено на основании 11, а также установлено на опорном кронштейне 12, когда выбран последний, поскольку опорный кронштейн 12 расположен на основании 11, подъемное устройство 2 может быть одновременно прикреплено к основанию 11 посредством крепежной поверхности опорного кронштейна 12. На фиг. 1 изображены два подъемных устройства 2, каждое подъемное устройство 2 содержит вертикальную опорную стойку 21 и основную часть 22 опоры, основная часть 22 опоры расположена горизонтально, один конец основной части опоры присоединен к вертикальной опорной стойке 21, а его другой конец является консольным концом 221, и конструкция подъемного устройства 2 может считаться известным уровнем техники или общеизвестными сведениями; подъемное устройство 2, изображенное справа на фиг. 1 (т.е. подъемное устройство на фрагменте A), является подъемным устройством для тележки, а подъемное устройство 2, изображенное слева (т.е. подъемное устройство на фрагменте B), является подъемным устройством для кузова транспортного средства. Тем не менее, подъемное устройство, которое можно подвергнуть испытанию, в настоящем изобретении не ограничено этими двумя типами и не ограничено контрольно-проверочной системой, обеспеченной лишь двумя подъемными устройствами, в зависимости от фактических требований могут быть предусмотрены одно или более подъемных устройств.
Как изображено на фиг. 1–6, основание 11 может содержать первую платформу 111 и вторую платформу 112, первая платформа 111 может быть присоединена ко второй платформе 112 посредством второй лестницы 142; вторая платформа 112 расположена над первой платформой 111 и вблизи нагрузочного устройства 13; таким образом, нагрузочное устройство 13 может поддерживаться на второй платформе 112 или могут быть предусмотрены компоненты нагрузочного устройства 13. Подъемное устройство 2 и опорный кронштейн 12 установлены на первой платформе 111.
Нижняя часть основания 11 может быть обеспечена опорной конструкцией 113, и в качестве опорной конструкции 113 может быть выбрана стальная каркасная конструкция для того, чтобы поддерживать всю контрольно-проверочную систему 1 для безопасного и стабильного осуществления испытаний под нагрузкой. Нижняя часть опорной конструкции 113 может быть соединена с первой платформой 111 посредством первой лестницы 141; опорная конструкция 113 обычно расположена на земле, таким образом, оператор может проходить между землей, первой платформой 111 и второй платформой 112 по лестницам 14.
Опорный кронштейн 12 может содержать первую опорную стойку 121 и вторую опорную стойку 122, горизонтальная балка 123 расположена между первой опорной стойкой 121 и второй опорной стойкой 122. Подъемное устройство 2, подлежащее испытанию, установлено на основании 11 или опорном кронштейне 12, и основная часть 22 опоры подъемного устройства 2 расположена между первой опорной стойкой 121 и второй опорной стойкой 122 и находится под горизонтальной балкой 123; нагрузочное устройство 13 установлено на нижнем конце горизонтальной балки 123 и расположено между горизонтальной балкой 123 и основной частью 22 опоры; в частности, нагрузочное устройство 13 расположено между горизонтальной балкой 123 и консольным концом 221 основной части 22 опоры (как изображено на фиг. 2, 3 и 7).
Как изображено на фиг. 2–5, нагрузочное устройство 13 содержит гидравлический цилиндр 131, неподвижный конец 1311 гидравлического цилиндра 131 (т.е. торец корпуса гидравлического цилиндра) закреплен на опорном кронштейне 12, поршневой конец расположен вблизи подъемного устройства 2, подлежащего испытанию, нижняя часть поршневого конца гидравлического цилиндра 131 обеспечена датчиком 133 давления, выполненным с возможностью обнаружения давления нагрузки гидравлического цилиндра. Датчик 133 давления присоединен к управляющему устройству для передачи сигнала давления, обнаруженного датчиком 133 давления, в управляющее устройство.
В частности, нагрузочное устройство 13 содержит гидравлический цилиндр 131, неподвижный конец 1311 гидравлического цилиндра 131 закреплен под горизонтальной балкой 123, нижний конец поршневого конца 1312 также может быть обеспечен соединением 1313, соединение 1313 может иметь форму плоского цилиндра так, что соединение может использоваться для равномерного распределения давления от гидравлического цилиндра 131, следовательно, верхний конец соединения 1313 может быть неподвижно соединен с нижней частью поршневого конца.
Датчик 133 давления расположен под соединением 1313, нижний конец датчика 133 давления также может быть обеспечен торцевой крышкой 134 датчика, например, третий болт 140 может использоваться для крепления датчика 133 давления к торцевой крышке 134 датчика; торцевая крышка 134 датчика находится в контакте с подъемным устройством 2, подлежащим испытанию, что может защищать датчик 133 давления и снижать истирание, вызванное датчиком 133 давления, находящимся в непосредственном контакте с подъемным устройством 2, подлежащим испытанию; в то же время торцевая крышка 134 датчика выполнена таким образом, чтобы соответствовать форме подъемного устройства 2, подлежащего испытанию, с тем, чтобы способствовать передаче усилия.
Нагрузочное устройство 13 дополнительно содержит соединительные элементы 135, в нем могут быть расположены два соединительных элемента 135 и предпочтительно они расположены симметрично относительно датчика 133 давления; каждый соединительный элемент 135 разделен на первый соединительный элемент 1351 и второй соединительный элемент 1352, оба из которых могут быть выбраны в форме L-образных стальных пластин; причем верхний конец первого соединительного элемента 1351 закреплен на соединении 1313, например, вторые болты 139 используются для крепления; когда соединение 1313 не предусмотрено, он может быть прикреплен на поршневом конце; нижний конец второго соединительного элемента 1352 прикреплен на торцевой крышке 134 датчика; когда торцевая крышка 134 датчика не предусмотрена, второй соединительный элемент 1352 также может быть установлен на датчике 133 давления; первый соединительный элемент 1351 обеспечен первым отверстием 136 и второй соединительный элемент 1352 обеспечен вторым отверстием 137, соответствующим первому отверстию 136; крепежный элемент, такой как первый болт 138, расположен во втором отверстии 137 и первом отверстии 136 так, что первый соединительный элемент 1351 и второй соединительный элемент 1352 присоединены друг к другу; причем по меньшей мере одно из первого отверстия 136 и второго отверстия 137 представляет собой вертикальное удлиненное отверстие, следовательно, когда давление не приложено, датчик 133 давления автоматически опускается и не вступает в контакт с соединением 1313; когда давление приложено, крепежный элемент (первый болт 138) перемещается вдоль удлиненного отверстия и таким образом соединение 132 и датчик 133 давления стыкуются и передают давление; как изображено на фиг. 2–5, первое отверстие 136 представляет собой вертикальное удлиненное отверстие так, что длина присоединенного соединительного элемента 135 может регулироваться в вертикальном направлении.
Кроме этого, для более быстрой реакции при обнаружении давления датчиком 133 давления нижняя торцевая поверхность нижней части поршневого конца или соединения 1313, верхняя и нижняя торцевые поверхности датчика 133 давления, верхняя и нижняя торцевые поверхности торцевой крышки 134 датчика и контактная поверхность подъемного устройства 2, подлежащего испытанию, предоставлены в виде плоскостей, соответствующих друг другу, таким образом, давление нагрузки гидравлического цилиндра 131 может более целенаправленно передаваться подъемному устройству 2, подлежащему испытанию.
Поскольку датчик 133 давления электрически соединен с управляющим устройством (не изображено на графических материалах), датчик 133 давления передает сигнал обнаруженного давления в управляющее устройство, управляющее устройство распознает сигнал давления, в то же время управляющее устройство дополнительно регулирует давление нагрузки гидравлического цилиндра 131 согласно величине давления, переданной сигналом давления, с тем, чтобы реализовать обнаружение давления и испытание под нагрузкой подъемного устройства, подлежащего испытанию, посредством управляющего устройства. В итоге, управляющее устройство содержит по меньшей мере модуль приема сигнала давления, выполненный с возможностью приема сигнала давления, модуль вывода сигнала давления, выполненный с возможностью вывода величины сигнала давления, и модуль регулировки давления, выполненный с возможностью регулировки давления, приложенного гидравлическим цилиндром 131, причем все эти модули электрически соединены с управляющим устройством.
Вариант осуществления 2
На основании варианта осуществления 1 и как изображено на фиг. 8–11, гидравлический цилиндр 131 дополнительно обеспечен датчиком 132 смещения, верхний конец датчика 132 смещения расположен на неподвижном конце 1311, и его нижний конец расположен на соединении 1313 (на поршневом конце, когда соединение недоступно); например, первый монтажный элемент 1321, окружающий неподвижный конец, может быть расположен на неподвижном конце 1311 для крепления верхнего конца датчика 132 смещения; второй монтажный элемент 1322 может быть расположен на соединении 1313 для крепления нижнего конца датчика 132 смещения; второй монтажный элемент 1322 может представлять собой стальную пластину и прикреплен к соединению 1313 посредством болтов, винтов и тому подобного.
Поскольку датчик 132 смещения применяется для обнаружения сигнала смещения гидравлического цилиндра 131, датчик 132 смещения в данном случае предпочтительно представляет собой датчик смещения с тяговым тросом; датчик 132 смещения электрически соединен с управляющим устройством для передачи сигнала смещения, обнаруженного датчиком 132 смещения, в управляющее устройство. В итоге, управляющее устройство по меньшей мере содержит модуль приема сигнала смещения, выполненный с возможностью приема сигнала смещения, и модуль вывода сигнала смещения, выполненный с возможностью вывода величины сигнала смещения, и все вышеуказанные модули электрически соединены с управляющим устройством.
Вариант осуществления 3
На основании варианта осуществления 1 или 2 управляющее устройство электрически соединено с тензодатчиком, прикрепленным к подъемному устройству 2, подлежащему испытанию, тензодатчик установлен на вертикальной опорной стойке 21 подъемного устройства и вблизи соединения основной части 22 опоры и вертикальной опорной стойки 21; три тензодатчика образуют розетку тензодатчиков с углом распределения 45°, как изображено на фиг. 7, 11 и 12, розетка тензодатчиков установлена на оси x, оси y и оси u под углом 45° относительно оси x, соответственно, причем ось x является поперечным направлением подъемного устройства и направлена к стороне основной части опоры 21, где находится консольный конец 221, ось y является продольным направлением подъемного устройства и направлена к соединению, ось u расположена между этими двумя осями; как видно, тензодатчик может быть прикреплен к левой и правой сторонам вертикальной опорной стойки 21 (относительно вида спереди, изображенного на фиг. 1). Управляющее устройство содержит модуль приема, выполненный с возможностью приема величины давления трех осей розетки тензодатчиков, вычислительный модуль, выполненный с возможностью вычисления величины основного напряжения подъемного устройства, подлежащего испытанию, согласно величинам давления розетки тензодатчиков, и управляющий модуль, выполненный с возможностью вывода величины основного напряжения в вычислительный модуль, модуль приема электрически соединен с вычислительным модулем и вычислительный модуль электрически соединен с управляющим модулем.
Вышеупомянутые формулы для вычисления величины основного напряжения подъемного устройства, подлежащего испытанию, вычислительным модулем имеют следующий вид:


Вычислительный модуль последовательно вычисляет величину основного напряжения согласно предварительно заданным формулам, где E — модуль упругости, ν — коэффициент Пуассона, ε — напряжение в каждом направлении розетки тензодатчиков, εmax — вычисленное максимальное напряжение, εmin — вычисленное минимальное напряжение, α0 — угол между максимальным основным напряжением и осью x (как изображено на фиг. 12), σ1 — величина основного напряжения, соответствующая направлению εmax, и σ2 — величина основного напряжения, соответствующая направлению εmin.
Из вышеуказанных формул (1), (2), (3) получают величину и направление основного напряжения и затем вычисляют величины основных напряжений σ1 и σ2 согласно формулам (4) и (5) с целью предоставления основания для оценки надежности конструкции. Вышеописанный процесс сбора данных о напряжении и вычисления напряжения может осуществляться автоматически и с высокой точностью посредством программных настроек в управляющем устройстве.
Предположим, что предоставлено n розеток тензодатчиков, при этом начальная заданная величина давления приложена к подъемному устройству, подлежащему испытанию, розетки тензодатчиков 1–n соединены последовательно для регистрации начальных величин, соответственно; когда приложенное давление непрерывно увеличивают до величины давления, умноженной на предварительно заданную номинальную нагрузку, розетки тензодатчиков 1–n, соединенные последовательно, соответственно, регистрируют и вычисляют n величин напряжения деталей, которые подлежат испытанию в данный момент.
Вариант осуществления 4
Контрольно-проверочный способ осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств использует любую из вышеописанных контрольно-проверочных систем для осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств и включает следующие этапы: отправка управляющим устройством управляющего сигнала в нагрузочное устройство согласно начальной заданной величине давления; прием гидравлическим цилиндром нагрузочного устройства управляющего сигнала и приложение начального давления к подъемным устройствам, подлежащим испытанию (S1, S2, S3); в процессе приложения давления нагрузки непрерывное увеличение гидравлическим цилиндром величины давления до величины давления, умноженной на предварительно заданную номинальную величину давления (S6, S7, S8), и в процессе приложения давления нагрузки передача датчиком давления на гидравлическом цилиндре по каналу обратной связи сигналов давления, приложенного гидравлическим цилиндром, в управляющее устройство в режиме реального времени (S8) с целью определения величины давления нагрузки; управляющее устройство одновременно регулирует величину давления на основании полученного по обратной связи сигнала давления с целью управления давлением нагрузки (S6, S7).
Контроль и проверка подъемного устройства, подлежащего испытанию, во время приложения давления нагрузки реализуются посредством обнаружения в режиме реального времени датчиком давления и PID-регулирования давления гидравлического цилиндра управляющим устройством.
В то же время контрольно-проверочный способ согласно настоящему изобретению также может проверять отклонение подъемного устройства, подлежащего испытанию, и конкретный способ проверки дополнительно включает следующие этапы: при осуществлении гидравлическим цилиндром нагрузки давлением с начальной заданной величиной давления обнаружение датчиком смещения начальной величины смещения гидравлического цилиндра и передача по каналу обратной связи в управляющее устройство, в частности, в блок обнаружения отклонения в управляющем устройстве, и последующая регистрация величины смещения в виде A (S4); при повышении гидравлическим цилиндром давления до величины давления, умноженной на предварительно заданную номинальную величину давления, обнаружение датчиком смещения второй величины смещения гидравлического цилиндра и передача по каналу обратной связи в управляющее устройство (блок обнаружения смещения), и последующая регистрация величины смещения в виде B (S9); вычисление управляющим устройством разности между второй величиной смещения и начальной величиной смещения и вывод разности в качестве проверки величины отклонения подъемного устройства, подлежащего испытанию, то есть величина, полученная вычитанием величины смещения A из величины смещения B, является именно величиной отклонения подъемного устройства, подлежащего испытанию.
В то же время в настоящем изобретении он может проверять напряжение подъемного устройства, подлежащего испытанию, и дополнительно включает следующие этапы: прием управляющим устройством сигналов напряжения розетки тензодатчиков, прикрепленной к подъемному устройству, подлежащему испытанию, вычисление вычислительным модулем управляющего устройства величины основного напряжения согласно предварительно заданным формулам для проверки напряжения подъемного устройства, подлежащего испытанию.
На этапе проверки величины напряжения предварительно заданные формулы в вычислительном модуле имеют следующий вид:
Вычислительный модуль последовательно вычисляет величину основного напряжения согласно вышеуказанным предварительно заданным формулам, где E — модуль упругости, ν — коэффициент Пуассона, ε — величина напряжения в каждом направлении тензометрической розетки и σ — величина основного напряжения.
Таким образом, величину и направление основного напряжения получают из формул (1) (2) (3), затем величины основного напряжения σ1 и σ2 вычисляют по формулам (4) (5) с целью предоставления основания для оценки надежности подъемного устройства, подлежащего испытанию. Вышеописанные процессы приема сигналов напряжения и вычисления напряжения автоматически осуществляются управляющим устройством.
В частности, когда система прикладывает давление, равное начальной заданной величине давления, множество розеток тензодатчиков (например, розетки тензодатчиков 1–n) могут быть последовательно соединены с множеством первичных измерительных преобразователей напряжения (блоков обнаружения напряжения), расположенных в управляющем устройстве, для раздельной регистрации начальных величин (S5); когда система непрерывно повышает давление до величины давления, умноженной на предварительно заданную номинальную нагрузку, розетки тензодатчиков 1–n, последовательно соединенные с множеством первичных измерительных преобразователей напряжения, регистрируют и вычисляют величины напряжения n деталей, подлежащих испытанию (S10). Первичный измерительный преобразователь напряжения является дешевым и может быть использован повторно, что снижает затраты на испытание.
Вышеописанные контрольно-проверочные система и способ для осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств могут применяться для осуществления контроля и проверки давления нагрузки, проверки отклонения подъемной колонны и проверки напряжения основных деталей, тем самым уменьшая сложность испытаний и затраты на испытания и улучшая точность испытаний.
Тем временем, в настоящем изобретении контрольно-проверочная система также может быть обеспечена сенсорным экраном, причем управляющее устройство соединено с сенсорным экраном. При необходимости отправки команды в контрольно-проверочную систему сенсорный экран можно использовать для дальнейшего управления передачей управляющего сигнала управляющего устройства; посредством сенсорного экрана более наглядно отображаются различные величины давления, величины отклонения и значение и изменение напряжения и т.д., которые легче понять интуитивно.
Вариант осуществления 5
Этот вариант осуществления используется в качестве дополнительного описания варианта осуществления 4 и, в частности, относится к фиг. 13, согласно которой контрольно-проверочный способ осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств, в частности, включает следующие этапы:
S1: отправка управляющим устройством управляющего сигнала регулировки давления в нагрузочное устройство;
S2: прием нагрузочным устройством управляющего сигнала и приложение гидравлическим цилиндром нагрузочного устройства давления к подъемному устройству, подлежащему испытанию;
S3: определение, достигло ли приложенное давление начальной заданной величины давления; если она не достигнута, возврат к этапу S1; если она достигнута, переход к следующему этапу; этот этап может быть реализован датчиком давления, передающим по обратной связи сигналы давления, приложенного гидравлическим цилиндром, в управляющее устройство в режиме реального времени;
причем этапы S1–S3 настроены на достижение начальной заданной величины давления; если величина давления, предоставленного в начале, является начальной заданной величиной давления, этап обратной связи может быть соответствующим образом упрощен;
S4: обнаружение датчиком смещения начального смещения и передача по каналу обратной связи в блок обнаружения смещения (расположенный в управляющем устройстве);
S5: передача розеткой тензодатчиков начального напряжения в блок обнаружения напряжения (расположенный в управляющем устройстве);
причем S4 и S5 могут быть выбраны в качестве параллельных этапов в соответствии с конкретными настройками устройства;
S6: отправка управляющим устройством управляющего сигнала регулировки давления в нагрузочное устройство;
S7: прием нагрузочным устройством управляющего сигнала и приложение гидравлическим цилиндром нагрузочного устройства давления к подъемному устройству, подлежащему испытанию;
S8: определение, достигло ли приложенное давление величины давления, умноженной на номинальную величину давления; если она не достигнута, возврат к этапу S6; если она достигнута, переход к следующему этапу; этот этап также может быть реализован датчиком давления, передающим по обратной связи сигналы давления, приложенного гидравлическим цилиндром, в управляющее устройство в режиме реального времени;
S9: обнаружение датчиком смещения измененного смещения и передача по каналу обратной связи в блок обнаружения смещения (расположенный в управляющем устройстве);
S10: передача розеткой тензодатчиков измененного напряжения в блок обнаружения напряжения (расположенный в управляющем устройстве);
причем этапы S9 и S10 соответствуют этапам S4 и S5; то есть без этапа S4 нет этапа S9, и без этапа S5 нет этапа S10; этапы S9 и S10 также могут выполняться параллельно;
S11: обработка полученных данных о давлении, отклонении и напряжении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР И МЕТОД КОНТРОЛЯ ДИНАМИЧЕСКИХ НАПРЯЖЕНИЙ В МНОГОСЛОЙНОМ ВИТОМ ТРОСЕ И БАРАБАНЕ В СВЕРХГЛУБОКОЙ СКВАЖИНЕ | 2016 |
|
RU2692968C1 |
| МНОГОПОЛЬНАЯ СИСТЕМА МОНИТОРИНГА И АНАЛИЗА ДЛЯ ТЕСТИРОВАНИЯ ИНТЕЛЛЕКТУАЛЬНОГО МНОГОМЕРНОГО ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ НАГРУЗКИ | 2021 |
|
RU2774053C1 |
| НАУШНИК | 2021 |
|
RU2797031C1 |
| НАУШНИК | 2021 |
|
RU2805460C2 |
| Система рулевого управления и строительная техника | 2023 |
|
RU2817072C1 |
| КОМПЛЕКСНЫЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ КОРПУСА ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2497093C2 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОТОЧЕЧНЫМ СИНХРОННЫМ ТОРМОЖЕНИЕМ МОНОРЕЛЬСОВОГО ПОДЪЕМНИКА И МЕТОД ЕЕ ИСПОЛЬЗОВАНИЯ | 2022 |
|
RU2814287C1 |
| ВСАСЫВАЮЩЕЕ УСТРОЙСТВО ДЛЯ ВЫСОКОТЕМПЕРАТУРНОГО ГАЗООХЛАЖДАЕМОГО РЕАКТОРА | 2023 |
|
RU2808591C1 |
| Способ и устройство для обхода препятствий роботом-уборщиком, носитель информации и электронное оборудование | 2021 |
|
RU2826126C1 |
| СИСТЕМА И СПОСОБ ДЛЯ НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ РОТОРНЫМ СПОСОБОМ С УПРАВЛЕНИЕМ НЕУРАВНОВЕШЕННОЙ СИЛОЙ | 2018 |
|
RU2733359C1 |
Использование: для осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств. Сущность изобретения заключается в том, что контрольно-проверочные система и способ для осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств содержат основание, на основании расположен опорный кронштейн, выполненный с возможностью установки подъемного устройства, подлежащего испытанию; опорный кронштейн обеспечен нагрузочным устройством для приложения усилия, вызывающего нагрузку, к подъемному устройству, подлежащему испытанию; нагрузочное устройство электрически соединено с управляющим устройством, которое может регулировать давление, приложенное нагрузочным устройством, согласно заданной величине. Технический результат: обеспечение возможности упрощения испытаний и увеличения точности. 2 н. и 13 з.п. ф-лы, 13 ил.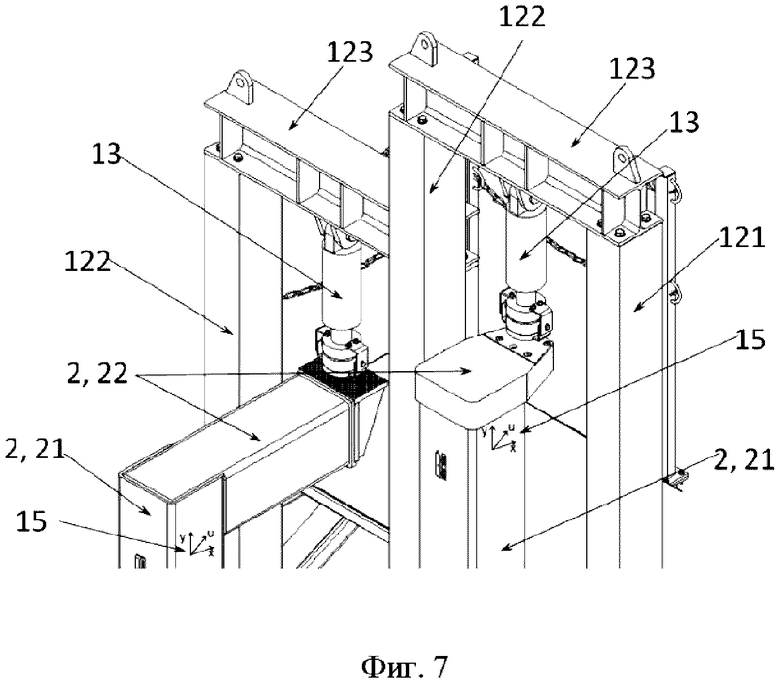
1. Контрольно-проверочная система для осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств, которая может использоваться для испытания собранного подъемного устройства (2) подъемника для транспортных средств и содержит основание (11), отличающаяся тем, что
на основании (11) расположен опорный кронштейн (12), выполненный с возможностью установки подъемного устройства, подлежащего испытанию;
опорный кронштейн (12) обеспечен нагрузочным устройством (13) для приложения усилия, вызывающего нагрузку, к подъемному устройству (2), подлежащему испытанию;
нагрузочное устройство (13) электрически соединено с управляющим устройством, которое может регулировать давление, приложенное нагрузочным устройством (13), согласно заданной величине.
2. Контрольно-проверочная система по п. 1, отличающаяся тем, что подъемное устройство (2), подлежащее испытанию, установлено непосредственно на основании (11), а не на опорном кронштейне (12), и подъемное устройство (2), подлежащее испытанию, содержит основную часть (22) опоры и вертикальную опорную стойку (21).
3. Контрольно-проверочная система по п. 1 или 2, отличающаяся тем, что опорный кронштейн (12) содержит первую опорную стойку (121) и вторую опорную стойку (122), обе из которых расположены на основании (11); горизонтальная балка (123) расположена между первой опорной стойкой (121) и второй опорной стойкой (122); подъемное устройство (2), подлежащее испытанию, расположено между первой опорной стойкой (121) и второй опорной стойкой (122) и находится под горизонтальной балкой (123); нагрузочное устройство (13) установлено на горизонтальной балке (123) и расположено между горизонтальной балкой (123) и подъемным устройством (2), подлежащим испытанию.
4. Контрольно-проверочная система по п. 1 или 2, отличающаяся тем, что нагрузочное устройство (13) содержит гидравлический цилиндр (131), неподвижный конец (1311) гидравлического цилиндра (131) закреплен на опорном кронштейне (12), поршневой конец (1312) расположен вблизи подъемного устройства (2), подлежащего испытанию; нижняя часть поршневого конца гидравлического цилиндра (131) обеспечена датчиком (133) давления, выполненным с возможностью обнаружения давления нагрузки гидравлического цилиндра (131), и датчик (133) давления присоединен к управляющему устройству для передачи сигнала давления, обнаруженного датчиком (133) давления, в управляющее устройство.
5. Контрольно-проверочная система по п. 3, отличающаяся тем, что нагрузочное устройство (13) содержит гидравлический цилиндр (131), неподвижный конец (1311) гидравлического цилиндра закреплен под горизонтальной балкой (123), поршневой конец (1312) гидравлического цилиндра и соединение (132), расположенное на нижнем конце поршневого конца, находятся на стороне, ближайшей к подъемному устройству (2), подлежащему испытанию; датчик (133) давления расположен под соединением (132), и датчик (133) давления присоединен к управляющему устройству с целью передачи сигнала давления, обнаруженного датчиком (133) давления, в управляющее устройство; соединение (132) и датчик (133) давления соединены с возможностью перемещения посредством соединительного элемента (135).
6. Контрольно-проверочная система по п. 5, отличающаяся тем, что соединительный элемент (135) содержит первый соединительный элемент (1351) и второй соединительный элемент (1352); причем верхний конец первого соединительного элемента (1351) закреплен на нижней части поршневого конца или на соединении (132), нижний конец второго соединительного элемента (1352) закреплен на датчике (133) давления; первый соединительный элемент (1351) обеспечен первым отверстием (136), а второй соединительный элемент (1352) обеспечен вторым отверстием (137), соответствующим первому отверстию (136); первый соединительный элемент (1351) и второй соединительный элемент (1352) соединены друг с другом путем размещения крепежного элемента в первом отверстии (136) и втором отверстии (137); причем по меньшей мере одно из первого отверстия (136) или второго отверстия (137) представляет собой вертикально удлиненное отверстие.
7. Контрольно-проверочная система по п. 6, отличающаяся тем, что нижний конец датчика (133) давления обеспечен торцевой крышкой (134) датчика; и нижний конец второго соединительного элемента (1352) закреплен на торцевой крышке (134) датчика.
8. Контрольно-проверочная система по любому из пп. 4–7, отличающаяся тем, что гидравлический цилиндр (131) обеспечен датчиком (132) смещения, и при этом датчик (132) смещения является применяемым для обнаружения сигнала смещения гидравлического цилиндра (131).
9. Контрольно-проверочная система по п. 8, отличающаяся тем, что верхний конец датчика (132) смещения закреплен на неподвижном конце (1311), и его нижний конец закреплен на нижней части поршневого конца или на соединении (132); управляющее устройство дополнительно содержит модуль приема сигнала смещения, выполненный с возможностью приема сигнала смещения, и модуль вывода сигнала смещения, выполненный с возможностью вывода величины сигнала смещения, и эти модули электрически соединены с управляющим устройством.
10. Контрольно-проверочная система по любому из пп. 4–9, отличающаяся тем, что управляющее устройство электрически соединено с тензодатчиками, прикрепленными к подъемному устройству (2), подлежащему испытанию, тензодатчики образуют трехмерную розетку (15) тензодатчиков с угловым распределением 45°; управляющее устройство содержит модуль приема, выполненный с возможностью приема величины объемного напряжения розетки (15) тензодатчиков, вычислительный модуль, выполненный с возможностью вычисления величины основного напряжения подъемного устройства (2), подлежащего испытанию, соответственно величинам напряжения розетки (15) тензодатчиков, и управляющий модуль, выполненный с возможностью вывода величины основного напряжения в вычислительный модуль; модуль приема электрически соединен с вычислительным модулем, а вычислительный модуль электрически соединен с управляющим модулем.
11. Контрольно-проверочная система по п. 10, отличающаяся тем, что тензодатчик расположен на вертикальной опорной стойке (21) подъемного устройства (2), подлежащего испытанию, и рядом с местом соединения вертикальной опорной стойки (21) и основной части (22) опоры; три тензодатчика образуют одну розетку (15) тензодатчиков, розетка (15) тензодатчиков содержит первый тензодатчик, расположенный горизонтально, второй тензодатчик, расположенный вертикально, и третий тензодатчик, расположенный между горизонтальным направлением и вертикальным направлением; причем ось x, на которой расположен первый тензодатчик, направлена к консольному концу (221) основной части (22) опоры, ось y, на которой расположен второй тензодатчик, направлена к соединению основной части (22) опоры и вертикальной опорной стойки (21), ось u, на которой расположен третий тензодатчик, расположена между осью x и осью y.
12. Контрольно-проверочный способ осуществления испытаний под нагрузкой подъемного устройства подъемника для транспортных средств, в котором применяют контрольно-проверочную систему по любому из пп. 1–11, отличающийся тем, что включает следующие этапы:
отправка управляющим устройством управляющего сигнала нагрузочному устройству (13) согласно начальной заданной величине давления;
прием гидравлическим цилиндром (131) нагрузочного устройства (13) управляющего сигнала и приложение начальной заданной величины давления в качестве начального давления к подъемному устройству (2), подлежащему испытанию;
непрерывное повышение гидравлическим цилиндром (131) величины давления до величины давления, умноженной на предварительно заданную номинальную величину давления, в процессе нагрузки давлением, и передача датчиком (133) давления, соединенным с гидравлическим цилиндром (131), по каналу обратной связи в режиме реального времени сигналов давления, приложенного гидравлическим цилиндром (131), в управляющее устройство с целью обнаружения величины давления нагрузки;
одновременное регулирование управляющим устройством величины приложенного давления согласно сигналу давления, полученному по обратной связи, для управления давлением нагрузки.
13. Контрольно-проверочный способ по п. 12, отличающийся тем, что дополнительно включает следующие этапы: при осуществлении нагрузки давлением гидравлическим цилиндром (131) при начальной заданной величине давления обнаружение датчиком (132) смещения начальной величины смещения гидравлического цилиндра (131) и передача по каналу обратной связи в управляющее устройство; и при прикладывании гидравлическим цилиндром (131) давления, достигающего величины давления, умноженной на предварительно заданную номинальную величину давления, обнаружение датчиком (132) смещения второй величины смещения гидравлического цилиндра (131) и передача по каналу обратной связи в управляющее устройство; вычисление управляющим устройством разности между второй величиной смещения и начальной величиной смещения и вывод разности в качестве проверки величины отклонения подъемного устройства (2), подлежащего испытанию.
14. Контрольно-проверочный способ по п. 12 или 13, отличающийся тем, что дополнительно включает следующие этапы: прием управляющим устройством сигналов напряжения розетки (15) тензодатчиков, прикрепленной к подъемному устройству (2), подлежащему испытанию; вычисление вычислительным модулем управляющего устройства величины основного напряжения согласно предварительно заданным формулам для проверки напряжения подъемного устройства (2), подлежащего испытанию.
15. Контрольно-проверочный способ по п. 14, отличающийся тем, что на этапе проверки величины напряжения предварительно заданные формулы в вычислительном модуле имеют следующий вид:


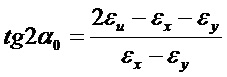


вычислительный модуль последовательно вычисляет величины напряжения согласно предварительно заданным формулам; где E — модуль упругости, ν — коэффициент Пуассона, ε — напряжение в каждом направлении розетки тензодатчиков, σ — величина основного напряжения.
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ НАГРУЗКИ ДЛЯ ПОДЪЕМНИКОВ И ПОДОБНЫХ МЕХАНИЗМОВ | 2004 |
|
RU2360220C2 |
| Стенд для испытания подъемных механизмов автомобилей-самосвалов | 1956 |
|
SU106098A1 |
| US 6912916 B1, 05.07.2005 | |||
| CN 102235943 A, 09.11.2011. | |||

