Изобретение относится к области неразрушающего контроля изделий с эквидистантными поверхностями ультразвуковым (УЗ) зеркально-теневым методом. Способ может быть использован при контроле протяженных изделий, в частности железнодорожных рельсов и других изделий плоскопараллельными поверхностями (металлопрокат, тавровые элементы и т.п.).
При УЗ контроле ответственных изделий, кроме широко применяемого эхо-метода, возможно использование и зеркально-теневого метода (ЗТМ) контроля, признаком обнаружения дефекта в котором является ослабление донного сигнала, отраженного от противоположной (донной) поверхности изделия с эквидистантными (плоскопараллельными) поверхностями, ниже заданного порогового уровня. Причем эхо-метод не является достаточно информативным при контроле качества некоторых металлоконструкций. Так ряд дефектов в рельсах может быть обнаружен только ЗТМ [1].
При контроле указанных изделий временные положения донных сигналов относительно зондирующих импульсов имеют постоянные значения, определяемые временем пробега УЗ колебаний от излучателя к донной поверхности и от донной поверхности к приемнику. Для дальнейшей обработки их выделяют с помощью стробирующего импульса с длительностью, обеспечивающего прием в определенной временной зоне. Так как при реализации ЗТМ информативным признаком в основном является амплитуда донного сигнала, то, как правило, формируют амплитудную огибающую донных сигналов. При контроле бездефектного участка в процессе сканирования эта огибающая представляет собой горизонтальную линию, параллельную оси времени, с уровнем, отображающем среднее значение амплитуды U0 донных сигналов. При наличии внутреннего дефекта за счет перекрытия траектории УЗ пучка дефектом происходит ослабление амплитуды донного сигнала и отклонение (спад) линии донного сигнала.
Следует подчеркнуть, что при анализе огибающей донного сигнала, происходит оценка его двукратного ослабления в зоне дефекта: при прохождении УЗ волн от поверхности сканирования до противоположной поверхности и обратно - до поверхности сканирования. В этом принципиальное отличие зеркально-теневого метода от эхо метода УЗ контроля изделий.
При реализации эхо метода реакция на дефектное сечение определяется амплитудой эхо-сигналов от отражающих точек дефекта, а величина амплитуды определяется как ориентацией дефекта, так и количеством отражающих точек дефекта (площади отражения). Таким образом, при эхо-методе сигнал даже от большого дефекта может иметь малую амплитуду или вовсе отсутствовать (если из-за ориентации или состояния поверхности дефекта отсутствуют отражения в сторону приемного ЭАП).
Для ЗТМ, независимо от ориентации дефекта, при двукратном пробеге у.з. волн через дефектное сечение, ослабление амплитуды донного сигнала будет заметно. Например, при контроле ж.д. рельсов, даже от трудновыявляемой вертикальной трещины в шейке (по коду 50), в волноводе, ограниченном шейкой рельса и диаграммой направленности ЭАП, за счет изменения траектории УЗ лучей (биения между плоскостью вертикальной трещины и стенкой шейки рельса), происходит заметное ослабление донного сигнала.
Одним из недостатков ЗТМ при наклонном вводе УЗ колебаний является проблема, возникающая при контроле изделий с изменяющейся высотой контролируемого изделия. Например, при контроле с помощью вагона-дефектоскопа железнодорожных рельсов на участке контроля (до 250 км за один проезд) могут быть уложены рельсы разных типов: как рельсы типа Р65, высотой Н=180 мм, так и рельсы типа Р50, высотой 152 мм. Кроме того, рельсы могут быть как новые, так и старые, с допустимым вертикальным износом (по нормативно-технической документации - до 10 мм). В результате, при одной и той же настройке приходится контролировать изделие, высота которого может меняться на 38 мм. Естественно, при этом контроль проводится в неоптимальном режиме, что снижает надежность и достоверность контроля.
Для устранения этого недостатка в технических решениях [2-4] предусмотрены возможности корректировки расстояния между двумя наклонными ЭАП механическим способом при изменении высоты рельса. Причем, этот процесс осуществляется с помощью серводвигателя или иным способом при каждом изменении высоты рельса. Очевидно, что такая система имеет сложную конструкцию и обладает инерционностью и низкой надежностью контроля.
Вторым недостатком ЗТМ при наклонном вводе УЗ колебаний является невозможность определения координат выявляемых дефектов по высоте контролируемого изделия. Эхо-метод, традиционно используемый для этих целей, обладает низкой точностью определения координат дефекта. В результате, сигналы от конструктивных элементов (например, при контроле рельсов: отверстий в шейке для тяговых трансформаторов; болтовых отверстий в зоне стыков), имеющих нормированные значения координат по высоте рельса, ошибочно могут быть приняты за сигналы от опасных дефектов. Во многих случаях (например, от вертикальных трещин) эхо-сигналы могут вообще отсутствовать, что приводит к пропуску дефектов критического размера. Поэтому ЗТМ иногда является единственным способом, позволяющим своевременно обнаруживать опасные дефекты в изделиях с эквидистантными поверхностями.
Для устранения этого недостатка в УЗ зеркально-теневом способе дефектоскопии [5] при синхронном перемещении по контролируемому изделию толщиной Н с эквидистантными поверхностями, двух встречно направленных наклонных ЭАП, установленных на расстоянии L друг от друга, фиксируют местоположения ослаблений амплитуд отраженных от противоположной поверхности изделия УЗ колебаний, измеряют расстояние / между двумя ослаблениями и вычисляют глубину ho залегания дефекта по формуле

Благодаря оригинальному решению, в известном способе, впервые предложено решение задачи определения глубины залегания дефекта зеркально-теневым методом при любом способе излучения (непрерывном, импульсном) УЗ колебаний.
Недостатком способа, принятого за прототип, является низкая надежность и достоверность контроля при дефектоскопии изделий, в которых в процессе сканирования толщина изделия Н может меняться. Как, например, при контроле железнодорожных рельсов вагонами-дефектоскопами участков пути, в которых уложены рельсы разных типов и, к тому же с возможными вертикальными износами. В выражении (1) прототипа используется постоянное значение высоты Н контролируемого изделия, что в реальных условиях приводит к значительным погрешностям определения координат дефекта.
Задачей, решаемым заявляемым способом, является повышение надежности и достоверности УЗ контроля изделий с эквидистантными поверхностями за счет обнаружения и оценки глубины залегания разнориентированных дефектов при изменении, в процессе контроля, высоты изделия в определенных пределах.
Для решения этой задачи в способе ультразвукового контроля изделий с эквидистантными поверхностями, заключающийся в том, что с помощью наклонного электроакустического преобразователя с заданным шагом излучают в изделие зондирующие ультразвуковые сигналы, которые отражаясь от противоположной поверхности изделия, принимаются другим наклонным электроакустическим преобразователем, установленным на известном расстоянии от излучающего, оценивают амплитуды принятых ультразвуковых сигналов, совместно перемещают электроакустические преобразователи по поверхности изделия, измеряя их координаты, сохраняют координаты точек существенного ослабления амплитуд принятых ультразвуковых сигналов, оценивают расстояние между указанными точками и вычисляют глубину залегания дефекта, отличающийся тем, что ширину диаграммы направленности электроакустических преобразователей выбирают из условия стабильного приема отраженных от противоположной поверхности изделия ультразвуковых сигналов во всем диапазоне возможных изменений высоты изделия, на бездефектных участках изделия измеряют время распространения ультразвуковых сигналов от излучающего электроакустического преобразователя к приемному, по измеренному времени и скорости распространения ультразвуковых колебаний определяют текущую толщину изделия, которую используют при вычислении глубины залегания дефекта.
Техническим результатом заявляемого способа является повышение надежности и достоверности УЗ контроля изделий с эквидистантными поверхностями, у которых высота изделия в процессе сканирования может изменяться в определенных пределах.
Существенными отличиями заявляемого способа являются:
1. Имея предварительные данные о возможных изменениях высоты контролируемого изделия (на максимальную величину АН) для реализации способа специально подбирают ЭАП, имеющие соответствующие диаграммы направленности, позволяющие охватить весь диапазон высот контролируемого изделия. В прототипе вопросы выбора ЭАП по значению ширины диаграммы направленности не рассматриваются.
2. Определение текущей высоты контролируемого изделия по времени двукратного пробега УЗ колебаний под наклонным углом через изделие с отражением от противоположной поверхности. Учет этого параметра в расчетах глубины залегания дефекта повышает точность и достоверность контроля. В прототипе расчет по выражению (1) ведется по неизменному значению высоты Н, что в реальных условиях контроля приводит к грубым ошибкам определения глубины залегания дефекта и к снижению достоверности контроля.
Между совокупностью существенных признаков заявляемого способа и достигаемым техническим результатом существует причинно-следственная связь, а именно: использование ЭАП специально подобранной шириной диаграммы направленности обеспечивает стабильный прием отраженных от противоположной поверхности изделия ультразвуковых сигналов во всем диапазоне возможных изменений высоты изделия; измерение времени распространения ультразвуковых сигналов от излучающего электроакустического преобразователя к приемному позволяет определить текущую высоту изделия по мере сканирования изделия; использование текущей высоты для вычисления глубины залегания дефекта повышает надежность и достоверность УЗ контроля изделий.
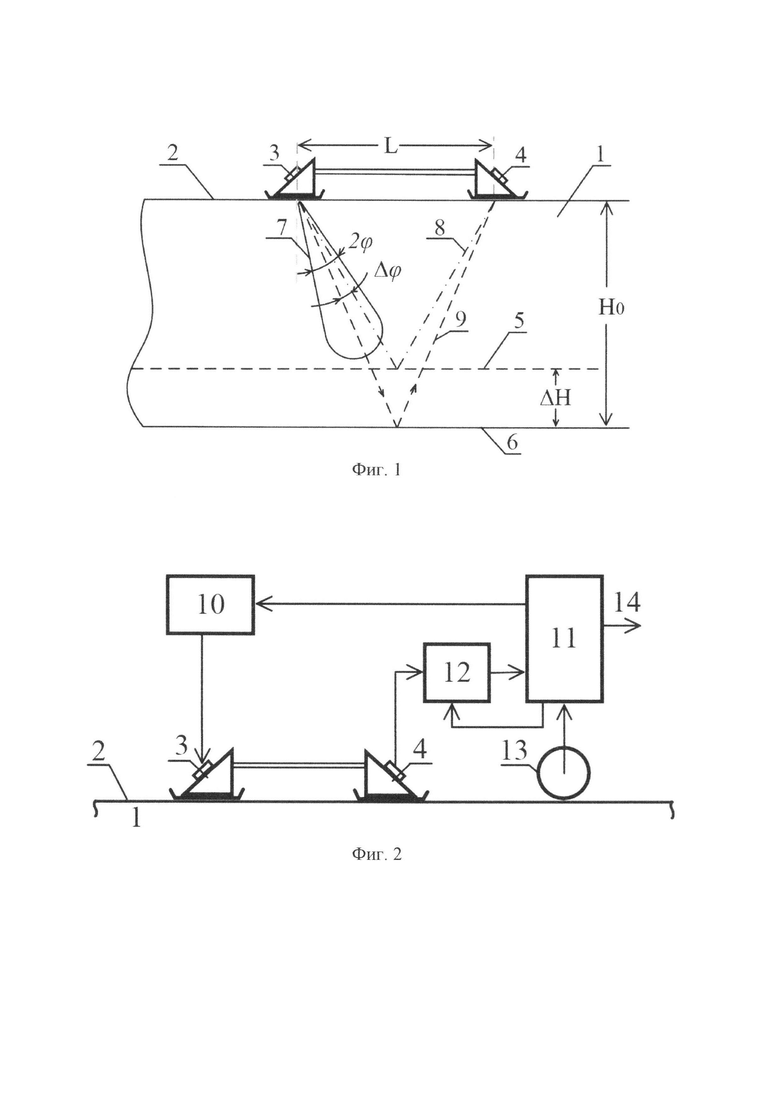
На Фиг. 1 приведена схема реализации предлагаемого способа на изделии с дискретными высотами:
где 1 - контролируемое изделие;
2 - поверхность сканирования;
3 - первый наклонный электроакустический преобразователь (ЭАП);
4 - второй ЭАП;
5 - противоположная (донная) поверхность при минимальной высоте (Н0 - ΔН) изделия;
6 - донная поверхность при максимальной высоте Н0 изделия;
7 - диаграмма направленности ЭАП;
8 - траектория распространения УЗ лучей при минимальной высоте изделия
9 - траектория распространения УЗ лучей при высоте Н0 изделия.
На Фиг. 2 - приведена укрупненная функциональная схема дефектоскопа, реализующего заявляемый способ, где:
10 - генератор зондирующих импульсов;
11 - вычислитель;
12 - приемник;
13 - датчик пути (одометр);
14 - выход вычислителя.
На Фиг. 3 показан процесс формирования огибающей донных сигналов при озвучивании дефекта по мере перемещения ЭАП по поверхности сканирования, где:
15 - локальный внутренний дефект в контролируемом изделии;
16 - донные сигналы;
17 - амплитудная огибающая донных сигналов;
18 и 19 - ослабления донных сигналов под первым и вторым ЭАП соответственно.
Рассмотрим возможность реализации заявляемого способа.
На поверхность сканирования 2 изделия 1 с плоскопараллельными (эквидистантными) поверхностями 2 и 6 (или 5, при вертикальном износе) с номинальной высотой Н0, на определенном расстоянии L устанавливают два встречно направленных наклонных ЭАП 3 и 4 (Фиг. 1). Причем расстояние L между этими ЭАП выбирают из условия получения УЗ сигналов, отраженных от противоположной поверхности 6 изделия 1. В процессе сканирования изделия 1 это расстояние L остается неизменным.
По мере движения системы, на отдельных участках высота изделия 1 может иметь значение Н, отличающееся от номинального значения Ho на максимальную величину ΔН (Фиг. 1 - донная поверхность 5). Естественно, при этом меняется и временное положение t донного сигнала. В процессе сканирования с периодичностью Т излучения зондирующих колебаний измеряют временные положения t донных сигналов (Фиг. 36). Периодичность T излучения и скорость v перемещения ЭАП определяют шаг сканирования изделия. По измеренному значению времени t и известной скорости с распространения УЗ колебаний вычисляется текущее значение высоты Н:

Подставив полученное из (2) значение Н в выражение (1) определяется глубина h0 залегания дефекта:

В зависимости от используемых углов а ввода/приема УЗ колебаний ЭАП 3 и 4 в процессе контроля могут быть использованы как продольные, так и сдвиговые колебания. При этом в выражении (3), вместо значения с могут подставляться соответствующие значения скорости УЗ (либо  - для продольных, либо ct - для сдвиговых колебаний).
- для продольных, либо ct - для сдвиговых колебаний).
Для успешной реализации предлагаемого способа выбирают ЭАП 3 и 4, значения ширины 2ϕ диаграммы направленности 7 которых должны удовлетворять условию

где, Δϕ - угол между траекториями (линиями 8 и 9 на Фиг. 1) распространения УЗ лучей при изменении высоты изделия во всем возможном диапазоне ΔН. Для оценки значения Δϕ предлагается выражение

Укрупненная функциональная схема дефектоскопа (Фиг. 2), реализующего заявляемый способ, состоит из последовательно соединенных ЭАП 3, генератора зондирующих сигналов 10, вычислителя 11, одометра 13. Ко второму входу вычислителя 11, через усилитель 12 подключен ЭАП 4. В общем случае вычислитель 11 имеет обратную связь с приемником 12 для корректировки коэффициента усиления при длительном (t>L/v) уменьшении амплитуды донных сигналов. Задание частоты F=1/Т посылок зондирующих импульсов, оцифровка и обработка принятых сигналов, выделение и оценка амплитудной огибающей донных сигналов, вычисление глубины h0 залегания дефекта по выражению (3) с учетом временного положения t донных сигналов и измеренного временного расстояния Δt между двумя ослаблениями донных сигналов с учетом скорости сканирования производится в вычислителе 11. Результаты обработки сигналов поступают на выход 14 вычислителя 11 для дальнейшего документирования или включения сигнализатора дефектов (на Фиг. не показан).
При обработке сигналов в вычислителе 11 целесообразнее оперировать временными интервалами. Для определения скорости перемещения системы из двух ЭАП используется датчик пути (одометр) 13 (Фиг. 2). При известной скорости v сканирования системы ЭАП расстояние  определяется из временного интервала
определяется из временного интервала  между точками уменьшения донных сигналов. Тогда окончательное выражение для вычисления глубины залегания дефекта
между точками уменьшения донных сигналов. Тогда окончательное выражение для вычисления глубины залегания дефекта

При озвучивании участка изделия с локальным дефектом 15 (Фиг. 3а), вследствие экранирования дефектом пути прохождения УЗ пучка от ЭАП 3 до противоположной поверхности изделия 5 и, после отражения - к ЭАП 4, происходит уменьшение амплитуд принимаемых ЭАП 4 сигналов. В зависимости от размера озвучиваемого дефекта 15, уровень донных сигналов 16 может уменьшиться до нулевого значения. По мере перемещения системы из двух ЭАП, при наличии в изделии 1 локального дефекта 15 происходит двукратное ослабление донных сигналов (см. положения ЭАП 3' и 4' на Фиг. 3). Расстояние  между этими ослаблениями, в соответствии с (3 и 5), зависит от глубины h0 залегания дефекта. Очевидно, что при малых глубинах залегания величина
между этими ослаблениями, в соответствии с (3 и 5), зависит от глубины h0 залегания дефекта. Очевидно, что при малых глубинах залегания величина  близка к значению базового расстояния L между ЭАП, а при озвучивании дефекта вблизи противоположной (донной) поверхности
близка к значению базового расстояния L между ЭАП, а при озвучивании дефекта вблизи противоположной (донной) поверхности  близка к 0.
близка к 0.
Как показывает практика, расстояние между уменьшениями донных сигналов рационально отсчитывать на относительном уровне 0,5U0, где U0 - среднее значение донного сигнала на бездефектном участке контролируемого изделия 1 (Фиг. 3б). Т.е. уменьшение уровня донных сигналов ниже 0,5U0 считается существенным. В общем случае возможен отсчет искомого параметра и на других уровнях.
Функциональная схема дефектоскопа (Фиг. 2), реализующая способ, содержит типовые радиотехнические элементы и узлы (генератор зондирующих сигналов 10, усилитель 12, одометр 13). Вычислитель 11 производит обработку сигналов в соответствии с предложенным в данном описании выражении (6) алгоритмом. Схема является укрупненной и приведена для доказательства реализуемости предлагаемого способа. В общем случае возможны и другие варианты реализации дефектоскопа, включающие последовательного выполнения предложенного алгоритма.
В качестве ЭАП могут использоваться как типовые преобразователи с использованием пьезопластин (ПЭП), так и бесконтактные преобразователи, например, на основе электромагнитно-акустических преобразователей (ЭМАП).
В качестве примера рассмотрим реальную ситуацию контроля вагоном-дефектоскопом рельсов типа Р65 с номинальной высотой Н0=180 мм при скорости 60 км/ч (16,7 м/с). При этом известно, что на контролируемом участке пути могут перегоны с рельсами типа Р50. Пропущенный тоннаж по контролируемому участку составляет в среднем более 500 млн. т брутто, а значит, возможны отдельные участки с максимально допустимым вертикальным износом до 10 мм. В результате возможный диапазон изменения высот контролируемого изделия (рельса) на контролируемом участке пути составляет ΔН=38 мм.
Выбор ЭАП для реализации способа выполнен исходя из требований (4) с учетом (5). Расстояние между двумя встречно направленными ЭАП из конструктивных и акустических соображений выбран равным L=152 мм. В качестве ЭАП выбраны наклонные УЗ пьезопреобразователи с углом ввода колебаний в металл рельса α=23° с излучением/приемом продольных УЗ колебаний со скоростью распространения  . В результате расчета по (4)
. В результате расчета по (4)
установлено, что ЭАП на базе пьезопластины диаметром 10 мм с существенным запасом удовлетворяет сформулированному требованию (3): ϕ=7,3° при рассчитанной по (5) величине Δϕ=6,5°. При этом некоторый спад амплитуды вследствие формирования донного сигнала боковыми лучами основного лепестка ДН ЭАП компенсируется заметным сокращением траектории пробега УЗ колебаний на участках изделия с меньшей высотой. При необходимости, средний уровень донного сигнала может быть скорректирован («вытянут») благодаря обратной связи вычислителя 11 с усилителем 12 (Фиг. 2).
В процессе контроля на одном из участков обнаружено двукратное ослабление огибающей донных сигналов. Установлено, что измеренное расстояние между двумя ослаблениями донных сигналов составляет  . Измеренное временное положение донных сигналов относительно зондирующего сигнала на бездефектном участке вблизи участка с дефектом показало значение t=54,6 мкс. Вычисления по предложенному выражению (6) значение глубины h0 залегания дефекта свидетельствуют, что в момент обнаружения дефекта искательная система (ЭАП 3 и 4) сканировала участок с уложенными рельсами типа Р50, причем со значительным износом Н=(152-10)=142 мм. Фактическая глубина залегания дефекта составляет h0=86,62 мм, что было и подтверждено натурными измерениями с выходом на железнодорожную линию (87 мм).
. Измеренное временное положение донных сигналов относительно зондирующего сигнала на бездефектном участке вблизи участка с дефектом показало значение t=54,6 мкс. Вычисления по предложенному выражению (6) значение глубины h0 залегания дефекта свидетельствуют, что в момент обнаружения дефекта искательная система (ЭАП 3 и 4) сканировала участок с уложенными рельсами типа Р50, причем со значительным износом Н=(152-10)=142 мм. Фактическая глубина залегания дефекта составляет h0=86,62 мм, что было и подтверждено натурными измерениями с выходом на железнодорожную линию (87 мм).
Выражение (1) прототипа, не учитывающее возможное изменение текущей высоты Н контролируемого изделия, дает значение глубины залегания дефекта hp=108,95 мм, что превышает реальное значение глубины залегания дефекта более чем на 25%. Естественно такое искажение фактического значения координат дефекта не допустимо, и приводит к низкой достоверности контроля.
Отметим, что координата дефекта, вычисленная предлагаемым способом, не зависит от отражающих свойств поверхностей дефекта и, в основном, является координатой центра дефекта (точки последовательного пересечения траекторий УЗ лучей на дефекте при его двукратном озвучивании(см. Фиг. 3а). С точки зрения проведения в последующем ремонтных работ, получаемое значение глубины залегания предпочтительнее, чем координаты отражающих точек при эхо-методе.
Приложенный способ ультразвукового контроля изделий с эквидистантными поверхностями многократно проверен на различных моделях дефектов, залегающих по всей высоте контролируемого изделия путем математического моделирования известным программным продуктом CIVA, а также экспериментальными исследованиями на фрагментах рельсов с реальными дефектами. Способ внедрен в одном из вагонов-дефектоскопов с аппаратурой АВИКОН-ОЗМ. Способ оказался особенно эффективным при обнаружении сложно-выявляемых традиционными методами дефектов в шейке рельса преимущественно вертикальной (и с незначительными наклонами) ориентации.
Таким образом, способ может быть реализован, повышает надежность и достоверность контроля изделий с эквидистантными поверхностями.
Источники информации
1. Гурвич А.К. Зеркально-теневой метод ультразвуковой дефектоскопии. - М.: Машиностроение, 1970. - 34 с.
2. Патент US 4174636.
3. Патент US 9010186 (US 2013111997).
4. Патент US 4689995.
5. Патент RU 1056048.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ зеркально-теневого ультразвукового контроля с адаптивным пороговым уровнем | 2022 |
|
RU2787948C1 |
| Способ ультразвукового контроля изделий | 2016 |
|
RU2622459C1 |
| Ультразвуковой способ обнаружения и оценки сварных стыков рельсов при высокоскоростном контроле | 2021 |
|
RU2764571C1 |
| Способ оценки работоспособности искательной системы дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2758403C1 |
| Способ обнаружения дефектов в рельсах | 2018 |
|
RU2668941C1 |
| Способ ультразвукового контроля локальных участков железнодорожных рельсов | 2023 |
|
RU2818035C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ ПРОДОЛЬНЫХ ТРЕЩИН В ГОЛОВКЕ РЕЛЬСА | 2019 |
|
RU2712975C1 |
| Способ высокоскоростной ультразвуковой дефектоскопии длинномерных объектов | 2021 |
|
RU2756933C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА ПОВЕРХНОСТИ КАТАНИЯ ГОЛОВКИ РЕЛЬСА | 2017 |
|
RU2652511C1 |
| СПОСОБ МНОГОКАНАЛЬНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2023 |
|
RU2809185C1 |

Использование: для неразрушающего контроля изделий с эквидистантными поверхностями ультразвуковым зеркально-теневым методом. Сущность изобретения заключается в том, что с помощью наклонного электроакустического преобразователя с заданным шагом излучают в изделие зондирующие ультразвуковые сигналы, которые отражаясь от противоположной поверхности изделия, принимаются другим наклонным электроакустическим преобразователем, установленным на известном расстоянии от излучающего, оценивают амплитуды принятых ультразвуковых сигналов, совместно перемещают электроакустические преобразователи по поверхности изделия, измеряя их координаты, сохраняют координаты точек существенного ослабления амплитуд принятых ультразвуковых сигналов, оценивают расстояние между указанными точками и вычисляют глубину залегания дефекта, ширину диаграммы направленности электроакустических преобразователей выбирают из условия стабильного приема отраженных от противоположной поверхности изделия ультразвуковых сигналов во всем диапазоне возможных изменений высоты изделия, на бездефектных участках изделия измеряют время распространения ультразвуковых сигналов от излучающего электроакустического преобразователя к приемному, определяют текущую толщину изделия, которую используют при вычислении глубины залегания дефекта. Технический результат: повышение надежности и достоверности ультразвукового контроля изделий с эквидистантными поверхностями, у которых высота изделия в процессе сканирования может изменяться в определенных пределах. 3 ил.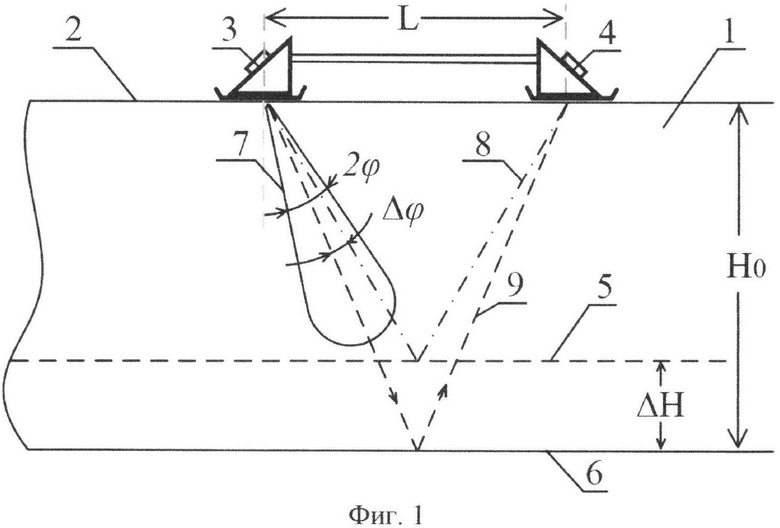
Способ ультразвукового контроля изделий с эквидистантными поверхностями, заключающийся в том, что с помощью наклонного электроакустического преобразователя с заданным шагом излучают в изделие зондирующие ультразвуковые сигналы, которые отражаясь от противоположной поверхности изделия, принимаются другим наклонным электроакустическим преобразователем, установленным на известном расстоянии от излучающего, оценивают амплитуды принятых ультразвуковых сигналов, совместно перемещают электроакустические преобразователи по поверхности изделия, измеряя их координаты, сохраняют координаты точек существенного ослабления амплитуд принятых ультразвуковых сигналов, оценивают расстояние между указанными точками и вычисляют глубину залегания дефекта, отличающийся тем, что ширину диаграммы направленности электроакустических преобразователей выбирают из условия стабильного приема отраженных от противоположной поверхности изделия ультразвуковых сигналов во всем диапазоне возможных изменений высоты изделия, на бездефектных участках изделия измеряют время распространения ультразвуковых сигналов от излучающего электроакустического преобразователя к приемному, определяют текущую толщину изделия, которую используют при вычислении глубины залегания дефекта.
| Ультразвуковой зеркально-теневой способ дефектоскопии | 1982 |
|
SU1056048A1 |
| Способ зеркально-теневого ультразвукового контроля изделий равного сечения | 1988 |
|
SU1497561A1 |
| Способ зеркально-теневого ультразвукового контроля деталей равного сечения | 1981 |
|
SU1049798A1 |
| Ультразвуковой зеркально-теневой дефектоскоп | 1987 |
|
SU1525568A1 |
| US 3960005 A, 01.06.1976. | |||

