Изобретение относится к ро.бототехнике и может быть использовано для подачи деталей в зону обработки.
Известен манипулятор l, содержащий основание, корпус с установленным на нем механизмом вертикального перемещения и механизм поворота и горизонтального перемещения руки.
У этого манипулятора сложная конструкция, большие габариты и вес.
Цель изобретения - упрощение конструкции, уменьшение веса и габаритов.
Цель достигается тем, что механизм поворота и горизонтального перемещения механической руки выполнен в виде встроенного в корпус руки электродвигателя с двумя выходными валами, червячной передачи и управляеких муфт, причем один вал электродвигателя через первую муфту связан с червяком червячной передачи, другой через вторую муфту кинематически связан со схватом, а в хвостовом винте механизма вертикального перемещения выполнен продольный паз, в котором установлен дополнительно введенный ползун, кинематически связанный с корпусом.
(54) МАНИПУЛЯТОР
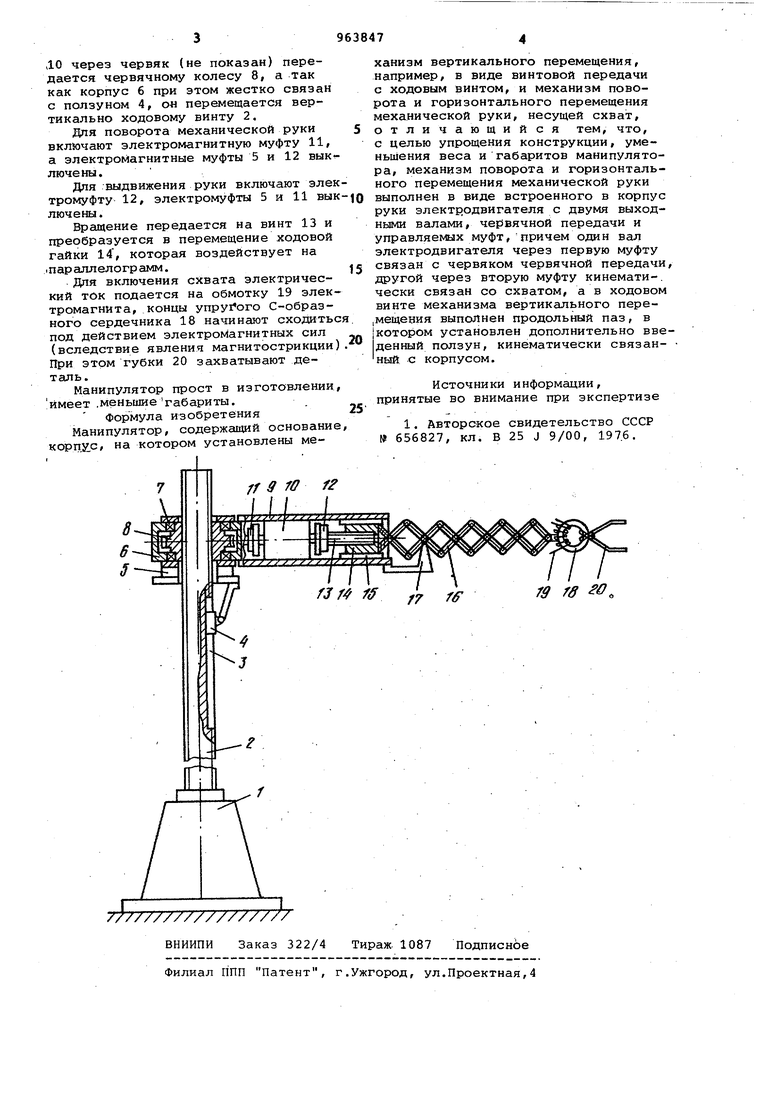
Сущность изобретения поясняется чертежом.
На основании 1 закреплен ходовой винт 2, имеющий паз 3 и ползун 4, связанный с полумуфтой элуктромагнитЧ ной муфты 5, закрепленной на корпусе 6, в котором на подшипниках 7 установлено червячное колесо 8. В корпусе 9 установлен электродвига10тель 10 с двумя выходными валами, один из которых через электромагнитную муфту 11 связан с червячной передачей (не показана), а другой через электромагнитную муфту 12 - с
15 винтом 13 и ходовой гайкой 14, перемещающейся по направляющим 15, много кратный шарнирный параллелограмм 16, закрепленный на корпусе 9 при помощи кронштейна 17, шарнирно связан с
20 ходовой гайкой 14. Схват, закрепленный на конце параллелограмма 16 состоит из сердечника 18, обмотки 19 и захватных губок 20, установленных на концах сердечника.
25
Работает манипулятор следующим образом.
Для подъема механической руки включают электродвигатель 10 и электромагнитные муфты 5 и 11. Муфта 12
30 выключена. Вращение электродвигателя
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1085804A1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| Устройство для поштучной выдачи плоских заготовок | 1983 |
|
SU1098630A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| Полуавтоматическая установка для изготовления галош методом штамповки | 1952 |
|
SU118973A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1131648A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
