Область техники
Изобретение относится к способам управления автоматизированными устройствами и может быть использовано при координации наземных подвижных автоматизированных устройств (автоматического транспорта, автоматических сельскохозяйственных машин, коммунальной и аэродромной техники, садовых газонокосилок и пр.), далее - роботов.
Уровень техники
Одной из главных проблем навигации, координации и управления роботами является отсутствие способа дешевой и надежной навигации на контролируемой траектории и взаимной ситуативной координации действий группы роботов. Например, для того, чтобы робот-газонокосилка не вышел за пределы территории для покоса травы, ее нужно обозначить проволокой (см. интернет публикацию от 15 июня 2012 года http://www.therobotreport.com/news/robot-lawnmowers-still-a-work-in-progress).
Последнее время предлагаются системы инфракрасных заборов или меток. Также возможна система наземных радиомаяков. Но такой подход значительно усложняет систему.
Использование GPS навигаторов и даже более точных DGPS систем несет с собой ряд недостатков:
1) сигнал GPS вблизи домов может экранироваться, переотражаться да и просто глушиться помехами случайно или преднамеренно, что приводит к нарушению координации робота;
2) необходимо померить координаты границы территории работы (например, территории покоса для робота-газонокосилки) и указать их роботу, что является трудоемким процессом;
3) такие системы дают координаты, но не ориентацию робота;
4) ориентация роботов происходит по предопределенным координатам, а не реальному окружению робота (так, если появится новое стационарное или движущееся препятствие (собака, ребенок), то система его не обнаружит);
5) такие системы не способны распознать плохо покошенные из-за погрешностей участки и исправить их целенаправленно;
6) с использованием DGPS или GPS сложно организовать взаимную координацию группы роботов, которые не знают своего взаимного положения и должны иметь сложную систему взаимного обнаружения и обмена сигналами;
7) спутниковые системы имеют высокую себестоимость.
Многие из этих проблем решил бы видеонавигатор, установленный на роботе. Но такое решение способно обеспечить ограниченную зону видимости для навигатора, которую можно расширить лишь установкой на роботе большого количества камер с широкой зоной обзора, что значительно усложняет систему. Кроме того, возникает необходимость установки ряда хорошо различимых наземных меток, по которым такая система могла бы ориентироваться. Естественные природные метки не всегда имеют эти свойства, поэтому нужно явно пометить наземными метками контролируемую территорию. Но взаимная координация роботов и в этом варианте остается нерешенной проблемой. Для ее решения необходимо создание сложной системы технического зрения, которая может позволить реализовать децентрализованную систему распознавания образов на каждом роботе. Децентрализованная система управления совместной деятельностью роботов многократно сложнее и дороже одной централизованной.
На современном уровне развития техники известен патент на полезную модель №131276 «Устройство для координации автоматизированных устройств», опубликованный 20.08.2013, патентная заявка №2012147923 «Способ навигации и совместной координации автоматизированных устройств», опубликованная в 20.05.2014. В отличие от систем, использующих GPS навигаторы, в этом способе перед началом работы робота над контролируемой территорией размещают устройство слежения (одну или несколько камер), причем места и высота подвеса выбирается из условия совместного обзора ими всей контролируемой территории. Т.е. в отличие от GPS систем, которые размещаются независимо от целей координации роботов, устройства слежения размещают именно для удобства координирования роботов. Одновременно, этот способ решает и проблемы GPS, связанные с экранирование и переотражением сигналов от спутников. Следует отметить, что спутники GPS не являются окружением или устройствами слежения за роботами, координаты которых необходимо определить. Наоборот, сами роботы являются устройствами слежения за спутниками GPS, и координаты роботов могут определяться с помощью GPS только на самом роботе и только в том случае, если в его доступной зоне космического пространства находятся одновременно три, либо белее спутников системы GPS. В указанном прототипе эффективность в определении координат (пространственных и угловых) робота достигается за счет использования находящегося сверху устройства слежения (летательное или расположенное на вышке), которое может быть:
1. БПЛА,
2. вышкой-антенной,
3. высотной привязной платформой непрерывного наблюдения (привязные аэростатические дирижабли или шары-зонды),
4. привязные аэродинамические винтокрылые за счет подводимой к винтам электрической энергии (аналогичные привязным вертолетным платформам Hovermast-100 компании Skysapience),
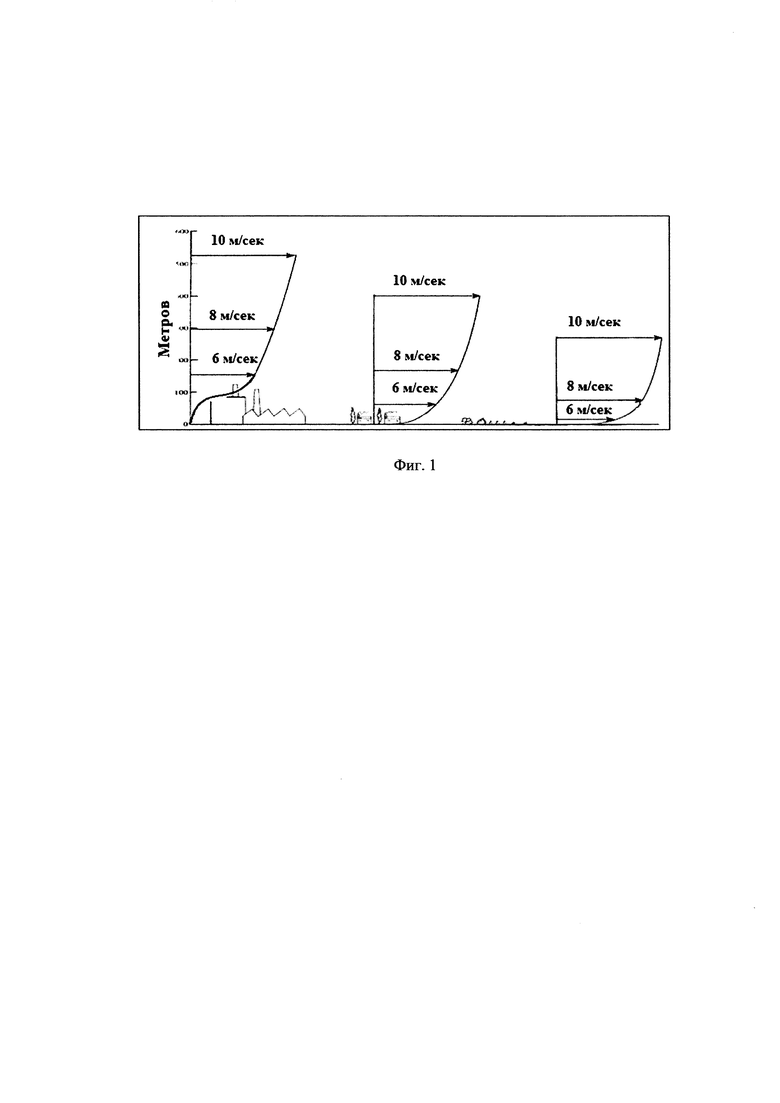
5. привязные винтокрылые летательные аппараты с аэродинамической разгрузкой за счет энергии высотного ветра (авторотация), который всегда присутствует на большой высоте (около 4 м/с на высоте 100 м, Фиг. 1), например, привязные автожиры и гиропланы (аналогичные привязным автожирам Fa330, используемыми во времена второй мировой войны немцами).
Однако каждый из этих методов имеет недостатки:
1) БПЛА дороги и сложны для управления и расчета, имеют ограниченное время непрерывного наблюдения,
2) вышки сложны в установке и размещении или переустановке,
3) привязные аэростатические дирижабли или шары-зонды требуют сложного механизма накачки и неудобны для стабилизации,
4) привязные аэродинамические винтокрылые требуют много энергии,
5) привязные автожиры и гиропланы не летают в отсутствии ветра.
Техническая задача
Технической задачей, на решение которой направлено данное изобретение, является создание способа эффективной координации роботов на основе использования расположенных на вышках или летательных аппаратах устройств слежения за роботами и их окружением на контролируемой территории, включая естественные и искусственные метки. Технический результат совпадает с технической задачей.
Раскрытие изобретения
Для решения указанной задачи предложен способ навигации и совместной координации одного или нескольких роботов, размещенных на контролируемой территории, предполагающий использование по меньшей мере одного устройства слежения за роботами и их окружением, при этом устройства слежения расположены на одной или нескольких подвесных платформах, представляющих собой роторные устройства, способные работать в режимах а) автожира за счет ветра, б) ветряного двигателя, получая энергию от ветра, в) вертолета, получая энергию с наземного заряжающего устройства, естественные или искусственные метки, используют центральный блок расчета, на который поступает информация со всех устройств слежения, для определения координат и ориентации роботов, границ контролируемой и обработанной территорий и препятствий, переключают режимы работы подвесной платформы, представляющей собой роторное устройство, а) в режим ветряного двигателя, заряжая аккумуляторы наземного питающего устройства, когда есть ветер и нет необходимости обработки территории, б) в режим автожира или одновременно автожира и ветряного двигателя, заряжая аккумуляторы, когда есть ветер, и есть необходимость обработки территории, в) в режим вертолета, когда нет ветра, и есть необходимость обработки территории, за счет аккумуляторов.
При реализации способа центральный блок расчета могут размещать либо на подвесной платформе, либо на наземном заряжающем устройстве, либо на самом роботе.
При реализации способа крепят подвесную платформу, представляющую собой роторное устройство, к наземному заряжающему устройству или непосредственно к роботу.
При реализации способа, на земле или на самих роботах можно установить устройства слежения, и эта информация также должна поступать на систему управления.
При реализации способа можно вырабатывать энергию за счет солнечных батарей, установленных на подвесных платформах, земле или на роботах и использовать ее для зарядки соответствующих аккумуляторов, или подводить к роботам или подвесным платформам для полета в режиме вертолета.
При реализации способа используют энергию от подвесных платформ, представляющих собой роторные устройства, которая вырабатывается за счет высотного ветра (авторотации) для создания аэродинамической разгрузки или для зарядки аккумуляторов, или для питания роботов, или для полета в режиме вертолета.
Платформа, представляющая собой роторное устройство, может также использоваться как дрон-охранник для дома или участка.
Краткое описание чертежей
На фиг. 1 изображена диаграмма зависимости силы ветра от высоты для разных типов местности: городской, поселковой и сельской.
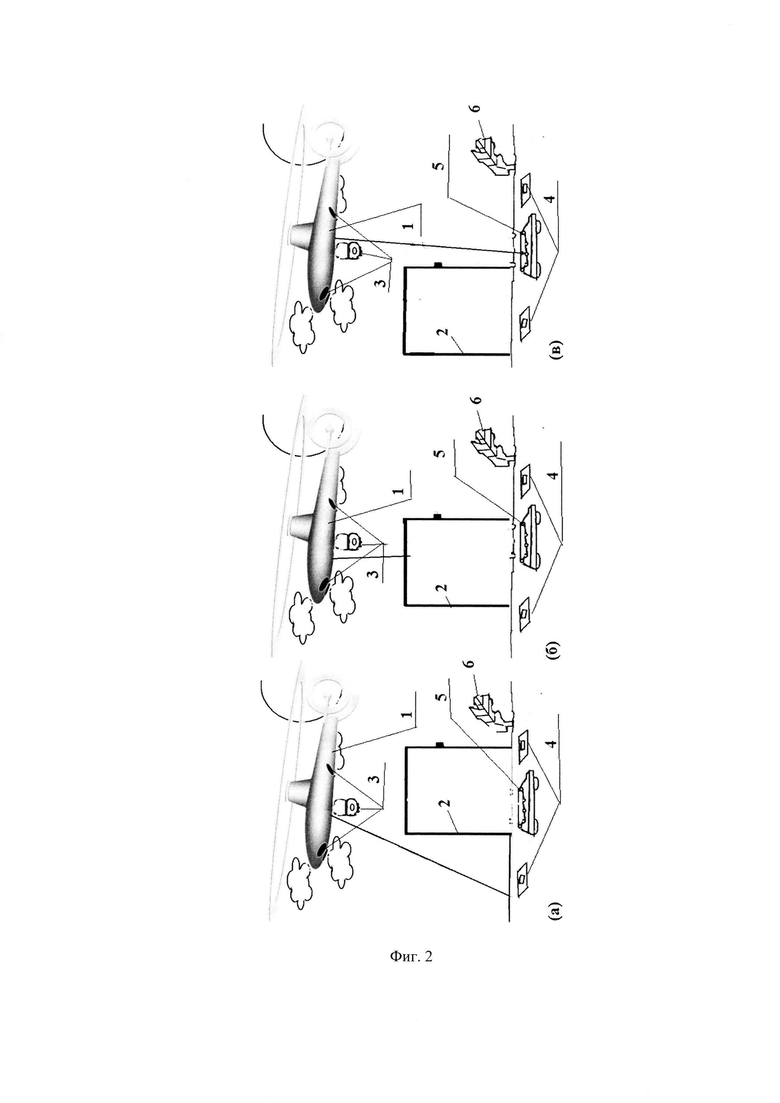
На фиг. 2 изображены варианты реализации решения. При этом используются следующие обозначения: привязной беспилотный летательный аппарат (привязной БПЛА) 1, зарядное и управляющее устройство 2 с камерой (камерами) 3; метки на земле 4 и на роботе 5; естественный ориентир - куст 6.
Осуществление изобретения
Для решения поставленной задачи предложен способ навигации и совместной координации одного или нескольких роботов, размещенных на контролируемой территории, путем формирования маршрутизации каждого робота по информации о координатах препятствий, естественных или искусственных меток, границ уже обработанной территории, границ контролируемой территории и всех роботов на этой территории.
Способ предполагает, что перед началом работы системы, с целью обеспечения работы роботов на контролируемой территории, над этой территорией размещают одну или несколько подвесной платформ с устройством слежения, При этом по крайней мере одна из упомянутых подвесных платформ выполнена в виде роторного устройства, которое способно работать в режиме автожира за счет набегающего ветра, в режиме ветряного двигателя, получая энергию от набегающего ветра, и в режиме вертолета, получая энергию от наземного заряжающего устройства.
Причем, когда есть ветер и нет необходимости обработки территории, подвесная платформа работает в режиме ветряного двигателя, заряжая аккумуляторы. Когда есть ветер и есть необходимость обработки территории, подвесная платформа работает в режиме автожира или одновременно автожира и ветряного двигателя, заряжая аккумуляторы. Когда нет ветра и есть необходимость обработки территории, подвесная платформа работает в режиме вертолета за счет энергии аккумуляторов.
Причем централизованная система снабжена центральным блоком расчета, который расположен либо на подвесной платформе, либо на земле, либо на наземном заряжающем устройстве, либо на роботе, выполненным с возможностью определения координат, ориентации элементов системы и формирования управляющих команд на основе информации, полученной от всех описанных выше устройств.
Таким образом, во всех описанных вариантах при реализации данного изобретения создается централизованная система управления роботами и, именно за счет этого, повышается точность определения их координат (пространственных и угловых).
Использование подвесных платформ, представляющих собой роторные устройства, с устройствами слежения, которые могут работать в трех разных режимах: режиме автожира, режиме ветряного двигателя, режиме вертолета, позволяет обеспечивать эффективную координацию роботов и наблюдения за их окружением, включая естественные и искусственные метки. Использование описанных трех режимов позволяет дополнять каждый и компенсировать недостатки каждого отдельно взятого режима.
Способ поясняется на фиг. 2, где изображены три возможных варианта (а, б, в) реализации предложенного способа. На подвесной платформе стоят фиксированные камеры охвата всей нижней полусферы. Это дешевле одной управляемой камеры, а проводной канал связи (оптоволокно или витая пара) надежен и емок. Можно разместить несколько камер, как на привязной платформе, так и на ее подвесе - на необходимой малой высоте. Подвесные платформы крепятся к земле (фиг. 2а), или к наземному заряжающему устройству, предназначенному для аккумуляции и выдачи энергии (фиг. 2б), или непосредственно к одному из роботов на контролируемой территории (фиг. 2в).
Энергия по предложенному способу может дополнительно вырабатываться и за счет солнечных батарей, установленных на подвесной платформе, на земле или на роботах.
В предлагаемом решении может использоваться как относительное (дифференциальное) видеопозиционирование роботов относительно участка, так и относительно летательного аппарата (вышки). Для координации работы роботов с летательного аппарата (вышки) не всегда нужно знать координаты самой подвесной платформы с устройством слежения. Возможно точное (относительное) позиционирование роботов относительно 3 и более специальных меток, фиксированных наземных объектов и других наземных роботов.
Точные координаты подвесной платформы не является достаточным для точного определения координат наземных роботов. Однако эти координаты (положение и ориентация) могут потребоваться для коррекции проекционных искажений полученных изображений.
Возможно пассивное видеонаблюдение при естественном и искусственном освещении. Всепогодность обеспечивает инфракрасное и радиолокационное зрение, пассивные отражатели и активные инфракрасные метки, инфракрасные светодиоды и пр.
Использование нескольких камер наблюдения над контролируемой территорией (разные комбинации фиксированных и на привязных высотных платформах) повышают надежность, стереоскопическую точность позиционирования, устраняет мертвые зоны (например за и под деревьями).
Для повышения точности на роботе и на его заряжающем устройстве, на самой земле можно установить легко различимые сверху метки.
Центральный блок расчета, на который поступает информация со всех устройств слежения, определяет координаты и ориентацию контролируемого по меньшей мере одного робота (как относительное (дифференциальное) видеопозиционирование роботов относительно участка, так и относительно устройств (камер) слежения, и, если необходимо, определяет координаты и ориентацию устройств слежения. Причем упомянутый блок выполнен с возможностью передачи управляющих команд и сигналов (в том числе и RF) на роботы, на устройства слежения, на зарядные устройства, а также обеспечивает возможность обменауправляющими и информационными сигналами между ними.
Если роботов несколько, то их координация проста - камеры видят всех одновременно, и единая компьютерная система, получающая эту информацию, координирует их взаимное движение. Задать границы контролируемой территории для роботов (например, границу покоса для газонокосилки) можно, обозначив границы на экране компьютерной системы по изображению участка местности (например, при помощи стрелки мыши, или нарисовать сенсорным карандашом или пальцем на экране).
Система, реализованная по приложенному способу, работает следующим образом: перед началом работы системы размещают, по меньшей мере, одного робота на контролируемой территории (например, на газоне). Перед началом работы робота над контролируемой территорией размещают устройства слежения (одну или несколько камер) на подвесных платформах или на вышках, причем места и высота подвеса выбираются из условия обеспечения ими обзора всей контролируемой территории.
Также возможно, что устройство слежения в начале работы расположено на земле или на одном из роботов, а затем в процессе работы может взлетать, летать или садиться на вышки для наблюдения за роботами на контролируемой территории.
Можно также разместить устройства слежения за привязными платформами на земле и на роботах, что позволяет определить взаимное положение и ориентацию устройств слежения на подвесных платформах и роботов, а также более точно определить угол вращения робота и найти положение робота в мертвых зонах камер (под навесами или под деревьями) путем ориентации по потолку навесов или листвы деревьев, видимых сверху над роботом.
Кроме того, вместо видимого сигнала можно использовать и другие участки спектра. Причем, сигнал может быть не только естественным, но и сгенерированным роботом или устройством на камере или в иной точке пространства. Можно использовать звуковые, ультразвуковые сигналы, радиолокацию, сенсорные датчики и метки (например, запаховые или химические сигналы или радиоактивность, немного превышающую фоновый уровень (кремниевые пластины, например)).
Используемая в предложенном способе система наблюдения, способна обнаруживать возникшие препятствия или движущиеся объекты, способна определять степень и качество покоса травы. Она проста в реализации и имеет низкую себестоимость.
Предложенный способ можно использовать для широкого класса роботов: автоматизированные газонокосилки, внутрикомнатные роботы-уборщики, трактора, снегоуборочные, мусороуборочные, поливальные машины, машины для перевозки людей и грузов, сельскохозяйственные машины, коммунальная техника, транспорт и прочее. Предложенный способ можно использовать для внеземных роботов на других планетах, например, для марсоходов.
Система легко укладывается в рамки «умного» дома или даже «умного» города, позволяя координировать одновременно много действий роботов и других объектов управления, а также решать сразу много задач -например, не только навигации, но и распознавания.
Изобретение было раскрыто выше со ссылкой на конкретный вариант его осуществления. Для специалистов могут быть очевидны и иные варианты осуществления изобретения, не меняющие его сущности, как она раскрыта в настоящем описании. Соответственно, описание изобретения следует считать ограниченным по объему только нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И РАЗМЕТКИ УЧАСТКОВ ТЕРРИТОРИИ С ХИМИЧЕСКИМ И РАДИОАКТИВНЫМ ЗАРАЖЕНИЕМ | 2017 |
|
RU2661295C1 |
| Комплекс распределенного управления интеллектуальными роботами для борьбы с беспилотными аппаратами | 2024 |
|
RU2838977C1 |
| СПОСОБ И СИСТЕМА АНТЕННЫХ ИЗМЕРЕНИЙ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ПРИВЯЗНОГО АЭРОСТАТА | 2023 |
|
RU2818996C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| СПАСАТЕЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2020 |
|
RU2752769C1 |
| Универсальный комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами | 2023 |
|
RU2817740C1 |
| РОТОР "ВОЗДУШНОЕ КОЛЕСО". ГИРОСТАБИЛИЗИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ИСПОЛЬЗУЮЩИЕ РОТОР "ВОЗДУШНОЕ КОЛЕСО", НАЗЕМНОЕ/ПАЛУБНОЕ УСТРОЙСТВО ИХ ЗАПУСКА | 2013 |
|
RU2538737C9 |
| ПАРНЫЙ АЭРОЭНЕРГОСТАТ | 2022 |
|
RU2781209C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
Изобретение относится к координации наземных подвижных автоматизированных устройств, в частности роботов, размещенных на контролируемой территории. Используют по меньшей мере одно устройство слежения за роботами. Устройства слежения располагают на подвесных платформах, представляющих собой роторные устройства, способные работать в режимах автожира, ветряного двигателя, вертолета. Информация со всех устройств слежения поступает на центральный блок расчета для определения координат роботов, координат препятствий, границ контролируемой и обработанной территорий. Подвесную платформу переключают в режим ветряного двигателя, заряжая аккумуляторы, когда есть ветер и нет необходимости обработки территории, в режим автожира или одновременно автожира и ветряного двигателя, заряжая аккумуляторы, когда есть ветер и есть необходимость обработки территории, в режим вертолетного двигателя, когда нет ветра и есть необходимость обработки территории. В результате обеспечивается эффективная навигация и координация роботов на контролируемой территории. 4 з.п. ф-лы, 2 ил.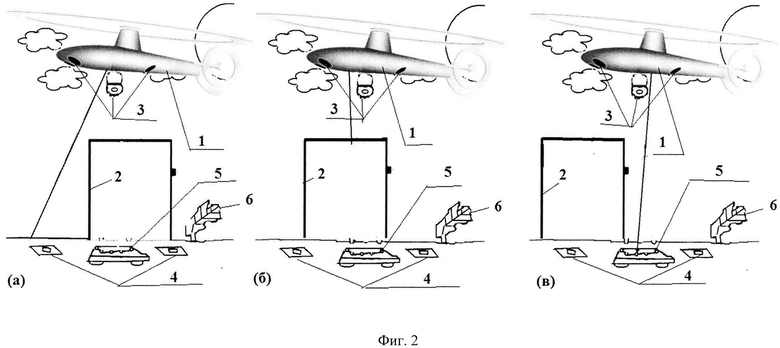
1. Способ навигации и взаимной координации роботов, предназначенных для совместной работы на контролируемой территории, включающий использование системы управления роботами, имеющей по меньшей мере одно устройство слежения за роботами, отличающийся тем, что располагают устройства слежения за роботами на подвесных платформах в виде роторных устройств, имеющих возможность работы в режиме автожира или ветряного двигателя, получающих энергию от ветра, или в режиме вертолета, получающего энергию от наземного заряжающего устройства, используют центральный блок расчета координат роботов, координат препятствий, границ контролируемой территории и обработанной территории на основе координат естественных и искусственных меток для передачи управляющих команд на роботы и на устройства слежения для обмена управляющими и информационными сигналами между ними, при этом переключают режим подвесных платформ при наличии ветра и при отсутствии необходимости обработки контролируемой территории роботами в режим ветряного двигателя, который обеспечивает зарядку аккумулятора наземного заряжающего устройства, при наличии ветра и при необходимости обработки контролируемой территории роботами – в режим автожира или одновременно автожира и ветряного двигателя, который обеспечивает зарядку аккумулятора наземного заряжающего устройства, а при отсутствии ветра и при необходимости обработки контролируемой территории роботами - в режим вертолета путем использования энергии аккумуляторов наземного заряжающего устройства.
2. Способ по п. 1, отличающийся тем, что центральный блок расчета размещают на подвесной платформе, или на земле, или на наземном заряжающем устройстве, или на роботе.
3. Способ по п. 1, отличающийся тем, что подвесную платформу закрепляют на наземном заряжающем устройстве или на самом роботе.
4. Способ по п. 1, отличающийся тем, что используют энергию солнечных батарей, установленных на подвесных платформах, или на земле, или на наземном заряжающем устройстве, или на роботах, в качестве энергии для зарядки аккумуляторов или для полета в режиме вертолета.
5. Способ по любому из пп. 1-4, отличающийся тем, что используют энергию от подвесных платформ, представляющих собой роторные устройства, для создания аэродинамической разгрузки, зарядки аккумуляторов, питания заражающих устройств роботов или для полета в режиме вертолета, которую вырабатывают посредством набегающего потока воздуха.
| RU 2012147923 A, 20.05.2014 | |||
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2119172C1 |
| КОМПЛЕКС ДЛЯ АВИАЦИОННЫХ ХИМИЧЕСКИХ РАБОТ | 2007 |
|
RU2342284C2 |
| CN 103249386 A, 14.08.2013. | |||

