Изобретение относится к робототехнике и, в частности, к системам управления манипуляторами, имеющими избыточную степень подвижности и конструктивные ограничения перемещения во вращательных степенях подвижности.
Известен способ управления шестистепенным манипулятором, имеющим блок задания программных значений, формирующий параметры перемещения рабочих инструментов манипулятора в пространстве, и вычислительное устройство, на вход которого поступают указанные параметры перемещения рабочих инструментов, а на выходе формируются программные значения всех обобщенных координат манипулятора (В.Ф. Филаретов, Ю.К. Алексеев, А.В. Лебедев. Системы управления подводными роботами. Москва. Круглый год. 2001, стр. 184-207).
Недостатками этого способа является то, что в процессе работы манипулятора ввиду неизбежных ограничений на диапазоны изменения его обобщенных координат, а также при использовании аналитических соотношений для согласованного формирования всех обобщенных координат в функции времени, содержащих разрывные функции (при решении обратных задач кинематики) часто появляются заранее непредвиденные переброски (реверсы) в некоторых его степенях подвижности, приводящие к сходу рабочих инструментов с предписанных траекторий, а в результате - к появлению брака или созданию аварийных ситуаций.
Известен также способ управления манипулятором, имеющим шесть степеней подвижности, включающий формирование с помощью программного устройства входных сигналов для следящих приводов всех его шести степеней подвижности, обеспечивающих перемещение рабочего инструмента манипулятора в абсолютной системе координат (Медведев B.C., Лесков А.Г., Ющенко А. С.Системы управления манипуляционных роботов. М.: Наука, 1978. С. 2-31). Этот способ является наиболее близким к предлагаемому изобретению.
Однако его нельзя использовать, когда программные сигналы, формируемые программным устройством, не являются жестко заданными, а непрерывно строятся на основе информации, получаемой от систем технического зрения, непосредственно во время выполнения технологических операций с объектами, произвольно расположенными в рабочей зоне манипулятора. В этом случае при непредсказуемом выходе в процессе выполнения операций хотя бы одной из степеней подвижности манипулятора на ограничения происходит останов манипулятора или неожиданный переброс в его степенях подвижности (непредвиденное скачкообразное перемещение (вращение) на большой угол), связанный с принятием нового положения в этих степенях подвижности для продолжения технологической операции. На это требуется значительное время, обусловленное инерционностью приводов. Однако во время переброса остальные степени подвижности манипулятора продолжают отработку программных сигналов. Это, как и в аналоге, приводит к сходу рабочего инструмента манипулятора с предписанной траектории и к браку (или авариям) в процессе выполнения запланированных работ.
Задачей, на решение которой направлено предлагаемое техническое решение, является устранение указанного выше недостатка и, в частности, сохранение заданной точности (качества) безостановочного выполнения всех предписанных манипуляционных операций, когда этой неожиданной переброски в процессе выполнения требуемых технологических операций вообще никогда не возникает ни в одной степени подвижности манипулятора.
Технический результат, получаемый при решении поставленной задачи, заключается в сохранении заданной точности (качества) выполнения всех предписанных манипуляционных операций за счет введения дополнительной (избыточной) степени подвижности манипулятора и дополнительной системы управления этой степенью, которые полностью исключают остановки манипулятора или возникновение режимов неожиданных перебросок во всех его вращательных степенях подвижности в процессе выполнения любых манипуляционных операций.
Поставленная задача решается тем, что способ управления манипулятором, имеющим шесть степеней подвижности, включающий формирование с помощью программного устройства входных сигналов для следящих приводов всех его шести степеней подвижности, обеспечивающих перемещение рабочего инструмента манипулятора в абсолютной системе координат, отличается тем, что манипулятор снабжают системой технического зрения жестко связанной с абсолютной системой координат и с программным устройством, выполненной с возможностью передачи в него информации о пространственных координатах в абсолютной системе координат мест обработки рабочим инструментом манипулятора, и снабжают избыточной седьмой степенью подвижности снабженной дополнительным следящим приводом, выполненным с возможностью расширения рабочей зоны манипулятора и увеличения его угла сервиса, а также вспомогательной системой управления, выполненной с возможностью дополнительного перемещения основания манипулятора посредством избыточной степени подвижности в абсолютной системе координат, которое реализуют с учетом текущих значений его шести степеней подвижности, с помощью избыточной степени подвижности а программное устройство при формировании программных сигналов для шести степеней подвижности манипулятора учитывает текущее перемещение в абсолютной системе координат его избыточной седьмой степени подвижности.
Сопоставительный анализ существенных признаков заявляемого способа с существенными признаками аналогов и прототипа свидетельствует о его соответствии критерию «новизна».
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак, указывающий, что «манипулятор снабжают системой технического зрения, механически жестко связанной с абсолютной системой координат и с программным устройством, выполненной с возможностью передачи в него информации о пространственных координатах в абсолютной системе координат мест обработки рабочим инструментом манипулятора» обеспечивает возможность определения пространственного расположения мест обработки с помощью манипулятора объектов манипулирования, расположение и ориентация которых в абсолютной системе координат заранее неизвестны.
Признак, указывающий, что этот манипулятор снабжен «избыточной седьмой степенью подвижности, снабженной дополнительным следящим приводом, выполненным с возможностью расширения рабочей зоны манипулятора и увеличения его угла сервиса», обеспечивает возможность такого дополнительного перемещения основания манипулятора в горизонтальной плоскости, при котором всегда удается обеспечивать плавное движение рабочих инструментов по предписанным траекториям с заданной ориентацией в пространстве без выхода степеней подвижности этого манипулятора на ограничения и без необходимости совершения непредвиденных перебросок в его степенях подвижности из одного конечного положения в другое.
Признак «…а также вспомогательной системой управления, выполненной с возможностью дополнительного перемещения основания манипулятора посредством избыточной степени подвижности в абсолютной системе координат…» обеспечивает формирование сигналов управления для конкретного перемещения в избыточной степени подвижности манипулятора.
Признак, указывающий, что дополнительное перемещение основания манипулятора в абсолютной системе координат «реализуют с учетом текущих значений его шести степеней подвижности, с помощью избыточной степени подвижности в направлении и на величину, исключающую подход любой степени подвижности манипулятора к соответствующему этой степени подвижности предельному значению» показывает, что за счет дополнительного перемещения основания манипулятора в абсолютной системе координат удается исключить подход любой степени его подвижности к своему предельному значению. Это, в свою очередь, исключает непредвиденные остановки манипулятора из-за вывода этих степеней подвижности на ограничения или к неожиданным переброскам в этих степенях подвижности, которые могут привести к возникновению аварийных ситуаций.
Признак «…а программное устройство при формировании программных сигналов для шести степеней подвижности манипулятора учитывает текущее перемещение в абсолютной системе координат его избыточной седьмой степени подвижности» показывает, что программное устройство в процессе формирования программных сигналов на все степени подвижности манипулятора учитывает и движение в его избыточной степени подвижности.
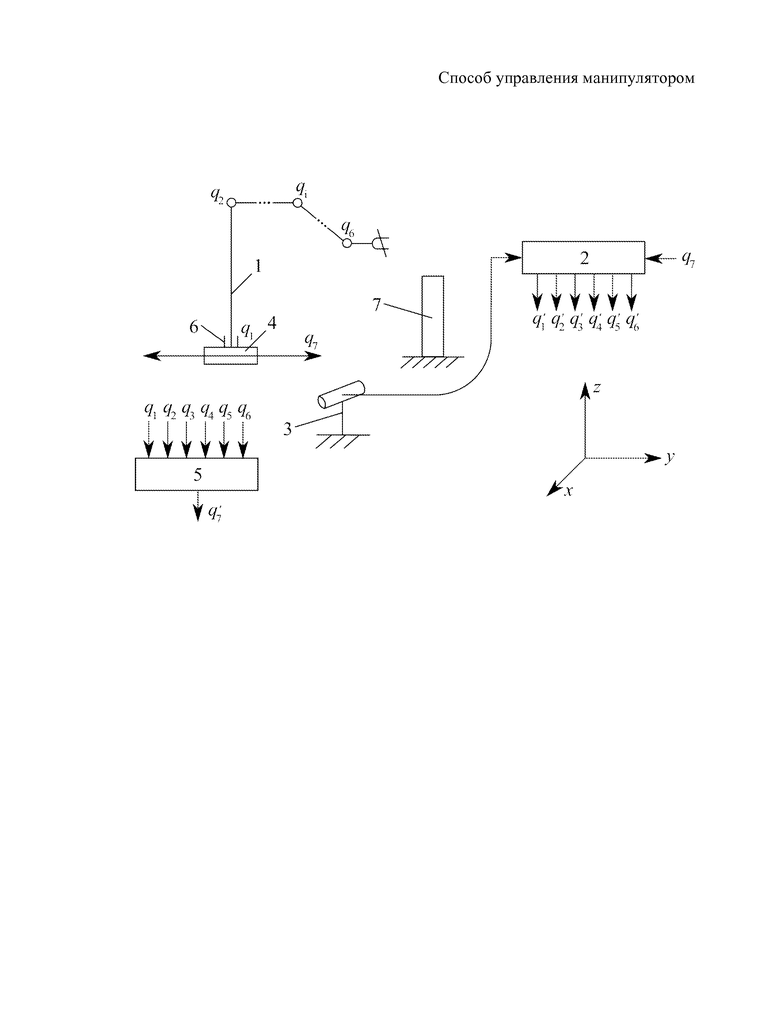
На фиг. 1 схематически показан типовой шести степенной манипулятор, с помощью которого может выполняться любая обработка (или технологические операции) детали или изделия, произвольно (заранее неизвестно) расположенных в пространстве.
На фиг 1. введены следующие обозначения: 1 - манипулятор; 2 - программное устройство, формирующее программные сигналы  (
( ) для соответствующих следящих приводов манипулятора; qi () текущие значения соответствующих степеней подвижности манипулятора; 3 - система технического зрения; 4 - избыточная степень подвижности манипулятора с дополнительным следящим приводом; 5 - вспомогательная система управления; 6 - основание манипулятора; 7 - объект манипулирования;
) для соответствующих следящих приводов манипулятора; qi () текущие значения соответствующих степеней подвижности манипулятора; 3 - система технического зрения; 4 - избыточная степень подвижности манипулятора с дополнительным следящим приводом; 5 - вспомогательная система управления; 6 - основание манипулятора; 7 - объект манипулирования;  , q7 - соответственно, программное и текущее значения седьмой избыточной степени подвижности манипулятора; XYZ - абсолютная система координат.
, q7 - соответственно, программное и текущее значения седьмой избыточной степени подвижности манипулятора; XYZ - абсолютная система координат.
Заявленный способ реализуется следующим образом.
Вначале с помощью системы технического зрения 3, жестко закрепленной с известными координатами в абсолютной системе координат (СК), сканируют объект манипулирования 7 и передают пространственные координаты мест ее обработки относительно системы технического зрения 3 в программное устройство 2, в которое также подают текущее значение обобщенной координаты q7.
Затем в программном устройстве 2 (с учетом известных координат установки системы технического зрения 3 в абсолютной СК) с учетом текущего значения q7 происходит автоматическая привязка полученных в абсолютной СК координат мест обработки объекта манипулирования 7 к СК манипулятора 1. После этого начинают обработку объекта манипулирования 7, непрерывно определяя во вспомогательной системе 5 управления близость соответствующих степеней подвижности манипулятора 1 к их предельным значениям, при которых начинается режим их непредвиденной переброски или происходит остановка манипулятора 1 ввиду невозможности продолжения его работы по причине выхода любой его основной степени подвижности на ограничения. В системе 5 управления формируют значение , которое может оставаться постоянным, если выполняемые технологические операции с объектом манипулирования 7 не приводят к указанным выше негативным последствиям, или изменяется, если какая - либо из степеней подвижности манипулятора 1 приближается к своему предельному значению. Причем координата может изменяться непрерывно или дискретно (при изменении мест обработки объекта манипулирования 7) в зависимости от размеров звеньев манипулятора 1 и выбранного алгоритма управления его избыточной степенью подвижности.
При изменении координаты в горизонтальной плоскости начинает перемещаться основание 6 манипулятора 1 и изменяться координата q7, которую измеряют и подают в программное устройство 2, которое с учетом текущего значения величины q7 пересчитывает координаты () в СК манипулятора 1, с учетом соответствующего изменения положения его основания 6 в абсолютной СК, в которой остаются неизменными отсканированные с помощью системы 3 технического зрения координаты мест обработки объекта манипулирования 7.
Если объект манипулирования 7 в промежутках между обработкой изменяет свое положение и ориентацию, то при каждом изменении производят новое сканирование мест ее обработки с помощью системы 3 технического зрения, и весь описанный выше процесс повторяется. Указанный способ управления манипулятором сохраняется в течение всего времени обработки объекта манипулирования 7.
Техническая реализация предложенного способа обработки любых объектов манипулирования 7 не вызывает принципиальных затруднений, поскольку в нем используются типовые технические элементы и устройства.
Изобретение относится к робототехнике и, в частности, к системам управления манипуляторами, имеющими избыточную степень подвижности и конструктивные ограничения перемещения во вращательных степенях подвижности. Изобретение обеспечивает сохранение заданной точности выполнения всех предписанных манипуляционных операций за счет введения дополнительной избыточной степени подвижности манипулятора и дополнительной системы управления этой степенью, которые полностью исключают возникновение режимов неожиданных перебросок во всех его вращательных степенях подвижности в процессе выполнения любых манипуляционных операций. 1 ил.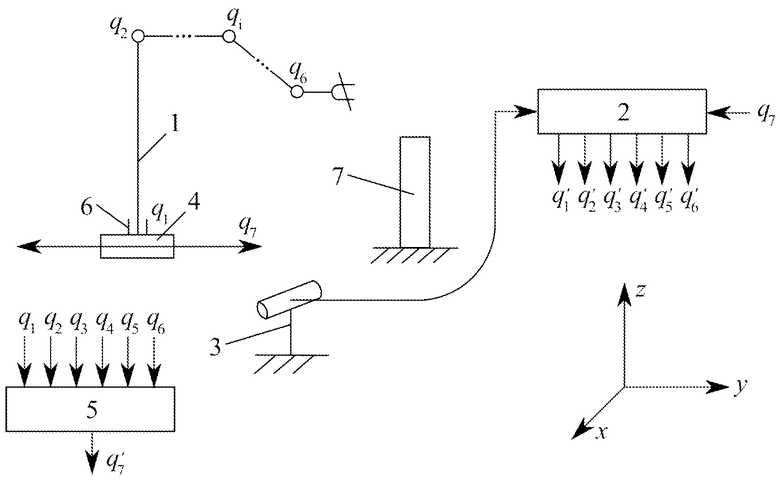
Способ управления манипулятором, имеющим шесть степеней подвижности, программное устройство, избыточную седьмую степень подвижности, снабженную дополнительным следящим приводом, вспомогательную систему управления и систему технического зрения, жестко связанную с абсолютной системой координат и с программным устройством, характеризующийся тем, что осуществляют формирование с помощью программного устройства входных сигналов для следящих приводов всех его шести степеней подвижности, обеспечивающих перемещение рабочего инструмента манипулятора в абсолютной системе координат и передачу с помощью системы технического зрения в программное устройство информации о пространственных координатах в абсолютной системе координат мест обработки рабочим инструментом манипулятора, при этом дополнительный следящий привод избыточной седьмой степени подвижности выполняют с возможностью обеспечения расширенной рабочей зоны манипулятора и увеличенного его угла сервиса, а вспомогательную систему управления - с возможностью дополнительного перемещения основания манипулятора посредством избыточной степени подвижности в абсолютной системе координат, которое реализуют с учетом текущих значений его шести степеней подвижности с помощью избыточной седьмой степени подвижности, и осуществляют учет посредством программного устройства текущего перемещения в абсолютной системе координат его избыточной седьмой степени подвижности при формировании программных сигналов для шести степеней подвижности манипулятора.
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| US 20110022216 A1, 27.01.2011 | |||
| 0 |
|
SU323278A1 | |

