Изобретение относится к робототехнике и может быть использовано при создании контурных систем управления многостепенными манипуляторами.
Известен способ управления рабочим органом шестистепенного манипулятора, заключающийся в том, что посредством блока задания желаемых значений в реальном масштабе времени формируют текущие значения проекций первого вектора положения рабочего органа манипулятора на оси абсолютной системы координат и проекций на те же оси взаимно перпендикулярных второго и третьего векторов, определяющих его ориентацию в абсолютной системе координат, а также с использованием желаемых значений девяти изменяющихся во времени проекций трех указанных векторов посредством блока расчета на основе известных аналитических зависимостей решения обратной задачи кинематики для конкретной конструкции указанного манипулятора определяют шесть изменяющихся во времени желаемых значений обобщенных координат манипулятора, которые подают на входы его шести соответствующих следящих приводов, обеспечивая перемещение и пространственную ориентацию его рабочего органа в абсолютной системе координат в соответствии с текущими желаемыми значениями девяти элементов первого, второго и третьего векторов (Филаретов В.Ф., Алексеев Ю.К., Лебедев А.В. Системы управления подводными роботами. Издательский дом «Круглый год». - М.:2001. С.179-201).
Недостатком этого способа является то, что он позволяет манипулятору выполнять произвольные технологические операции с заданной (произвольной) ориентацией его рабочего органа (с полным углом сервиса) только в очень ограниченной рабочей зоне. Поэтому для крупногабаритных объектов работ использование указанного способа сильно ограничено.
Известен также способ управления многостепенным манипулятором, заключающийся в том, что посредством блока задания желаемых значений, в памяти которого хранится информация о пространственных координатах мест обработки рабочим органом многостепенного манипулятора объектов в абсолютной системе координат, оси которой в начале работы манипулятора совпадают с осями связанной с ним системы координат, в реальном масштабе времени формируют три текущие значения проекций первого вектора положения конечной точки рабочего органа манипулятора на оси абсолютной системы координат и шесть проекций на те же оси взаимно перпендикулярных второго и третьего векторов, точки начала которых совпадают с выбранной конечной точкой рабочего органа многостепенного манипулятора, а направления задают его ориентацию в абсолютной системе координат в процессе выполнения этим рабочим органом требуемых технологических операций, при этом посредством блока расчета на основе известных аналитических зависимостей решения обратной задачи кинематики для конкретной конструкции используемого многостепенного манипулятора формируют текущие желаемые значения всех его обобщенных координат, которые подают на входы соответствующих следящих приводов, обеспечивающих соответствующие изменения конкретных обобщенных координат, а, следовательно, и желаемое перемещение, и пространственную ориентацию его рабочего органа в связанной с этим манипулятором системе координат в соответствии с текущими желаемыми значениями элементов первого, второго и третьего векторов, для исключения появления непредвиденных перебросов в некоторых степенях подвижности манипулятора, обусловленных их конструктивными ограничениями, используют дополнительные индикаторы, которые определяют близость соответствующих обобщенных координат манипулятора к их ограничениям, и формируют сигналы, используемые для дополнительного линейного перемещения основания манипулятора в абсолютной системе координат (Филаретов В.Ф., Губанков А.С., Горностаев И.В., Коноплин А.Ю. Разработка метода формирования программных сигналов управления манипуляторами, установленными на подводных аппаратах. Подводные исследования и робототехника. 2018. №1. С.30-37).
Этот способ по своей сущности является наиболее близким к предлагаемому изобретению и принят за прототип. Однако при его реализации решается другая задача. Ее решение не позволяет непрерывно выполнять манипуляционные операции, когда некоторые объекты работ значительно разнесены в трехмерном пространстве, когда некоторые части протяженных объектов находятся за пределами текущей рабочей зоны для всех степеней подвижности манипулятора или когда некоторые операции не могут быть выполнены его рабочим органом при ограничениях углов сервиса в конкретной точке объектов работ. Для непрерывного выполнения заданных работ на всех объектах, включая протяженные, необходимо обеспечить любое автоматическое смещение рабочего органа манипулятора в пространстве в соответствии с текущими желаемыми значениями элементов трех векторов, заданных в абсолютной системе координат (АСК) и формируемых с использованием блока задания желаемых значений.
Задачей заявляемого изобретения является устранение указанных выше недостатков и, в частности, обеспечение автоматического перемещения многостепенного манипулятора вместе с его связанной системой координат (ССК) в трехмерном пространстве таким образом, чтобы рабочий орган, располагаясь в соответствии с задаваемыми в АСК желаемыми значениями элементов трех векторов, всегда выполнял технологические операции на отдельно расположенных удаленных друг от друга или протяженных объектах до завершения очередного цикла работ без дополнительной ручной переустановки манипулятора или объектов работ в трехмерном пространстве.
Технический результат изобретения заключается в автоматическом перемещении многостепенного манипулятора вместе с его связанной системой координат в трехмерном пространстве, если возможности расположения его рабочего органа перестают соответствовать желаемым значениям элементов векторов, формируемым с использованием блока задания желаемых значений в АСК.
Поставленная задача решается тем, что способ управления многостепенным манипулятором, заключающийся в том, что посредством блока задания желаемых значений, в памяти которого хранится информация о пространственных координатах мест обработки рабочим органом многостепенного манипулятора объектов в абсолютной системе координат, оси которой в начале работы манипулятора совпадают с осями связанной с ним системы координат, в реальном масштабе времени формируют три текущие значения проекций первого вектора положения конечной точки рабочего органа манипулятора на оси абсолютной системы координат и шесть проекций на те же оси взаимно перпендикулярных второго и третьего векторов, точки начала которых совпадают с выбранной конечной точкой рабочего органа многостепенного манипулятора, а направления задают его ориентацию в абсолютной системе координат в процессе выполнения этим рабочим органом требуемых технологических операций, при этом посредством блока расчета на основе известных аналитических зависимостей решения обратной задачи кинематики для конкретной конструкции используемого многостепенного манипулятора формируют текущие желаемые значения всех его обобщенных координат, которые подают на входы соответствующих следящих приводов, обеспечивающих соответствующие изменения конкретных обобщенных координат, а, следовательно, и желаемое перемещение, и пространственную ориентацию его рабочего органа в связанной с этим манипулятором системе координат в соответствии с текущими желаемыми значениями элементов первого, второго и третьего векторов, отличается тем, что если очередные части обрабатываемого объекта или другие объекты находятся вне заранее сформированной неизменной рабочей зоны манипулятора, определенной в связанной системе координат, то посредством блока расчета с учетом очередных желаемых значений элементов первого, второго и третьего векторов и сохраненной в его памяти информации о рабочей зоне определяют направления и величины требуемых дополнительных линейных пространственных смещений всего манипулятора вместе с его связанной системой координат параллельно одной, двум или сразу трем осям абсолютной системы координат и дискретно обеспечивают эти смещения с помощью соответствующих механизмов, сохраняя параллельность осей двух указанных систем координат для попадания еще не обработанных частей протяженных объектов или новых объектов в рабочую зону многостепенного манипулятора, в которой возможно произвольное расположение его рабочего органа в соответствии с формируемыми посредством блока задания желаемых значений величинами элементов первого, второго и третьего векторов в абсолютной системе координат, указанные смещения обеспечивают с помощью трех дополнительных линейных степеней подвижности, управляемых соответствующими тремя дополнительными следящими приводами, при этом после завершения очередных дополнительных линейных пространственных смещений многостепенного манипулятора вычисления всех его обобщенных координат, осуществляемые посредством блока расчета, продолжают выполнять в его связанной системе координат, в которой полностью сохраняют форму рабочей зоны манипулятора, одновременно учитывая все его уже выполненные дополнительные линейные пространственные смещения параллельно осям абсолютной системы координат без какой-либо коррекции текущих желаемых сигналов, сформированных посредством блока задания желаемых значений, ориентированных только на абсолютную систему координат, при этом обеспечивают два возможных варианта управления манипулятором во время его дополнительных линейных пространственных смещений вдоль осей абсолютной системы координат, первый используется тогда, когда происходит обработка протяженных объектов, не помещающихся целиком в рабочую зону манипулятора, в этом случае при достижении конечной точкой рабочего органа своего заданного крайнего положения в рабочей зоне манипулятора посредством блока расчета формируют сигнал, с учетом которого стабилизируют желаемые значения, формируемые с использованием блока задания желаемых значений, для сохранения положения и ориентации рабочего органа во время указанных линейных пространственных смещений манипулятора вдоль осей абсолютной системы координат, при этом посредством блока расчета продолжают непрерывно решать обратную задачу кинематики манипулятора и полученные при указанном решении сигналы в связанной системе координат отрабатывают его соответствующими следящими приводами с учетом указанных текущих дополнительных линейных пространственных смещений манипулятора вместе с его рабочей зоной в абсолютной системе координат, изменяя конфигурацию соответствующих частей манипулятора по мере его смещений, после завершения линейного пространственного смещения всего многостепенного манипулятора, при котором продолжают сохранять заданное положение и ориентацию его рабочего органа в абсолютной системе координат, посредством блока расчета формируют новый сигнал, и направляют его на соответствующий вход блока задания желаемых значений, при этом на его соответствующих девяти выходах после стабилизации продолжают формировать новые желаемые значения, которые продолжают обеспечивать желаемое перемещение конечной точки рабочего органа в связанной системе координат в процессе продолжения решения обратной задачи кинематики многостепенного манипулятора после завершения выполнения всех его дополнительных линейных пространственных смещений, при втором варианте, когда после полного выполнения операций на текущем объекте рабочий орган вместе с многостепенным манипулятором по командам, формируемым посредством блока задания желаемых значений, перемещают к следующему удаленному объекту, расположенному вне рабочей зоны манипулятора, с использованием блока расчета опять подают сигнал, с учетом которого желаемые значения, формируемые посредством блока задания желаемых значений, стабилизируют до попадания очередного объекта в рабочую зону манипулятора с заданной ориентацией его рабочего органа, после отработки величин дополнительных линейных пространственных смещений многостепенного манипулятора вместе с его рабочей зоной, формируемых посредством блока расчета, когда ошибки всех следящих приводов этого манипулятора обнулятся, с использованием блока расчета формируют новый сигнал, с учетом которого желаемые значения, формируемые посредством блока задания желаемых значений, продолжают изменяться, обеспечивая требуемую обработку очередного объекта, указанный процесс продолжается до завершения обработки всех объектов по желаемым сигналам, формируемым посредством блока задания желаемых значений.
Сопоставительный анализ признаков заявляемого способа с существенными признаками аналогов и прототипа свидетельствует о его соответствии критерию "новизна".
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак «… если очередные части обрабатываемого объекта или другие объекты находятся вне заранее сформированной неизменной рабочей зоны манипулятора, определенной в связанной системе координат, то посредством блока расчета с учетом очередных желаемых значений элементов первого, второго и третьего векторов и сохраненной в его памяти информации о рабочей зоне определяют направления и величины требуемых дополнительных линейных пространственных смещений всего манипулятора вместе с его связанной системой координат параллельно одной, двум или сразу трем осям абсолютной системы координат …» позволяет своевременно выявить необходимость, а также определить направление и величину требуемых дискретных смещений манипулятора.
Признак «… и дискретно обеспечивают эти смещения с помощью соответствующих механизмов, сохраняя параллельность осей двух указанных систем координат для попадания еще не обработанных частей протяженных объектов или новых объектов в рабочую зону многостепенного манипулятора, в которой возможно произвольное расположение его рабочего органа в соответствии с формируемыми посредством блока задания желаемых значений величинами элементов первого, второго и третьего векторов в абсолютной системе координат …» позволяет продолжить выполнение необходимых технологических операций, когда при предыдущем расположении манипулятора в АСК некоторые объекты или части протяженных объектов располагались вне его рабочей зоны, в которой рабочие органы могли выполнять желаемые движения, задаваемые тремя векторами.
Признак «… указанные смещения обеспечивают с помощью трех дополнительных линейных степеней подвижности, управляемых соответствующими тремя дополнительными следящими приводами …» указывает на то, что в состав предложенного способа предлагается вводить три дополнительных следящих привода, смещающих манипулятор и его рабочую зону вместе с ССК в АСК в нужном направлении.
Признак «… при этом после завершения очередных дополнительных линейных пространственных смещений многостепенного манипулятора вычисления всех его обобщенных координат, осуществляемые посредством блока расчета, продолжают выполнять в его связанной системе координат, в которой полностью сохраняют форму рабочей зоны манипулятора, одновременно учитывая все его уже выполненные дополнительные линейные пространственные смещения параллельно осям абсолютной системы координат без какой-либо коррекции текущих желаемых сигналов, сформированных посредством блока задания желаемых значений, ориентированных только на абсолютную систему координат …» указывает на то, что все расчеты желаемых движений манипулятора, определяемых девятью желаемыми значениями элементов трех векторов, задаваемых в АСК, продолжают выполняться по известным и неизменным аналитическим зависимостям в ССК, обеспечивая сохранность формы уже смещенной в АСК рабочей зоны рассматриваемого манипулятора.
Признак «… при этом обеспечивают два возможных варианта управления манипулятором во время его дополнительных линейных пространственных смещений вдоль осей абсолютной системы координат …» указывает на то, что в процессе смещений ССК вместе с манипулятором относительно АСК могут происходить два различных процесса его управления.
Признак «… первый используется тогда, когда происходит обработка протяженных объектов, не помещающихся целиком в рабочую зону манипулятора, в этом случае при достижении конечной точкой рабочего органа своего заданного крайнего положения в рабочей зоне манипулятора посредством блока расчета формируют сигнал, с учетом которого стабилизируют желаемые значения, формируемые с использованием блока задания желаемых значений, для сохранения положения и ориентации рабочего органа во время указанных линейных пространственных смещений манипулятора вдоль осей абсолютной системы координат …» указывает на то, что в процессе реализации первого варианта управления, когда протяженный объект не может быть сразу обработан при текущем расположении рабочей зоны манипулятора в АСК, обеспечивается фиксация рабочего органа в АСК в последней его позиции для продолжения требуемой обработки указанного объекта точно из этой позиции, когда рабочая зона манипулятора сместится вместе с ним и не произойдет поломки рабочего органа при возможных силовых контактах с объектом во время смещения манипулятора.
Признак «… при этом посредством блока расчета продолжают непрерывно решать обратную задачу кинематики манипулятора и полученные при указанном решении сигналы в связанной системе координат отрабатывают его соответствующими следящими приводами с учетом указанных текущих дополнительных линейных пространственных смещений манипулятора вместе с его рабочей зоной в абсолютной системе координат, изменяя конфигурацию соответствующих частей манипулятора по мере его смещений …» определяет, что при очередных линейных смещениях манипулятора в АСК его конфигурация непрерывно меняется за счет непрерывного изменения других степеней подвижности, тем самым обеспечивая фиксацию рабочего органа в пространстве.
Признак «… после завершения линейного пространственного смещения всего многостепенного манипулятора, при котором продолжают сохранять заданное положение и ориентацию его рабочего органа в абсолютной системе координат, посредством блока расчета формируют новый сигнал, и направляют его на соответствующий вход блока задания желаемых значений, при этом на его соответствующих девяти выходах после стабилизации продолжают формировать новые желаемые значения, которые продолжают обеспечивать желаемое перемещение конечной точки рабочего органа в связанной системе координат в процессе продолжения решения обратной задачи кинематики многостепенного манипулятора после завершения выполнения всех его дополнительных линейных пространственных смещений …» указывает на то, что, когда манипулятор сместится в АСК до своего нового крайнего положения, после которого уже не удается сохранить заданную ориентацию его рабочего органа, это смещение прекращается и опять продолжается режим обработки объекта до очередного смещения манипулятора в новую позицию в АСК.
Признак «… при втором варианте, когда после полного выполнения операций на текущем объекте рабочий орган вместе с многостепенным манипулятором по командам, формируемым посредством блока задания желаемых значений, перемещают к следующему удаленному объекту, расположенному вне рабочей зоны манипулятора, с использованием блока расчета опять подают сигнал, с учетом которого желаемые значения, формируемые посредством блока задания желаемых значений, стабилизируют до попадания очередного объекта в рабочую зону манипулятора с заданной ориентацией его рабочего органа …» определяет, что, если манипулятором обработка очередного длинномерного объекта полностью завершена, то начинают его новое линейное перемещение уже к отдельно стоящему объекту с заданной ориентацией рабочего органа.
Признак «… после отработки величин дополнительных линейных пространственных смещений многостепенного манипулятора вместе с его рабочей зоной, формируемых посредством блока расчета, когда ошибки всех следящих приводов этого манипулятора обнулятся, с использованием блока расчета формируют новый сигнал, с учетом которого желаемые значения, формируемые посредством блока задания желаемых значений, продолжают изменяться, обеспечивая требуемую обработку очередного объекта …» указывает на то, что после перемещения манипулятора к очередному объекту обработки в АСК начинается процесс этой обработки по программе, определяемой блоком задания желаемых значений.
Признак «… указанный процесс продолжается до завершения обработки всех объектов по желаемым сигналам, формируемым посредством блока задания желаемых значений» позволяет продолжать выполнение технологических операций до завершения обработки всех объектов.
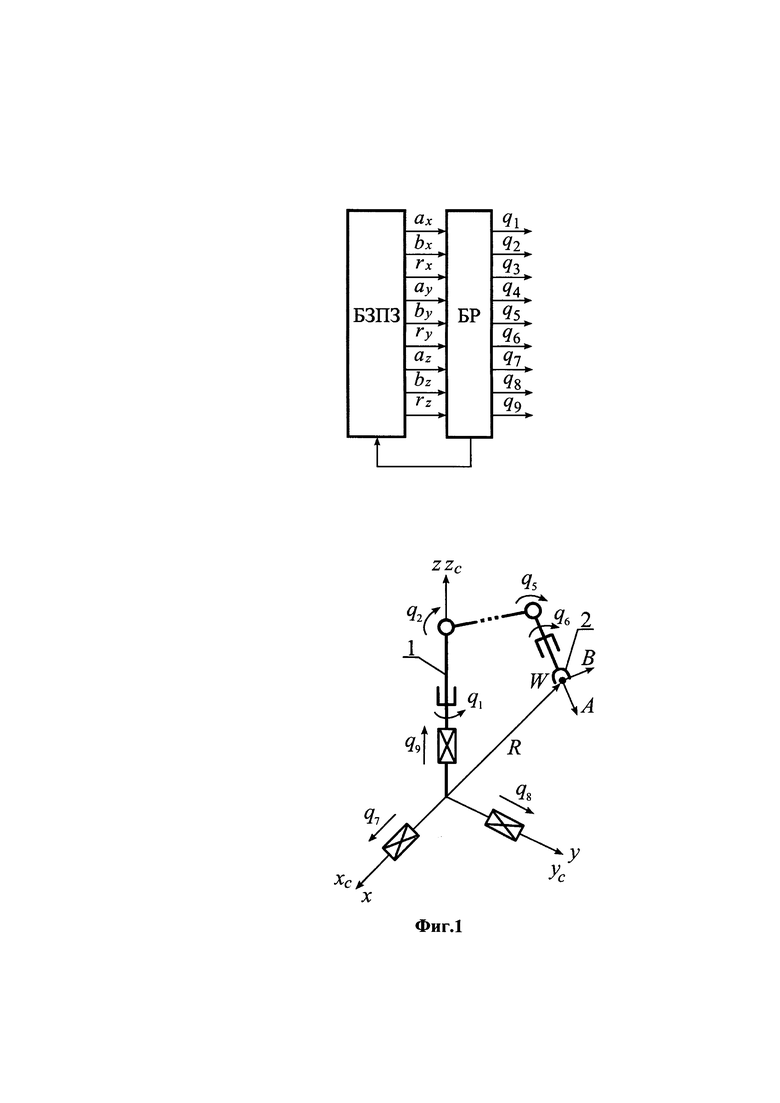
Заявляемое изобретение иллюстрируется чертежами, где на Фиг. 1 показана обобщенная схема реализации предлагаемого способа управления многостепенным манипулятором, когда перед началом работы все оси АСК xyz и ССК хcуczс совпадают. Здесь введены следующие обозначения: 1 - манипулятор, имеющий n степеней подвижности; 2 - рабочий орган манипулятора 1;  - обобщенная координата его i-й степени подвижности, отрабатываемая соответствующим следящим приводом; rх, rу и rz - координаты вектора R, задающего положение конечной точки W рабочего органа 2 в АСК; ах, aу, az, bx, by, bz, - соответствующие элементы взаимно перпендикулярных векторов А и В, точки начала которых совпадают с конечной точкой W рабочего органа 2, а направления задают его ориентацию в АСК;
- обобщенная координата его i-й степени подвижности, отрабатываемая соответствующим следящим приводом; rх, rу и rz - координаты вектора R, задающего положение конечной точки W рабочего органа 2 в АСК; ах, aу, az, bx, by, bz, - соответствующие элементы взаимно перпендикулярных векторов А и В, точки начала которых совпадают с конечной точкой W рабочего органа 2, а направления задают его ориентацию в АСК;  - обобщенные координаты линейных степеней подвижности, обеспечивающих дополнительные линейные пространственные смещения всего манипулятора 1 вместе с ССК и жестко связанной с ней его рабочей зоной (рабочим пространством) параллельно осям АСК; БЗЖЗ - блок задания желаемых значений элементов векторов R, А и В; БР - блок расчета, формирующий в реальном масштабе времени (РМВ) текущие желаемые значения
- обобщенные координаты линейных степеней подвижности, обеспечивающих дополнительные линейные пространственные смещения всего манипулятора 1 вместе с ССК и жестко связанной с ней его рабочей зоной (рабочим пространством) параллельно осям АСК; БЗЖЗ - блок задания желаемых значений элементов векторов R, А и В; БР - блок расчета, формирующий в реальном масштабе времени (РМВ) текущие желаемые значения  и
и  (n обобщенных координат обеспечивают перемещение рабочего органа 2 манипулятора 1 в его рабочей зоне в ССК). Заявленный способ реализуется следующим образом.
(n обобщенных координат обеспечивают перемещение рабочего органа 2 манипулятора 1 в его рабочей зоне в ССК). Заявленный способ реализуется следующим образом.
В начале его реализации некоторые объекты работ или их части находятся в рабочей зоне манипулятора 1, связанной с ССК, а информация о пространственных координатах мест обработки рабочим органом 2 манипулятора 1 указанных объектов в АСК сохранена в памяти БЗЖЗ. С использованием БЗЖЗ, принцип работы которого широко известен из уровня техники (Фу. К., Гонсалес Р., Ли К. Робототехника. М.: Мир, 1989. С.193-217) и реализуется, например, с использованием математического аппарата параметрических сплайнов (Патент РФ №2731741. Бюл. №25, 2020), в РМВ задают текущие желаемые значения девяти элементов векторов R, А и В, являющихся функциями времени и соответственно характеризующих текущие положения конечной точки W рабочего органа 2 манипулятора 1 и его ориентацию в АСК в конкретный момент времени. С помощью известных аналитических выражений (Крейг Д. Дж. Введение в робототехнику: механика и управление, М. - Ижевск.: Институт компьютерных исследований, 2013, С.155-160), позволяющих в РМВ решать ОЗК для конкретной конструкции манипулятора, посредством БР формируют текущие желаемые значения всех обобщенных координат  манипулятора 1, а обобщенные координаты дополнительных линейных степеней подвижности
манипулятора 1, а обобщенные координаты дополнительных линейных степеней подвижности  Эти координаты подают на входы следящих приводов соответствующих степеней подвижности, и рабочий орган 2, перемещаясь в рабочей зоне, в РМВ выполняет предписанные программой технологические операции. Одновременно посредством БР по известным соотношениям (Филаретов В.Ф., Алексеев Ю.К., Лебедев А.В. Системы управления подводными роботами. Издательский дом «Круглый год». - М.: 2001. С. 187-190) осуществляют решение прямой задачи кинематики манипулятора 1, которое в РМВ позволяет определять расположение (нахождение) обрабатываемых участков объектов работ в рабочей зоне манипулятора 1 (в ССК).
Эти координаты подают на входы следящих приводов соответствующих степеней подвижности, и рабочий орган 2, перемещаясь в рабочей зоне, в РМВ выполняет предписанные программой технологические операции. Одновременно посредством БР по известным соотношениям (Филаретов В.Ф., Алексеев Ю.К., Лебедев А.В. Системы управления подводными роботами. Издательский дом «Круглый год». - М.: 2001. С. 187-190) осуществляют решение прямой задачи кинематики манипулятора 1, которое в РМВ позволяет определять расположение (нахождение) обрабатываемых участков объектов работ в рабочей зоне манипулятора 1 (в ССК).
Если после очередного решения прямой задачи кинематики оказывается, что обрабатываемый участок объекта работ или новый объект начинают находиться за пределами рабочей зоны манипулятора 1 в ССК, то с использованием БР с учетом информации о текущем желаемом положении конечной точки рабочего органа 2 в ССК и о форме рабочей зоны манипулятора 1 по известным методам (Филаретов В.Ф., Губанков А.С., Горностаев И.В., Коноплин А.Ю. Разработка метода формирования программных сигналов управления манипуляторами, установленными на подводных аппаратах. Подводные исследования и робототехника. 2018. №1. С.30-37) определяют направление и величину его смещения вместе с ССК параллельно осям АСК. Это дополнительное смещение манипулятора 1 могут осуществлять с помощью установки манипулятора на подвижное основание, выполненное, например, в виде мобильной платформы на роликонесущих колесах (см. примеры таких робототехнических устройств KMR iiwa и KMR QUANTEC), или иначе. В этом случае соответствующие  становятся отличными от нуля и подаются на соответствующие следящие приводы, реализующие требуемое дополнительное смещение манипулятора 1 в пространстве (в АСК) для помещения следующего обрабатываемого участка объекта или нового объекта в рабочую зону манипулятора 1. В зависимости от сложившейся ситуации указанные ортогональные линейные смещения обеспечивают поочередно одним или сразу несколькими приводами дополнительных степеней подвижности манипулятора 1. При этом посредством БЗЖЗ в РМВ всегда формируют текущие желаемые значения элементов векторов R, А и В, определяющие в АСК места обработки конкретных объектов независимо от величины рабочей зоны манипулятора 1 и от его текущего расположения в пространстве. Описание рабочей зоны манипулятора 1 в перемещаемой вместе с ним ССК остается неизменным в этой ССК. В процессе дополнительных линейных смещений манипулятора 1 вместе с его рабочей зоной в АСК рабочий орган 2 может фиксироваться в пространстве, если обрабатываются крупногабаритные объекты, но конфигурация манипулятора 1 при этом изменяется с помощью непрерывного решения обратной задачи кинематики, или устанавливаться в требуемое стационарное положение в АСК и ССК в конце дополнительных линейных смещений на основе девяти постоянных выходных сигналов, рассчитываемых с использованием БЗЖЗ. Для указанной временной остановки изменения выходных сигналов БЗЖЗ с выхода БР на вход БЗЖЗ подают сигнал, содержащий информацию о том, что очередной обрабатываемый участок объекта работ или новый объект находится за пределами рабочей зоны манипулятора 1 в его ССК.
становятся отличными от нуля и подаются на соответствующие следящие приводы, реализующие требуемое дополнительное смещение манипулятора 1 в пространстве (в АСК) для помещения следующего обрабатываемого участка объекта или нового объекта в рабочую зону манипулятора 1. В зависимости от сложившейся ситуации указанные ортогональные линейные смещения обеспечивают поочередно одним или сразу несколькими приводами дополнительных степеней подвижности манипулятора 1. При этом посредством БЗЖЗ в РМВ всегда формируют текущие желаемые значения элементов векторов R, А и В, определяющие в АСК места обработки конкретных объектов независимо от величины рабочей зоны манипулятора 1 и от его текущего расположения в пространстве. Описание рабочей зоны манипулятора 1 в перемещаемой вместе с ним ССК остается неизменным в этой ССК. В процессе дополнительных линейных смещений манипулятора 1 вместе с его рабочей зоной в АСК рабочий орган 2 может фиксироваться в пространстве, если обрабатываются крупногабаритные объекты, но конфигурация манипулятора 1 при этом изменяется с помощью непрерывного решения обратной задачи кинематики, или устанавливаться в требуемое стационарное положение в АСК и ССК в конце дополнительных линейных смещений на основе девяти постоянных выходных сигналов, рассчитываемых с использованием БЗЖЗ. Для указанной временной остановки изменения выходных сигналов БЗЖЗ с выхода БР на вход БЗЖЗ подают сигнал, содержащий информацию о том, что очередной обрабатываемый участок объекта работ или новый объект находится за пределами рабочей зоны манипулятора 1 в его ССК.
Указанные БЗЖЗ и БР могут быть реализованы на базе ЭВМ с использованием стандартного программного обеспечения. Таким образом, техническая реализация заявляемого способа управления рабочим органом многостепенного манипулятора при выполнении произвольных технологических операций не вызывает затруднений, так как в нем используются только типовые устройства и технические элементы.
Изобретение относится к области робототехники и может быть использовано при создании контурных систем управления многостепенными манипуляторами, применяемыми для обработки протяженных объектов либо объектов, удаленных друг от друга. Способ управления обеспечивает автоматическое перемещение многостепенного манипулятора вместе с его связанной системой координат в трехмерном пространстве таким образом, чтобы рабочий инструмент, закрепленный в его рабочем органе, располагаясь в соответствии с задаваемыми в абсолютной системе координат программными значениями элементов трех векторов, всегда выполнял заданные технологические операции на отдельно расположенных удаленных друг от друга или протяженных объектах до завершения очередного цикла работ без дополнительной ручной переустановки манипулятора или объектов работ в трехмерном пространстве. Использование изобретения позволяет расширить технологические возможности манипулятора. 1 ил.
Способ управления многостепенным манипулятором при обработке объектов, включающий использование блока задания желаемых значений, в памяти которого хранится информация о пространственных координатах мест обработки объектов рабочим органом многостепенного манипулятора в абсолютной системе координат, оси которой в начальный момент работы манипулятора совпадают с осями связанной с ним системы координат, при этом посредством упомянутого блока формируют в реальном масштабе времени три текущие значения проекций первого вектора положения конечной точки рабочего органа манипулятора на оси абсолютной системы координат и шесть проекций на те же оси взаимно перпендикулярных второго и третьего векторов, точки начала которых совпадают с выбранной конечной точкой рабочего органа многостепенного манипулятора, а направления которых задают ориентацию рабочего органа в абсолютной системе координат в процессе выполнения им заданных технологических операций, причем посредством блока расчета на основе аналитических зависимостей решения обратной задачи кинематики для используемой конструкции многостепенного манипулятора формируют текущие желаемые значения всех его обобщенных координат, которые подают на входы соответствующих следящих приводов манипулятора, обеспечивающих заданные изменения обобщенных координат с заданным перемещением и пространственной ориентацией рабочего органа манипулятора в связанной с ним системе координат в соответствии с текущими желаемыми значениями элементов первого, второго и третьего векторов, отличающийся тем, что, если очередные части обрабатываемого объекта или другие объекты, подлежащие обработке, находятся вне заранее сформированной неизменной рабочей зоны манипулятора, определенной в связанной системе координат, то посредством блока расчета с учетом очередных желаемых значений элементов первого, второго и третьего векторов и сохраненной в его памяти информации о рабочей зоне определяют направления и величины требуемых дополнительных линейных пространственных смещений всего манипулятора вместе с его связанной системой координат параллельно одной, двум или трем осям абсолютной системы координат, а затем дискретно обеспечивают эти смещения с помощью трех дополнительных линейных степеней подвижности манипулятора, управляемых соответствующими тремя дополнительными следящими приводами, сохраняя параллельность осей двух указанных систем координат для попадания еще не обработанных частей объекта или других объектов, подлежащих обработке, в рабочую зону манипулятора, в которой возможно произвольное расположение его рабочего органа в соответствии с формируемыми посредством упомянутого блока задания желаемых значений величинами элементов первого, второго и третьего векторов в абсолютной системе координат, при этом после завершения очередных дополнительных линейных пространственных смещений манипулятора вычисления всех его обобщенных координат, осуществляемые посредством блока расчета, продолжают выполнять в его связанной системе координат, в которой полностью сохраняют форму рабочей зоны манипулятора, одновременно учитывая все его уже выполненные дополнительные линейные пространственные смещения параллельно осям абсолютной системы координат без коррекции текущих желаемых сигналов, сформированных посредством упомянутого блока задания желаемых значений, ориентированных только на абсолютную систему координат, причем при обработке протяженных объектов, не помещающихся целиком в рабочую зону манипулятора во время его дополнительных линейных пространственных смещений вдоль осей абсолютной системы координат, при достижении конечной точкой рабочего органа своего заданного крайнего положения в рабочей зоне манипулятора посредством блока расчета формируют сигнал, с учетом которого стабилизируют желаемые значения, формируемые с использованием блока задания желаемых значений, для сохранения положения и ориентации рабочего органа во время указанных линейных пространственных смещений манипулятора вдоль осей абсолютной системы координат, а посредством блока расчета продолжают непрерывно решать обратную задачу кинематики манипулятора и полученные при указанном решении сигналы в связанной системе координат отрабатывают его соответствующими следящими приводами с учетом указанных текущих дополнительных линейных пространственных смещений манипулятора вместе с его рабочей зоной в абсолютной системе координат, изменяя конфигурацию соответствующих частей манипулятора по мере его смещений, после завершения линейного пространственного смещения всего многостепенного манипулятора, при котором продолжают сохранять заданное положение и ориентацию его рабочего органа в абсолютной системе координат, посредством блока расчета формируют новый сигнал, и направляют его на соответствующий вход блока задания желаемых значений, при этом на его соответствующих девяти выходах после упомянутой стабилизации продолжают формировать новые желаемые значения, которые продолжают обеспечивать желаемое перемещение конечной точки рабочего органа в связанной системе координат в процессе продолжения решения обратной задачи кинематики манипулятора после завершения выполнения всех его дополнительных линейных пространственных смещений, а при обработке нескольких объектов после полного выполнения операций на текущем объекте рабочий орган вместе с манипулятором по командам, формируемым посредством блока задания желаемых значений, перемещают к следующему объекту, расположенному вне рабочей зоны манипулятора, с использованием блока расчета подают сигнал, с учетом которого стабилизируют желаемые значения, формируемые посредством блока задания желаемых значений, до попадания очередного объекта в рабочую зону манипулятора с заданной ориентацией его рабочего органа, при этом после отработки величин дополнительных линейных пространственных смещений манипулятора вместе с его рабочей зоной, формируемых посредством блока расчета, когда ошибки всех следящих приводов манипулятора обнулятся, с использованием блока расчета формируют новый сигнал, с учетом которого желаемые значения, формируемые посредством блока задания желаемых значений, продолжают изменяться, обеспечивая требуемую обработку очередного объекта, и указанный процесс продолжается до завершения обработки всех объектов по сигналам, формируемым посредством блока задания желаемых значений.
| US 6757587 B1, 29.06.2004 | |||
| СПОСОБ АВТОНОМНОГО ПРОГРАММИРОВАНИЯ МАНИПУЛЯТОРА С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 2011 |
|
RU2549161C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЦИЛИНДРИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2010 |
|
RU2437753C1 |
| Способ управления манипулятором | 2017 |
|
RU2692360C2 |
| Способ управления манипулятором | 2017 |
|
RU2685831C1 |
| US 2009306825 A1, 10.12.2009 | |||
| US 8428781 B2, 23.04.2013. | |||

