Изобретение относится к робототехнике, в частности к системам управления манипуляторами, расположенными на мобильных роботах (MP), и может быть использовано при выполнении различных работ с помощью мобильных роботов в автоматическом режиме в экстремальных условиях.
Известен способконтроля точности контурных перемещений промышленных роботов (Патент №2466858, кл. B25J 19/00, Бюл. №32, опубл. 20.11.2012), включающий закрепление на фланце манипулятора калибровочного инструмента с наконечником в виде сферы, координаты центра которой совмещают с координатами характеристической точки рабочего органа манипулятора, вносят в регистрирующую аппаратуру допустимые значения величины погрешности позиционирования манипулятора, подводят манипулятором сферу калибровочного инструмента в точку измерительного контроля, определяют и запоминают начальные координаты центра сферы калибровочного инструмента в этой точке, производят изменение ориентации калибровочного инструмента в пространстве на максимально возможные углы, обусловленные кинематической схемой манипулятора, определяют и регистрируют отклонения координат центра сферы калибровочного инструмента от начальных значений, сравнивают эти отклонения с допустимыми значениями погрешности позиционирования манипулятора, по которым судят о точности контурных перемещений манипулятора, определяют отклонение координат центра сферы калибровочного инструмента с помощью оптической измерительной системы, выполненной с возможностью цифровой обработки видеоинформации, при этом формируют изображение сферы калибровочного инструмента в приемнике изображения, создают в нем двухмерную шкалу в виде 4 виртуальных меток, жестко фиксируемых в начальный такт измерения на поверхности приемника изображения в 4 точках изображения сферы калибровочного инструмента, получаемых пересечением окружности изображения сферы и 2 перпендикулярных прямых, проходящих через центр изображения сферы и совпадающих с координатными осями присоединенной к сфере декартовой системы координат, запоминают их положение в системе координат видеокамеры, в последующие такты измеряют по изображению значения расстояний от виртуальных меток, спроецированных на оси присоединенной к изображению переместившейся сферы системы координат, до соответственно дальних изображений точек пересечения окружности изображения переместившейся сферы с соответствующими координатными осями присоединенной системы координат и значения отклонений контролируемой сферы  и
и  в направлениях соответствующих координатных осей определяют по формулам
в направлениях соответствующих координатных осей определяют по формулам

где d - известный диаметр сферы калибровочного инструмента; F1x, F2x, F1y, F2y - значения расстояний от проекций соответствующих виртуальных меток на координатные оси присоединенной к изображению перемещающейся сферы системы координат до изображений точек пересечения поверхности переместившейся сферы с соответствующими координатными осями присоединенной системы координат на противолежащих меткам поверхностях контролируемой сферы, причем измерительный контроль осуществляют в более чем одной точке, которые располагают в разных секторах рабочей зоны манипулятора, обусловленной его кинематической схемой.
Недостаток известного способа в том, что его нельзя использовать, когда информацию об объектах работ манипулятор получает не от системы технического зрения (СТЗ), которая одновременно может осуществлять контроль точности пространственных перемещений манипулятора и установлена на том же основании, что и манипулятор, а от СТЗ, установленной на другом MP, произвольно перемещающимся в пространства.
Известен также способ управления манипулятором (Патент №2685831, кл. B25J 9/00. Бюл. №12, опубл. 23.04.2019), закрепленным на основании мобильного робота с первой системой технического зрения и калибровочным инструментом с использованием второго мобильного робота со второй системой технического зрения, заключающийся в том, что координаты упомянутого калибровочного инструмента сравнивают с координатами характерной точки рабочего органа манипулятора после перемещения рабочего органа к калибровочному инструменту и с помощью первой системы технического зрения, оснащенной системой цифровой обработки видеоинформации, регистрируют отклонение калибровочного инструмента от характерной точки рабочего органа манипулятора в первой системе координат, жестко связанной с основанием первого мобильного робота, в которой работает манипулятор, вводят вторую систему технического зрения, оснащенную системой цифровой обработки видеоинформации, которую устанавливают на основании второго мобильного робота, способного произвольно перемещаться в пространстве отдельно от первого мобильного робота таким образом, чтобы его вторая система технического зрения могла видеть объект манипулирования, который не доступен для наблюдения первой системой технического зрения и доступен для манипулятора, и одновременно калибровочный инструмент, после определения с помощью второй системы технического зрения расположения объекта манипулирования, и калибровочного инструмента во второй системе координат, жестко связанной с основанием второго мобильного робота, с помощью его второй навигационной системы передают полученные и взаимосвязанные между собой в пространстве координаты объекта манипулирования, и калибровочного инструмента из второй связанной системы координат второго мобильного робота в абсолютную систему координат, а из нее с помощью первой навигационной системы первого мобильного робота - в его первую связанную систему координат, затем на основе информации о координатах пространственного расположения калибровочного инструмента в первой связанной системе координат, полученных первой навигационной системой, перемещают рабочий орган манипулятора в точку с этими координатами, после определения системой цифровой обработки видеоинформации первой системы технического зрения пространственного отклонения характерной точки рабочего органа манипулятора от калибровочного инструмента определяют погрешность передачи навигационной информации о расположении калибровочного инструмента из второй в первую связанную систему координат, которая совпадает с погрешностью передачи навигационной информации о расположении объекта манипулирования, при этом в первой связанной системе координат устраняют выявленную погрешность в расположении указанного объекта в первой связанной системе координат путем пересчета его координат в первой связанной системе координат с учетом выявленного пространственного отклонения характерной точки рабочего органа манипулятора от калибровочного инструмента.
Выше описанный способ является наиболее близким к заявляемому техническому решению и принят за прототип.
Однако прототип имеет недостатки, а именно, в использовании калибровочного инструмента и необходимости выполнения пробных движений рабочего органа манипулятора для выявления погрешности определения и перевода навигационной информации (координат) о расположении объекта манипулирования относительно СТЗ второго MP в систему координат (СК), связанную с первым MP. Это приводит к значительному снижению быстродействия работы манипулятора и усложняет конструкцию всего устройства в целом.
Кроме того, недостатком прототипа является невозможность учета текущей ориентации обоих мобильных роботов по углам крена, тангажа и рыскания в абсолютной СК, что не позволяет использовать этот способ при работе (перемещении) обоих мобильных роботов не по строго горизонтальным, а по произвольным неровным и неплоским поверхностям.
Задачей заявляемого технического решения является устранение недостатков прототипа, в частности, повышение скорости (быстродействия) выполнения всех предписанных манипуляционных операций при сохранении заданной точности их выполнения, а также обеспечение учета текущей произвольной пространственной ориентации оснований обоих MP в абсолютной СК.
Технический результат, получаемый при решении поставленной задачи, заключается в повышении скорости выполнения всех предписанных манипуляционных операций за счет исключения необходимости выполнения пробных движений рабочего органа манипулятора, а также в упрощении конструкции MP за счет исключении калибровочного инструмента. Кроме того, сохраняется заданная точность автоматической работы манипулятора при полном учете (с использованием гироскопов) текущего положения и пространственной ориентации оснований обоих MP в абсолютной СК. Это позволяет использовать MP для работы в условиях сильно пересеченной местности.
Поставленная задача решается тем, что в заявляемом способе управления манипулятором, закрепленном на основании первого мобильного робота, оснащенном рабочим органом и используемом для своего автоматического управления информацию, получаемую от первой системы технического зрения, установленной на основании первого мобильного робота, в первой системе координат, жестко связанной с основанием первого мобильного робота, и от второй системы технического зрения, установленной на основании второго мобильного робота и используемой для одновременного наблюдения во второй системе координат, жестко связанной с основанием второго мобильного робота, за перемещением рабочего органа и объектом, который не виден первой системой технического зрения, но с которым манипулятор должен выполнять технологические операции, на основании первого мобильного робота устанавливают первую навигационную систему, а на основании второго мобильного робота - вторую навигационную систему, которые оснащены гироскопами, измеряющими ориентации оснований, соответственно, первого и второго мобильных роботов в абсолютной системе координат, определенные второй системой технического зрения координаты объекта и рабочего органа во второй системе координат передают из этой системы координат с помощью второй навигационной системы в абсолютную систему координат, а из нее с учетом информации, получаемой от первой навигационной системы - в первую систему координат, на основе сравнения переданных из второй системы координат в первую систему координат текущих координат рабочего органа манипулятора с координатами его реального расположения в первой системе координат, определяемыми текущей конфигурацией манипулятора по текущим углам относительных поворотов его звеньев, измеренным встроенными в степени подвижности манипулятора датчиками положения, определяют текущую погрешность передачи навигационной информации о расположении этого рабочего органа и объекта работ из второй в первую систему координат, эту погрешность в расположении объекта работ в первой системе координат устраняют путем пересчета координат этого объекта работ с учетом выявленного отклонения координат реального расположения рабочего органа манипулятора от его координат, определенных с помощью второй системы технического зрения и переданных из второй в первую систему координат.
Сопоставительный анализ существенных признаков заявляемого способа с существенными признаками аналогов и прототипа свидетельствует о его соответствии критерию "новизна".
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак «…на основании первого мобильного робота устанавливают первую навигационную систему, а на основании второго мобильного робота - вторую навигационную систему, которые оснащены гироскопами, измеряющими ориентации, соответственно, первого и второго мобильных роботов в абсолютной системе координат, определенные второй системой технического зрения координаты объекта и рабочего органа во второй системе координат передают из этой системы координат с помощью второй навигационной системы в абсолютную систему координат, а из нее с учетом информации, получаемой от первой навигационной системы - в первую систему координат…»за счет использования двух гироскопов в процессе передачи координат рабочего органа и объекта из второй в первую систему координат обеспечивает полный учет как текущего положения, так и пространственной ориентации оснований обоих MP по углам крена, тангажа и рыскания в абсолютной СК, что позволяет расширить область использования MP для их точной работы в условиях сильно пересеченной (неровной) местности.
Признак «…на основе сравнения переданных из второй системы координат в первую систему координат текущих координат рабочего органа манипулятора с координатами его реального расположения в первой системе координат, определяемыми текущей конфигурацией манипулятора по текущим углам относительных поворотов его звеньев, измеренным встроенными в степени подвижности манипулятора датчиками положения, определяют текущую погрешность передачи навигационной информации о расположении этого рабочего органа и объекта работ из второй в первую систему координат…», обеспечивает быстрое определение погрешности передачи навигационной информации о текущем расположении рабочего органа манипулятора и объекта, что повышает скорость выполнения всех предписанных манипуляционных операций с объектом работ, а также обеспечивает упрощение конструкции мобильного робота за счет исключении специального калибровочного инструмента.
Признак «…, эту погрешность в расположении объекта работ в первой системе координат устраняют путем пересчета координат этого объекта работ с учетом выявленного отклонения координат реального расположения рабочего органа манипулятора от его координат, определенных с помощью второй системы технического зрения и переданных из второй в первую систему координат», обеспечивает точное определение пространственного расположения объекта работ в первой системе координат для последующего точного выполнения всех требуемых технологических операций с помощью манипулятора.
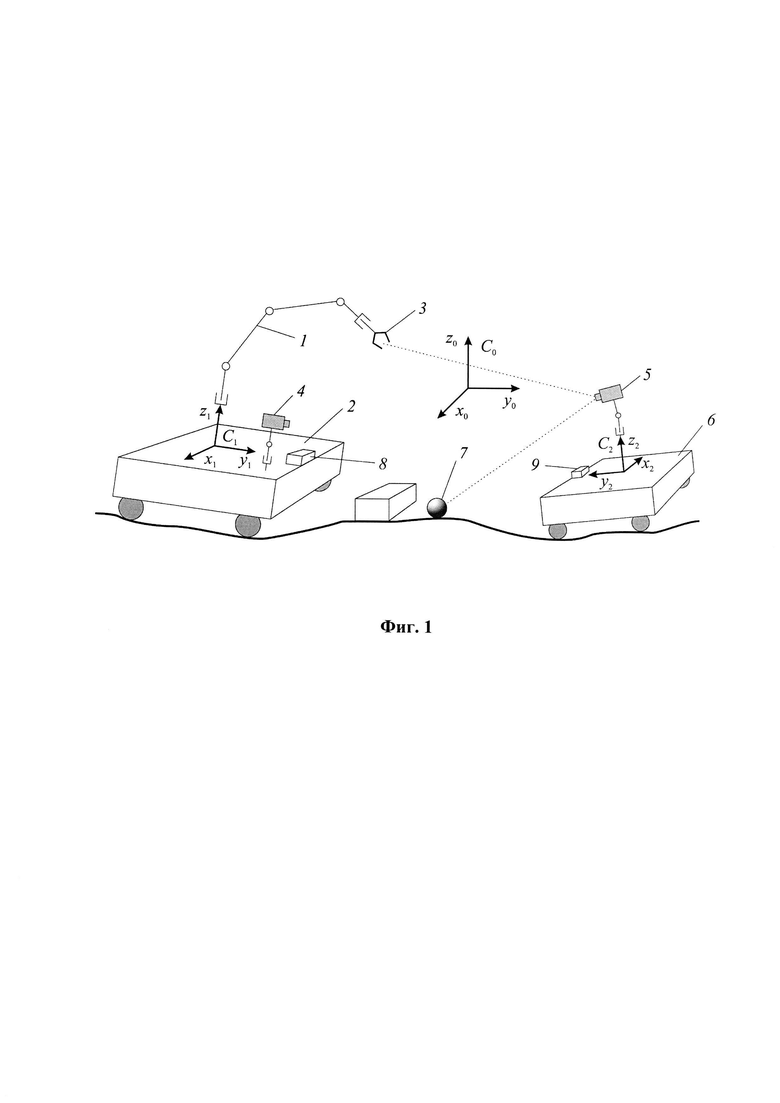
Сущность заявляемого технического решения поясняется чертежом, где на Фиг. 1 показана схема, реализации заявляемого способа автоматического управления манипулятором, расположенным на одном MP, когда информация об объекте работ поступает от СТЗ, расположенной на другом MP.
На схеме введены следующие обозначения: 1 - манипулятор; 2 - первый MP; 3 - рабочий орган манипулятора; 4 - первая СТЗ; 5 - вторая СТЗ; 6 -второй MP; 7 - объект работ; 8 - первая навигационная система с гироскопами; 9- вторая навигационная система с гироскопами; С0 -абсолютная система координат (АСК); С1 - первая СК, жестко связанная с основанием первого MP; С2 - вторая СК, жестко связанная с основанием второго MP.
Заявляемый способ реализуется следующим образом.
В процессе работы первый MP 2, оснащенного манипулятором 1 с рабочим органом 3 и первой СТЗ 4, в экстремальных условиях с недетерминированной окружающей средой могут возникать ситуации, когда эта СТЗ 4 не позволяет наблюдать объект 7 работ во время автоматического выполнения манипуляционных операций. В этом случае для наблюдения за объектом 7 работ используют более маневренный второй MP 6, оснащаемый второй СТЗ 5. MP 6 подходит к объекту 7 с удобного ракурса так, чтобы одновременно был виден этот объект и рабочий орган 3 (его характерная точка) манипулятора 1. С помощью СТЗ 5 определяют координаты объекта 7 и рабочего органа 3 в СК С2. Затем эти координаты с помощью второй навигационной системы 9 второго MP 6 из СК С2 переводятся в АСК, а из нее с помощью первой навигационной системы 8 первого MP 2 в СК С1.
Однако первая 8 и вторая 9 навигационные системы всегда работают с существенными погрешностями. Поэтому формируемые с их помощью АСК в первой С1 и второй С2 СК не совпадают с выбранной реальной АСК, и перевод координат рабочего органа 3 и объекта 7 работ из СК С2 в СК С1 через АСК, сформированные в С2 и С1, всегда будет осуществляться с погрешностями, примерно одинаковыми для рабочего органа 3 и объекта 7. В результате без предварительного уточнения этих координат осуществлять точное автоматическое выполнение технологических операций с объектом 7, ориентируясь только на исходную информацию, полученную с помощью СТЗ 5 и переданную в СК С1, манипулятор 1 не сможет. Для качественного выполнения отмеченных операций указанные координаты объекта 7 в СК C1 должны быть уточнены.
Для уточнения координат объекта 7 работ в СК С1 сравнивают координаты рабочего органа 3, определенные СТЗ 5 и переданные из СК С2 в СК С1, с точными координатами его реального расположения в СК С1 определяемыми текущей конфигурацией манипулятора (текущими углами поворотов звеньев манипулятора, измеренными встроенными в степени подвижности манипулятора датчиками положения). Это позволяет определить пространственную погрешность (ошибку) передачи навигационной информации о расположении рабочего органа 3 из СК С2 в СК С1. Указанную погрешность (ошибку) затем используют для корректировки и уточнения переданных ранее координат объекта 7 в СК С1.
Описанные выше операции передачи координат объекта 7 и рабочего органа 3 из СК С2 в СК С1 осуществляют одновременно при неподвижном положении оснований первого 2 и второго 6 MP. Поскольку гироскопы навигационных систем 8 и 9 обоих MP точно определяют отклонения по углам крена, тангажа и рыскания в абсолютной СК, то ошибки передачи координат рабочего органа 3 будут такими же, как и ошибки передачи координат объекта 7. Поэтому координаты объекта 7 после проведения указанной корректировки будут определяться точно. В результате манипулятор 1 будет обеспечивать точное выполнение заданных технологических операций с объектом 7, который не находится в поле зрения его СТЗ 2.
Техническая реализация заявляемого способа управления манипулятором не вызывает принципиальных затруднений, так как в нем используются только типовые алгоритмы, а также типовые технические элементы и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2021 |
|
RU2761924C1 |
| Способ управления манипулятором | 2017 |
|
RU2685831C1 |
| Способ точного управления подводным манипулятором с помощью откалиброванной бинокулярной системы технического зрения | 2023 |
|
RU2804597C1 |
| СПОСОБ ВНЕШНЕЙ КАЛИБРОВКИ БИНОКУЛЯРНОЙ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2022 |
|
RU2785952C1 |
| Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором | 2023 |
|
RU2799176C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОСТЕПЕННЫМ МАНИПУЛЯТОРОМ | 2021 |
|
RU2785144C1 |
| СПОСОБ ПОЗИЦИОННО-СИЛОВОГО УПРАВЛЕНИЯ АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ С МНОГОСТЕПЕННЫМ МАНИПУЛЯТОРОМ | 2023 |
|
RU2827123C2 |
| Способ управления многозвенным манипулятором необитаемого подводного аппарата для выполнения манипуляционных операций с подводными объектами | 2022 |
|
RU2781926C1 |
| Способ адаптивного управления манипулятором подводного аппарата | 2023 |
|
RU2826888C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
Способ управления манипулятором относится к робототехнике, в частности к системам управления манипуляторами, расположенными на мобильных роботах (MP), и может быть использован при выполнении различных работ с помощью мобильных роботов в автоматическом режиме в экстремальных условиях. Данным способом повышают скорость быстродействия выполнения всех предписанных манипуляционных операций при сохранении заданной точности их выполнения, а также обеспечение учета текущей произвольной пространственной ориентации оснований обоих MP в абсолютной системе координат. Кроме того, сохраняется заданная точность автоматической работы манипулятора при полном учете с использованием гироскопов текущего положения и пространственной ориентации оснований обоих MP в абсолютной системе координат. Это позволяет использовать MP для работы в условиях сильно пересеченной местности. Технический результат заключается в повышении скорости выполнения всех предписанных манипуляционных операций за счет исключения необходимости выполнения пробных движений рабочего органа манипулятора, а также в упрощении конструкции MP за счет исключения калибровочного инструмента. 1 ил.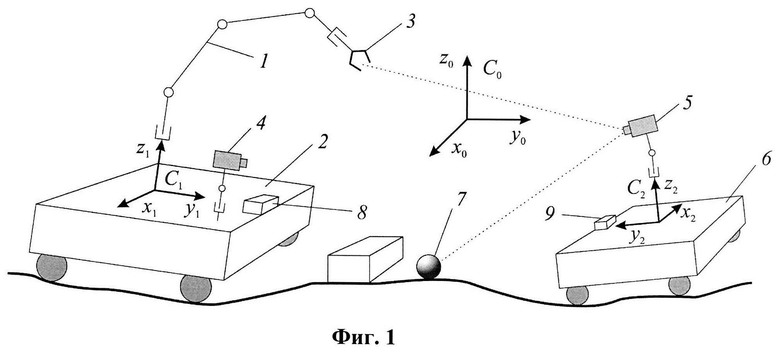
Способ управления манипулятором, который закреплен на основании первого мобильного робота, оснащен рабочим органом и использует для своего автоматического управления информацию, получаемую от первой системы технического зрения, установленной на основании первого мобильного робота, в первой системе координат, жестко связанной с основанием первого мобильного робота, и от второй системы технического зрения, установленной на основании второго мобильного робота и используемой для одновременного наблюдения во второй системе координат, жестко связанной с основанием второго мобильного робота, за перемещением рабочего органа и объектом, который не виден первой системой технического зрения, но с которым манипулятор должен выполнять технологические операции, отличающийся тем, что на основании первого мобильного робота устанавливают первую навигационную систему, а на основании второго мобильного робота - вторую навигационную систему, которые оснащены гироскопами, измеряющими ориентации оснований, соответственно, первого и второго мобильных роботов в абсолютной системе координат, определенные второй системой технического зрения координаты объекта и рабочего органа во второй системе координат передают из этой системы координат с помощью второй навигационной системы в абсолютную систему координат, а из нее с учетом информации, получаемой от первой навигационной системы - в первую систему координат, на основе сравнения переданных из второй системы координат в первую систему координат текущих координат рабочего органа манипулятора с координатами его реального расположения в первой системе координат, определяемыми текущей конфигурацией манипулятора по текущим углам относительных поворотов его звеньев, измеренным встроенными в степени подвижности манипулятора датчиками положения, определяют текущую погрешность передачи навигационной информации о расположении этого рабочего органа и объекта работ из второй в первую систему координат, эту погрешность в расположении объекта работ в первой системе координат устраняют путем пересчета координат этого объекта работ с учетом выявленного отклонения координат реального расположения рабочего органа манипулятора от его координат, определенных с помощью второй системы технического зрения и переданных из второй в первую систему координат.
| Способ управления манипулятором | 2017 |
|
RU2685831C1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| 0 |
|
SU178222A1 | |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ В ЛИНИЯХ ПЕРЕДАЧИ ВЫСОКОГО НАПРЯЖЕНИЯ | 0 |
|
SU176009A1 |
| CN 102419178 A, 18.04.2012 | |||
| WO 2018195999 A1, 01.11.2018 | |||
| EP 2936052 A4, 27.07.2016. | |||

