Изобретение относится к устройствам контроля технического состояния магистральных нефтепроводов, нефтепродуктопроводов неразрушающими методами путем пропуска внутри обследуемого трубопровода внутритрубного ультразвукового дефектоскопа.
Известно устройство для измерения и неразрушающего контроля материала трубопровода, содержащее цилиндрический носитель датчиков, расположенных по его окружной периферии. Носитель выполнен из эластичного материала в виде ряда соединенных между собой подпружиненных в радиальном направлении держателей. Внешний диаметр носителя несколько превышает внутренний диаметр трубопровода. Каждый держатель снабжен продольной выемкой с установленными в ней датчиками, образующей совместно с внутренней стенкой трубопровода при установке в него устройства канал, открытый со стороны хвостовой части носителя. В устройство также входит герметичный корпус, шарнирно соединенный с носителем и несущий соединенные с датчиками средства для обработки информации, а также блок питания (заявка DE 3626646 А1, опубликованная 18.02.1988).
Недостатком аналога является то, что в процессе работы устройства на датчиках появляется осадок, из-за чего достоверность измерений значительно ухудшается и пропускается большое количество имеющихся на стенке трубопровода дефектов, что не позволяет обнаружить большое количество имеющихся на стенке трубопровода дефектов.
Наиболее близким аналогом заявленного изобретения является носитель датчиков внутритрубного ультразвукового дефектоскопа, имеющий цилиндрическую форму и выполненный из эластичного материала. Внешний диаметр носителя датчиков несколько превышает внутренний диаметр трубопровода и представляет собой ряд соединенных между собой, расположенных по его окружной периферии, подпружиненных в радиальном направлении держателей, каждый из которых снабжен продольной выемкой с установленными в ней несколькими датчиками. Держатели закреплены на корпусе с помощью шарнирных соединений. Передняя стенка выемки каждого держателя имеет в поперечном сечении L-образную форму, а боковые стенки выемки снабжены по периферии пластинами из эластичного материала, несколько выступающими за кромки боковых стенок, при этом толщина боковых стенок превышает толщину передней стенки и пластин выемки (см. патент RU 2139469 С1, опубликованный 10.10.1999).
К достоинствам такого носителя относится то, что установленные под углом к оси носителя ряды датчиков позволяют сканировать всю поверхность трубопровода с перекрытием зон, контролируемых отдельными датчиками.
Особенностью ультразвуковых датчиков является повышенная чувствительность к точности их пространственного положения относительно диагностируемой поверхности.
Основным недостатком известного носителя является то, что при прохождении участка трубопровода с геометрическим дефектом типа вмятины держатели датчиков ведут себя как жесткие элементы, и наезд передней части держателя на вмятину (выступ на внутренней поверхности трубопровода) сопровождается отходом всего держателя от недеформированной части трубопровода. В результате датчики отклоняются как в угловом, так и линейном направлениях от своего оптимального положения относительно внутренней поверхности трубы и как следствие этого снижается эффективность диагностики и такие участки трубопровода с геометрическими дефектами остаются непроконтролированными.
Технической проблемой, на решение которой направлено заявленное изобретение, является создание носителя датчиков, обеспечивающего возможность идентификации дефектов сплошности материала, находящихся на вмятинах, что позволяет планировать ремонт данных участков в первую очередь для повышения надежности и безаварийной транспортировки нефти и нефтепродуктов.
Технический результат, достигаемый при реализации изобретения, заключается в повышении качества диагностики трубопровода в местах с особенностями геометрии трубопровода за счет обеспечения соблюдения необходимого отступа и углового положения ультразвуковых датчиков относительно поверхности дефектов трубы типа вмятина с возможностью определения дефекта сплошности материала трубы совмещенного с дефектом типа вмятина.
Технический результат достигается тем, что носитель датчиков внутритрубного ультразвукового дефектоскопа содержит соединенные посредством карданных шарниров секции, каждая из которых состоит из корпуса, на котором установлены центрирующие манжеты и измерительная система. Измерительная система включает ультразвуковые датчики, размещенные на подпружиненных в радиальном направлении держателях, расположенных по окружной периферии и в свободном состоянии раскрытых на диаметр несколько больший, чем внешний диаметр центрирующих манжет. Держатели выполнены в виде параллелограмных механизмов, каждый из которых содержит платформу с установленными на ней ультразвуковыми датчиками и роликовыми опорами, обеспечивающими заданное расстояние от ультразвуковых датчиков до внутренней поверхности трубопровода. Платформа установлена с возможностью сохранения своего углового положения относительно продольной оси носителя датчиков при складывании параллелограмного механизма, при этом держатели снабжены датчиками угловых перемещений.
Расположение ультразвуковых датчиков на платформах с роликовыми опорами, способными самоустанавливаться на обследуемую поверхность для обеспечения необходимого отступа и углового положения ультразвуковых датчиков относительно внутренней поверхности трубопровода, а также снабжение держателя датчиком угловых перемещений, данные от которого совместно с данными от ультразвуковых датчиков, позволяют определить, находятся ли дефекты на дефектах геометрии трубы и тем самым повысить качество диагностики трубопровода в местах с особенностями геометрии трубопровода.
Сведения, подтверждающие осуществление изобретения.
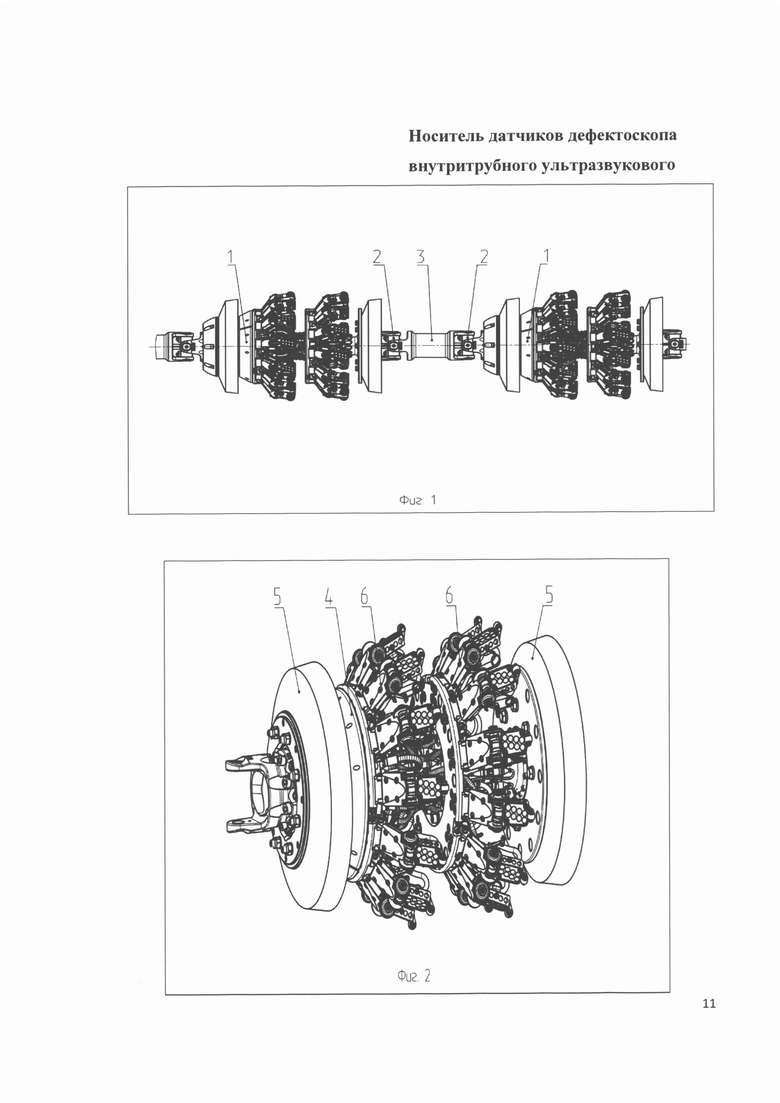
На фиг. 1 изображен носитель датчиков ультразвукового дефектоскопа, состоящий из двух секций носителя датчиков;
На фиг. 2 изображен общий вид секции носителя датчиков;
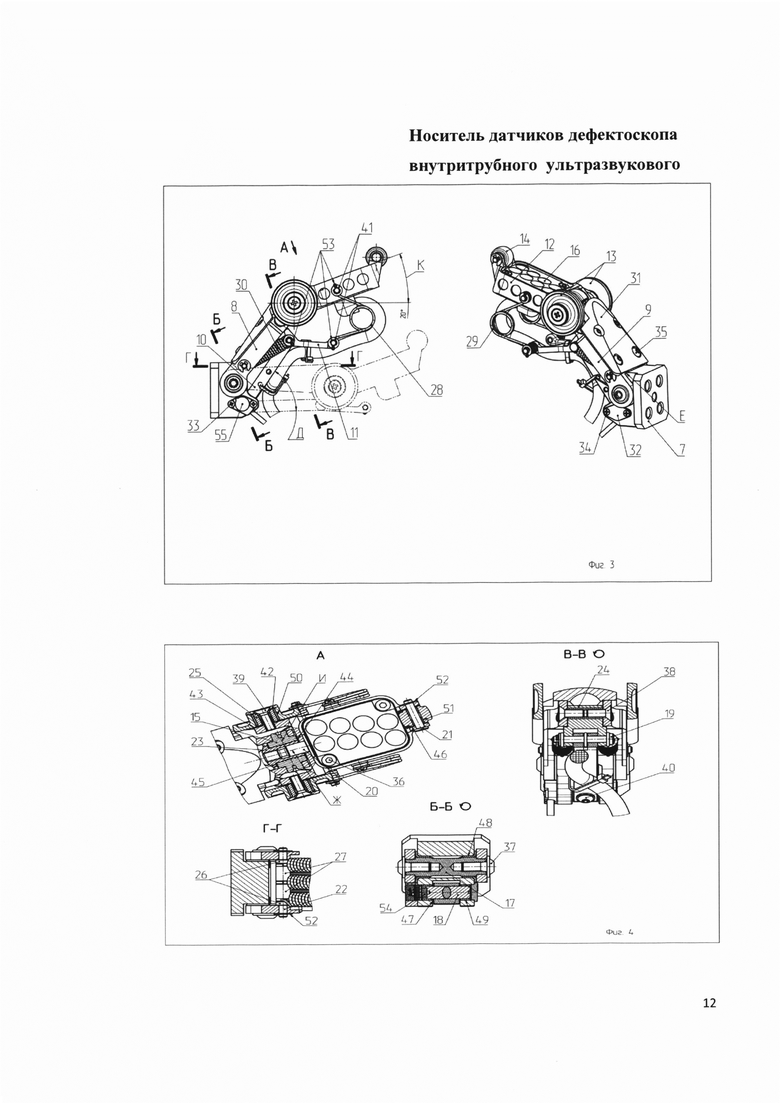
На фиг. 3 изображен держатель измерительной системы;
На фиг. 4 изображен местный вид А и разрезы Б-Б, В-В и Г-Г держателя измерительной системы.
На фиг. 1-4 приведены следующие обозначения:
1 - секция носителя датчиков;
2 - карданный шарнир;
3 - промежуточная вилка;
4 - корпус секции носителя датчиков;
5 - центрирующая манжета;
6 - держатель измерительной системы;
7 - корпус держателя измерительной системы;
8, 9 - рычаги;
10 - тяга;
11 - кронштейн;
12 - платформа;
13, 14 - роликовые опоры;
15 - крестовина;
16 - блок датчиков;
17, 18, 19, 20, 21, 22 - оси;
23, 24 - втулки с резьбой;
25 - втулка с квадратным отверстием;
26, 27 - втулки;
28, 29, 30 - пружины;
31 - бампер;
32 - крышка;
33, 34, 35, 36, 37, 38, 39, 40 - винты;
41, 42, 43, 44, 45, 46, 47 - шайбы;
48, 49, 50, 51 - втулки скольжения;
52 - упорная быстросъемная шайба;
53 - шплинт;
54 - магнит;
55 - датчик угловых перемещений.
Заявленный носитель датчиков состоит по крайней мере из одной секции носителя датчиков 1 (фиг. 1). Между собой секции носителя датчиков соединены посредством двух карданных шарниров 2 (фиг. 1) и промежуточной вилки 3 (фиг. 1).
Секция носителя датчиков 1 (фиг. 1) включает в себя корпус 4 (фиг. 2), состоящий из корпусных деталей, фланцев, вилок карданных соединений, деталей крепления кабелей и может содержать герметичную оболочку с электронными компонентами. На корпусе размещены полиуретановые манжеты 5 (фиг. 2), обеспечивающие центрирование секции носителя датчиков в трубопроводе и измерительная система, состоящая из держателей 6 (фиг. 2), расположенных по окружной периферии и в свободном состоянии раскрытых на диаметр несколько больший чем внутренний диаметр трубопровода.
Держатель измерительной системы 6 (фиг. 2) состоит из корпуса 7 (фиг. 3), рычагов 8, 9 (фиг. 3), тяги 10 (фиг. 3), кронштейна 11 (фиг. 3), платформы 12 (фиг. 3), роликовые опоры в виде трех роликов 13, 14 (фиг. 3), крестовины 15 (фиг. 4), блока датчиков 16 (фиг. 3), осей 17, 18, 19, 20, 21, 22 (фиг. 4), втулок с резьбой 23, 24 (фиг. 4), втулок с квадратным отверстием 25 (фиг. 4), втулок 26, 27 (фиг. 4), пружин 28, 29, 30 (фиг. 3), бампера 31 (фиг. 3), крышки 32 (фиг. 3), винтов 33, 34, 35 (фиг. 3), винтов 36, 37, 38, 39, 40 (фиг. 4), шайб 41 (фиг. 3), шайб 42, 43, 44, 45, 46, 47, (фиг. 4), втулок скольжения 48, 49, 50, 51, (фиг. 4), упорных быстросъемных шайб 52 (фиг. 4), шплинтов 53 (фиг. 3), магнита 54 (фиг. 4) и датчика угловых перемещений 55 (фиг. 3).
Корпус 7 (фиг. 3) с предварительно запрессованными в него втулками скольжения 48, 49 (фиг. 4), рычаги 8, 9 (фиг. 3), тяга 10 (фиг. 3), кронштейн 11 (фиг. 3), платформа 12 (фиг. 3), оси 17, 18 (фиг. 4) и втулка с резьбой 24 (фиг. 4), закрепленные винтами 37, 38, 40 (фиг. 4), образуют параллелограмный механизм способный перемещаться в пределах угла Д (фиг. 3). Кронштейн 11 (фиг. 3) и платформа 12 (фиг. 3) при складывании параллелограмного механизма в пределах угла Д (фиг. 3) сохраняют свое угловое положение относительно продольной оси носителя датчиков 1 (фиг. 1). Исходное положение параллелограмного механизма обеспечивают пружины 30 (фиг. 3), закрепленные на осях 19, 22 (фиг. 4) и опорные поверхности Е (фиг. 3) на корпусе 7 (фиг. 3) и рычагах 8, 9 (фиг. 3). Платформа 12 (фиг. 3) к рычагам 8, 9 (фиг. 3) закреплена посредством оси 20 (фиг. 4), крестовины 15 (фиг. 4) и втулки с резьбой 23 (фиг. 4), что дает возможность платформе поворачиваться на угол до 17° по часовой или против часовой стрелки относительно оси Ж (фиг. 4) и на угол до 45° относительно оси И (фиг. 4) на уменьшение угла К (фиг. 3). Пружины 28, 29 (фиг. 3), закрепленные к платформе 12 (фиг. 3) и кронштейну 11 (фиг. 3), имеют значительно меньшую жесткость чем пружины 30 (фиг. 3), обеспечивают платформе 12 (фиг. 3) в сводном состоянии заданный угол К и симметричное расположение относительно продольной оси носителя датчиков 1 (фиг. 1). Ультразвуковые датчики, объединенные для увеличения плотности расположения в блок 16 (фиг. 3), устанавливаются на платформу 12 (фиг. 3). Датчики расположены на определенном расстоянии от теоретической поверхности трубопровода и направлены по нормали к этой поверхности. От блока датчиков 16 (фиг. 3) отходит кабель с разъемом на конце для подключения к герметичной оболочке со средствами обработки и хранения данных измерений. Ролики 13, 14 (фиг. 3) с запрессованными в них втулками скольжения 50, 51 (фиг. 4) обеспечивают заданное расстояние от блока датчиков 16 (фиг. 3) до внутренней поверхности трубопровода и уменьшают трение при перемещении по трубопроводу за счет своего качения. Ролики 13 (фиг. 3) с запрессованными втулками скольжения 50 (фиг. 4) устанавливаются на квадратные выступы платформы 12 (фиг. 3) через втулки с квадратным отверстием 25 (фиг. 4) и крепятся при помощи шайб 42 (фиг. 4), имеющих квадратные выступы и винтов 39 (фиг. 4). Ролик 14 (фиг. 3) с запрессованными втулками скольжения 51 (фиг. 4) крепится к платформе 12 (фиг. 3) посредством оси 21 (фиг. 4) и упорной быстросъемной шайбы 52 (фиг. 4). Шайбы 43, 44, 45, 46, 47 (фиг. 4) предназначены для снижения трения при работе механизма и улучшения ремонтопригодности. Бампер 31 (фиг. 3) крепится винтами 35 (фиг. 3) и предназначен для защиты механизма от повреждения. Датчик угловых перемещений закреплен на корпусе 7 (фиг. 3) винтами 33 (фиг. 3) и имеет кабель с разъемом на конце для передачи данных в герметичную колбу со средствами обработки и хранения данных. Работает датчик угловых перемещений 55 (фиг. 3) совместно с магнитом 54 (фиг. 4), вклеенным внутрь оси 18 (фиг. 4), которая вращается с тягой 10 (фиг. 3) за счет поджатая винтом 40 (фиг. 4). Данные от датчика угловых перемещений 55 (фиг. 3) совместно с данными от ультразвуковых датчиков дают возможность определить, находятся ли дефекты на дефектах геометрии трубы.
Усилие прижатия, передаваемое через параллелограмный механизм на передние ролики, относительно малая жесткость пружин 28, 29 (фиг. 3) и возможность платформы 12 (фиг. 3) поворачиваться на определенные углы вокруг осей Ж и И дает возможность платформе самоустанавливаться тремя роликами на поверхность трубопровода, включая вмятины, тем самым обеспечивается выдерживание определенного расстояния и углового положения ультразвуковых датчиков к внутренней поверхности трубопровода.
Устройство работает следующим образом.
Носитель датчиков в составе внутритрубного ультразвукового дефектоскопа, помещенного в трубопровод, движется вместе с транспортируемой средой. При этом манжеты 5 (фиг. 2) центрируют носитель датчиков 1 (фиг. 1), а держатели измерительной системы 6 (фиг. 2), в свободном состоянии раскрытые на диаметр, больший внутреннего диаметра трубопровода, преодолевая усилия пружин 30 (фиг. 3), складываются в пределах угла Д (фиг. 3), прижимая платформу 12 через роликовые опоры 13 и 14 к внутренней поверхности трубопровода. Платформа 12 (фиг. 3), в свободном состоянии находящаяся, благодаря пружинам 28, 29 (фиг. 3), под углом К (фиг. 3) симметрично продольной оси носителя датчиков 1 (фиг. 1), имеет возможность, преодолевая относительно небольшое усилие пружин 28, 29 (фиг. 3), поворачиваться на определенные углы вокруг осей Ж и И (фиг. 4), что обеспечивает прижатие платформы 12 (фиг. 3) через ролики 13, 14 (фиг. 3) к внутренней поверхности трубопровода, включая места с дефектами геометрии типа вмятина. Блок датчиков 16 (фиг. 3), закрепленный на платформе 12 (фиг. 3), излучает ультразвуковые импульсы и регистрирует отраженные, после чего через кабель передает данные для обработки и хранения в герметичную колбу на носителе датчиков 1 (фиг. 1) или расположенную в составе другой секции дефектоскопа внутритрубного ультразвукового. В процессе движения внутритрубного ультразвукового дефектоскопа внутри трубопровода держатели измерительной системы 6 (фиг. 2), в зависимости от толщины стенки трубопровода, прохождения отводов, сужений или наезда на дефект геометрии трубы, меняют угол раскрытия Д (фиг. 3), при этом тяга 10 (фиг. 3) поворачивается вместе с держателем и через винт 40 (фиг. 4) поворачивает ось 18 (фиг. 4) с вклеенным магнитом 54 (фиг. 4). Изменение положения магнита 54 (фиг. 4) регистрируется датчиком угловых перемещений и передается для обработки и хранения в герметичную колбу на носителе датчиков 1 (фиг. 1) или расположенную в составе другой секции дефектоскопа внутритрубного ультразвукового.
| название | год | авторы | номер документа |
|---|---|---|---|
| Носитель датчиков внутритрубного ультразвукового дефектоскопа | 2018 |
|
RU2692869C1 |
| Носитель датчиков дефектоскопа внутритрубного ультразвукового | 2018 |
|
RU2692870C1 |
| Устройство для измерения внутреннего профиля трубопровода | 2018 |
|
RU2690973C1 |
| ВНУТРИТРУБНЫЙ МНОГОКАНАЛЬНЫЙ ПРОФИЛЕМЕР С ИСПОЛЬЗОВАНИЕМ ВИХРЕТОКОВЫХ ДАТЧИКОВ | 2021 |
|
RU2772075C1 |
| Способ изготовления стенда сухой протяжки для проверки работоспособности внутритрубных инспекционных приборов на испытательном трубопроводном полигоне | 2017 |
|
RU2653138C1 |
| СИСТЕМА ИЗМЕРИТЕЛЬНАЯ МАГНИТНАЯ ВНУТРИТРУБНАЯ | 2021 |
|
RU2759875C1 |
| СИСТЕМА ПОПЕРЕЧНОГО НАМАГНИЧИВАНИЯ ДЛЯ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА | 2019 |
|
RU2717902C1 |
| Способ определения толщины стенки трубопровода в зоне дефекта типа "потеря металла" на основе статистической стабилизации параметров сигнала по данным ультразвуковой секции WM | 2018 |
|
RU2687846C1 |
| Способ проведения внутритрубной диагностики в подвижной жидкостной пробке | 2017 |
|
RU2650621C1 |
| Способ поверки ультразвукового дефектоскопа и приспособление для его реализации | 2018 |
|
RU2680676C1 |
Изобретение относится к устройствам контроля технического состояния магистральных нефтепроводов, нефтепродуктопроводов неразрушающими методами путем пропуска внутри обследуемого трубопровода внутритрубного ультразвукового дефектоскопа. Измерительная система носителя датчиков содержит держатели, выполненные в виде параллелограммных механизмов, каждый из которых содержит платформу с установленными на ней ультразвуковыми датчиками и роликовыми опорами, обеспечивающими заданное расстояние от ультразвуковых датчиков до внутренней поверхности трубопровода. Платформа установлена с возможностью сохранения своего углового положения относительно продольной оси носителя датчиков при складывании параллелограммного механизма. При этом держатели снабжены датчиками угловых перемещений. Повышается качество диагностики трубопровода в местах с особенностями геометрии трубопровода. 4 ил.
Носитель датчиков дефектоскопа внутритрубного ультразвукового, содержащий соединенные посредством карданных шарниров секции, каждая из которых состоит из корпуса, на котором установлены центрирующие манжеты и измерительная система, включающая ультразвуковые датчики, размещенные на подпружиненных в радиальном направлении держателях, расположенных по окружной периферии и в свободном состоянии раскрытых на диаметр несколько больший, чем внешний диаметр центрирующих манжет, отличающийся тем, что держатели выполнены в виде параллелограммных механизмов, каждый из которых содержит платформу с установленными на ней ультразвуковыми датчиками и роликовыми опорами, обеспечивающими заданное расстояние от ультразвуковых датчиков до внутренней поверхности трубопровода, платформа установлена с возможностью сохранения своего углового положения относительно продольной оси носителя датчиков при складывании параллелограммного механизма, при этом держатели снабжены датчиками угловых перемещений.
| Упругий буферно-тяговой аппарат для вагонов со сквозной упряжью | 1929 |
|
SU14832A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ МАТЕРИАЛА ТРУБОПРОВОДА | 1998 |
|
RU2139469C1 |
| НОСИТЕЛЬ ДАТЧИКОВ ДЛЯ ВНУТРИТРУБНОГО ИНСПЕКЦИОННОГО СНАРЯДА (ВАРИАНТЫ) | 2002 |
|
RU2204113C1 |
| Аппарат защиты шахтных подъемных установок от провисания канатов | 1960 |
|
SU144267A1 |
| Способ изготовления литейных моделей | 1930 |
|
SU24548A1 |
| US 4807484 А1, 28.02.1989. | |||

