Изобретение относится к железнодорожной автоматике и телемеханике и может быть использовано в системах для управления и контроля состояния устройств СЦБ на железнодорожных станциях.
Известна микропроцессорная централизация стрелок и сигналов, представляющая собой объектно-ориентированное программируемое устройство с переменным составом функциональных блоков, необходимых для создания требуемых конфигураций каналов ввода-вывода, конкретных функций и задач железнодорожной автоматики и телемеханики с целью организации перевозочного процесса, ее аппаратное обеспечение реализуется в виде трехуровневой иерархической структуры: информационного обеспечения, логического обеспечения и непосредственного управления, при этом первый уровень информационного обеспечения содержит автоматизированное рабочее место дежурного по станции, которое обеспечивает отображение состояния объектов контроля и управления, а также формирование задач по управлению объектами в диалоговом режиме в реальном масштабе времени, второй уровень логической обработки содержит управляющий вычислительный комплекс, выполняющий прием сигналов управления от первого уровня и формирующий команды устройствам напольного оборудования, и реализующий, в частности, функции управления логикой установки и отмены маршрута, управления показаниями светофоров и стрелками, замыкания и размыкания маршрутов, третий уровень содержит релейно-контактные устройства, которые обеспечивают выполнение команд управляющего вычислительного комплекса по непосредственному управлению напольным оборудованием и контролю за его состоянием, при этом управляющий вычислительный комплекс построен на базе программируемого логического контроллера SIMATIC с переменным составом функций, реализующих по алгоритмам функции и задачи железнодорожной автоматики и телемеханики (RU 102579, B61L 25/04, 10.03.2011).
Маршрутная централизация согласовывается с любыми типами стрелочных электроприводов и светофоров, позволяет интегрировать в свой состав любые системы счета осей, переездную тоннельную и иную сигнализации, системы речевого оповещении, автостопы, контрольно-габаритные устройства, системы интервального регулирования, системы диспетчерского управления и контроля, реализует функции сервиса и самодиагностики.
Недостатком известной микропроцессорной централизации стрелок и сигналов МПЦТ является невозможность применения в ней ответственных команд при нештатных режимах работы, а также сложность ее реализации.
Известна микропроцессорная система управления маршрутами на малых станциях, содержащая два комплекта персональных электронно-вычислительных машин, установленных на автоматизированном рабочем месте дежурного по станции и подключенных к аппаратуре диспетчерской централизации, персональные электронно-вычислительные машины через каналы связи подключены к соответствующим входам управляющего вычислительного комплекса, соединенного с блоком релейных исполнительных устройств, выходы которых являются выходами для подключения напольных устройств, управляющий вычислительный комплекс содержит соединенные между собой основной и резервный вычислительные блоки управления, каждый из которых состоит из ведущего и ведомого блоков, включающих контроллер, соединенный с входами управляющего вычислительного комплекса через блок асинхронного последовательного обмена данными, блок дискретного ввода данных, вход которого соединен с выходом контроллера, к входу которого подключен выход блока приема дискретных сигналов, вход которого подключен к модулю с матричным вводом информации блока релейных исполнительных устройств, выходы блока дискретного ввода данных соединены соответственно с первым входом модуля с матричным вводом информации и входом дешифратора команд, выход которого подключен ко второму входу модуля с матричным вводом информации, дополнительный вход управления блока релейных исполнительных устройств подключен к аварийному пульту управления (RU 90401, B61L 27/04, 10.01.2010). Данное техническое решение выбрано в качестве прототипа.
Недостатком известной микропроцессорной системы управления маршрутами является невозможность управления устройствами СЦБ в нештатных условиях.
Технический результат заключается в расширении функциональных возможностей микропроцессорной системы управления маршрутами за счет обеспечения ее работы с устройствами СЦБ в нештатных условиях.
Технический результат достигается тем, что в микропроцессорной системе управления маршрутами, содержащей установленные на автоматизированном рабочем месте дежурного по станции два персональных компьютера, подключенных через каналы связи к соответствующим входам управляющего вычислительного комплекса, соединенного с блоком релейных исполнительных устройств, выходы которых являются выходами для подключения напольных устройств, управляющий вычислительный комплекс включает соединенные между собой основной и резервный вычислительные блоки управления, каждый из которых состоит из ведущего и ведомого блоков, подключенных к релейному дешифратору команд управления, выход которого подключен к модулю матричного ввода и сбора информации блока релейных исполнительных устройств, согласно изобретению автоматизированное рабочее место дежурного по станции снабжено блоком ввода команд, выходы которого подключены к персональным компьютерам, а в управляющий вычислительный комплекс введен блок отключения релейного дешифратора команд управления, входами/выходами подключенный к релейному дешифратору команд управления и блокам контроля работоспособности соответственно ведущего и ведомого блоков основного и резервного вычислительных блоков управления, каждый из которых входами/выходами подключен к модулю матричного ввода и сбора информации, блок формирования ответственных команд, входы которого подключены к ведущему и ведомому блокам основного и резервного вычислительных блоков управления, один из выходов блока формирования ответственных команд соединен каналом связи с входом релейного дешифратора команд управления, а другой - с входом модуля матричного ввода и сбора информации, в блок релейных исполнительных устройств введен модуль согласования с напольными устройствами, входом подключенный к дополнительному выходу релейного дешифратора команд управления, а выходом соединен с выходом блока релейных исполнительных устройств.
На чертеже представлена функциональная схема микропроцессорной системы управления маршрутами.
Микропроцессорная система управления маршрутами содержит установленные на автоматизированном рабочем месте 1 дежурного по станции два персональных компьютера 2, 3, подключенных через каналы связи к соответствующим входам управляющего вычислительного комплекса 4, соединенного с блоком 5 релейных исполнительных устройств, выходы которых являются выходами для подключения напольных устройств, управляющий вычислительный комплекс 4 включает соединенные между собой основной 6 и резервный 7 вычислительные блоки управления, каждый из которых состоит из ведущего 8 (9) и ведомого 10 (11) блоков, подключенных к релейному дешифратору 12 команд управления, выход которого подключен к модулю 13 матричного ввода и сбора информации блока 5 релейных исполнительных устройств, автоматизированное рабочее место 1 дежурного по станции снабжено блоком 14 ввода команд, выходы которого подключены к персональным компьютерам 2 и 3, в управляющий вычислительный комплекс 4 введен блок 15 отключения релейного дешифратора команд управления, входами/выходами подключенный к релейному дешифратору 12 команд управления и блокам 16 (17) контроля работоспособности соответственно ведущего 8(9) и ведомого 10(11) блоков основного 6 и резервного 7 вычислительных блоков управления, каждый из которых входами/выходами подключен к модулю 13 матричного ввода и сбора информации, блок 18 формирования ответственных команд, входы которого подключены к ведущему 8 (9) и ведомому 10 (11) блокам основного 6 и резервного 7 вычислительных блоков управления, один из выходов блока 18 формирования ответственных команд соединен каналом связи с входом релейного дешифратора 12 команд управления, а другой - с входом модуля 13 матричного ввода и сбора информации, в блок 5 релейных исполнительных устройств введен модуль 19 согласования с напольными устройствами, входом подключенный к дополнительному выходу релейного дешифратора 12 команд управления, а выходом соединен с выходом блока 5 релейных исполнительных устройств.
Микропроцессорная система управления маршрутами работает следующим образом.
Система является релейно-процессорной централизацией, предназначенной для обеспечения безопасности движения поездов. Она обеспечивает выполнение основных функций по контролю состояния объектов и управлению маршрутами, стрелками, светофорами и другими объектами на станции и прилегающих перегонах, и дополнительно выполнение команд по управлению устройствами СЦБ в нештатных режимах работы. К числу таких команд относятся: для стрелочных переводов - перевод стрелок при занятой секции; для устройств контроля схода подвижного состава (УКСПС) и контрольно-габаритных ворот (КГУ) - выключение из зависимостей при открытии входного сигнала, до ремонта этого устройства; для прилегающих перегонов - смена направления для ложной занятости перегона, либо при неисправности самой схемы; для переезда - ручное закрытие, либо открытие переезда и др.
Ответственные команды выполняются только при вводе команд с блока 14. Команды с автоматизированного рабочего места 1 дежурного по станции (АРМ 1) поступают с персонального компьютера 2 (3) и выполняются в два этапа. Вначале они проходят через блок 18 формирования ответственных команд, а затем поступают в релейный дешифратор 12 команд управления.
Персональные компьютеры 2 и 3, обеспечивают отображение состояния объектов управления и формирование заданий по управлению объектами в диалоговом режиме. Для выполнения ответственных команд по управлению устройствами СЦБ в нештатных режимах используется блок 14 ввода команд, обеспечивающий режим управления ответственными функциями. Управляющий вычислительный комплекс 4 обеспечивает сбор данных о состоянии объектов, создание массивов данных, необходимых для управления и контроля, передачу данных в персональные компьютеры, проверку допустимости поступающих от персональных компьютеров команд (проверку зависимостей на программном уровне), управление исполнительными релейными устройствами, диагностику технических средств.
Один из персональных компьютеров является активным (основным), второй находится в состоянии «горячего резерва». Для передачи команды управления формируется сообщение через каналы связи в управляющий вычислительный комплекс 4.
Вычислительные блоки управления 6 (7) состоят из двух блоков - ведущего 8 (9) и ведомого 10 (11). Их статус определен постоянно и в эксплуатации не меняется.
Блоки 8 (9) и 10 (11) содержат модули управления (на чертеже не показаны), которые представляет собой одноплатную микро ЭВМ с шестнадцатиразрядным процессором. Модуль формирует команды управления, которые преобразуются в электрический сигнал, подаваемый на релейный дешифратор 12 команд управления, а в случае выполнения ответственных команд и в блок 18 формирования ответственных команд.
Релейный дешифратор 12 команд управления является устройством сопряжения электронной аппаратуры с модулем 19 согласования с напольными устройствами и с модулем 13 матричного ввода и сбора информации и построен на реле первого класса надежности. Команды на выходе дешифратора 12 присутствуют только на время их передачи исполнительным устройствам электрической централизации (ЭЦ) возбуждением соответствующего исполнительного реле. Если возбуждения исполнительного реле не происходит, то команда сбрасывается по истечении выдержки времени и формируется сообщение о невыполнении команды. В процессе выдачи команды принимают участие три реле: одно объектное и два групповых, расположенных в одном корпусе реле.
Для повышения надежности используется блок 16 (17) контроля работоспособности, работающий по принципу «инвертор полярности» контролирующий работу вычислительных блоков 6 (7) управления. Через блок 15 отключения релейного дешифратора в случае неисправности вычислительных блоков 6 (7) управления отключается управление от релейного дешифратора 12 команд и персональных компьютеров 2 и 3.
Для повышения безопасности блок 18 формирования ответственных команд осуществляет внешний контроль над правильностью выполнения ответственных команд, выдаваемых с персональных компьютеров 2 и 3 через управляющий вычислительный комплекс 4. Контролируется этапность формирования команд, правильная последовательность выдачи команд. Управляющее воздействие на исполнительные устройства через релейный дешифратор 12 команд управления в режиме ответственных команд будет передано только в случае одновременного совпадения команд от ведущего 8 и ведомого 10 активного блока управления. Контроль осуществляется на аппаратном уровне.
Для сбора информации о состоянии контролируемых устройств используется матричный ввод данных, осуществляемый с помощью модуля 13 матричного ввода и сбора информации в блоке 5 релейных исполнительных устройств.
Матрицей сбора данных модуля 13 матричного ввода и сбора информации кроме внешних реле опрашивается и состояние контактов релейного дешифратора 12 команд управления и блока 18 формирования ответственных команд для организации обратной связи. Постоянно контролируется отсутствие несанкционированного возбуждения релейного дешифратора 12 и блока 18 формирования ответственных команд (наличие подпитки), и при обнаружении срабатывания немедленно снимается питание с дешифратора. При сохраняющемся несанкционированном состоянии реле выдается принудительная команда останова активного блока 6 (7) и управление полностью передается на находящийся в «горячем резерве» блок 7 (6).
Примером выполнения ответственной команды является перевод стрелки в требуемое положение при ложной занятости секции, в которую входит стрелка.
Информация о рассматриваемой неисправности (ложная занятость стрелочной секции) от напольных устройств поступает в модуль 13 матричного ввода и сбора информации блока 5 релейных исполнительных устройств и передается в управляющий вычислительный комплекс 4, который посредством блоков 6 (7) управления формирует данные о неисправности и передает их по каналам связи в персональные компьютеры 2 и 3.
При необходимости выполнения перевода стрелки оператор АРМ 1 (дежурный по станции) посредством блока 14 ввода команд переводит режим работы АРМ1 в режим выполнения ответственных команд.
При выполнении ответственной команды дополнительно подключается блок 18 формирования ответственных команд для дополнительной проверки последовательности действий оператора, правильности функционального назначения команды и правильности выбора объекта управления. После выполнения всех требуемых проверок команда от блока 18 формирования ответственных команд передается в релейный дешифратор 12 команд управления. Выполнение ответственной команды осуществляется в два этапа. На каждом этапе управляющий вычислительный комплекс 4 контролирует правильность выполнения команды и состояние блоков 18 и 12 через модуль 13 матричного ввода и сбора информации.
На заключительном этапе ответственная команда управления от блока 18 формирования ответственных команд, переданная на релейный дешифратор 12 команд управления по цепям управления через модуль 19 согласования с напольными устройствами блока 5 релейных исполнительных устройств воздействует на перевод стрелки в требуемое положение.
Контроль выполнения команды осуществляется с использованием модуля 13 матричного ввода и сбора информации блока 5 релейных исполнительных устройств. Информация о выполнении команды поступает в управляющий вычислительный комплекс 4, который посредством вычислительных блоков 6 (7) управления формирует данные о выполнении команды, которые передает по каналам связи в персональные компьютеры 2 и 3.
Таким образом, использование интерфейса ответственных команд микропроцессорной системы управления обеспечивает дополнительный оперативный контроль объектов СЦБ при возникновении нештатных ситуаций на маршрутах управления и своевременное исполнительное воздействие, повышая тем самым безопасность движения маршрутных поездов.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЦЕНТРАЛИЗАЦИИ СТРЕЛОК И СИГНАЛОВ | 2011 |
|
RU2495778C2 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЦЕНТРАЛИЗАЦИИ МПЦ-ЭЛ | 2017 |
|
RU2709068C1 |
| Модульный восстановительный пункт регулирования движения поездов | 2022 |
|
RU2790210C1 |
| Система диспетчерской централизации | 2024 |
|
RU2833087C1 |
| СИСТЕМА ГОРОЧНОЙ МИКРОПРОЦЕССОРНОЙ ЦЕНТРАЛИЗАЦИИ (ГМЦ) | 2017 |
|
RU2648488C1 |
| Микропроцессорная система централизации МПЦ-ЭЛ | 2018 |
|
RU2692739C1 |
| Система микропроцессорной централизации | 2018 |
|
RU2694709C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА АВТОБЛОКИРОВКИ | 2008 |
|
RU2388636C2 |
| Релейно-процессорная электрическая централизация | 2023 |
|
RU2814418C1 |
| МОДУЛЬНЫЙ ВОССТАНОВИТЕЛЬНЫЙ ПУНКТ СИГНАЛИЗАЦИИ, ЦЕНТРАЛИЗАЦИИ И БЛОКИРОВКИ | 2019 |
|
RU2747520C1 |

Изобретение относится к железнодорожной автоматике и телемеханике и может быть использовано в системах для управления и контроля состояния устройств СЦБ на железнодорожных станциях. Микропроцессорная система управления маршрутами содержит блок формирования ответственных команд, АРМ дежурного по станции с двумя персональными компьютерами и блоком ввода команд, блок релейных исполнительных устройств с модулем матричного ввода и сбора информации и модулем согласования с напольными устройствами, а также управляющий вычислительный комплекс, включающий блок отключения релейного дешифратора команд управления, основной и резервный вычислительные блоки управления, каждый из которых состоит из ведущего и ведомого блоков, подключенных к релейному дешифратору команд управления. Достигается расширение функциональных возможностей микропроцессорной системы управления маршрутами за счет обеспечения работы с устройствами СЦБ в нештатных условиях. 1 ил.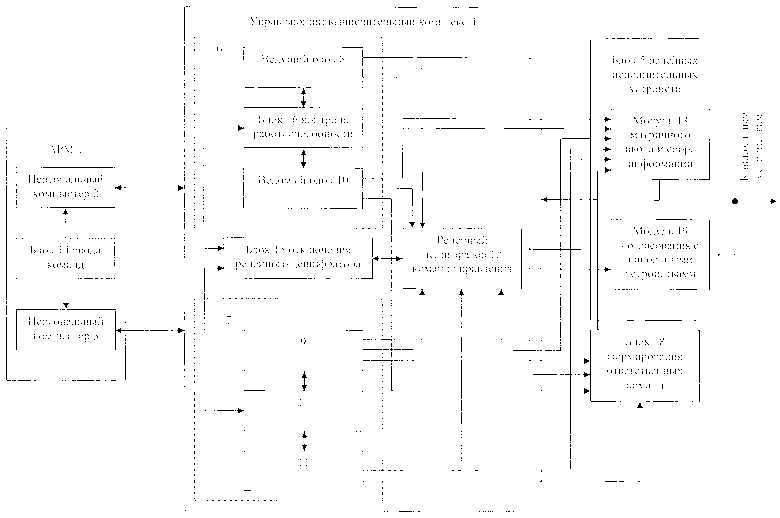
Микропроцессорная система управления маршрутами, содержащая установленные на автоматизированном рабочем месте дежурного по станции два персональных компьютера, подключенных через каналы связи к соответствующим входам управляющего вычислительного комплекса, соединенного с блоком релейных исполнительных устройств, выходы которых являются выходами для подключения напольных устройств, управляющий вычислительный комплекс включает соединенные между собой основной и резервный вычислительные блоки управления, каждый из которых состоит из ведущего и ведомого блоков, подключенных к релейному дешифратору команд управления, выход которого подключен к модулю матричного ввода и сбора информации блока релейных исполнительных устройств, отличающаяся тем, что автоматизированное рабочее место дежурного по станции снабжено блоком ввода команд, выходы которого подключены к персональным компьютерам, а в управляющий вычислительный комплекс введен блок отключения релейного дешифратора команд управления, входами/выходами подключенный к релейному дешифратору команд управления и блокам контроля работоспособности соответственно ведущего и ведомого блоков основного и резервного вычислительных блоков управления, каждый из которых входами/выходами подключен к модулю матричного ввода и сбора информации, блок формирования ответственных команд, входы которого подключены к ведущему и ведомому блокам основного и резервного вычислительных блоков управления, один из выходов блока формирования ответственных команд соединен каналом связи с входом релейного дешифратора команд управления, а другой - с входом модуля матричного ввода и сбора информации, в блок релейных исполнительных устройств введен модуль согласования с напольными устройствами, входом подключенный к дополнительному выходу релейного дешифратора команд управления, а выходом соединен с выходом блока релейных исполнительных устройств.
| Устройство для подогрева нагнетаемой пожарным насосом воды в зимнее время | 1950 |
|
SU90401A1 |
| 0 |
|
SU102579A1 | |
| Двухчелюстный грейфер | 1949 |
|
SU79083A1 |
| Автоматический многопильный станок для распиловки сахарных голов | 1933 |
|
SU40284A1 |
| Способ рафинирования цветных металлов (свинца, меди, цинка, олова) | 1927 |
|
SU15306A1 |
| Способ консервации двигателя внутреннего сгорания | 1989 |
|
SU1693273A1 |

